KR20120136492A - 토크벡터링을 이용한 차선유지보조시스템 및 그 차선유지보조방법 - Google Patents
토크벡터링을 이용한 차선유지보조시스템 및 그 차선유지보조방법 Download PDFInfo
- Publication number
- KR20120136492A KR20120136492A KR1020110055461A KR20110055461A KR20120136492A KR 20120136492 A KR20120136492 A KR 20120136492A KR 1020110055461 A KR1020110055461 A KR 1020110055461A KR 20110055461 A KR20110055461 A KR 20110055461A KR 20120136492 A KR20120136492 A KR 20120136492A
- Authority
- KR
- South Korea
- Prior art keywords
- lane
- vehicle
- control
- torque
- intervention
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
- 238000000034 method Methods 0.000 title claims abstract description 20
- 238000012423 maintenance Methods 0.000 claims abstract description 26
- 238000006073 displacement reaction Methods 0.000 claims abstract description 6
- 238000010586 diagram Methods 0.000 description 9
- 210000002700 urine Anatomy 0.000 description 2
- 230000000694 effects Effects 0.000 description 1
- 230000009545 invasion Effects 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000003449 preventive effect Effects 0.000 description 1
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/10—Path keeping
- B60W30/12—Lane keeping
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/188—Controlling power parameters of the driveline, e.g. determining the required power
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/02—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to ambient conditions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/10—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to vehicle motion
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/10—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to vehicle motion
- B60W40/114—Yaw movement
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D15/00—Steering not otherwise provided for
- B62D15/02—Steering position indicators ; Steering position determination; Steering aids
- B62D15/025—Active steering aids, e.g. helping the driver by actively influencing the steering system after environment evaluation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0457—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such
- B62D5/046—Controlling the motor
- B62D5/0463—Controlling the motor calculating assisting torque from the motor based on driver input
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/167—Driving aids for lane monitoring, lane changing, e.g. blind spot detection
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/12—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to parameters of the vehicle itself, e.g. tyre models
- B60W40/13—Load or weight
- B60W2040/1323—Moment of inertia of the vehicle body
- B60W2040/1346—Moment of inertia of the vehicle body about the yaw axis
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/10—Longitudinal speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/40—Torque distribution
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/18—Steering angle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2720/00—Output or target parameters relating to overall vehicle dynamics
- B60W2720/14—Yaw
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2300/00—Purposes or special features of road vehicle drive control systems
- B60Y2300/10—Path keeping
- B60Y2300/12—Lane keeping
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2400/00—Special features of vehicle units
- B60Y2400/30—Sensors
- B60Y2400/303—Speed sensors
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Automation & Control Theory (AREA)
- Physics & Mathematics (AREA)
- Mathematical Physics (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- General Physics & Mathematics (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
Abstract
Description
도 2a는 본 발명에 따른 차선유지보조시스템을 도시한 구성도.
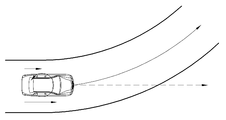
도 2b는 본 발명에 따른 토크벡터링을 이용한 차선유지보조시스템의 제어에 따른 차량의 차선유지 상태를 도시한 상태도.
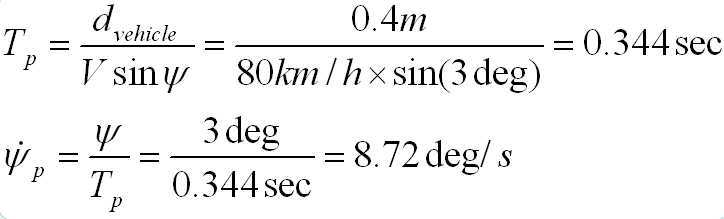
도 3a 내지 도 3b는 본 발명에 따른 차선유지보조시스템의 이탈 위험도를 도시한 개념도.
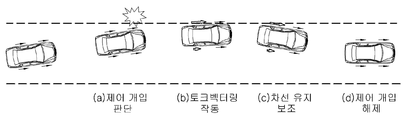
도 4는 본 발명에 따른 차선유지보조시스템의 제어 개입 시점 및 제어 개입 해제 시점을 도시한 개념도.
도 5는 본 발명에 따른 차선유지보조방법을 도시한 블록도.
도 6은 본 발명에 따른 차선유지보조방법의 제어에 의해 차량의 차선유지 상태를 도시한 상태도



300 :제어부 400 :벡터링 구동부
Claims (8)
- 차량의 외부 영상 정보를 입력하는 단계;
차량의 횡변위와 진행 요각을 측정하여 차량의 차선 이탈 정도를 검출하는 단계;
검출된 차선 이탈 정도에 따라 토크벡터링의 토크 배분량을 검출하는 단계;
상기 토크벡터링을 통한 차선제어의 개입 여부를 판단하는 단계; 및
상기 차선제어의 개입이 판단되면 상기 검출된 토크 배분량에 따라 토크벡터링 구동력을 배분하는 단계를 포함하는 것을 특징으로 하는 토크벡터링을 이용한 차선유지보조방법. - 청구항 1에 있어서,
상기 토크벡터링 구동력을 배분하는 단계는, 차량의 선회 외측 바퀴에 구동력을 증가시키고, 차량의 선회 내측 바퀴에 구동력을 감소시키며, 차량이 선회하는 방향으로 요모멘트를 증가시키는 것을 특징으로 하는 토크벡터링을 이용한 차선유지보조방법. - 청구항 1에 있어서,
상기 차선제어의 개입 여부를 판단하는 단계는, 차량의 방향을 지시하기 위한 턴시그널이 작동되지 않은 상태에서 요구 조향각이 일정 값보다 크면, 상기 토크벡터링을 통한 차선제어의 개입이 이루어지는 것으로 판단하는 것을 특징으로 하는 토크벡터링을 이용한 차선유지보조방법. - 청구항 3에 있어서,
상기 차선제어의 개입 여부를 판단하는 단계는, 요구 조향각(δreg)이 17deg 이상인 경우 제어 개입 시작 시점으로 판단하여 차선제어의 개입을 시작하고, 개입 시작후 요구 조향각(δreg)이 14deg 이하인 경우 제어 개입 해제 시점으로 판단하여 차선제어의 개입을 해제하는 것을 특징으로 하는 토크벡터링을 이용한 차선유지보조방법. - 청구항 1에 있어서,
상기 토크 배분량을 검출하는 단계는, 차량의 차선 이탈을 방지하기 위한 요구 요레이트를 연산하고, 상기 차선제어의 개입을 판정하기 위한 요구 조향각을 연산하고, 요구 요레이트로부터 요구 요모멘트를 연산하고, 요구 요모멘트로부터 토크벡터링의 토크 배분량을 연산하는 것을 특징으로 하는 토크벡터링을 이용한 차선유지보조방법. - 차선의 영상 정보를 입력하기 위한 영상 입력부(100);
차량의 조향각, 차속 및 요레이트를 측정하기 위한 센서부(200);
상기 영상 정보와 차량의 횡변위와 진행 요각을 통해 차량의 차선 이탈 정도를 검출하고, 검출된 차선 이탈 정도에 따라 토크벡터링의 토크 배분량을 검출하며, 검출된 토크 배분량에 따라 토크벡터링 구동력을 배분하는 제어부(300); 및
상기 제어부(300)에 따른 토크벡터링 구동력의 배분시, 차량의 선회 외측 바퀴에 구동력을 증가시키고, 차량의 선회 내측 바퀴에 구동력을 감소시키며, 차량이 선회하는 방향으로 요모멘트를 증가시키는 벡터링 구동부(400)를 포함하는 것을 특징으로 하는 토크벡터링을 이용한 차선유지보조시스템. - 청구항 6에 있어서,
상기 제어부(300)는 차량의 방향을 지시하기 위한 턴시그널이 작동되지 않은 상태에서 요구 조향각이 일정 값보다 큰 경우, 상기 토크벡터링을 통한 차선제어에 개입하는 것을 특징으로 하는 토크벡터링을 이용한 차선유지보조시스템. - 청구항 7에 있어서,
상기 제어부(300)는 요구 조향각(δreg)이 17deg 이상인 경우 제어 개입 시작 시점으로 판단하여 차선제어의 개입을 시작하고, 개입 시작후 요구 조향각(δreg)이 14deg 이하인 경우 제어 개입 해제 시점으로 판단하여 차선제어의 개입을 해제하는 것을 특징으로 하는 토크벡터링을 이용한 차선유지보조시스템.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020110055461A KR20120136492A (ko) | 2011-06-09 | 2011-06-09 | 토크벡터링을 이용한 차선유지보조시스템 및 그 차선유지보조방법 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020110055461A KR20120136492A (ko) | 2011-06-09 | 2011-06-09 | 토크벡터링을 이용한 차선유지보조시스템 및 그 차선유지보조방법 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20120136492A true KR20120136492A (ko) | 2012-12-20 |
Family
ID=47903857
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020110055461A Ceased KR20120136492A (ko) | 2011-06-09 | 2011-06-09 | 토크벡터링을 이용한 차선유지보조시스템 및 그 차선유지보조방법 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR20120136492A (ko) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101502510B1 (ko) * | 2013-11-26 | 2015-03-13 | 현대모비스 주식회사 | 차량의 차선 유지 제어 장치 및 방법 |
| KR20180041971A (ko) | 2016-10-17 | 2018-04-25 | 현대자동차주식회사 | 통합샤시 시스템 능동 제어 방법 및 차량 |
| KR101859402B1 (ko) * | 2017-12-14 | 2018-05-18 | 주식회사 딥스 | 터널 내 카메라 간 물체 연계 추적 및 차선 변경 차량 탐지 방법 |
| KR20180068743A (ko) | 2016-12-14 | 2018-06-22 | 현대자동차주식회사 | 가속 선회를 반영한 토크 벡터링 제어 방법 및 차량 |
| JP2018167732A (ja) * | 2017-03-30 | 2018-11-01 | 株式会社Subaru | 車両の走行制御装置 |
| GB2562281A (en) * | 2017-05-11 | 2018-11-14 | Arrival Ltd | Method and apparatus for controlling a vehicle |
| US11772648B2 (en) | 2021-02-26 | 2023-10-03 | R.H. Sheppard Co. Inc. | Lane keep assistance based on rate of departure |
| KR20240108815A (ko) | 2022-12-30 | 2024-07-10 | 현대자동차주식회사 | 차량의 주행 중 횡방향 밀림에 의한 차량 전복 방지 방법 |
-
2011
- 2011-06-09 KR KR1020110055461A patent/KR20120136492A/ko not_active Ceased
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101502510B1 (ko) * | 2013-11-26 | 2015-03-13 | 현대모비스 주식회사 | 차량의 차선 유지 제어 장치 및 방법 |
| US9889848B2 (en) | 2013-11-26 | 2018-02-13 | Hyundai Mobis Co., Ltd. | Apparatus and method for controlling lane keeping of vehicle |
| KR20180041971A (ko) | 2016-10-17 | 2018-04-25 | 현대자동차주식회사 | 통합샤시 시스템 능동 제어 방법 및 차량 |
| KR20180068743A (ko) | 2016-12-14 | 2018-06-22 | 현대자동차주식회사 | 가속 선회를 반영한 토크 벡터링 제어 방법 및 차량 |
| JP2018167732A (ja) * | 2017-03-30 | 2018-11-01 | 株式会社Subaru | 車両の走行制御装置 |
| GB2562281A (en) * | 2017-05-11 | 2018-11-14 | Arrival Ltd | Method and apparatus for controlling a vehicle |
| GB2562281B (en) * | 2017-05-11 | 2022-06-22 | Arrival Ltd | Method and apparatus for controlling a vehicle |
| KR101859402B1 (ko) * | 2017-12-14 | 2018-05-18 | 주식회사 딥스 | 터널 내 카메라 간 물체 연계 추적 및 차선 변경 차량 탐지 방법 |
| US11772648B2 (en) | 2021-02-26 | 2023-10-03 | R.H. Sheppard Co. Inc. | Lane keep assistance based on rate of departure |
| KR20240108815A (ko) | 2022-12-30 | 2024-07-10 | 현대자동차주식회사 | 차량의 주행 중 횡방향 밀림에 의한 차량 전복 방지 방법 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN103183028B (zh) | 用于机动车辆的车道保持方法 | |
| KR20120136492A (ko) | 토크벡터링을 이용한 차선유지보조시스템 및 그 차선유지보조방법 | |
| US11548487B2 (en) | Lane departure prevention system of vehicle | |
| US9610976B2 (en) | Lane departure prevention control system for vehicle | |
| JP6185482B2 (ja) | 車両の走行制御装置 | |
| US9758163B2 (en) | Lane keeping system and lane centering system | |
| KR101675586B1 (ko) | 타이어의 프로파일의 프로파일 깊이를 결정하기 위한 방법, 제어 장치 및 시스템 | |
| US8543292B2 (en) | Lane maintenance control method | |
| US20170057494A1 (en) | Apparatus and method for controlling vehicle | |
| WO2015012291A1 (ja) | 車線維持支援装置 | |
| JP5358978B2 (ja) | 車両用走行制御装置及びその方法 | |
| JP5227082B2 (ja) | 4輪操舵機構を搭載した車両の操舵制御装置 | |
| JP2001247023A (ja) | 車両の運動制御装置 | |
| CN110893851B (zh) | 用于在道路偏离事件中辅助驾驶员的方法和系统 | |
| JP6327701B2 (ja) | 車両の車線逸脱防止制御装置 | |
| JP2013147194A (ja) | 車両の走行軌跡制御装置 | |
| US20160031321A1 (en) | Predicted arrival point presentation device and computer readable medium | |
| JP2014024448A (ja) | 車両の操舵支援装置 | |
| CN112955364A (zh) | 转向控制装置、转向控制方法以及转向控制系统 | |
| JP6068185B2 (ja) | 車両の運転支援装置 | |
| JP6317972B2 (ja) | 車両の車線逸脱防止制御装置 | |
| JP2013082319A (ja) | 車両の走行制御装置 | |
| JP6599706B2 (ja) | 操舵支援制御装置 | |
| JP6338417B2 (ja) | 車両の車線逸脱防止制御装置 | |
| WO2018025902A1 (ja) | 操舵補助装置及び操舵補助方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
Patent event code: PA01091R01D Comment text: Patent Application Patent event date: 20110609 |
|
| PG1501 | Laying open of application | ||
| A201 | Request for examination | ||
| PA0201 | Request for examination |
Patent event code: PA02012R01D Patent event date: 20151106 Comment text: Request for Examination of Application Patent event code: PA02011R01I Patent event date: 20110609 Comment text: Patent Application |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20161109 Patent event code: PE09021S01D |
|
| E601 | Decision to refuse application | ||
| PE0601 | Decision on rejection of patent |
Patent event date: 20170530 Comment text: Decision to Refuse Application Patent event code: PE06012S01D Patent event date: 20161109 Comment text: Notification of reason for refusal Patent event code: PE06011S01I |