KR20120121373A - 물체 인식 방법 및 인식 장치 - Google Patents
물체 인식 방법 및 인식 장치 Download PDFInfo
- Publication number
- KR20120121373A KR20120121373A KR1020120043869A KR20120043869A KR20120121373A KR 20120121373 A KR20120121373 A KR 20120121373A KR 1020120043869 A KR1020120043869 A KR 1020120043869A KR 20120043869 A KR20120043869 A KR 20120043869A KR 20120121373 A KR20120121373 A KR 20120121373A
- Authority
- KR
- South Korea
- Prior art keywords
- image
- fisheye
- fisheye image
- database
- recognition
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images











Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T3/00—Geometric image transformations in the plane of the image
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/10—Image acquisition
- G06V10/12—Details of acquisition arrangements; Constructional details thereof
- G06V10/14—Optical characteristics of the device performing the acquisition or on the illumination arrangements
- G06V10/147—Details of sensors, e.g. sensor lenses
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/40—Extraction of image or video features
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/70—Arrangements for image or video recognition or understanding using pattern recognition or machine learning
- G06V10/74—Image or video pattern matching; Proximity measures in feature spaces
- G06V10/75—Organisation of the matching processes, e.g. simultaneous or sequential comparisons of image or video features; Coarse-fine approaches, e.g. multi-scale approaches; using context analysis; Selection of dictionaries
- G06V10/754—Organisation of the matching processes, e.g. simultaneous or sequential comparisons of image or video features; Coarse-fine approaches, e.g. multi-scale approaches; using context analysis; Selection of dictionaries involving a deformation of the sample pattern or of the reference pattern; Elastic matching
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V2201/00—Indexing scheme relating to image or video recognition or understanding
- G06V2201/11—Technique with transformation invariance effect
Landscapes
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Multimedia (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Health & Medical Sciences (AREA)
- General Health & Medical Sciences (AREA)
- Vascular Medicine (AREA)
- Artificial Intelligence (AREA)
- Computing Systems (AREA)
- Databases & Information Systems (AREA)
- Evolutionary Computation (AREA)
- Medical Informatics (AREA)
- Software Systems (AREA)
- Signal Processing (AREA)
- Image Analysis (AREA)
- Image Processing (AREA)
Abstract
물체의 인식을 행하는 대상 어안 화상(110)의 왜곡의 방향에 맞추어 영역을 분할하고(120), 물체 인식부(130)가 각각의 영역마다 준비한 데이터베이스(140)를 사용하여 물체 인식을 행한다. 또한, 대상 어안 화상(100)에 회전 처리를 행한 복수의 대상 어안 화상에 대해서도 동일한 처리를 행하고, 검출 좌표 역변환부(150)가 얻은 물체 위치를 역회전에 의해 원래의 위치로 되돌리고, 그 얻은 결과를 검출 결과로서 출력한다. 이로써, 물체 인식의 검출 정밀도의 향상, 데이터베이스의 데이터량의 삭감이 가능하다. 또한, 어안 화상에 대한 물체 인식을 위한 데이터베이스 작성에는, 데이터베이스 작성에 필요로 하는 물체 화상을 회전시킨 것을 이용한다.
Description
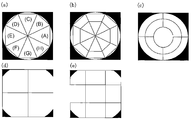
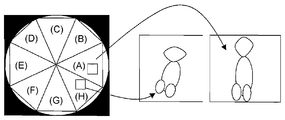
도 2는 어안 화상을 그 중심을 기준으로 하여 8개의 영역에 분할한 경우의 각 영역에서의 물체의 찍히는 방식의 상위를 설명하는 도면이다.
도 3은 본 발명의 제2 기본 사상에 의한 인식 방법에서의 어안 화상의 회전 방법을 설명하는 도면이다.
도 4는 지면에 대하여 수직인 위쪽에서의 촬영의 예와 그때 촬영된 어안 화상의 예를 나타낸 도면이다.
도 5는 대상으로 하는 어안 화상을 회전시킴으로써, 어안 화상에 포함된 검출하고 싶은 대상 물체의 인식을 행하는 것이 가능해지는 것을 설명하는 도면이다.
도 6은 하나의 데이터베이스 작성용의 화상으로부터 복수의 데이터베이스 작성용의 화상 데이터를 작성하는 방법을 설명하는 도면이다.
도 7은 어느 영역의 데이터베이스의 화상 데이터로부터 다른 영역용의 데이터베이스의 화상 데이터를 작성하는 방법을 설명하는 도면이다.
도 8은 본 발명의 제3 기본 사상에 의한 물체의 인식 방법을 설명하는 도면이다.
도 9는 본 발명의 일 실시예에 의한 물체 인식 장치의 기능 구성을 나타낸 블록도이다.
도 10은 본 발명의 일 실시예에 의한 물체 인식 장치의 하드웨어 구성을 나타낸 블록도이다.
도 11은 도 10에 나타낸 물체 인식 장치에서의 어안 카메라의 설치예를 나타낸 도면이다.
도 12는 어안 카메라에 의해 촬영한 화상 내의 물체의 인식을 행하기 위해 사용하는 데이터베이스의 작성 방법을 설명하는 도면(그 1)이다.
도 13은 어안 카메라에 의해 촬영한 화상 내의 물체의 인식을 행하기 위해 사용하는 데이터베이스의 작성 방법을 설명하는 도면(그 2)이다.
210: 어안 카메라
220: 화상 입력부
230: 화상 회전부
240: 메모리
241: 영역별 데이터베이스
250: 물체 인식부
251: 물체 인식 알고리즘
252: 화상 저장용 메모리
260: 검출 좌표 변환부
270: 검출 결과 출력부
Claims (8)
- 어안 카메라에 의해 촬영된 어안 화상을 그대로 이용하여 어안 화상 내에 포함된 물체를 인식하는 물체 인식 장치에서의 물체 인식 방법에 있어서,
상기 물체 인식 장치는, 상기 어안 카메라로부터 입력되는 어안 화상으로부터 어안 화상 내에 포함된 검출하고 싶은 대상 물체를 인식하는 물체 인식부와, 입력되는 어안 화상의 왜곡의 방향에 맞추어 상기 입력되는 어안 화상을 복수로 분할하는 분할 영역을 정해 복수의 분할 영역으로 분할하고, 상기 분할된 분할 영역마다 대응하는 검출하고 싶은 대상 물체의 인식에 사용하는 영역별 데이터베이스를 포함하여 구성되고,
상기 물체 인식부는, 상기 입력되는 어안 화상의 분할 영역마다 대응하는 상기 영역별 데이터베이스를 사용하여 입력된 상기 어안 화상으로부터 상기 어안 화상 내에 포함된 검출하고 싶은 대상 물체의 검출 인식을 행하는, 물체 인식 방법. - 제1항에 있어서,
상기 물체 인식 장치는 상기 입력되는 어안 화상을 회전시키는 화상 회전부를 더 포함하고,
상기 화상 회전부는 상기 입력되는 어안 화상을 미리 정해진 각도씩 회전시켜, 회전된 복수의 어안 화상을 작성하고,
상기 물체 인식부는, 상기 입력되는 회전되지 않은 어안 화상 및 상기 회전된 복수의 어안 화상 각각에 대하여, 상기 분할 영역마다 검출하고 싶은 대상 물체의 검출 인식을 행하는, 물체 인식 방법. - 제2항에 있어서,
상기 물체 인식 장치는 검출 좌표 변환부를 더 포함하고,
상기 검출 좌표 변환부는, 상기 물체 인식부에 의해 검출 인식된 대상 물체가 상기 회전되지 않은 어안 화상과 상기 회전된 복수의 어안 화상 중 어느 어안 화상으로부터 검출되었는지에 따라, 검출 결과인 물체의 검출 좌표를 회전전 어안 화상의 좌표로 변환하는, 물체 인식 방법. - 제1항 내지 제3항 중 어느 한 항에 있어서,
상기 영역별 데이터베이스는, 검출하고 싶은 대상 물체가 찍혀있는 데이터베이스 작성에 사용하는 어안 화상을 회전시키고, 검출하고 싶은 대상 물체의 데이터를 잘라냄으로써 작성하는, 물체 인식 방법. - 어안 카메라에 의해 촬영된 어안 화상을 그대로 이용하여 어안 화상 내에 포함된 물체를 인식하는 물체 인식 장치에 있어서,
상기 어안 카메라로부터 입력되는 어안 화상으로부터 어안 화상 내에 포함된 검출하고 싶은 대상 물체를 인식하는 물체 인식부, 및
입력되는 어안 화상의 왜곡의 방향에 맞추어 상기 입력되는 어안 화상을 복수로 분할하는 분할 영역을 정하여 복수의 분할 영역으로 분할하고, 상기 분할된 분할 영역마다 대응하는 검출하고 싶은 대상 물체의 인식에 사용하는 영역별 데이터베이스
를 포함하고,
상기 물체 인식부는, 상기 입력되는 어안 화상의 분할 영역마다 대응하는 상기 영역별 데이터베이스를 사용하여 입력된 상기 어안 화상으로부터 상기 어안 화상 내에 포함된 검출하고 싶은 대상 물체의 검출 인식을 행하는, 물체 인식 장치. - 제5항에 있어서,
상기 입력되는 어안 화상을 회전시키는 화상 회전부를 더 포함하고,
상기 화상 회전부는, 상기 입력되는 어안 화상을 미리 정해진 각도씩 회전시켜 회전된 복수의 어안 화상을 작성하고,
상기 물체 인식부는, 상기 입력되는 회전되지 않은 어안 화상 및 상기 회전된 복수의 어안 화상 각각에 대하여, 상기 분할 영역마다 검출하고 싶은 대상 물체의 검출 인식을 행하는, 물체 인식 장치. - 제6항에 있어서,
검출 좌표 변환부를 더 포함하고,
상기 검출 좌표 변환부는, 상기 물체 인식부에 의해 검출 인식된 대상 물체가 상기 회전되지 않은 어안 화상과 상기 회전된 복수의 어안 화상 중 어느 어안 화상으로부터 검출되었는지에 따라, 검출 결과인 물체의 검출 좌표를 회전전 어안 화상의 좌표로 변환하는, 물체 인식 장치. - 제5항 내지 제7항 중 어느 한 항에 있어서,
상기 영역별 데이터베이스는, 검출하고 싶은 대상 물체가 찍혀 있는 데이터베이스 작성에 사용하는 어안 화상을 회전시키고, 검출하고 싶은 대상 물체의 데이터를 잘라냄으로써 작성된 것인, 물체 인식 장치.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JPJP-P-2011-098347 | 2011-04-26 | ||
| JP2011098347A JP5739722B2 (ja) | 2011-04-26 | 2011-04-26 | 物体認識方法及び認識装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20120121373A true KR20120121373A (ko) | 2012-11-05 |
| KR101374643B1 KR101374643B1 (ko) | 2014-03-14 |
Family
ID=46229179
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020120043869A Expired - Fee Related KR101374643B1 (ko) | 2011-04-26 | 2012-04-26 | 물체 인식 방법 및 인식 장치 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20120274782A1 (ko) |
| EP (1) | EP2518663A3 (ko) |
| JP (1) | JP5739722B2 (ko) |
| KR (1) | KR101374643B1 (ko) |
| CN (1) | CN102831386B (ko) |
Families Citing this family (29)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2645701A1 (en) * | 2012-03-29 | 2013-10-02 | Axis AB | Method for calibrating a camera |
| JP5975966B2 (ja) | 2013-10-30 | 2016-08-23 | 京セラドキュメントソリューションズ株式会社 | 画像形成装置 |
| JP6156212B2 (ja) * | 2014-03-18 | 2017-07-05 | 株式会社デンソー | 物体検出装置 |
| JP2015210702A (ja) * | 2014-04-28 | 2015-11-24 | キヤノン株式会社 | 画像処理装置及び画像処理方法 |
| JP6074750B2 (ja) * | 2014-05-23 | 2017-02-08 | パナソニックIpマネジメント株式会社 | 画像切替装置、画像切替システム、及び画像切替方法 |
| CN104167002B (zh) * | 2014-08-28 | 2017-01-11 | 中国矿业大学 | 鱼眼图像的有效区域提取方法 |
| JP6548900B2 (ja) * | 2015-01-20 | 2019-07-24 | 株式会社デンソーテン | 画像生成装置、画像生成方法及びプログラム |
| JP2016171526A (ja) * | 2015-03-13 | 2016-09-23 | 株式会社東芝 | 画像センサ、人検出方法、制御システム、制御方法及びコンピュータプログラム |
| JP6732509B2 (ja) * | 2016-04-15 | 2020-07-29 | キヤノン株式会社 | 画像処理装置、画像処理装置の制御方法及びプログラム |
| IL247101B (en) * | 2016-08-03 | 2018-10-31 | Pointgrab Ltd | Method and system for determining present in the image |
| JP6727998B2 (ja) * | 2016-09-08 | 2020-07-22 | キヤノン株式会社 | 画像処理装置、画像処理方法及びプログラム |
| EP3523777A4 (en) * | 2016-12-06 | 2019-11-13 | SZ DJI Technology Co., Ltd. | SYSTEM AND METHOD FOR CONFIGURING A WIDE ANGLE IMAGE |
| JP6688277B2 (ja) * | 2017-12-27 | 2020-04-28 | 本田技研工業株式会社 | プログラム、学習処理方法、学習モデル、データ構造、学習装置、および物体認識装置 |
| EP3819864A4 (en) | 2018-07-02 | 2021-08-18 | Konica Minolta, Inc. | TARGET OBJECT DETECTION PROGRAM AND TARGET OBJECT DETECTION DEVICE |
| WO2020022780A1 (en) * | 2018-07-25 | 2020-01-30 | Samsung Electronics Co., Ltd. | Method and apparatus for establishing device connection |
| CN109840883B (zh) * | 2019-01-10 | 2022-12-23 | 达闼机器人股份有限公司 | 一种训练物体识别神经网络的方法、装置及计算设备 |
| JP7005546B2 (ja) | 2019-03-15 | 2022-01-21 | 株式会社東芝 | 画像認識装置、画像認識方法および画像認識プログラム |
| CN110009684A (zh) * | 2019-04-15 | 2019-07-12 | 云南民族大学 | 一种用于捣固作业下轨枕定位方法 |
| WO2020250387A1 (ja) * | 2019-06-13 | 2020-12-17 | 日本電気株式会社 | 画像処理装置、画像処理方法及びプログラム |
| JP7414456B2 (ja) * | 2019-10-11 | 2024-01-16 | 日立造船株式会社 | 情報処理装置、同一性判定方法、および同一性判定プログラム |
| WO2021102911A1 (zh) * | 2019-11-29 | 2021-06-03 | 深圳市大疆创新科技有限公司 | 一种图像检测方法、图像检测设备及存储介质 |
| CN115136188A (zh) * | 2020-03-05 | 2022-09-30 | 索尼半导体解决方案公司 | 信息处理装置和信息处理方法 |
| CN111754394B (zh) * | 2020-06-29 | 2022-06-10 | 苏州科达科技股份有限公司 | 鱼眼图像中的对象检测方法、装置及存储介质 |
| US11640701B2 (en) * | 2020-07-31 | 2023-05-02 | Analog Devices International Unlimited Company | People detection and tracking with multiple features augmented with orientation and size based classifiers |
| CN112101361B (zh) * | 2020-11-20 | 2021-04-23 | 深圳佑驾创新科技有限公司 | 针对鱼眼图像的目标检测方法、装置、设备和存储介质 |
| JP7708572B2 (ja) * | 2021-03-30 | 2025-07-15 | 本田技研工業株式会社 | 移動体の制御装置、制御方法及びプログラム |
| US11763497B2 (en) | 2021-10-19 | 2023-09-19 | Toyota Motor Engineering & Manufacturing North America, Inc. | Methods and systems for generating simulated datasets for fisheye camera applications |
| CN114359834B (zh) * | 2022-01-06 | 2025-01-21 | 腾讯科技(深圳)有限公司 | 数据处理方法及装置、电子设备、可读介质、产品 |
| JP7642593B2 (ja) | 2022-09-12 | 2025-03-10 | キヤノン株式会社 | 画像処理装置および画像処理方法 |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2723118B2 (ja) * | 1992-08-31 | 1998-03-09 | インターナショナル・ビジネス・マシーンズ・コーポレイション | 2次元オブジェクトの認識に用いるためのニューラル・ネットワーク及び光学式文字認識装置 |
| US5987161A (en) * | 1994-06-30 | 1999-11-16 | Texas Instruments Incorporated | Apparatus and method for identifying defective objects |
| US6658145B1 (en) * | 1997-12-31 | 2003-12-02 | Cognex Corporation | Fast high-accuracy multi-dimensional pattern inspection |
| US6850646B1 (en) * | 1997-12-31 | 2005-02-01 | Cognex Corporation | Fast high-accuracy multi-dimensional pattern inspection |
| JP3698420B2 (ja) * | 2001-06-12 | 2005-09-21 | シャープ株式会社 | 画像監視装置及び画像監視方法及び画像監視処理プログラム |
| JP2004227470A (ja) | 2003-01-27 | 2004-08-12 | Victor Co Of Japan Ltd | 画像変換方法及び画像変換用コンピュータプログラム |
| US7274832B2 (en) * | 2003-11-13 | 2007-09-25 | Eastman Kodak Company | In-plane rotation invariant object detection in digitized images |
| JP2006197034A (ja) * | 2005-01-11 | 2006-07-27 | Sumitomo Electric Ind Ltd | 画像認識システム、撮像装置及び画像認識方法 |
| JP2007025767A (ja) * | 2005-07-12 | 2007-02-01 | Nikon Corp | 画像認識システムと画像認識方法、および画像認識プログラム |
| US7613357B2 (en) * | 2005-09-20 | 2009-11-03 | Gm Global Technology Operations, Inc. | Method for warped image object recognition |
| KR101014572B1 (ko) * | 2007-08-27 | 2011-02-16 | 주식회사 코아로직 | 영상 왜곡 보정 방법 및 그 보정 방법을 채용한 영상처리장치 |
| US8068674B2 (en) * | 2007-09-04 | 2011-11-29 | Evolution Robotics Retail, Inc. | UPC substitution fraud prevention |
| JP4629131B2 (ja) | 2008-09-03 | 2011-02-09 | 大日本印刷株式会社 | 画像変換装置 |
| JP5215097B2 (ja) | 2008-09-12 | 2013-06-19 | 公立大学法人首都大学東京 | 撮像画像の変換方法 |
| JP2010123373A (ja) * | 2008-11-19 | 2010-06-03 | Panasonic Electric Works Co Ltd | 照明システム |
| CN101866425A (zh) * | 2010-06-02 | 2010-10-20 | 北京交通大学 | 基于鱼眼摄像头的人体检测方法 |
| US9007432B2 (en) * | 2010-12-16 | 2015-04-14 | The Massachusetts Institute Of Technology | Imaging systems and methods for immersive surveillance |
-
2011
- 2011-04-26 JP JP2011098347A patent/JP5739722B2/ja active Active
-
2012
- 2012-04-23 EP EP12165121.0A patent/EP2518663A3/en not_active Ceased
- 2012-04-24 US US13/454,689 patent/US20120274782A1/en not_active Abandoned
- 2012-04-26 CN CN201210126760.8A patent/CN102831386B/zh not_active Expired - Fee Related
- 2012-04-26 KR KR1020120043869A patent/KR101374643B1/ko not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| CN102831386A (zh) | 2012-12-19 |
| KR101374643B1 (ko) | 2014-03-14 |
| US20120274782A1 (en) | 2012-11-01 |
| EP2518663A2 (en) | 2012-10-31 |
| JP2012230546A (ja) | 2012-11-22 |
| CN102831386B (zh) | 2015-12-16 |
| EP2518663A3 (en) | 2014-12-31 |
| JP5739722B2 (ja) | 2015-06-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101374643B1 (ko) | 물체 인식 방법 및 인식 장치 | |
| JP6872877B2 (ja) | イメージ生成方法及び装置 | |
| JP2022514912A (ja) | センサのキャリブレーション方法、装置、システム、車両、機器及び記憶媒体 | |
| US20210358157A1 (en) | Three-dimensional measurement system and three-dimensional measurement method | |
| US11122195B2 (en) | Camera parameter estimation device, method, and program | |
| WO2018102990A1 (en) | System and method for rectifying a wide-angle image | |
| JP6739937B2 (ja) | 情報処理装置、情報処理装置の制御方法、及びプログラム | |
| CN114743264B (zh) | 拍摄行为检测方法、装置、设备及存储介质 | |
| WO2016163492A1 (ja) | 位置特定装置、位置特定方法及びプログラム | |
| JP5783567B2 (ja) | 直線検出装置、直線検出方法、直線検出プログラム及び撮影システム | |
| JP5700221B2 (ja) | マーカ判定装置、マーカ判定検出システム、マーカ判定検出装置、マーカ、マーカ判定方法及びそのプログラム | |
| JP5477518B1 (ja) | 画像処理装置、画像処理方法および画像処理プログラム | |
| JP5783569B2 (ja) | 直線検出装置、直線検出方法、直線検出プログラム及び撮影システム | |
| JP5700220B2 (ja) | マーカ生成装置、マーカ生成検出システム、マーカ生成検出装置、マーカ、マーカ生成方法及びそのプログラム | |
| EP3494545B1 (en) | Methods and apparatus for codeword boundary detection for generating depth maps | |
| JP2012008657A (ja) | 物体形状生成装置及び方法 | |
| US11836218B2 (en) | System and method for object detection and dimensioning | |
| JP2018092507A (ja) | 画像処理装置、画像処理方法及びプログラム | |
| KR20220026876A (ko) | 위성 영상 표적 식별 장치, 방법, 컴퓨터 판독 가능한 기록매체 및 컴퓨터 프로그램 | |
| JP7571862B2 (ja) | 画像処理装置、画像処理方法、プログラム | |
| CN113330275B (zh) | 相机信息计算装置、系统、相机信息计算方法及记录介质 | |
| JP4792939B2 (ja) | パターンマッチング方法、パターンマッチング装置 | |
| KR102780432B1 (ko) | 전방위 이미지 처리 방법 및 이를 수행하는 서버 | |
| KR20200064888A (ko) | 다중시점의 영상 교정 방법 및 장치 | |
| Andrade et al. | A robust methodology for outdoor optical mark recognition |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| PA0109 | Patent application |
St.27 status event code: A-0-1-A10-A12-nap-PA0109 |
|
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| E13-X000 | Pre-grant limitation requested |
St.27 status event code: A-2-3-E10-E13-lim-X000 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-3-3-R10-R18-oth-X000 |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U11-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-5-5-R10-R13-asn-PN2301 St.27 status event code: A-5-5-R10-R11-asn-PN2301 |
|
| FPAY | Annual fee payment |
Payment date: 20170116 Year of fee payment: 4 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 4 |
|
| FPAY | Annual fee payment |
Payment date: 20180202 Year of fee payment: 5 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 5 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 6 |
|
| FPAY | Annual fee payment |
Payment date: 20200213 Year of fee payment: 7 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 7 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 8 |
|
| PC1903 | Unpaid annual fee |
St.27 status event code: A-4-4-U10-U13-oth-PC1903 Not in force date: 20220311 Payment event data comment text: Termination Category : DEFAULT_OF_REGISTRATION_FEE |
|
| PC1903 | Unpaid annual fee |
St.27 status event code: N-4-6-H10-H13-oth-PC1903 Ip right cessation event data comment text: Termination Category : DEFAULT_OF_REGISTRATION_FEE Not in force date: 20220311 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |