KR20120072892A - 양안시차 및 깊이 정보를 이용한 애너그리프 영상 생성 방법 및 장치 - Google Patents
양안시차 및 깊이 정보를 이용한 애너그리프 영상 생성 방법 및 장치 Download PDFInfo
- Publication number
- KR20120072892A KR20120072892A KR1020100134816A KR20100134816A KR20120072892A KR 20120072892 A KR20120072892 A KR 20120072892A KR 1020100134816 A KR1020100134816 A KR 1020100134816A KR 20100134816 A KR20100134816 A KR 20100134816A KR 20120072892 A KR20120072892 A KR 20120072892A
- Authority
- KR
- South Korea
- Prior art keywords
- image
- pixel
- depth map
- generating
- anaglyph
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/10—Processing, recording or transmission of stereoscopic or multi-view image signals
- H04N13/106—Processing image signals
- H04N13/156—Mixing image signals
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/20—Image signal generators
- H04N13/257—Colour aspects
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/20—Image signal generators
- H04N13/271—Image signal generators wherein the generated image signals comprise depth maps or disparity maps
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/30—Image reproducers
- H04N13/332—Displays for viewing with the aid of special glasses or head-mounted displays [HMD]
- H04N13/334—Displays for viewing with the aid of special glasses or head-mounted displays [HMD] using spectral multiplexing
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Physics & Mathematics (AREA)
- Spectroscopy & Molecular Physics (AREA)
- Testing, Inspecting, Measuring Of Stereoscopic Televisions And Televisions (AREA)
- Processing Or Creating Images (AREA)
Abstract
Description
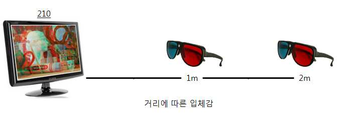
도 2는 본 발명의 일 예에 따른 디스플레이 및 시청자 간의 거리에 따른 입체감을 예시한다.
도 3은 본 발명의 일 예에 따른 애너그리프 영상의 초점 문제를 예시한다.
도 4는 본 발명의 일 실시예에 따른 애너그리프 영상 생성 장치의 구조도이다.
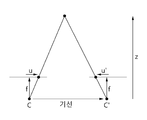
도 5는 본 발명의 일 예에 따른 스테레오 영상의 기하 구조에 따른 깊이 맵의 생성 방법을 설명한다.
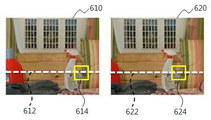
도 6은 본 발명의 일 예에 따른 깊이 맵 생성 방법을 설명한다.
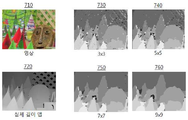
도 7은 본 발명의 일 예에 따른 서로 상이한 크기를 사용하여 생성된 깊이 맵들을 도시한다.
도 8은 본 발명의 일 예에 따른 양안시차에 기반한 이동된 영상의 생성 방법을 설명한다.
도 9는 본 발명의 일 실시예에 따른 애너그리프 영상의 생성을 설명한다.
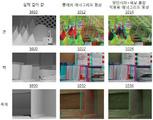
도 10은 본 발명의 일 예에 따른 애너그리프 영상의 생성 예를 도시한다.
도 11은 본 발명의 일 실시예에 따른 애너그리프 영상 출력 장치의 구조도이다.
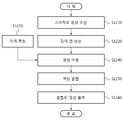
도 12는 본 발명의 일 실시예에 따른 애너그리프 영상 생성 방법의 흐름도이다.



| 시청자 및 영상 간의 거리 (mm) | 양안시차 (mm) | 픽셀의 이동량 |
| 400 | 2.8 | 10 |
| 500 | 2.2 | 8 |
| 600 | 1.9 | 7 |
| 700 | 1.6 | 6 |

420: 깊이 맵 생성부
430: 영상 이동부
440: 색상 혼합부
Claims (23)
- 스테레오 영상에 기반하여 애너그래프 영상을 생성하는 애너그리프 영상 생성 장치에 있어서,
제1 영상 및 제2 영상에 기반하여 깊이 맵을 생성하는 깊이 맵 생성부;
상기 깊이 맵 및 시청자의 양안시차에 기반하여 상기 제1 영상 내의 픽셀들을 이동시킴으로써 이동된 제1 영상을 생성하는 영상 이동부; 및
상기 이동된 제1 영상 및 상기 제2 영상에 기반하여 애너그리프 영상을 생성하는 색상 혼합부
를 포함하고, 제1 영상 및 제2 영상은 각각 상기 스테레오 영상 중 한 편의 영상인, 애너그리프 영상 생성 장치. - 제1항에 있어서,
상기 제1 영상 및 상기 제2 영상을 수신하는 스테레오 영상 수신부
를 더 포함하는, 애너그리프 영상 생성 장치. - 제1항에 있어서,
상기 애너그리프 영상 생성 장치 내에 저장된 데이터를 독출하여 상기 제1 영상 및 상기 제2 영상을 제공하는 저장부
를 더 포함하는, 애너그리프 영상 생성 장치. - 제1항에 있어서,
상기 제1 영상은 좌측 영상이고, 상기 제2 영상은 우측 영상인, 애너그리프 영상 생성 장치. - 제1항에 있어서,
상기 깊이 맵 생성부는 상기 제1 영상 내의 제1 픽셀과 대응하는 상기 제2 영상 내의 제2 픽셀을 검출하고, 상기 제1 픽셀의 좌표 및 상기 제2 픽셀의 좌표 간의 차에 기반하여 상기 제1 픽셀의 깊이를 계산하는, 애너그리프 영상 생성 장치. - 제4항에 있어서,
상기 깊이 맵 생성부는 상기 제1 픽셀을 포함하는 제1 블록을 설정하고, 상기 제1 블록과의 정합도가 가장 높은 상기 제2 영상 내의 제2 블록을 검출함으로써 상기 제1 픽셀의 깊이를 계산하는, 애너그리프 영상 생성 장치. - 제6항에 있어서,
상기 깊이 맵 생성부는 상기 제1 블록이 위치한 수평 위치에서 블록들을 스캔함으로써 상기 제2 블록을 검출하는, 애너그리프 영상 생성 장치. - 제6항에 있어서,
상기 깊이 맵 생성부는 SSD(Sum of Square Differences; 제곱 차들의 총 합)에 기반하여 블록들 간의 정합도를 계산하는, 애너그리프 영상 생성 장치. - 제6항에 있어서,
상기 깊이 맵 생성부는 하기의 수학식 1에 기반하여 상기 깊이 맵을 생성하는, 애너그리프 영상 생성 장치.
[수학식 1]

여기서, (x, y)는 상기 제1 픽셀의 좌표이고, N(x, y)는 상기 제1 픽셀을 중심으로 한 상기 제1 블록이고, (i, j)는 상기 제1 블록 내의 픽셀의 좌표이고, I L (x, y)는 상기 제1 영상 내의 좌표가 (x, y)인 픽셀의 픽셀 값이고, I R (x, y)는 상기 제2 영상 내의 좌표가 (x, y)인 픽셀의 픽셀 값이고, d는 상기 깊이 맵 생성부의 스캔 범위 내에 존재하는 변이이고, d(x, y)는 상기 제1 픽셀의 최종적인 변이 값임. - 제6항에 있어서,
상기 깊이 맵 생성부는 상기 제1 영상의 실제 깊이 맵과 가장 근사한 깊이 맵을 생성하는 것으로 실험적으로 판정된 크기로 상기 제1 블록을 설정하는, 애너그리프 영상 생성 장치. - 제1항에 있어서,
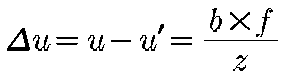
상기 영상 이동부는 상기 제1 영상 내의 제1 픽셀을 픽셀의 이동량 및 상기 제1 픽셀의 변의 값의 차만큼 이동시키고, 상기 픽셀의 이동량은 상기 양안시차에 의해 결정되는, 애너그리프 영상 생성 장치. - 제1항에 있어서,
상기 영상 이동부는 상기 시청자의 평균적인 시청 거리에 기반하여 상기 양안시차의 값을 결정하는, 애너그리프 영상 생성 장치. - 제1항에 있어서,
상기 색상 혼합부는 상기 이동된 제1 영상의 그린 채널 및 블루 채널에 기반하여 상기 애너그리프 영상의 레드 채널을 생성하고, 상기 제2 영상의 그린 채널에 기반하여 상기 애너그리프 영상의 그린 채널을 생성하고, 상기 제2 영상의 블루 채널에 기반하여 상기 애너그리프 영상의 블루 채널을 생성하는, 애너그리프 영상 생성 장치. - 스테레오 영상에 기반하여 애너그래프 영상을 생성하는 애너그리프 영상 생성 장치에 있어서,
상기 제1 영상 및 제2 영상에 기반하여 깊이 맵을 생성하는 깊이 맵 생성부;
상기 깊이 맵 및 시청자의 양안시차에 기반하여 상기 제1 영상 내의 픽셀들을 이동시킴으로써 이동된 제1 영상을 생성하는 영상 이동부;
상기 이동된 제1 영상 및 상기 제2 영상에 기반하여 애너그리프 영상을 생성하는 색상 혼합부; 및
상기 애너그리프 영상을 출력하는 디스플레이부
를 포함하고, 상기 영상 이동부는 상기 시청자 및 상기 디스플레이부 간의 거리에 기반하여 상기 양안시차의 값을 결정하는 제1 영상 및 제2 영상은 각각 상기 스테레오 영상 중 한 편의 영상인, 애너그리프 영상 출력 장치. - 제14항에 있어서,
상기 거리를 측정하여, 상기 측정된 거리를 상기 영상 이동부에게 제공하는 거리 측정부를 더 포함하는, 애너그리프 영상 출력 장치. - 제15항에 있어서,
상기 거리 측정부는 상기 시청자의 변화하는 위치를 동적으로 검출하고, 상기 동적으로 검출된 시청자의 위치에 기반하여 상기 디스플레이부 및 상기 시청자 간의 거리를 동적으로 계산하며, 상기 영상 이동부는 상기 동적으로 계산된 거리에 기반하여 상기 양안시차의 값을 동적으로 변경하고, 상기 변경된 양안시차의 값에 기반하여 상기 이동된 제1 영상을 생성하는, 애너그리프 영상 출력 장치. - 제16항에 있어서,
상기 영상 이동부는 상기 제1 영상 내의 제1 픽셀을 픽셀의 이동량 및 상기 제1 픽셀의 변의 값의 차만큼 이동시키고, 상기 픽셀의 이동량은 상기 거리 및 상기 디스플레이부의 픽셀 피치에 기반하여 결정되는, 애너그리프 영상 생성 장치. - 스테레오 영상에 기반하여 애너그래프 영상을 생성하는 애너그리프 영상 생성 방법에 있어서,
상기 제1 영상 및 상기 제2 영상에 기반하여 깊이 맵을 생성하는 깊이 맵 생성 단계;
상기 깊이 맵 및 시청자의 양안시차에 기반하여 상기 제1 영상 내의 픽셀들을 이동시킴으로써 이동된 제1 영상을 생성하는 영상 이동 단계; 및
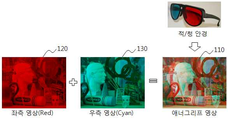
상기 이동된 제1 영상 및 상기 제2 영상에 기반하여 애너그리프 영상을 생성하는 색상 혼합 단계
를 포함하고, 제1 영상 및 제2 영상은 각각 상기 스테레오 영상 중 한 편의 영상인, 애너그리프 영상 생성 방법. - 제18항에 있어서,
상기 깊이 맵 생성 단계는,
상기 제1 영상 내의 제1 픽셀과 대응하는 상기 제2 영상 내의 제2 픽셀을 검출하는 단계; 및
상기 제1 픽셀의 좌표 및 상기 제2 픽셀의 좌표 간의 차에 기반하여 상기 제1 픽셀의 깊이를 계산하는 단계
를 포함하는, 애너그리프 영상 생성 방법. - 제18항에 있어서,
상기 깊이 맵 생성 단계는,
상기 제1 픽셀을 포함하는 제1 블록을 설정하는 단계; 및
상기 제1 블록과의 정합도가 가장 높은 상기 제2 영상 내의 제2 블록을 검출함으로써 상기 제1 픽셀의 깊이를 계산하는 단계
룰 포함하는, 애너그리프 영상 생성 방법. - 제20항에 있어서,
상기 블록들 간의 정합도는 SSD에 기반하여 계산되는, 애너그리프 영상 생성 방법. - 제18항에 있어서,
상기 영상 이동 단계는,
상기 제1 영상 내의 제1 픽셀을 픽셀의 이동량 및 상기 제1 픽셀의 변의 값의 차만큼 이동시키는 단계
를 포함하고, 상기 픽셀의 이동량은 상기 양안시차에 의해 결정되는, 애너그리프 영상 생성 방법. - 제1항에 있어서,
상기 색상 혼합 단계는,
상기 이동된 제1 영상의 그린 채널 및 블루 채널에 기반하여 상기 애너그리프 영상의 레드 채널을 생성하는 단계;
상기 제2 영상의 그린 채널에 기반하여 상기 애너그리프 영상의 그린 채널을 생성하는 단계; 및
상기 제2 영상의 블루 채널에 기반하여 상기 애너그리프 영상의 블루 채널을 생성하는 단계
를 포함하는, 애너그리프 영상 생성 방법.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020100134816A KR101192121B1 (ko) | 2010-12-24 | 2010-12-24 | 양안시차 및 깊이 정보를 이용한 애너그리프 영상 생성 방법 및 장치 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020100134816A KR101192121B1 (ko) | 2010-12-24 | 2010-12-24 | 양안시차 및 깊이 정보를 이용한 애너그리프 영상 생성 방법 및 장치 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20120072892A true KR20120072892A (ko) | 2012-07-04 |
| KR101192121B1 KR101192121B1 (ko) | 2012-10-16 |
Family
ID=46707499
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020100134816A Expired - Fee Related KR101192121B1 (ko) | 2010-12-24 | 2010-12-24 | 양안시차 및 깊이 정보를 이용한 애너그리프 영상 생성 방법 및 장치 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR101192121B1 (ko) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20140076085A (ko) * | 2012-12-12 | 2014-06-20 | 엘지디스플레이 주식회사 | 디스패러티 산출방법과 이를 이용한 입체영상 표시장치 |
| WO2015142137A1 (ko) * | 2014-03-21 | 2015-09-24 | 삼성전자 주식회사 | 전자 장치, 영상 처리 방법, 및 컴퓨터 판독가능 기록매체 |
| US12003697B2 (en) | 2021-05-06 | 2024-06-04 | Samsung Electronics Co., Ltd. | Wearable electronic device and method of outputting three-dimensional image |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR100776805B1 (ko) | 2006-09-29 | 2007-11-19 | 한국전자통신연구원 | 스테레오 비전 처리를 통해 지능형 서비스 로봇 시스템에서효율적인 영상 정보의 전송을 위한 장치 및 그 방법 |
-
2010
- 2010-12-24 KR KR1020100134816A patent/KR101192121B1/ko not_active Expired - Fee Related
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20140076085A (ko) * | 2012-12-12 | 2014-06-20 | 엘지디스플레이 주식회사 | 디스패러티 산출방법과 이를 이용한 입체영상 표시장치 |
| WO2015142137A1 (ko) * | 2014-03-21 | 2015-09-24 | 삼성전자 주식회사 | 전자 장치, 영상 처리 방법, 및 컴퓨터 판독가능 기록매체 |
| US10860166B2 (en) | 2014-03-21 | 2020-12-08 | Samsung Electronics Co., Ltd. | Electronic apparatus and image processing method for generating a depth adjusted image file |
| US12003697B2 (en) | 2021-05-06 | 2024-06-04 | Samsung Electronics Co., Ltd. | Wearable electronic device and method of outputting three-dimensional image |
Also Published As
| Publication number | Publication date |
|---|---|
| KR101192121B1 (ko) | 2012-10-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101629479B1 (ko) | 능동 부화소 렌더링 방식 고밀도 다시점 영상 표시 시스템 및 방법 | |
| US7983477B2 (en) | Method and apparatus for generating a stereoscopic image | |
| CN101783967B (zh) | 信号处理设备、图像显示设备、信号处理方法和计算机程序 | |
| JP6308513B2 (ja) | 立体画像表示装置、画像処理装置及び立体画像処理方法 | |
| US8817073B2 (en) | System and method of processing 3D stereoscopic image | |
| US8606043B2 (en) | Method and apparatus for generating 3D image data | |
| US9754379B2 (en) | Method and system for determining parameters of an off-axis virtual camera | |
| KR101697181B1 (ko) | 사용자의 시선 추적을 이용한 영상 처리 장치 및 방법 | |
| JP6128442B2 (ja) | 立体画像および画像シーケンスのステレオベース拡張のための方法および装置{method and device for stereo base extension of stereoscopic images and image sequences} | |
| CN102905145B (zh) | 立体影像系统、影像产生方法、影像调整装置及其方法 | |
| KR20120016408A (ko) | 3차원 컨텐츠를 출력하는 디스플레이 기기의 영상 출력 방법 및 그 방법을 채용한 디스플레이 기기 | |
| JP2014093779A (ja) | 映像処理方法及び映像処理装置 | |
| US9477305B2 (en) | Stereoscopic image display apparatus and computer-readable recording medium storing program thereon | |
| KR20120030005A (ko) | 화상 처리 장치 및 방법과 입체 화상 표시 장치 | |
| KR20120051287A (ko) | 사용자 위치 기반의 영상 제공 장치 및 방법 | |
| JPH08115439A (ja) | 画像データ処理装置及び画像再生装置 | |
| JP5840022B2 (ja) | 立体画像処理装置、立体画像撮像装置、立体画像表示装置 | |
| CN107155102A (zh) | 3d自动对焦显示方法及其系统 | |
| KR101192121B1 (ko) | 양안시차 및 깊이 정보를 이용한 애너그리프 영상 생성 방법 및 장치 | |
| JP2015037282A (ja) | 画像処理装置、画像処理方法及びプログラム | |
| KR20190016139A (ko) | 입체 비디오 생성 | |
| KR101907127B1 (ko) | 입체 비디오 주밍 및 비디오 내의 전경 및 배경 검출 | |
| KR101939243B1 (ko) | 입체 깊이 조정 및 초점 조정 | |
| KR102700868B1 (ko) | 3d객체에 대한 디스패리티의 조정을 수행하는 무안경 입체영상 표시장치 | |
| JP6179282B2 (ja) | 3次元画像表示装置及び3次元画像表示方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| PA0109 | Patent application |
St.27 status event code: A-0-1-A10-A12-nap-PA0109 |
|
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| D13-X000 | Search requested |
St.27 status event code: A-1-2-D10-D13-srh-X000 |
|
| D14-X000 | Search report completed |
St.27 status event code: A-1-2-D10-D14-srh-X000 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U11-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-5-5-R10-R18-oth-X000 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-5-5-R10-R18-oth-X000 |
|
| FPAY | Annual fee payment |
Payment date: 20151001 Year of fee payment: 4 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 4 |
|
| FPAY | Annual fee payment |
Payment date: 20161004 Year of fee payment: 5 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 5 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |
|
| LAPS | Lapse due to unpaid annual fee | ||
| PC1903 | Unpaid annual fee |
St.27 status event code: A-4-4-U10-U13-oth-PC1903 Not in force date: 20171011 Payment event data comment text: Termination Category : DEFAULT_OF_REGISTRATION_FEE |
|
| PC1903 | Unpaid annual fee |
St.27 status event code: N-4-6-H10-H13-oth-PC1903 Ip right cessation event data comment text: Termination Category : DEFAULT_OF_REGISTRATION_FEE Not in force date: 20171011 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-5-5-R10-R18-oth-X000 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-5-5-R10-R18-oth-X000 |