KR20140000433A - 열차 무결성 모니터링 시스템 - Google Patents
열차 무결성 모니터링 시스템 Download PDFInfo
- Publication number
- KR20140000433A KR20140000433A KR1020120067361A KR20120067361A KR20140000433A KR 20140000433 A KR20140000433 A KR 20140000433A KR 1020120067361 A KR1020120067361 A KR 1020120067361A KR 20120067361 A KR20120067361 A KR 20120067361A KR 20140000433 A KR20140000433 A KR 20140000433A
- Authority
- KR
- South Korea
- Prior art keywords
- vehicle
- train
- tims
- separated
- connection information
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000012544 monitoring process Methods 0.000 title claims abstract description 45
- 101100328463 Mus musculus Cmya5 gene Proteins 0.000 claims abstract description 24
- 238000000176 thermal ionisation mass spectrometry Methods 0.000 claims abstract description 24
- 238000013055 trapped ion mobility spectrometry Methods 0.000 claims abstract description 24
- 238000000034 method Methods 0.000 claims abstract description 17
- 230000005540 biological transmission Effects 0.000 claims abstract description 12
- 238000004891 communication Methods 0.000 claims description 17
- 230000006870 function Effects 0.000 claims description 8
- 230000008569 process Effects 0.000 abstract description 4
- 238000000926 separation method Methods 0.000 description 11
- 230000008901 benefit Effects 0.000 description 3
- 238000009434 installation Methods 0.000 description 3
- 238000012423 maintenance Methods 0.000 description 3
- 238000012806 monitoring device Methods 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 230000005856 abnormality Effects 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 230000007257 malfunction Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000000737 periodic effect Effects 0.000 description 1
- 238000005204 segregation Methods 0.000 description 1
- 230000035939 shock Effects 0.000 description 1
Images



Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L15/00—Indicators provided on the vehicle or train for signalling purposes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L15/00—Indicators provided on the vehicle or train for signalling purposes
- B61L15/0018—Communication with or on the vehicle or train
- B61L15/0036—Conductor-based, e.g. using CAN-Bus, train-line or optical fibres
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L15/00—Indicators provided on the vehicle or train for signalling purposes
- B61L15/0072—On-board train data handling
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L15/00—Indicators provided on the vehicle or train for signalling purposes
- B61L15/009—On-board display devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L25/00—Recording or indicating positions or identities of vehicles or trains or setting of track apparatus
- B61L25/02—Indicating or recording positions or identities of vehicles or trains
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Train Traffic Observation, Control, And Security (AREA)
Abstract
본 발명에 따르면, 열차의 모든 차량에 TIMS를 설치하고 차량연결정보를 송수신하는 과정에서 실시간으로 차량이 분리되었는지를 감시하고 분리된 경우 인접 차량의 TIMS에서 분리된 차량의 위치 데이터를 포함하는 차량연결정보를 생성 및 전송해주어 열차 분리 여부뿐만 아니라 분리된 열차 위치까지 정확히 알 수 있어 이에 따른 신속한 대처를 할 수 있는 장점이 있다.
Description
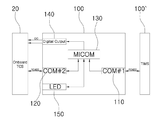
도 2는 본 발명에 따른 열차무결성 모니터링을 위한 모니터링 시스템의 상세 구성도이다.
도 3은 본 발명에 따른 열차무결성 모니터링을 위한 모니터링 시스템의 제어 흐름도이다.
도 4는 본 발명에 따른 열차무결성 모니터링을 위한 모니터링 시스템의 데이터 흐름도이다.
20: 열차제어시스템(TCS) 100,100',100": TIMS
110: 제1송수신부 120: 제2송수신부
130: 제어부 140: 데이터출력부
150: 표시부
Claims (9)
- 열차의 각 차량에 설치되어 인접하여 연결된 차량의 차량연결정보를 송수신하며, 열차가 분리되면 분리된 차량의 위치를 인지하여 열차의 운행을 통합 제어하는 열차제어시스템(TCS)으로 분리차량의 위치 데이터를 전송하는 열차 무결성 감시를 위한 모니터링 시스템(TIMS)에 있어서,
상기 TIMS는 인접 차량의 TIMS로 현재 차량의 차량연결정보를 송신하고 인접차량의 차량연결정보를 수신하는 제1송수신부와,
상기 인접 차량의 TIMS로부터 차량연결정보가 수신되면 현재차량의 차량연결정보를 송신하는 제2송수신부와,
상기 제1송수신부와 제2송수신부를 통해 수신되는 차량연결정보를 분석하고 분리된 차량의 위치 데이터가 포함되면 분리된 차량의 위치 데이터를 포함하는 차량연결정보의 송신을 제어하는 제어부와,
상기 분리차량의 위치 데이터를 열차의 운행을 통합 제어하는 열차제어시스템(TCS)으로 전송하는 데이터출력부로 구성되는 것을 특징으로 하는 열차 무결성 모니터링 시스템.
- 제 1항에 있어서,
상기 열차는 전두부 차량과 연결차량 및 후두부 차량으로 이루어지며;
상기 전두부 차량에 설치되는 TIMS는 열차가 분리되면 열차제어시스템(TCS)으로 분리차량의 위치 데이터를 전송하고, 인접한 연결 차량에 설치되는 TIMS로 현재 차량의 차량연결정보를 전송하고 연결 차량으로부터 인접차량의 차량연결정보를 수신하는 마스터(Master) TIMS인 것을 특징으로 하는 열차 무결성 모니터링 시스템.
- 제 2항에 있어서,
상기 연결 차량에 설치되는 TIMS는 인접한 전두부 차량이나 연결 차량 또는 후두부 차량에 설치되는 TIMS로 현재차량의 차량연결정보를 전송하고 연결 차량으로부터 차량연결정보를 수신하는 슬래이브(Slave) TIMS인 것을 특징으로 하는 열차 무결성 모니터링 시스템.
- 제 2항에 있어서,
상기 후두부 차량에 설치되는 TIMS는 전두부 차량에 설치되는 마스터(Master) TIMS의 기능 이상 또는 추후 열차의 중간부분에서 분리시에 열차의 비상제어를 위한 서브 마스터(Sub-Master) TIMS인 것을 특징으로 하는 열차 무결성 모니터링 시스템.
- 제 2항에 있어서,
상기 데이터출력부는 TIMS는 열차의 분리 여부에 관한 분리차량 위치 데이터를 상기 열차제어시스템(TCS)에 제공하기 위해 두 개의 DC 출력을 가지는 것을 특징으로 하는 열차 무결성 모니터링 시스템.
- 제 1항에 있어서,
상기 제1 및 제2송수신부는 RS422 Serial 통신 방식으로 열차제어시스템 또는 인접한 차량의 TIMS와 연결되는 것을 특징으로 하는 열차 무결성 모니터링 시스템.
- 제 1항에 있어서,
상기 TIMS은 시스템 출력의 신뢰도를 높이기 위해 차량인터페이스부(Vehicle Interface)를 통해 열차 비상제동 체결시 사용되는 EBR이나 제동 공기압 정보를 수신하는 것을 특징으로 하는 열차 무결성 모니터링 시스템.
- 제 1항에 있어서,
상기 제어부는 내장메모리가 구비되는 마이콤(MICOM)으로 구성되는 것을 특징으로 하는 열차 무결성 모니터링 시스템.
- 제 1항에 있어서,
상기 TIMS는 인접한 차량과의 연결상태를 확인할 수 있도록 차량연결정보를 디스플레이하는 표시부가 더 구비되는 것을 특징으로 하는 열차 무결성 모니터링 시스템.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020120067361A KR101357806B1 (ko) | 2012-06-22 | 2012-06-22 | 열차 무결성 모니터링 시스템 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020120067361A KR101357806B1 (ko) | 2012-06-22 | 2012-06-22 | 열차 무결성 모니터링 시스템 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20140000433A true KR20140000433A (ko) | 2014-01-03 |
| KR101357806B1 KR101357806B1 (ko) | 2014-02-05 |
Family
ID=50138306
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020120067361A Active KR101357806B1 (ko) | 2012-06-22 | 2012-06-22 | 열차 무결성 모니터링 시스템 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR101357806B1 (ko) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20160080839A (ko) * | 2014-12-29 | 2016-07-08 | 주식회사 포스코아이씨티 | 열차 방호를 수행하는 통신기반 열차 제어 시스템 및 그 방법 |
| KR20180015786A (ko) * | 2016-08-03 | 2018-02-14 | 한국철도기술연구원 | 열차간 통신기반 열차제어시스템의 선행열차 탐색 및 무결성 확인방법 |
| CN111605580A (zh) * | 2019-02-22 | 2020-09-01 | 塔莱斯德国有限责任公司 | 用于车厢到车厢通信的方法,用于控制列车完整性的方法和列车车厢 |
| JP2023551392A (ja) * | 2020-11-12 | 2023-12-08 | フェヴレ・トランスポール・イタリア・ソチエタ・ペル・アツィオーニ | 車列、特に鉄道車列の完全性を検証するためのシステム |
| KR20240031714A (ko) | 2022-09-01 | 2024-03-08 | 케이티엠엔지니어링(주) | 다중 변수 기초의 열차 통합 모니터링 시스템 |
| KR20240065367A (ko) | 2022-11-04 | 2024-05-14 | 케이티엠엔지니어링(주) | 인공지능 알고리즘에 기초하는 열차 통합 모니터링 시스템 |
| KR20240140460A (ko) | 2023-03-17 | 2024-09-24 | 케이티엠엔지니어링(주) | 사전 진단에 의한 열차 통합 모니터링 시스템 |
| KR20250049049A (ko) | 2023-10-04 | 2025-04-11 | 케이티엠엔지니어링(주) | 부품 고장 예지를 위한 열차 통합 모니터링 시스템 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102503558B1 (ko) | 2022-10-26 | 2023-02-28 | 인터콘시스템스 주식회사 | 이력 무결성 시스템이 구비된 열차제어장치 |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001088704A (ja) * | 1999-09-27 | 2001-04-03 | Niigata Eng Co Ltd | 車両制御用信号伝送装置 |
| KR100636592B1 (ko) * | 2005-03-18 | 2006-10-19 | 주식회사 로템 | 중련 연결된 전동차의 티씨엠에스 상의 통신 네트워크설정방법 |
-
2012
- 2012-06-22 KR KR1020120067361A patent/KR101357806B1/ko active Active
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20160080839A (ko) * | 2014-12-29 | 2016-07-08 | 주식회사 포스코아이씨티 | 열차 방호를 수행하는 통신기반 열차 제어 시스템 및 그 방법 |
| KR20180015786A (ko) * | 2016-08-03 | 2018-02-14 | 한국철도기술연구원 | 열차간 통신기반 열차제어시스템의 선행열차 탐색 및 무결성 확인방법 |
| KR101864340B1 (ko) * | 2016-08-03 | 2018-06-07 | 한국철도기술연구원 | 열차간 통신기반 열차제어시스템의 선행열차 탐색 및 무결성 확인방법 |
| CN111605580A (zh) * | 2019-02-22 | 2020-09-01 | 塔莱斯德国有限责任公司 | 用于车厢到车厢通信的方法,用于控制列车完整性的方法和列车车厢 |
| US11584411B2 (en) | 2019-02-22 | 2023-02-21 | Thales Management & Services Deutschland Gmbh | Method for wagon-to-wagon communication, method for controlling integrity of a train and train wagon |
| CN111605580B (zh) * | 2019-02-22 | 2023-02-21 | 塔莱斯管理与服务德国有限责任公司 | 车厢之间通信的方法,控制列车完整性的方法和列车车厢 |
| JP2023551392A (ja) * | 2020-11-12 | 2023-12-08 | フェヴレ・トランスポール・イタリア・ソチエタ・ペル・アツィオーニ | 車列、特に鉄道車列の完全性を検証するためのシステム |
| KR20240031714A (ko) | 2022-09-01 | 2024-03-08 | 케이티엠엔지니어링(주) | 다중 변수 기초의 열차 통합 모니터링 시스템 |
| KR20240065367A (ko) | 2022-11-04 | 2024-05-14 | 케이티엠엔지니어링(주) | 인공지능 알고리즘에 기초하는 열차 통합 모니터링 시스템 |
| KR20240140460A (ko) | 2023-03-17 | 2024-09-24 | 케이티엠엔지니어링(주) | 사전 진단에 의한 열차 통합 모니터링 시스템 |
| KR20250049049A (ko) | 2023-10-04 | 2025-04-11 | 케이티엠엔지니어링(주) | 부품 고장 예지를 위한 열차 통합 모니터링 시스템 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR101357806B1 (ko) | 2014-02-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101357806B1 (ko) | 열차 무결성 모니터링 시스템 | |
| CN105401824B (zh) | 适用于全自动驾驶列车的车门控制方法及系统 | |
| US9475509B2 (en) | Guided ground vehicle including a device for managing a derailment of the vehicle, and associated derailment management method | |
| KR101318850B1 (ko) | 무선통신시스템과 폴백시스템을 이용한 열차제어시스템 및 방법 | |
| KR100961489B1 (ko) | 철도신호용 열차분리 검지 시스템 | |
| JP6051092B2 (ja) | 列車制御システム | |
| EP2873585B1 (en) | A method and a system for monitoring the operability of a balise | |
| KR20100073861A (ko) | 열차 자동 제어 시스템의 차상 신호 장치 및 그 동작 방법 | |
| KR101059190B1 (ko) | 열차의 atc/ato 차상 시스템 | |
| KR101049176B1 (ko) | 열차 정위치 정차 장치 | |
| CN105579323B (zh) | 轨道车辆的运行 | |
| JP5800697B2 (ja) | 鉄道信号保安システム | |
| CN107428350A (zh) | 用于探测另外车辆碰靠的车辆的方法和设备 | |
| CN120603750A (zh) | 具有长区块时间延迟的虚拟区块运行状态控制系统和方法 | |
| KR100644227B1 (ko) | 열차운행 종합제어장치 및 그 제어방법 | |
| US20200269890A1 (en) | Method for operating a rail vehicle network | |
| JP6091385B2 (ja) | 列車無線システム | |
| KR20130107976A (ko) | 열차위치 보조 검지 장치를 활용한 열차 제어 시스템 및 열차의 방호 방법 | |
| KR101646951B1 (ko) | 양방향 및 전이중 통신이 가능한 지상과 차상간의 통신장치, 그리고 그 제어방법 | |
| CN201970995U (zh) | 列车安全保护系统 | |
| KR102561628B1 (ko) | Etcs 인터페이스 장치가 포함된 etcs 시스템 | |
| EP4197879B1 (en) | Point-type train control on-board system and train control method | |
| KR20130137855A (ko) | 분기부 진입 경고장치 및 분기부 비상정지장치 | |
| KR101598703B1 (ko) | 철도차량용 차상 신호장치 복구 시스템 | |
| JP2000289616A (ja) | 移動体位置検知システム、及び移動体位置検知方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| PA0109 | Patent application |
Patent event code: PA01091R01D Comment text: Patent Application Patent event date: 20120622 |
|
| PA0201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20130913 Patent event code: PE09021S01D |
|
| PG1501 | Laying open of application | ||
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
Patent event code: PE07011S01D Comment text: Decision to Grant Registration Patent event date: 20140123 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
Comment text: Registration of Establishment Patent event date: 20140124 Patent event code: PR07011E01D |
|
| PR1002 | Payment of registration fee |
Payment date: 20140127 End annual number: 3 Start annual number: 1 |
|
| PG1601 | Publication of registration | ||
| FPAY | Annual fee payment |
Payment date: 20170102 Year of fee payment: 4 |
|
| PR1001 | Payment of annual fee |
Payment date: 20170102 Start annual number: 4 End annual number: 4 |
|
| FPAY | Annual fee payment |
Payment date: 20180103 Year of fee payment: 5 |
|
| PR1001 | Payment of annual fee |
Payment date: 20180103 Start annual number: 5 End annual number: 5 |
|
| FPAY | Annual fee payment |
Payment date: 20181211 Year of fee payment: 6 |
|
| PR1001 | Payment of annual fee |
Payment date: 20181211 Start annual number: 6 End annual number: 6 |
|
| FPAY | Annual fee payment |
Payment date: 20191210 Year of fee payment: 7 |
|
| PR1001 | Payment of annual fee |
Payment date: 20191210 Start annual number: 7 End annual number: 7 |
|
| PR1001 | Payment of annual fee |
Payment date: 20201209 Start annual number: 8 End annual number: 8 |
|
| PR1001 | Payment of annual fee |
Payment date: 20211206 Start annual number: 9 End annual number: 9 |
|
| PR1001 | Payment of annual fee |
Payment date: 20221207 Start annual number: 10 End annual number: 10 |
|
| PR1001 | Payment of annual fee |
Payment date: 20231206 Start annual number: 11 End annual number: 11 |