KR20130103394A - 방사선 치료시 바이오피드백 원리를 이용한 호흡유도 시스템 - Google Patents
방사선 치료시 바이오피드백 원리를 이용한 호흡유도 시스템 Download PDFInfo
- Publication number
- KR20130103394A KR20130103394A KR1020130024184A KR20130024184A KR20130103394A KR 20130103394 A KR20130103394 A KR 20130103394A KR 1020130024184 A KR1020130024184 A KR 1020130024184A KR 20130024184 A KR20130024184 A KR 20130024184A KR 20130103394 A KR20130103394 A KR 20130103394A
- Authority
- KR
- South Korea
- Prior art keywords
- image
- respiration
- respiration induction
- biofeedback
- radiation therapy
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images

Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/48—Other medical applications
- A61B5/486—Biofeedback
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/08—Measuring devices for evaluating the respiratory organs
- A61B5/0816—Measuring devices for examining respiratory frequency
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B23/00—Exercising apparatus specially adapted for particular parts of the body
- A63B23/18—Exercising apparatus specially adapted for particular parts of the body for improving respiratory function
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2230/00—Measuring physiological parameters of the user
- A63B2230/40—Measuring physiological parameters of the user respiratory characteristics
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Pulmonology (AREA)
- General Health & Medical Sciences (AREA)
- Molecular Biology (AREA)
- Surgery (AREA)
- Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Biophysics (AREA)
- Pathology (AREA)
- Animal Behavior & Ethology (AREA)
- Physics & Mathematics (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Biodiversity & Conservation Biology (AREA)
- Physical Education & Sports Medicine (AREA)
- Physiology (AREA)
- Radiation-Therapy Devices (AREA)
Abstract
본 발명에 따른 방사선 치료시 바이오피드백 원리를 이용한 호흡유도 시스템은 환자의 안정적인 호흡 또는 움직임을 요하는 곳에서 환자 자신의 움직임을 직접 보면서 개개인이 컨트롤할 수 있어 방사선 치료 과정에서의 안정성을 확보할 수 있다.
Description
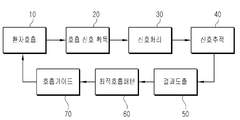
도 2는 개인별 호흡 패턴을 이용하는 바이오 피드백 시스템의 개략도, 및
도 3은 본 발명에 따른 바이오피드백 원리를 이용한 호흡유도 장치에서 수집된 영상을 처리함으로써 호흡유도 시그널과 바이오 피드백 시그널 간의 패턴을 매칭하는 과정을 나타낸 알고리즘이다.
Claims (4)
- 바이오피드백 처리된 호흡유도 시그널 영상을 처리하는 호흡유도 시스템에서,
상기 호흡유도 시그널 영상을 처리하는 공정은,
(a) 방사선 치료를 요하는 환자의 치료 부위에 촬상 장치를 이용하여 상기 치료 부위의 호흡유도 시그널 영상을 획득하는 단계;
(b) 상기 (a) 단계에서 획득된 영상에 대해 임계값을 이용하여 상기 영상 영역을 이진화하는 단계;
(c) 상기 (b) 단계로부터의 이진화된 영상 영역에 대해 왜곡 여부를 판단하는 단계;
(d) 상기 영상을 합성하는 단계;
(e) 상기의 합성된 영상에 대한 영역 분리가 필요한지 여부를 판단하는 단계; 및
(f) 상기 호흡유도 시그널 영상에 패턴 매칭을 수행하는 단계;
를 포함하는 것을 특징으로 하는,
방사선 치료시 바이오피드백 원리를 이용한 호흡유도 시스템.
- 제 1 항에 있어서,
상기 호흡유도 시그널 영상을 처리하는 공정은,
상기 (c) 단계에서, 상기 이진화된 영상 영역에 대해 왜곡이 있는 경우에,
(g) 윤곽선 검출(egde detection)을 실시하는 단계;
를 더 포함하는 것을 특징으로 하는,
방사선 치료시 바이오피드백 원리를 이용한 호흡유도 시스템.
- 제 2 항에 있어서,
상기 (g) 단계에서, 상기 윤곽선 검출에 사용되는 마스크는 Prewitt, Roberts, Sobel, Laplacian, Canny 를 포함하는 그룹 중 어느 하나 이상을 채용하는 것을 특징으로 하는,
방사선 치료시 바이오피드백 원리를 이용한 호흡유도 시스템.
- 제 1 항에 있어서,
상기 호흡유도 시그널 영상을 처리하는 공정은,
상기 (e) 단계에서, 상기의 합성된 영상에 대한 영역 분리가 필요한 경우에,
(h) 상기 호흡유도 시그널 영상에 대해 관심 영역을 설정하는 단계; 및
(i) 상기 설정된 관심 영역에 대한 템플릿 이미지를 지정하는 단계;를 더 포함하는 것을 특징으로 하는,
방사선 치료시 바이오피드백 원리를 이용한 호흡유도 시스템.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US13/790,372 US20130261424A1 (en) | 2012-03-09 | 2013-03-08 | System for Inducing Respiration Using Biofeedback Principle |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020120024643 | 2012-03-09 | ||
| KR20120024643 | 2012-03-09 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20130103394A true KR20130103394A (ko) | 2013-09-23 |
| KR101463681B1 KR101463681B1 (ko) | 2014-11-20 |
Family
ID=49452732
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020130024184A Expired - Fee Related KR101463681B1 (ko) | 2012-03-09 | 2013-03-06 | 방사선 치료시 바이오피드백 원리를 이용한 호흡유도 시스템 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR101463681B1 (ko) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101489093B1 (ko) * | 2013-11-06 | 2015-02-06 | 경희대학교 산학협력단 | 호흡 훈련 장치 및 방법 |
| WO2016064204A1 (ko) * | 2014-10-22 | 2016-04-28 | 사회복지법인 삼성생명공익재단 | 호흡 유도 시스템 및 방법 |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5060476B2 (ja) * | 2005-07-22 | 2012-10-31 | トモセラピー・インコーポレーテッド | 放射線療法を受けている患者の呼吸位相を検出するシステムおよび方法 |
-
2013
- 2013-03-06 KR KR1020130024184A patent/KR101463681B1/ko not_active Expired - Fee Related
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101489093B1 (ko) * | 2013-11-06 | 2015-02-06 | 경희대학교 산학협력단 | 호흡 훈련 장치 및 방법 |
| WO2016064204A1 (ko) * | 2014-10-22 | 2016-04-28 | 사회복지법인 삼성생명공익재단 | 호흡 유도 시스템 및 방법 |
| US10569102B2 (en) | 2014-10-22 | 2020-02-25 | Samsung Life Public Welfare Foundation | System and method for inducing respiration |
Also Published As
| Publication number | Publication date |
|---|---|
| KR101463681B1 (ko) | 2014-11-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101816886B1 (ko) | 호흡 유도 시스템 및 방법 | |
| US11328434B2 (en) | Object tracking device | |
| CN115474951B (zh) | 用于控制对象的医学成像检查的方法、医学成像系统和计算机可读数据存储介质 | |
| CN108078576B (zh) | 医学图像处理的装置、方法、计算机可读程序以及移动对象跟踪装置和放射治疗系统 | |
| US20190343717A1 (en) | Device and method for three-dimensionally mapping acupuncture points | |
| CN107980008B (zh) | 医学图像处理设备、治疗系统和医学图像处理程序 | |
| CN109381212A (zh) | 一种成像控制方法和系统 | |
| CN109999369A (zh) | 医用装置以及医用装置的控制方法 | |
| CN111558174A (zh) | 用于放疗体表光学追踪的定位装置 | |
| EP4176796A1 (en) | Multi-session breathing guidance | |
| WO2017188786A1 (ko) | 호흡 연동 시스템 | |
| Lin et al. | Contactless monitoring of pulse rate and eye movement for uveal melanoma patients undergoing radiation therapy | |
| KR101463681B1 (ko) | 방사선 치료시 바이오피드백 원리를 이용한 호흡유도 시스템 | |
| DE102013219232A1 (de) | Verfahren und Vorrichtung zur Ermittlung einer Atmungsbewegung eines Untersuchungsobjektes | |
| US20130261424A1 (en) | System for Inducing Respiration Using Biofeedback Principle | |
| CN119792830A (zh) | 基于体表追踪和呼吸门控的靶区位置定位调整方法和系统 | |
| JP7279336B2 (ja) | X線撮影装置 | |
| JP7141875B2 (ja) | 放射線治療システム | |
| KR102403650B1 (ko) | 호흡 유도 시스템 | |
| KR102568269B1 (ko) | 관성측정장치 센서 기반의 방사선 치료 중 환자 움직임 모니터링 시스템 | |
| KR101062373B1 (ko) | 배수혈 위치 선정 방법 및 배수혈 표시장치 | |
| KR100919837B1 (ko) | 배수혈 위치 선정 방법 및 배수혈 표시장치 | |
| WO2025182722A1 (ja) | 処理装置、処理プログラム、処理方法及び処理システム | |
| JP6799292B2 (ja) | 放射線撮影装置および放射線画像検出方法 | |
| KR101062374B1 (ko) | 배수혈 위치 선정 방법 및 배수혈 표시장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| PA0109 | Patent application |
St.27 status event code: A-0-1-A10-A12-nap-PA0109 |
|
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| A302 | Request for accelerated examination | ||
| PA0302 | Request for accelerated examination |
St.27 status event code: A-1-2-D10-D16-exm-PA0302 St.27 status event code: A-1-2-D10-D17-exm-PA0302 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| E13-X000 | Pre-grant limitation requested |
St.27 status event code: A-2-3-E10-E13-lim-X000 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| E90F | Notification of reason for final refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
Fee payment year number: 1 St.27 status event code: A-2-2-U10-U11-oth-PR1002 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-5-5-R10-R18-oth-X000 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-5-5-R10-R18-oth-X000 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |
|
| PR1001 | Payment of annual fee |
Fee payment year number: 4 St.27 status event code: A-4-4-U10-U11-oth-PR1001 |
|
| FPAY | Annual fee payment |
Payment date: 20180917 Year of fee payment: 5 |
|
| PR1001 | Payment of annual fee |
Fee payment year number: 5 St.27 status event code: A-4-4-U10-U11-oth-PR1001 |
|
| PC1903 | Unpaid annual fee |
Not in force date: 20191114 Payment event data comment text: Termination Category : DEFAULT_OF_REGISTRATION_FEE St.27 status event code: A-4-4-U10-U13-oth-PC1903 |
|
| PC1903 | Unpaid annual fee |
Ip right cessation event data comment text: Termination Category : DEFAULT_OF_REGISTRATION_FEE Not in force date: 20191114 St.27 status event code: N-4-6-H10-H13-oth-PC1903 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-5-5-R10-R18-oth-X000 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-5-5-R10-R11-asn-PN2301 St.27 status event code: A-5-5-R10-R13-asn-PN2301 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-5-5-R10-R18-oth-X000 |