KR20130136708A - 위치 추정 장치 및 방법 - Google Patents
위치 추정 장치 및 방법 Download PDFInfo
- Publication number
- KR20130136708A KR20130136708A KR1020120060312A KR20120060312A KR20130136708A KR 20130136708 A KR20130136708 A KR 20130136708A KR 1020120060312 A KR1020120060312 A KR 1020120060312A KR 20120060312 A KR20120060312 A KR 20120060312A KR 20130136708 A KR20130136708 A KR 20130136708A
- Authority
- KR
- South Korea
- Prior art keywords
- node
- target node
- information
- location information
- target
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images





Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W24/00—Supervisory, monitoring or testing arrangements
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/02—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using radio waves
- G01S5/12—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using radio waves by co-ordinating position lines of different shape, e.g. hyperbolic, circular, elliptical or radial
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/02—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using radio waves
- G01S5/0284—Relative positioning
- G01S5/0289—Relative positioning of multiple transceivers, e.g. in ad hoc networks
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/02—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using radio waves
- G01S5/04—Position of source determined by a plurality of spaced direction-finders
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/02—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using radio waves
- G01S5/06—Position of source determined by co-ordinating a plurality of position lines defined by path-difference measurements
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/02—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using radio waves
- G01S5/14—Determining absolute distances from a plurality of spaced points of known location
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W64/00—Locating users or terminals or network equipment for network management purposes, e.g. mobility management
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Computer Networks & Wireless Communication (AREA)
- Signal Processing (AREA)
- Mobile Radio Communication Systems (AREA)
Abstract
위치 추정 장치 및 방법이 개시된다. 본 발명에 따른 위치 추정 장치는, 위치 정보를 기준으로 좌표계를 설정하는 설정부, 네트워크를 구성하는 다수의 노드로부터 수신한 노드 간의 연결정보를 기반으로 위치 추정의 대상인 표적 노드를 선정하는 선정부 및 상기 표적 노드와 위치 정보를 알고 있는 기준 노드의 연결관계에 따라 상기 표적 노드의 위치 정보를 추정하는 추정부를 포함한다.
Description
본 발명은 위치 추정 장치 및 방법에 관한 것으로, 더욱 상세하게는 다수의 노드를 포함하는 환경하에서 표적 노드(Target Node)의 위치를 추정하기 위한 위치 추정 장치 및 방법에 관한 것이다.
위치 추정 기술은 교통, 군사, 유통, 물류, 홈 네트워크 등의 환경에서 다양한 서비스 제공을 위한 핵심 기술이며, 위치 추정 기술은 GPS(Global Positioning System) 기반의 위치 추정 기술과 WPAN(Wireless Personal Area Network) 기반의 위치 추정 기술로 분류할 수 있다.
교통, 군사 등의 분야에서 널리 사용되고 있는 GPS 기반의 위치 추정 기술은 넓은 범위를 측정할 수 있는 대신에 터널, 실내 등 시야가 확보되지 않는 지역에서는 위치 추정이 불가능하며 정확도가 낮은 문제점을 가지고 있다. 이러한 문제를 해결하기 위하여, 실내 및 음영지역 내에서 표적 노드(Target Node)의 위치를 추정하기 위한 연구가 활발하게 이루어 지고 있으며, 대표적인 기술로 Wi-Fi(Wireless Fidelity), Zigbee, 블루투스, RFID(Radio Frequency IDentification) 등이 있다. Wi-Fi, Zigbee, 블루투스, RFID를 이용한 위치 인식 기술은 저전력으로 동작하는 기술이지만 낮은 정확도와 이동하는 표적 노드의 궤적을 추적하기 어려운 문제점이 있다.
이러한 문제를 해결하기 위하여, IEEE 802.15.4a 태스킹 그룹(Tasking Group)은 저속의 무선통신을 기본으로 저전력과 높은 정확도로 위치를 추정할 수 있는 새로운 기술 표준을 정하였다. 이 표준은 UWB(Ultra Wide Band) 대역을 사용하는 임펄스 라디오(Impulse Radio, IR) 진영과 ISM(Industrial Scientific Medical) 밴드 주파수 대역을 사용하는 첩 확산 스펙트럼(Chirp Spread Spectrum, CSS) 진영을 선정하였다.
그러나, UWB 기반의 위치 추정 기술과 CSS 기반의 위치 추정 기술은 표적 노드의 위치를 추정하기 위하여 고정된 앵커 노드(Anchor Node)가 필요하므로, 앵커 노드가 없는 환경하에서 표적 노드의 위치를 정확하게 추정할 수 없는 문제점이 있었다.
또한, UWB 기반의 위치 추정 기술과 CSS 기반의 위치 추정 기술은 표적 노드의 위치를 추정하기 위하여 위치 정보를 알고 있는 기준 노드(Reference Node)를 사용하는 데, 표적 노드와 기준 노드에서 사용되는 타이머(클럭)의 차이로 인한 오차가 발생하게 되며, 이러한 오차로 인하여 표적 노드의 위치를 정확하게 추정할 수 없는 문제점이 있었다.
또한, 표적 노드가 이동하는 경우 이동에 따른 오차가 발생하게 되며, 이러한 오차로 인하여 표적 노드의 위치를 정확하게 추정할 수 없는 문제점이 있었다.
한국등록특허 제10-0583401호는 단일 송수신을 통한 근거리 무선측위 시스템 및 방법에 대해 개시하고 있으나, 이 한국등록특허에 개시된 기술은 앵커 노드가 존재하는 하에서 적용될 수 있는 기술에 불과하다.
따라서, 앵커 노드가 없는 환경에서 표적 노드의 위치를 추정하기 위한 새로운 기술의 필요성이 절실하게 대두된다.
본 발명의 목적은 고정된 앵커 노드(Anchor Node)가 없는 환경에서 표적 노드(Target Node)의 위치를 추정하기 위한 위치 추정 장치를 제공하는 것이다.
또한, 본 발명의 목적은 고정된 앵커 노드가 없는 환경에서 표적 노드의 위치를 추정하기 위한 위치 추정 방법을 제공하는 것이다.
상기한 목적을 달성하기 위한 본 발명에 따른 위치 추정 장치의 일 실시예는, 위치 정보를 기준으로 좌표계를 설정하는 설정부, 네트워크를 구성하는 다수의 노드로부터 수신한 노드 간의 연결정보를 기반으로 위치 추정의 대상인 표적 노드를 선정하는 선정부 및 상기 표적 노드와 위치 정보를 알고 있는 기준 노드의 연결관계에 따라 상기 표적 노드의 위치 정보를 추정하는 추정부를 포함한다.
이때, 상기 설정부는, 위치 정보를 기준점으로 하여 좌표계를 설정하고, 좌표계 중 하나의 축에 네트워크를 구성하는 적어도 하나의 노드가 위치하도록 좌표계를 교정하고, 기준점과 상기 적어도 하나의 노드 간의 거리 추정을 통해 상기 적어도 하나의 노드의 위치 정보를 추정할 수 있다.
이때, 상기 선정부는, 네트워크를 구성하는 노드들 중 가장 많은 기준 노드와 연결된 노드를 상기 표적 노드로 선정할 수 있다.
이때, 상기 추정부는, 상기 표적 노드에 연결된 기준 노드의 수가 2개인 경우, 상기 표적 노드와 하나의 기준 노드 간의 거리와 상기 표적 노드와 다른 하나의 기준 노드 간의 거리의 합이, 하나의 기준 노드와 다른 하나의 기준 노드 간의 거리보다 작은 것으로 판단되면, 하나의 기준 노드 위치 정보와 다른 하나의 기준 노드 위치 정보의 중간값을 상기 표적 노드의 위치 정보로 추정할 수 있다.
이때, 상기 추정부는, 상기 표적 노드에 연결된 기준 노드의 수가 3개 이상인 경우, 상기 표적 노드에 연결된 기준 노드들의 위치 정보를 기반으로 상기 표적 노드의 위치 정보를 추정하고, 추정한 표적 노드의 위치 정보와 상기 표적 노드에 연결된 기준 노드들의 위치 정보 차이를 기반으로 잔차 정보를 생성하고, 상기 잔차 정보와 미리 정해진 기준값을 비교한 결과에 따라 상기 표적 노드의 위치를 다시 추정하거나, 추정한 표적 노드의 위치 정보를 최종 위치 정보로 확정할 수 있다.
이때, 상기 추정부는, 상기 잔차 정보가 미리 정해진 기준값 보다 큰 경우, 상기 표적 노드에 연결된 기준 노드들의 위치 정보 중 가장 오래된 위치 정보를 제외한 나머지 위치 정보를 기반으로 상기 표적 노드의 위치 정보를 다시 추정하고, 상기 잔차 정보가 미리 정해진 기준값 보다 작거나 같은 경우, 추정한 표적 노드의 위치 정보를 최종 위치 정보로 확정할 수 있다.
또한, 본 발명의 다른 실시예에 따른 위치 추정 방법은, 임의의 노드의 위치를 기준으로 좌표계를 설정하는 단계, 네트워크를 구성하는 노드들로부터 노드 간의 연결정보를 수신하는 단계, 상기 연결정보를 기반으로 위치 추정의 대상인 표적 노드를 선정하는 단계 및 상기 표적 노드와 위치 정보를 알고 있는 기준 노드의 연결관계에 따라 상기 표적 노드의 위치 정보를 추정하는 단계를 포함한다.
이때, 상기 임의의 노드의 위치를 기준으로 좌표계를 설정하는 단계는, 상기 임의의 노드의 위치를 기준점으로 하여 좌표계를 설정하는 단계, 좌표계 중 하나의 축에 네트워크를 구성하는 적어도 하나의 노드가 위치하도록 좌표계를 교정하는 단계 및 상기 기준점과 상기 적어도 하나의 노드 간의 거리 추정을 통해 상기 적어도 하나의 노드 위치 정보를 추정하는 단계를 포함할 수 있다.
이때, 상기 연결정보를 기반으로 위치 추정의 대상인 표적 노드를 선정하는 단계는, 네트워크를 구성하는 노드들 중 가장 많은 기준 노드와 연결된 노드를 상기 표적 노드로 선정할 수 있다.
이때, 상기 표적 노드와 위치 정보를 알고 있는 기준 노드의 연결관계에 따라 상기 표적 노드의 위치 정보를 추정하는 단계는, 상기 표적 노드에 연결된 기준 노드의 수가 2개인 경우, 상기 표적 노드와 하나의 기준 노드 간의 거리와 상기 표적 노드와 다른 하나의 기준 노드 간의 거리의 합이, 하나의 기준 노드와 다른 하나의 기준 노드 간의 거리보다 작은 것으로 판단되면, 하나의 기준 노드 위치 정보와 다른 하나의 기준 노드 위치 정보의 중간값을 상기 표적 노드의 위치 정보로 추정할 수 있다.
이때, 상기 표적 노드와 위치 정보를 알고 있는 기준 노드의 연결관계에 따라 상기 표적 노드의 위치 정보를 추정하는 단계는, 상기 표적 노드에 연결된 기준 노드의 수가 3개 이상인 경우, 상기 표적 노드에 연결된 기준 노드들의 위치 정보를 기반으로 상기 표적 노드의 위치 정보를 추정하는 단계, 추정한 표적 노드의 위치 정보와 상기 표적 노드에 연결된 기준 노드들의 위치 정보 차이를 기반으로 잔차 정보를 생성하는 단계 및 상기 잔차 정보와 미리 정해진 기준값을 비교한 결과에 따라 상기 표적 노드의 위치 정보를 다시 추정하거나, 추정한 표적 노드의 위치 정보를 최종 위치 정보로 확정하는 단계를 포함할 수 있다.
이때, 상기 잔차 정보와 미리 정해진 기준값을 비교한 결과에 따라 상기 표적 노드의 위치 정보를 다시 추정하거나, 추정한 표적 노드의 위치 정보를 최종 위치 정보로 확정하는 단계는, 상기 잔차 정보가 미리 정해진 기준값 보다 큰 경우, 상기 표적 노드에 연결된 기준 노드들의 위치 정보 중 가장 오래된 위치 정보를 제외한 나머지 위치 정보를 기반으로 상기 표적 노드의 위치 정보를 다시 추정하는 단계 및 상기 잔차 정보가 미리 정해진 기준값 보다 작거나 같은 경우, 추정한 표적 노드의 위치 정보를 최종 위치 정보로 확정하는 단계를 포함할 수 있다.
본 발명에 따르면, 다수의 노드를 포함하는 네트워크 환경에서 표적 노드(Target Node)의 위치를 추정함에 있어서, 고정된 앵커 노드(Anchor Node)가 없는 경우에도 표적 노드의 위치를 정확하게 추정할 수 있다.
또한, 본 발명은 표적 노드와 기준 노드(Reference Node)에서 사용되는 타이머(클럭)의 차이로 인한 오차를 보정할 수 있으므로, 표적 노드의 위치를 보다 정확하게 추정할 수 있다.
또한, 본 발명은 표적 노드의 이동에 따른 오차를 보정할 수 있으므로, 표적 노드의 위치를 더욱 정확하게 추정할 수 있다.
도 1은 본 발명의 일 실시예에 따른 위치 추정 장치를 나타낸 블록도이다.
도 2는 본 발명의 일 실시예에 따른 좌표계를 나타낸 개념도이다.
도 3은 네트워크를 구성하는 기준 노드의 분포를 나타낸 개념도이다.
도 4는 네트워크를 구성하는 기준 노드와 표적 노드의 분포를 나타낸 개념도이다.
도 5는 본 발명의 일 실시예에 따른 위치 추정 방법을 나타낸 동작 흐름도이다.
도 6은 도 5에 도시된 표적 노드의 위치 정보 추정 단계를 상세히 나타낸 동작 흐름도이다.
도 2는 본 발명의 일 실시예에 따른 좌표계를 나타낸 개념도이다.
도 3은 네트워크를 구성하는 기준 노드의 분포를 나타낸 개념도이다.
도 4는 네트워크를 구성하는 기준 노드와 표적 노드의 분포를 나타낸 개념도이다.
도 5는 본 발명의 일 실시예에 따른 위치 추정 방법을 나타낸 동작 흐름도이다.
도 6은 도 5에 도시된 표적 노드의 위치 정보 추정 단계를 상세히 나타낸 동작 흐름도이다.
본 발명을 첨부된 도면을 참조하여 상세히 설명하면 다음과 같다. 여기서, 반복되는 설명, 본 발명의 요지를 불필요하게 흐릴 수 있는 공지 기능, 및 구성에 대한 상세한 설명은 생략한다. 본 발명의 실시형태는 당 업계에서 평균적인 지식을 가진 자에게 본 발명을 보다 완전하게 설명하기 위해서 제공되는 것이다. 따라서, 도면에서의 요소들의 형상 및 크기 등은 보다 명확한 설명을 위해 과장될 수 있다.
이하, 본 발명에 따른 바람직한 실시예를 첨부된 도면을 참조하여 상세하게 설명한다.
명세서 전체에서, '네트워크'는 통신이 가능한 다수의 노드(Node)로 구성될 수 있다. '기준 노드(Reference Node)'는 다른 노드와 통신을 할 수 있고, 자신의 위치 정보를 알고 있으며 위치 추정이 필요한 표적 노드(Target Node)에 대한 거리 측정 기능을 수행할 수 있다. '표적 노드'는 다른 노드와 통신을 할 수 있고, 자신의 위치 정보를 모르고 있으며 기준 노드에 대한 거리 측정 기능을 수행할 수 있다. '위치 정보'는 좌표계에 위치한 노드의 좌표 정보 및 다른 노드까지의 거리 정보를 포함할 수 있다.
도 1은 본 발명의 일 실시예에 따른 위치 추정 장치를 나타낸 블록도이다.
도 1을 참조하면, 본 발명의 일 실시예에 따른 위치 추정 장치(10)는 설정부(11), 선정부(12) 및 추정부(23)를 포함한다. 여기서, 위치 추정 장치(10)는 네트워크를 구성하는 노드 중 임의의 노드를 의미할 수 있다.
설정부(11)는 위치 정보를 기준으로 좌표계를 설정할 수 있으며, 이때 위치 정보로 자신의 위치 정보, 즉 위치 추정 장치(10)의 위치를 사용할 수 있다. 설정부(11)는 위치 추정 장치(10)의 위치를 기준점으로 하여 2차원 좌표계를 설정하거나, 3차원 좌표계를 설정할 수 있다. 여기서, 2차원 좌표계는 x축, y축으로 구성될 수 있으며, x축과 y축은 서로 수직하도록 위치할 수 있다. 또한, 2차원 좌표계에 위치하는 노드의 위치는 (x, y)로 표현할 수 있다. 3차원 좌표계는 x축, y축, z축으로 구성될 수 있으며, x축, y축, z축은 서로 수직하도록 위치할 수 있다. 또한, 3차원 좌표계에 위치하는 노드의 위치는 (x, y, z)로 표현할 수 있다.
2차원 좌표계를 설정하는 경우, 설정부(11)는 기준점인 위치 추정 장치(10)의 위치를 (0, 0)으로 하여 2차원 좌표계를 설정할 수 있고, 기준점인 위치 추정 장치(10)의 위치를 (0.001, 0.001)으로 하여 2차원 좌표계를 설정할 수 있다. 3차원 좌표계를 설정하는 경우, 설정부(11)는 기준점인 위치 추정 장치(10)의 위치를 (0, 0, 0)으로 하여 3차원 좌표계를 설정할 수 있고, 기준점인 위치 추정 장치(10)의 위치를 (0.001, 0.001, 0.001)으로 하여 3차원 좌표계를 설정할 수 있다. 즉, 좌표계의 설정시에 기준점이 되는 위치 추정 장치(10)의 좌표는 사용자의 설정에 따라 달라진다. 여기서, 좌표계의 단위로 'm'을 사용할 수 있으며, 좌표 (0.001. 0.001)은 x축으로 0.001m, y축으로 0.001m의 위치에 노드가 위치함을 의미할 수 있다.
좌표계를 설정한 후, 설정부(11)는 좌표계 중 하나의 축에 네트워크를 구성하는 적어도 하나의 노드가 위치하도록 좌표계를 교정할 수 있다. 예를 들어, 설정부(11)가 2차원 좌표계를 설정한 경우, 적어도 하나의 노드가 x축에 위치하도록 좌표계를 교정할 수 있고, 적어도 하나의 노드가 y축에 위치하도록 좌표계를 교정할 수 있다. 이때, 좌표계 중 하나의 축에 위치하는 노드는 위치 추정 장치(10)의 범위 내에 위치하는 노드, 즉 위치 추정 장치(10)와 통신이 가능한 범위 내에 위치한 노드이다. 여기서, 위치 추정 장치(10)와 통신이 가능한 범위 내에 위치한 노드는, 통신을 통해 위치 추정 장치(10)에 연결(또는, 접속)될 수 있는 노드를 의미한다.
좌표계 중 하나의 축에 적어도 하나의 노드가 위치하도록 좌표계를 교정한 후, 설정부(11)는 좌표계 중 하나의 축에 위치한 노드의 위치 정보를 추정할 수 있다. 설정부(11)는 좌표계 중 하나의 축에 위치한 노드와 통신을 하여 위치 추정 장치(11)로부터 노드까지의 거리를 추정할 수 있고, 추정한 거리를 이용하여 좌표계 중 하나의 축에 위치한 노드의 위치 정보를 추정할 수 있다. 이때, 설정부(11)는 도래시간(Time Of Arrival, TOA), 도래시간차(Time Difference Of Arrival, TDOA), 양방향 거리측정(Two-Way Ranging) 방법 등을 사용하여, 위치 추정 장치(10)로부터 좌표계 중 하나의 축에 위치한 노드까지의 거리를 추정할 수 있다.

수학식 1에서, 'PBT'는 좌표계 중 하나의 축에 위치한 노드의 위치 정보이고, 'ρM- BT'는 위치 추정 장치(10)로부터 좌표계 중 하나의 축에 위치한 노드까지의 거리이고, '0.001'은 위치 추정 장치(10)의 y축 좌표이다. 즉, 수학식 1을 통해 x축에 위치한 노드의 위치 정보를 추정할 수 있다.
도 2는 본 발명의 일 실시예에 따른 좌표계를 나타낸 개념도이다.
도 2를 참조하면, 2차원 좌표계에 다수의 노드(10, 20)가 위치하고 있으며, 다수의 노드 중 임의의 노드를 위치 추정 장치(10)로 볼 수 있으며, 점선으로 연결된 노드들은 서로 연결된 것으로 볼 수 있다. 즉, 특정 노드와 점선으로 연결된 노드는, 특정 노드와 통신 가능한 범위 내에 위치하고 있는 것으로 볼 수 있다. 여기서, 위치 추정 장치(10)는 2차원 좌표계의 기준점에 위치하고, x축에 하나의 노드(20)가 위치하고 있다. 이때, 위치 추정 장치(10)의 위치는 (0, 0)이거나, (0.001, 0.001)이다.
선정부(12)는 네트워크를 구성하는 다수의 노드들로부터 수신한 노드 간의 연결정보를 기반으로 위치 추정의 대상인 표적 노드를 선정할 수 있다. 여기서, 노드 간의 연결정보란, 특정 노드와 통신이 가능한 범위 내에 위치한 노드의 수 및 통신이 가능한 범위 내에 위치한 노드의 특성 정보를 포함한다. 노드의 특성 정보는 자신의 위치를 알고 있는 기준 노드에 해당하는지 자신의 위치를 모르고 있는 노드에 해당하는지를 나타내는 정보를 의미한다.
선정부(12)는 연결정보를 기반으로 네트워크를 구성하는 노드의 통신 범위 내에 위치하는 기준 노드의 수를 측정하고, 가장 많은 기준 노드가 위치하는 통신 범위를 가지는 노드를 표적 노드로 선정할 수 있다.
여기서, 선정부(12)는 네트워크를 구성하는 다수의 노드들로부터 주기적 또는 비주기적으로 수신한 연결정보를 기반으로, 특정 노드와 통신이 가능한 범위 내에 위치한 노드의 수 및 통신이 가능한 범위 내에 위치한 노드의 특성 정보를 지속적으로 갱신할 수 있다.
추정부(13)는 표적 노드와 기준 노드의 연결관계에 따라 표적 노드의 위치 정보를 추정할 수 있다. 즉, 추정부(13)는 표적 노드의 통신 범위 내에 위치하는 기준 노드의 수에 따라 서로 다른 방법을 적용하여 표적 노드의 위치 정보를 추정할 수 있다.
표적 노드의 통신 범위 내에 위치하는 기준 노드가 2개인 경우(즉, 표적 노드에 연결된 기준 노드의 수가 2개인 경우), 추정부(13)는, 표적 노드와 하나의 기준 노드 간의 거리와 표적 노드와 다른 하나의 기준 노드 간의 거리의 합과, 하나의 기준 노드와 다른 하나의 기준 노드 간의 거리를 비교한 결과를 기반으로 표적 노드의 위치 정보를 추정할 수 있다.
도 3은 네트워크를 구성하는 기준 노드의 분포를 나타낸 개념도이다.
도 3을 참조하여, 표적 노드의 통신 범위 내에 위치하는 기준 노드가 2개인 경우에 표적 노드의 위치 정보를 추정하는 방법에 대해 상세하게 설명한다.
표적 노드의 통신 범위 내에 위치하는 기준 노드(21, 22)가 2개인 경우, 2개의 기준 노드(21, 22)는 표적 노드와 통신을 하여 표적 노드까지 거리를 추정할 수고, 하나의 기준 노드(21)와 다른 하나의 기준 노드(22)는 통신을 통해 서로 간의 거리를 추정할 수 있다. 'P1'은 하나의 기준 노드(21)에서 추정한 표적 노드까지 거리이고, 'P2'는 다른 하나의 기준 노드(22)에서 추정한 표적 노드까지 거리이고, 'L'은 하나의 기준 노드(21)에서 다른 하나의 기준 노드(22)까지의 거리이다.
일반적으로, 표적 노드의 통신 범위 내에 위치하는 기준 노드(21, 22)가 2개인 경우, 'P1'을 반경으로 하는 가상 원과 'P2'를 반경으로 하는 가상 원은, 적어도 하나의 위치에서 만나게 된다. 이때, 'P1'을 반경으로 하는 가상의 원과 'P2'를 반경으로 하는 가상의 원이 하나의 위치에서 만나는 경우, 그 위치를 해당 표적 노드의 위치 정보로 추정할 수 있다. 'P1'을 반경으로 하는 가상의 원과 'P2'를 반경으로 하는 가상의 원이 두 개의 위치에서 만나는 경우, 두 개의 위치 중 하나의 위치를 해당 표적 노드의 위치 정보로 추정할 수 있다. 여기서, 두 개의 위치 중 하나의 위치를 해당 표적 노드의 위치 정보로 추정하는 경우, 다른 노드들의 연결정보를 기반으로 표적 노드의 위치 정보로 추정할 수 있다.
한편, 표적 노드의 통신 범위 내에 2개의 기준 노드(20)가 위치하나, 'P1'을 반경으로 하는 가상 원과 'P2'를 반경으로 하는 가상 원이 만나는 위치가 존재하지 않는 경우(L > P1+ P2)가 발생할 수 있다. 이러한 경우는 노드 간의 타이머(클럭) 오차에 의해 발생할 수 있다. 'L'이 'P1+ P2'보다 큰 경우, 추정부(13)는 하나의 기준 노드(21)의 위치 정보와 다른 하나의 기준 노드(22)의 위치 정보 중간값을 표적 노드의 위치 정보로 추정할 수 있다.

수학식 2에서, 'PTR'은 표적 노드의 위치 정보이고, 'PNR1'은 하나의 기준 노드(21)의 위치 정보이고, 'PNR2'은 다른 하나의 기준 노드(22)의 위치 정보이다. 즉, 수학식 2를 통해, 'P1'을 반경으로 하는 가상 원과 'P2'를 반경으로 하는 가상 원이 만나는 위치가 존재하지 않는 경우에도 표적 노드의 위치 정보를 추정할 수 있다.
표적 노드의 통신 범위 내에 위치하는 기준 노드가 3개 이상인 경우(즉, 표적 노드에 연결된 기준 노드의 수가 3개인 연결된 경우), 추정부(13)는, 표적 노드의 통신 범위 내에 위치하는 기준 노드들의 위치 정보를 기반으로 표적 노드의 위치 정보를 추정할 수 있다. 이때, 추정부(13)는 삼각측량법을 사용하여 표적 노드의 위치 정보를 추정할 수 있다. 여기서, 추정된 표적 노드의 위치 정보는 최종 위치 정보가 아니라, 최종 위치 정보의 후보 중의 하나이다.
표적 노드의 위치 정보를 추정한 후, 추정부(13)는 추정한 표적 노드의 위치 정보와 표적 노드의 통신 범위 내에 위치하는 기준 노드들의 위치 정보 차이를 기반으로 잔차 정보를 생성할 수 있다.

수학식 3에서, 'R'은 잔차 정보이고, 'n'은 표적 노드의 통신 범위 내에 위치한 기준 노드의 수이고, 'xi, yi'는 'i'번째 기준 노드의 위치 정보이고, 'xT, yT'는 추정부(13)가 추정한 표적 노드의 위치 정보이고, 'ρi'는 'i'번째 기준 노드로부터 표적 노드까지 거리이다. 수학식 3을 통해 표적 노드의 위치 정보와 표적 노드의 통신 범위 내에 위치하는 기준 노드들의 위치 정보 차이인 잔차 정보를 생성할 수 있다.
추정부(13)는 잔차 정보와 미리 정해진 기준값을 비교한 결과에 따라 표적 노드의 위치 정보를 다시 추정하거나, 추정한 표적 노드의 위치 정보를 최종 위치 정보로 확정할 수 있다. 여기서, 기준값은, 추정부(13)에서 추정한 표적 노드의 위치 정보가 정확하게 추정되었는지를 판단하는 기준이 되는 값으로, 잔차 정보가 기준값보다 작거나 같은 경우에 표적 노드의 위치 정보가 정확하게 추정된 것으로 판단할 수 있고, 잔차 정보가 기준값보다 큰 경우에 표적 노드의 위치 정보가 정확하게 추정되지 않은 것으로 판단할 수 있다. 즉, 표적 노드가 이동함에 따라 표적 노드의 통신 범위 내에 위치하는 기준 노드의 개수가 변하게 되는데, 이러한 정보가 갱신되지 않은 경우에 잔차 정보가 기준값보다 커질 수 있다.
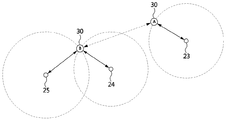
도 4는 네트워크를 구성하는 기준 노드와 표적 노드의 분포를 나타낸 개념도이다.
도 4를 참조하여, 잔차 정보가 기준값보다 커지는 경우에 대하여 상세하게 설명한다. 표적 노드(30)는 'A'에서 'B'로 이동을 하며, 표적 노드(30)가'A'에 위치하는 경우에 기준 노드(23)의 통신 범위 내에 표적 노드(30)가 위치하게 되므로, 기준 노드(23)는 표적 노드(30)까지의 거리 정보를 추정하고, 이를 위치 추정 장치(10, 도 1참조)에 제공한다.
그 후, 표적 노드(30)가 'B'로 이동하는 경우에 기준 노드(24, 25)의 통신 범위 내에 표적 노드(30)가 위치하게 되므로, 기준 노드(24, 25)는 표적 노드(30)까지의 거리 정보를 추정하고, 이를 위치 추정 장치(10)에 제공한다. 이때, 'A'에 위치하던 표적 노드(30)가 'B'로 이동하였으므로, 기준 노드(23)는 자신의 통신 범위 내에 표적 노드(30)가 위치 하지 않음을 위치 추정 장치(10)에 알려야 하나, 이를 알리지 않거나 알리지 못한 경우에 위치 추정 장치(10)의 입장에서는 표적 노드(30)가 기준 노드(23, 24, 25)의 통신 범위 내에 위치하는 것으로 인식하게 된다.
이 경우, 위치 추정 장치(10)는 기준 노드(24, 25)의 위치 정보만을 이용하여 표적 노드의 위치 정보를 추정하여야 하나, 기준 노드(23, 24, 25)의 위치 정보를 이용하여 표적 노드의 위치 정보를 추정하므로, 표적 노드의 위치 정보를 정확하게 추정할 수 없게 된다. 결국, 상술한 경우에서 생성된 잔차 정보는 기준값보다 큰 값을 가질 것이다.
잔차 정보와 기준값을 비교한 결과, 잔차 정보가 기준값보다 작거나 같은 것으로 판단된 경우, 추정부(13)는 기준 노드들의 위치 정보를 기반으로 추정한 표적 노드의 위치 정보를 최종 위치 정보로 확정할 수 있다.
잔차 정보와 기준값을 비교한 결과, 잔차 정보가 기준값보다 큰 것으로 판단된 경우(즉, 상술한 도 4의 경우), 표적 노드의 통신 범위 내에 위치한 기준 노드들 중에서 가장 오래된 위치 정보를 가지는 기준 노드를 제외하고, 나머지 기준 노드들의 위치 정보를 가지고 표적 노드의 위치 정보를 다시 추정할 수 있다.
이때, 가장 오래된 위치 정보를 가지는 기준 노드를 제외한 결과 2개의 기준 노드가 남는 경우, 상술한 방법인 2개의 기준 노드의 위치 정보를 사용하여 표적 노드의 위치 정보를 추정하는 방법을 통해 표적 노드의 위치 정보를 추정할 수 있다. 한편, 가장 오래된 위치 정보를 가지는 기준 노드를 제외한 결과 3개 이상의 기준 노드가 남는 경우, 상술한 방법인 3개 이상의 기준 노드의 위치 정보를 사용하여 표적 노드의 위치 정보를 추정하는 방법을 통해 표적 노드의 위치 정보를 추정할 수 있다.
본 발명에서 설정부(11), 선정부(12) 및 추정부(13)는 서로 독립된 부분으로서 개시되지만, 설정부(11), 선정부(12) 및 추정부(13)는 하나의 단일한 형태, 하나의 물리적인 장치 또는 하나의 모듈로 구현될 수 있다. 이뿐만 아니라, 설정부(11), 선정부(12) 및 추정부(13)는 각각 하나의 물리적인 장치 또는 집단이 아닌 복수의 물리적 장치 또는 집단으로 구현될 수 있다.
이상 본 발명의 일 실시예에 따른 위치 추정 장치에 대해 상세하게 설명하였다. 이하 본 발명의 일 실시예에 따른 위치 추정 방법에 대해 상세하게 설명한다.
도 5는 본 발명의 일 실시예에 따른 위치 추정 방법을 나타낸 동작 흐름도이다.
도 5를 참조하면, 위치 추정 방법은, 임의의 노드의 위치를 기준으로 좌표계를 설정하는 단계(S100), 네트워크를 구성하는 노드들로부터 노드 간의 연결정보를 수신하는 단계(S200), 연결정보를 기반으로 위치 추정의 대상인 표적 노드를 선정하는 단계(S300) 및 표적 노드와 위치 정보를 알고 있는 기준 노드의 연결관계에 따라 상기 표적 노드의 위치 정보를 추정하는 단계(S400)를 포함한다. 여기서, 위치 추정 방법은 위치 추정 장치(10, 도 1참조)에서 수행될 수 있으며, 위치 추정 장치는 네트워크를 구성하는 노드 중 임의의 노드일 수 있다.
위치 추정 장치는 자신의 위치 정보를 기준으로 좌표계를 설정할 수 있다(S110). 이때, 위치 추정 장치는 자신의 위치를 기준점으로 하여 2차원 좌표계를 설정하거나, 3차원 좌표계를 설정할 수 있다. 여기서, 2차원 좌표계는 x축, y축으로 구성될 수 있으며, x축과 y축은 서로 수직하도록 위치할 수 있다. 또한, 2차원 좌표계에 위치하는 노드의 위치는 (x, y)로 표현할 수 있다. 3차원 좌표계는 x축, y축, z축으로 구성될 수 있으며, x축, y축, z축은 서로 수직하도록 위치할 수 있다. 또한, 3차원 좌표계에 위치하는 노드의 위치는 (x, y, z)로 표현할 수 있다.
2차원 좌표계를 설정하는 경우, 위치 추정 장치는 자신의 위치를 (0, 0)으로 하여 2차원 좌표계를 설정할 수 있고, 자신의 위치를 (0.001, 0.001)으로 하여 2차원 좌표계를 설정할 수 있다. 3차원 좌표계를 설정하는 경우, 위치 추정 장치는 자신의 위치를 (0, 0, 0)으로 하여 3차원 좌표계를 설정할 수 있고, 자신의 위치를 (0.001, 0.001, 0.001)으로 하여 3차원 좌표계를 설정할 수 있다. 즉, 좌표계의 설정시에 기준점이 되는 위치 추정 장치의 좌표는 사용자의 설정에 따라 달라진다. 여기서, 좌표계의 단위로 'm'를 사용할 수 있으며, 좌표 (0.001. 0.001)은 x축으로 0.001m, y축으로 0.001m의 위치에 노드가 위치함을 의미할 수 있다.
좌표계를 설정한 후, 위치 추정 장치는 좌표계 중 하나의 축에 네트워크를 구성하는 적어도 하나의 노드가 위치하도록 좌표계를 교정할 수 있다(S120). 예를 들어, 위치 추정 장치가 2차원 좌표계를 설정한 경우, 적어도 하나의 노드가 x축에 위치하도록 좌표계를 교정할 수 있고, 적어도 하나의 노드가 y축에 위치하도록 좌표계를 교정할 수 있다. 이때, 좌표계 중 하나의 축에 위치하는 노드는 위치 추정 장치의 범위 내에 위치하는 노드, 즉 위치 추정 장치와 통신이 가능한 범위 내에 위치한 노드이다.
좌표계 중 하나의 축에 적어도 하나의 노드가 위치하도록 좌표계를 교정한 후, 위치 추정 장치는 좌표계 중 하나의 축에 위치한 노드의 위치 정보를 추정할 수 있다(S130). 위치 추정 장치는 좌표계 중 하나의 축에 위치한 노드와 통신을 하여 노드까지의 거리를 추정할 수 있고, 추정한 거리를 이용하여 좌표계 중 하나의 축에 위치한 노드의 위치 정보를 추정할 수 있다. 이때, 위치 추정 장치는 도래시간(Time Of Arrival, TOA), 도래시간차(Time Difference Of Arrival, TDOA), 양방향 거리측정(Two-Way Ranging) 방법 등을 사용하여, 위치 추정 장치로부터 좌표계 중 하나의 축에 위치한 노드까지의 거리를 추정할 수 있다. 이때, 위치 추정 장치는 상술한 수학식 1을 통해 노드의 위치 정보를 추정할 수 있다. 여기서, 'PBT'는 좌표계 중 하나의 축에 위치한 노드의 위치 정보이고, 'ρM- BT'는 위치 추정 장치로부터 좌표계 중 하나의 축에 위치한 노드까지의 거리이고, '0.001'은 위치 추정 장치의 y축 좌표이다.
위치 추정 장치는 네트워크를 구성하는 노드 간의 연결정보를 노드들로부터 수신할 수 있다(S200). 위치 추정 장치는, 단계 S100을 수행한 후 단계 S200을 수행할 수 있고, 단계 S100을 수행하기 전에 단계 S200을 수행할 수도 있다. 여기서, 노드 간의 연결정보란, 특정 노드와 통신이 가능한 범위 내에 위치한 노드의 수 및 통신이 가능한 범위 내에 위치한 노드의 특성 정보를 포함한다. 노드의 특성 정보는 자신의 위치를 알고 있는 기준 노드에 해당하는지 자신의 위치를 모르고 있는 노드에 해당하는지를 나타내는 정보이다. 위치 추정 장치는 주기적 또는 비주기적으로 노드 간의 연결정보를 수신하여, 특정 노드와 통신이 가능한 범위 내에 위치한 노드의 수 및 통신이 가능한 범위 내에 위치한 노드의 특성 정보를 갱신할 수 있다.
노드 간의 연결정보를 수신한 후, 위치 추정 장치는 노드 간의 연결정보를 기반으로 위치 추정의 대상인 표적 노드를 선정할 수 있다(S300). 위치 추정 장치는 연결정보를 기반으로 네트워크를 구성하는 노드의 통신 범위 내에 위치하는 기준 노드의 수를 측정(즉, 노드에 연결(접속)된 기준 노드의 수를 측정)하고, 가장 많은 기준 노드가 위치하는 통신 범위를 가지는 노드를 표적 노드로 선정할 수 있다.
연결정보를 기반으로 표적 노드를 선정한 후, 위치 추정 장치는 표적 노드의 위치 정보를 추정할 수 있다(S400).
도 6은 도 5에 도시된 표적 노드의 위치 정보 추정 단계를 상세히 나타낸 동작 흐름도이다.
도 6을 참조하면, 위치 추정 장치는 표적 노드의 통신 범위 내에 위치하는 기준 노드의 수에 따라 표적 노드의 위치 정보를 추정할 수 있다.
표적 노드의 통신 범위 내에 2개의 기준 노드가 위치(즉, 표적 노드에 연결된 기준 노드의 수가 2개인 경우)하는 것으로 판단되면, 위치 추정 장치는 'L'(하나의 기준 노드(21)와 다른 하나의 기준 노드(22) 간의 거리, 도 3 참조)와 'P1 + P2'('P1'은 하나의 기준 노드(21)에서 추정한 표적 노드까지 거리, 'P2'는 다른 하나의 기준 노드(22)에서 추정한 표적 노드까지 거리, 도 3참조)의 크기를 비교한 결과에 따라 표적 노드의 위치 정보를 추정할 수 있다.
예를 들어, 'L = P1+ P2' 인 경우('P1'을 반경으로 하는 가상 원과 'P2'를 반경으로 하는 가상 원이 하나의 위치에서 만나는 경우), 위치 추정 장치는 'P1'을 반경으로 하는 가상 원과 'P2'를 반경으로 하는 가상 원이 만나는 위치를 표적 노드의 위치 정보로 추정할 수 있다(S410).
'L < P1+ P2'인 경우('P1'을 반경으로 하는 가상 원과 'P2'를 반경으로 하는 가상 원이 두 개의 위치에서 만나는 경우), 위치 추정 장치는 'P1'을 반경으로 하는 가상 원과 'P2'를 반경으로 하는 가상 원이 만나는 위치 중 하나의 위치를 표적 노드의 위치 정보로 추정할 수 있다(S410). 이때, 두 개의 위치 중 하나의 위치를 해당 표적 노드의 위치 정보로 추정하는 경우, 위치 추정 장치는 다른 노드들의 연결정보를 기반으로 표적 노드의 위치 정보를 추정할 수 있다.
'L > P1+ P2'인 경우('P1'을 반경으로 하는 가상 원과 'P2'를 반경으로 하는 가상 원이 만나지 않는 경우), 위치 추정 장치는 하나의 기준 노드의 위치 정보와 다른 하나의 기준 노드의 위치 정보 중간값을 표적 노드의 위치 정보로 추정할 수 있다(S420). 이때, 위치 추정 장치는 상술한 수학식 2를 통해 표적 노드의 위치 정보를 추정할 수 있다. 여기서, 'PTR'은 표적 노드의 위치 정보이고, 'PNR1'은 하나의 기준 노드의 위치 정보이고, 'PNR2'은 다른 하나의 기준 노드의 위치 정보이다.
표적 노드의 통신 범위 내에 3개 이상의 기준 노드가 위치(표적 노드에 연결된 기준 노드의 개수가 3인 경우)하는 것으로 판단되면, 위치 추정 장치는 표적 노드의 통신 범위 내에 위치하는 기준 노드들의 위치 정보를 기반으로 표적 노드의 위치 정보를 추정할 수 있다(S430). 이때, 위치 추정 장치는 삼각측량법을 사용하여 표적 노드의 위치 정보를 추정할 수 있다. 여기서, 단계 S430을 통해 추정된 표적 노드의 위치 정보는 최종 위치 정보가 아니라, 최종 위치 정보의 후보 중의 하나이다.
표적 노드의 위치 정보를 추정한 후, 위치 추정 장치는 추정한 표적 노드의 위치 정보와 표적 노드의 통신 범위 내에 위치하는 기준 노드들의 위치 정보 차이를 기반으로 잔차 정보를 생성할 수 있다(S440). 이때, 위치 추정 장치는 상술한 수학식 3을 통해 잔차 정보를 생성할 수 있다. 여기서, 'R'은 잔차 정보이고, 'n'은 표적 노드의 통신 범위 내에 위치한 기준 노드의 수이고, 'xi, yi'는 'i'번째 기준 노드의 위치 정보이고, 'xT, yT'는 위치 추정 장치가 추정한 표적 노드의 위치 정보이고, 'ρi'는 'i'번째 기준 노드로부터 표적 노드까지 거리이다.
잔차 정보를 생성한 후, 위치 추정 장치는 잔차 정보와 미리 정해진 기준값을 비교한 결과에 따라 표적 노드의 위치를 다시 추정하거나, 추정한 표적 노드의 위치 정보를 최종 위치 정보로 확정할 수 있다. 여기서, 기준값은, 위치 추정 장치에서 추정한 표적 노드의 위치 정보가 정확하게 추정되었는지를 판단하는 기준이 되는 값으로, 잔차 정보가 기준값보다 작거나 같은 경우에 표적 노드의 위치 정보가 정확하게 추정된 것으로 판단할 수 있고, 잔차 정보가 기준값보다 큰 경우에 표적 노드의 위치 정보가 정확하게 추정되지 않은 것으로 판단할 수 있다. 즉, 표적 노드가 이동함에 따라 표적 노드의 통신 범위 내에 위치하는 기준 노드의 개수가 변하게 되는데, 이러한 정보가 갱신되지 않은 경우에 잔차 정보가 기준값보다 커질 수 있다(상술한 도 4의 경우).
잔차 정보와 기준값을 비교한 결과, 잔차 정보가 기준값보다 작거나 같은 것으로 판단된 경우, 위치 추정 장치는 단계 S430에서 추정한 표적 노드의 위치 정보를 최종 위치 정보로 확정할 수 있다(단계 S450).
잔차 정보와 기준값을 비교한 결과, 잔차 정보가 기준값보다 큰 것으로 판단된 경우(즉, 상술한 도 4의 경우), 위치 추정 장치는 표적 노드의 통신 범위 내에 위치한 기준 노드들 중에서 가장 오래된 위치 정보를 가지는 기준 노드를 제외하고(S460), 나머지 기준 노드들의 위치 정보를 가지고 표적 노드의 위치 정보를 다시 추정할 수 있다.
이때, 가장 오래된 위치 정보를 가지는 기준 노드를 제외한 결과 2개의 기준 노드가 남는 경우, 상술한 방법인 2개의 기준 노드의 위치 정보를 사용하여 표적 노드의 위치 정보를 추정하는 방법(S410, S420)을 통해 표적 노드의 위치 정보를 추정할 수 있다. 한편, 가장 오래된 위치 정보를 가지는 기준 노드를 제외한 결과 3개 이상의 기준 노드가 남는 경우, 상술한 방법인 3개 이상의 기준 노드의 위치 정보를 사용하여 표적 노드의 위치 정보를 추정하는 방법(S430, S440, S450, S460)을 통해 표적 노드의 위치 정보를 추정할 수 있다.
이상에서와 같이 본 발명에 따른 위치 추정 장치 및 방법은 상기한 바와 같이 설명된 실시예들의 구성과 방법이 한정되게 적용될 수 있는 것이 아니라, 상기 실시예들은 다양한 변형이 이루어질 수 있도록 각 실시예들의 전부 또는 일부가 선택적으로 조합되어 구성될 수도 있다.
10: 위치 추정 장치
11: 설정부
12: 선정부
13: 추정부
20: 기준 노드
30: 표적 노드
11: 설정부
12: 선정부
13: 추정부
20: 기준 노드
30: 표적 노드
Claims (12)
- 위치 정보를 기준으로 좌표계를 설정하는 설정부;
네트워크를 구성하는 다수의 노드로부터 수신한 노드 간의 연결정보를 기반으로, 위치 추정의 대상인 표적 노드를 선정하는 선정부; 및
상기 표적 노드와 위치 정보를 알고 있는 기준 노드의 연결관계에 따라 상기 표적 노드의 위치 정보를 추정하는 추정부를 포함하는 위치 추정 장치. - 청구항 1에 있어서, 상기 설정부는,
위치 정보를 기준점으로 하여 좌표계를 설정하고, 좌표계 중 하나의 축에 네트워크를 구성하는 적어도 하나의 노드가 위치하도록 좌표계를 교정하고, 기준점과 상기 적어도 하나의 노드 간의 거리 추정을 통해 상기 적어도 하나의 노드의 위치 정보를 추정하는 것을 특징으로 하는 위치 추정 장치. - 청구항 1에 있어서, 상기 선정부는,
네트워크를 구성하는 노드들 중 가장 많은 기준 노드와 연결된 노드를 상기 표적 노드로 선정하는 것을 특징으로 하는 위치 추정 장치. - 청구항 1에 있어서, 상기 추정부는,
상기 표적 노드에 연결된 기준 노드의 수가 2개인 경우,
상기 표적 노드와 하나의 기준 노드 간의 거리와 상기 표적 노드와 다른 하나의 기준 노드 간의 거리의 합이, 하나의 기준 노드와 다른 하나의 기준 노드 간의 거리보다 작은 것으로 판단되면,
하나의 기준 노드 위치 정보와 다른 하나의 기준 노드 위치 정보의 중간값을 상기 표적 노드의 위치 정보로 추정하는 것을 특징으로 하는 위치 추정 장치. - 청구항 1에 있어서, 상기 추정부는,
상기 표적 노드에 연결된 기준 노드의 수가 3개 이상인 경우,
상기 표적 노드에 연결된 기준 노드들의 위치 정보를 기반으로 상기 표적 노드의 위치 정보를 추정하고, 추정한 표적 노드의 위치 정보와 상기 표적 노드에 연결된 기준 노드들의 위치 정보 차이를 기반으로 잔차 정보를 생성하고, 상기 잔차 정보와 미리 정해진 기준값을 비교한 결과에 따라 상기 표적 노드의 위치를 다시 추정하거나, 추정한 표적 노드의 위치 정보를 최종 위치 정보로 확정하는 것을 특징으로 하는 위치 추정 장치. - 청구항 5에 있어서, 상기 추정부는,
상기 잔차 정보가 미리 정해진 기준값 보다 큰 경우, 상기 표적 노드에 연결된 기준 노드들의 위치 정보 중 가장 오래된 위치 정보를 제외한 나머지 위치 정보를 기반으로 상기 표적 노드의 위치 정보를 다시 추정하고,
상기 잔차 정보가 미리 정해진 기준값 보다 작거나 같은 경우, 추정한 표적 노드의 위치 정보를 최종 위치 정보로 확정하는 것을 특징으로 하는 위치 추정 장치. - 네트워크를 구성하는 다수의 노드 중 임의의 노드에서 수행되는 위치 추정 방법에 있어서,
상기 임의의 노드의 위치를 기준으로 좌표계를 설정하는 단계;
네트워크를 구성하는 노드들로부터 노드 간의 연결정보를 수신하는 단계;
상기 연결정보를 기반으로 위치 추정의 대상인 표적 노드를 선정하는 단계; 및
상기 표적 노드와 위치 정보를 알고 있는 기준 노드의 연결관계에 따라 상기 표적 노드의 위치 정보를 추정하는 단계를 포함하는 위치 추정 방법. - 청구항 7에 있어서, 상기 임의의 노드의 위치를 기준으로 좌표계를 설정하는 단계는,
상기 임의의 노드의 위치를 기준점으로 하여 좌표계를 설정하는 단계;
좌표계 중 하나의 축에 네트워크를 구성하는 적어도 하나의 노드가 위치하도록 좌표계를 교정하는 단계; 및
상기 기준점과 상기 적어도 하나의 노드 간의 거리 추정을 통해 상기 적어도 하나의 노드 위치 정보를 추정하는 단계를 포함하는 위치 추정 방법. - 청구항 7에 있어서, 상기 연결정보를 기반으로 위치 추정의 대상인 표적 노드를 선정하는 단계는,
네트워크를 구성하는 노드들 중 가장 많은 기준 노드와 연결된 노드를 상기 표적 노드로 선정하는 것을 특징으로 하는 위치 추정 방법. - 청구항 7에 있어서, 상기 표적 노드와 위치 정보를 알고 있는 기준 노드의 연결관계에 따라 상기 표적 노드의 위치 정보를 추정하는 단계는,
상기 표적 노드에 연결된 기준 노드의 수가 2개인 경우,
상기 표적 노드와 하나의 기준 노드 간의 거리와 상기 표적 노드와 다른 하나의 기준 노드 간의 거리의 합이, 하나의 기준 노드와 다른 하나의 기준 노드 간의 거리보다 작은 것으로 판단되면,
하나의 기준 노드 위치 정보와 다른 하나의 기준 노드 위치 정보의 중간값을 상기 표적 노드의 위치 정보로 추정하는 것을 특징으로 하는 위치 추정 방법. - 청구항 7에 있어서, 상기 표적 노드와 위치 정보를 알고 있는 기준 노드의 연결관계에 따라 상기 표적 노드의 위치 정보를 추정하는 단계는,
상기 표적 노드에 연결된 기준 노드의 수가 3개 이상인 경우,
상기 표적 노드에 연결된 기준 노드들의 위치 정보를 기반으로 상기 표적 노드의 위치 정보를 추정하는 단계;
추정한 표적 노드의 위치 정보와 상기 표적 노드에 연결된 기준 노드들의 위치 정보 차이를 기반으로 잔차 정보를 생성하는 단계; 및
상기 잔차 정보와 미리 정해진 기준값을 비교한 결과에 따라 상기 표적 노드의 위치 정보를 다시 추정하거나, 추정한 표적 노드의 위치 정보를 최종 위치 정보로 확정하는 단계를 포함하는 위치 추정 방법. - 청구항 11에 있어서, 상기 잔차 정보와 미리 정해진 기준값을 비교한 결과에 따라 상기 표적 노드의 위치 정보를 다시 추정하거나, 추정한 표적 노드의 위치 정보를 최종 위치 정보로 확정하는 단계는,
상기 잔차 정보가 미리 정해진 기준값 보다 큰 경우, 상기 표적 노드에 연결된 기준 노드들의 위치 정보 중 가장 오래된 위치 정보를 제외한 나머지 위치 정보를 기반으로 상기 표적 노드의 위치 정보를 다시 추정하는 단계; 및
상기 잔차 정보가 미리 정해진 기준값 보다 작거나 같은 경우, 추정한 표적 노드의 위치 정보를 최종 위치 정보로 확정하는 단계를 포함하는 위치 추정 방법.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020120060312A KR20130136708A (ko) | 2012-06-05 | 2012-06-05 | 위치 추정 장치 및 방법 |
| US13/775,652 US20130324150A1 (en) | 2012-06-05 | 2013-02-25 | Location estimation apparatus and method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020120060312A KR20130136708A (ko) | 2012-06-05 | 2012-06-05 | 위치 추정 장치 및 방법 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20130136708A true KR20130136708A (ko) | 2013-12-13 |
Family
ID=49670858
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020120060312A Withdrawn KR20130136708A (ko) | 2012-06-05 | 2012-06-05 | 위치 추정 장치 및 방법 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US20130324150A1 (ko) |
| KR (1) | KR20130136708A (ko) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20230099844A (ko) * | 2021-12-28 | 2023-07-05 | 포항공과대학교 산학협력단 | 0(n) 오버헤드를 가지는 전송 지연 기반 3차원 좌표계 생성 및 관리 방법 |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9407317B2 (en) * | 2013-04-03 | 2016-08-02 | Umm Al-Qura University | Differential ultra-wideband indoor positioning method |
| BE1023168B1 (fr) * | 2014-03-25 | 2016-12-08 | Bordersystem Sprl | Systeme de protection de personnes sur chantier par localisation precise. |
| CN104796910B (zh) * | 2015-03-12 | 2018-05-29 | 国家电网公司 | 一种基于纳什均衡的锚节点节能式定位组网方法 |
| US20170265041A1 (en) * | 2016-03-09 | 2017-09-14 | Honeywell International Inc. | Systems, methods, and devices for indoor location |
| US11348428B2 (en) * | 2020-03-12 | 2022-05-31 | Sam Heidari | System and methods for identifying a subject through device-free and device-oriented sensing technologies |
| US10382894B2 (en) | 2017-07-28 | 2019-08-13 | Electronics And Telecommunications Research Institute | Method of measuring inter-device relative coordinates and device using the same |
| CN107948945B (zh) * | 2017-11-08 | 2020-04-28 | 顺丰科技有限公司 | 一种室内定位的通信控制系统及控制方法 |
| US10534068B2 (en) * | 2018-12-27 | 2020-01-14 | Intel Corporation | Localization system, vehicle control system, and methods thereof |
| CN110286358A (zh) * | 2019-06-28 | 2019-09-27 | 努比亚技术有限公司 | 一种室内定位方法、设备及计算机可读存储介质 |
| CN116996996B (zh) * | 2023-09-27 | 2023-12-12 | 中国电建集团贵阳勘测设计研究院有限公司 | 一种智慧建造工地运维管控定位方法及系统 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8565788B2 (en) * | 2005-02-03 | 2013-10-22 | Mexens Intellectual Property Holding Llc | Method and system for obtaining location of a mobile device |
| US8634860B2 (en) * | 2010-01-15 | 2014-01-21 | Apple Inc. | Location determination using cached location area codes |
| US8494554B2 (en) * | 2011-06-03 | 2013-07-23 | Apple Inc. | Mobile device location estimation |
| US20130072220A1 (en) * | 2011-09-19 | 2013-03-21 | Qualcomm Atheros, Inc. | Hybrid tdoa and toa based positioning system |
-
2012
- 2012-06-05 KR KR1020120060312A patent/KR20130136708A/ko not_active Withdrawn
-
2013
- 2013-02-25 US US13/775,652 patent/US20130324150A1/en not_active Abandoned
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20230099844A (ko) * | 2021-12-28 | 2023-07-05 | 포항공과대학교 산학협력단 | 0(n) 오버헤드를 가지는 전송 지연 기반 3차원 좌표계 생성 및 관리 방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20130324150A1 (en) | 2013-12-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20130136708A (ko) | 위치 추정 장치 및 방법 | |
| Tiemann et al. | Design of an UWB indoor-positioning system for UAV navigation in GNSS-denied environments | |
| EP3186654B1 (en) | Method and apparatus for real-time, mobile-based positioning according to sensor and radio frequency measurements | |
| KR102158029B1 (ko) | 전파 지도를 이용한 실내위치 인식 방법 및 장치 | |
| US10382894B2 (en) | Method of measuring inter-device relative coordinates and device using the same | |
| Hepp et al. | Omni-directional person tracking on a flying robot using occlusion-robust ultra-wideband signals | |
| Kim et al. | NLOS identification based UWB and PDR hybrid positioning system | |
| US20160183057A1 (en) | Method and system for hybrid location detection | |
| Zwirello et al. | Sensor data fusion in UWB-supported inertial navigation systems for indoor navigation | |
| KR101608976B1 (ko) | 인프라 없는 환경에서의 근거리 무선통신망 기반 협업 위치 측정 방법 및 시스템 | |
| KR101814698B1 (ko) | 무선 송수신을 이용한 앵커와 태그의 좌표 동시 설정 방법 및 통신 시스템 | |
| JP2007064978A (ja) | 屋内位置追跡方法及び屋内位置追跡システム | |
| Sang et al. | Bidirectional UWB localization: A review on an elastic positioning scheme for GNSS-deprived zones | |
| KR20160135584A (ko) | Uwb에 기반한 초정밀 측위 방법 및 시스템 | |
| Pelka et al. | S-TDoA—Sequential time difference of arrival—A scalable and synchronization free approach forl positioning | |
| CN114019450A (zh) | 基于uwb的室内移动机器人定位方法 | |
| Syberfeldt et al. | Localizing operators in the smart factory: A review of existing techniques and systems | |
| Lategahn et al. | Tdoa and rss based extended kalman filter for indoor person localization | |
| CN112272782A (zh) | 使用附近的超声信号对移动设备进行临时定位 | |
| Tiemann et al. | Ultra-wideband aided precision parking for wireless power transfer to electric vehicles in real life scenarios | |
| Liu et al. | Performance comparison of UWB IEEE 802.15. 4z and IEEE 802.15. 4 in ranging, energy efficiency, and positioning | |
| KR20120072152A (ko) | 차등 삼각법을 이용한 무선노드 위치추정 방법 | |
| KR20180138067A (ko) | 정밀도를 향상시킨 실시간 측위 방법 및 시스템 | |
| Oliveira et al. | Fusing time-of-flight and received signal strength for adaptive radio-frequency ranging | |
| KR101268574B1 (ko) | 태그 위치 추정 방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
Patent event code: PA01091R01D Comment text: Patent Application Patent event date: 20120605 |
|
| PG1501 | Laying open of application | ||
| PC1203 | Withdrawal of no request for examination | ||
| WITN | Application deemed withdrawn, e.g. because no request for examination was filed or no examination fee was paid |