KR20140024331A - 전기 기계를 제어하는 방법 및 장치 - Google Patents
전기 기계를 제어하는 방법 및 장치 Download PDFInfo
- Publication number
- KR20140024331A KR20140024331A KR1020137027609A KR20137027609A KR20140024331A KR 20140024331 A KR20140024331 A KR 20140024331A KR 1020137027609 A KR1020137027609 A KR 1020137027609A KR 20137027609 A KR20137027609 A KR 20137027609A KR 20140024331 A KR20140024331 A KR 20140024331A
- Authority
- KR
- South Korea
- Prior art keywords
- angle
- observer
- vector
- control
- emf
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images






Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/34—Modelling or simulation for control purposes
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P1/00—Arrangements for starting electric motors or dynamo-electric converters
- H02P1/02—Details of starting control
- H02P1/04—Means for controlling progress of starting sequence in dependence upon time or upon current, speed, or other motor parameter
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/0003—Control strategies in general, e.g. linear type, e.g. P, PI, PID, using robust control
- H02P21/0021—Control strategies in general, e.g. linear type, e.g. P, PI, PID, using robust control using different modes of control depending on a parameter, e.g. the speed
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/13—Observer control, e.g. using Luenberger observers or Kalman filters
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/14—Estimation or adaptation of machine parameters, e.g. flux, current or voltage
- H02P21/18—Estimation of position or speed
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P23/00—Arrangements or methods for the control of AC motors characterised by a control method other than vector control
- H02P23/03—Arrangements or methods for the control of AC motors characterised by a control method other than vector control specially adapted for very low speeds
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/14—Electronic commutators
- H02P6/16—Circuit arrangements for detecting position
- H02P6/18—Circuit arrangements for detecting position without separate position detecting elements
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/14—Electronic commutators
- H02P6/16—Circuit arrangements for detecting position
- H02P6/18—Circuit arrangements for detecting position without separate position detecting elements
- H02P6/182—Circuit arrangements for detecting position without separate position detecting elements using back-emf in windings
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/20—Arrangements for starting
- H02P6/21—Open loop start
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P23/00—Arrangements or methods for the control of AC motors characterised by a control method other than vector control
- H02P23/12—Observer control, e.g. using Luenberger observers or Kalman filters
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S388/00—Electricity: motor control systems
- Y10S388/923—Specific feedback condition or device
- Y10S388/9281—Counter or back emf, CEMF
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Control Of Motors That Do Not Use Commutators (AREA)
- Control Of Ac Motors In General (AREA)
Abstract
Description
도 5는 회전 기준 프레임에서의 기계의 등가 회로를 보여준다.
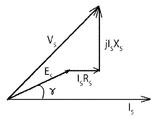
도 6은 전동기가 시동중에 있고 아직 저속으로 동작하고 있으며 EMF 벡터의 크기가 비교적 작은 경우에 전동기의 회전 기준 프레임에서의 벡터 다이어그램을 보여준다.
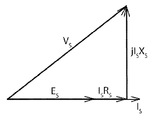
도 7은 EMF 벡터의 크기를 크게 하고 부하를 증가시킨 상태에서 저속으로 동작하는 전동기의 부가적인 벡터 다이어그램을 보여준다.
도 8은 인출에 근접한 상태로 동작하는 전동기의 부가적인 벡터 다이어그램을 보여준다.
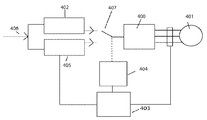
도 9는 전자식 제어 시스템의 구성 부품들의 블록 다이어그램을 보여준다.
도 10은 전자식 제어 시스템에서 이루어지는 결정 프로세스의 플로차트를 보여준다.

Claims (21)
- 전기 기계용 제어 시스템으로서,
상기 전기 기계용 제어 시스템은,
개방 루프 제어가 전기 기계를 구동시키는데 사용되는 시간 동안 동작하도록 구성된 관측기로서, 전기 기계를 제어하도록 구성된 인버터에 의해 제공되는 전류 여자 벡터 및 회전 EMF 벡터 간의 각도에 관련된 신호 E_l_ angle을 출력하도록 부가적으로 구성된 관측기를 포함하고,
상기 관측기는 합산 항(summation term)을 포함하는 반복 계산으로 상기 각도를 결정하도록 구성되며, 상기 합산 항은 추정된 EMF 위치 벡터에 대한 회전 EMF 벡터의 직각 성분의 변화를 합산하고,
상기 전기 기계용 제어 시스템은 상기 관측기에 의해 출력된 각도를 사용하여 상기 회전 EMF 위치 벡터의 추정된 각도 위치를 업데이트하도록 구성되는, 전기 기계용 제어 시스템. - 제1항에 있어서, 상기 관측기는 관측기 출력 신호 E_l_ angle을 사용하여, 관측기 출력 신호가 인출 조건들에 근접한 조건들을 나타내는 임계값 미만인 값에 이르게 될 경우에 폐루프 제어로의 천이 시간을 결정하도록 구성되는, 전기 기계용 제어 시스템.
- 제1항 또는 제2항에 있어서, 상기 회전 EMF 벡터 및 상기 전류 여자 벡터 간의 큰 각도로 나타낸 비교적 낮은 부하 토크 레벨들 동안, 상기 관측기가 상기 전류 여자 벡터의 크기를 감소시키라고 상기 인버터에 지시하도록 구성되기 위해 상기 관측기가 관측기 출력 신호 E_l_ angle을, 개방 루프 구동 전기 기계용 토크 모니터링 시스템으로서 사용하도록 구성되는, 전기 기계용 제어 시스템.
- 제1항 내지 제3항 중 어느 한 항에 있어서, 상기 회전 EMF 벡터 및 상기 전류 여자 벡터 간의 작은 각도로 나타낸 비교적 높은 부하 토크 레벨들 동안, 상기 관측기가 상기 전류 여자 벡터의 크기를 증가시키라고 상기 인버터에 지시하도록 구성되기 위해 상기 관측기가 관측기 출력 신호 E_l_ angle을, 개방 루프 구동 전기 기계용 토크 모니터링 시스템으로서 사용하도록 구성되는, 전기 기계용 제어 시스템.
- 제1항 내지 제4항 중 어느 한 항에 있어서, 상기 회전 EMF 벡터 및 상기 전류 여자 벡터 간의 큰 각도로 나타낸 비교적 낮은 부하 토크 레벨들 동안, 관측기 출력 신호 E_l_ angle이 인출 조건들에 근접한 조건들을 나타내는 임계값 미만인 값에 이르게 되고 폐루프 제어로의 유연한 천이가 개시될 수 있을 때까지 상기 관측기가 상기 전류 여자 벡터의 크기를 점진적으로 감소시키라고 상기 인버터에 지시하도록 구성되기 위해 상기 관측기가 관측기 출력 신호 E_l_ angle을, 개방 루프 구동 전기 기계용 토크 모니터링 시스템으로서 사용하도록 구성되는, 전기 기계용 제어 시스템.
- 제1항 내지 제5항 중 어느 한 항에 있어서, 상기 전기 기계용 제어 시스템은 동기 전동기를 제어하도록 구성되는, 전기 기계용 제어 시스템.
- 전기 기계를 제어하는 제어 시스템에서 사용하기 위한 관측기로서,
상기 관측기는, 개방 루프 제어가 전기 기계를 구동하는데 사용되는 시간 동안 동작하도록 구성되고, 전기 기계를 제어하도록 구성된 인버터에 의해 제공되는 전류 여자 벡터 및 회전 EMF 벡터 간의 각도에 관련된 신호 E_l_ angle을 출력하도록 부가적으로 구성되며,
상기 관측기는 합산 항을 포함하는 반복 계산으로 상기 각도를 결정하도록 구성되고, 상기 합산 항은 추정된 EMF 위치 벡터에 대한 회전 EMF 벡터의 직각 성분의 변화를 합산하는, 관측기. - 전기 기계를 제어하는 방법에 있어서,
상기 전기 기계의 제어 방법은,
개방 루프 제어가 전기 기계를 구동하는데 사용되는 시간 동안 관측기를 동작시키는 단계로서, 상기 관측기의 출력이 전기 기계를 제어하도록 구성된 인버터에 의해 제공되는 전류 여자 벡터 및 회전 EMF 벡터 간의 각도에 관련된 신호 E_l_angle인 단계;
합산 항을 포함하는 반복 계산으로 상기 각도를 상기 관측기를 사용하여 결정하는 단계로서, 상기 합산 항은 추정된 EMF 위치 벡터에 대한 회전 EMF 벡터의 직각 성분의 변화를 합산하는 단계; 및
상기 관측기에 의해 출력된 각도를 사용하여 상기 회전 EMF 위치 벡터의 추정된 각도 위치를 업데이트하는 단계;
를 포함하는, 전기 기계의 제어 방법. - 개방 루프 제어 구성에서 동작하는 전기 기계를 제어하는 방법에 있어서,
상기 전기 기계의 제어 방법은,
상기 전기 기계를 제어하기 위해 제공되는 전류 여자 벡터 및 회전 EMF 벡터 간의 각도 E_l_ angle을 결정하는 단계; 및
상기 전기 기계에 하나 이상의 제어 신호들을 인가하는 단계로서, 상기 제어 신호들은 E_l_ angle에 의존하여 결정되는 단계;
를 포함하는, 전기 기계의 제어 방법. - 제9항에 있어서, 상기 E_l_ angle은 합산 항을 포함하는 반복 계산으로 결정되며, 상기 합산 항은 추정된 EMF 위치 벡터에 대한 회전 EMF 벡터의 직각 성분의 변화를 합산하고,
상기 전기 기계의 제어 방법은,
상기 E_l_ angle을 기반으로 하여 상기 EMF 위치 벡터를 업데이트하는 단계;
를 부가적으로 포함하는, 전기 기계의 제어 방법. - 제10항에 있어서, 상기 E_l_ angle은 이하의 수학식

에 의해 결정되고, 상기 수학식 중,는 상기 회전 EMF 벡터의 직각 성분이며, 는
는 에 반비례하게 되는 이득이고
에 반비례하게 되는 이득이고 는 이득값인, 전기 기계의 제어 방법.
는 이득값인, 전기 기계의 제어 방법.
- 제11항에 있어서,는
 에 반비례하게 되는, 전기 기계의 제어 방법.
에 반비례하게 되는, 전기 기계의 제어 방법.
- 제9항 내지 제12항 중 어느 한 항에 있어서, 상기 전기 기계에 하나 이상의 제어 신호들을 인가하는 단계는 개방 루프 제어 구성으로부터 폐루프 센서리스 제어 구성으로의 천이 단계를 포함하는, 전기 기계의 제어 방법.
- 제13항에 있어서, 개방 루프 제어 구성으로부터 폐루프 센서리스 제어 구성으로의 천이 단계는 인출값으로 나타낸 임계값보다 작거나 같은 E_l_ angle의 크기에 그리고 상기 전기 기계에 이미 인가된 최대 전류 여자에 의존하여 수행되는, 전기 기계의 제어 방법.
- 제9항 내지 제14항 중 어느 한 항에 있어서, 상기 전기 기계에 하나 이상의 제어 신호들을 인가하는 단계는 E_l_ angle이 음(-)이고 인출 각도로 나타낸 임계값보다 큰 크기를 지니는 경우에 상기 전기 기계에 상기 전류 여자를 감소시키는 단계를 포함하는, 전기 기계의 제어 방법.
- 제9항 내지 제15항 중 어느 한 항에 있어서, 상기 전기 기계에 하나 이상의 제어 신호들을 인가하는 단계는 E_l_ angle의 크기가 인출 각도로 나타낸 임계값보다 작고 상기 최대 여자 전류가 상기 전기 기계에 아직 인가되지 않은 경우에 상기 전기 기계에 상기 전류 여자를 증가시키는 단계를 포함하는, 전기 기계의 제어 방법.
- 제15항 또는 제16항에 있어서, 상기 여자 전류의 증가 또는 감소는 미리 결정된 증분값 만큼으로 이루어지는, 전기 기계의 제어 방법.
- 컴퓨터 프로그램 코드가 수록된 컴퓨터 판독가능 매체로서, 상기 컴퓨터 프로그램 코드는 컴퓨터에 의해 판독될 경우에 제8항 내지 제17항 중 어느 한 항의 방법을 수행하도록 구성되는, 컴퓨터 판독가능 매체.
- 전기 기계를 제어하는 제어 시스템에서 사용하기 위한 관측기로서, 상기 관측기는 제9항 내지 제17항 중 어느 한 항에 따른 방법을 수행하도록 구성되는, 관측기.
- 제19항에 따른 관측기를 포함하는 전기 기계를 제어하기 위한 제어 시스템.
- 제20항에 따른 제어 시스템을 포함하는 전기 기계.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| GB1105093.7A GB2489434A (en) | 2011-03-25 | 2011-03-25 | Controlling an electrical machine with an observer |
| GB1105093.7 | 2011-03-25 | ||
| PCT/GB2012/050658 WO2012131344A2 (en) | 2011-03-25 | 2012-03-26 | Method and apparatus for controlling an electrical machine |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20140024331A true KR20140024331A (ko) | 2014-02-28 |
| KR101781524B1 KR101781524B1 (ko) | 2017-09-26 |
Family
ID=44067411
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020137027609A Expired - Fee Related KR101781524B1 (ko) | 2011-03-25 | 2012-03-26 | 전기 기계를 제어하는 방법 및 장치 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US8766571B2 (ko) |
| EP (1) | EP2689529B1 (ko) |
| JP (1) | JP5866429B2 (ko) |
| KR (1) | KR101781524B1 (ko) |
| GB (1) | GB2489434A (ko) |
| WO (1) | WO2012131344A2 (ko) |
Families Citing this family (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB2465379A (en) * | 2008-11-17 | 2010-05-19 | Technelec Ltd | Controller for electrical machines |
| JP5904803B2 (ja) * | 2012-01-24 | 2016-04-20 | キヤノン株式会社 | 画像形成装置 |
| CN103248287A (zh) * | 2013-05-15 | 2013-08-14 | 无锡艾柯威科技有限公司 | 一种无位置传感器直接转矩电机控制系统的切换方法 |
| GB2527101B (en) * | 2014-06-12 | 2016-10-19 | Jaguar Land Rover Ltd | A switched reluctance motor with reduced torque ripple |
| DE102015208710A1 (de) * | 2015-05-11 | 2016-11-17 | Baumüller Nürnberg GmbH | Verfahren zum Betrieb einer elektrischen Maschine und Antrieb |
| KR101709854B1 (ko) * | 2015-05-28 | 2017-02-23 | 삼성전기주식회사 | 액츄에이터 구동 장치, 카메라 모듈, 전자 장치 및 액츄에이터 구동 제어 방법 |
| WO2017022083A1 (ja) * | 2015-08-04 | 2017-02-09 | 三菱電機株式会社 | 同期電動機制御装置、圧縮機駆動装置、空気調和機及び同期電動機の制御方法 |
| US10133255B2 (en) | 2016-07-08 | 2018-11-20 | Ricoh Compant, Ltd. | Motor controller, motor driver, and motor driving system |
| JP6767213B2 (ja) * | 2016-09-05 | 2020-10-14 | 東芝インフラシステムズ株式会社 | インバータ制御装置および電動機駆動システム |
| EP3382887A1 (fr) * | 2017-03-27 | 2018-10-03 | Valeo Japan Co., Ltd. | Procede de demarrage pour une machine synchrone, dispositif de commande, machine synchrone et compresseur associes |
| CN110235068B (zh) * | 2017-05-18 | 2022-04-19 | 深圳市海浦蒙特科技有限公司 | 机床主轴的定位控制方法及系统 |
| EP3826170A1 (en) * | 2019-11-21 | 2021-05-26 | Melexis Technologies NV | Stall detection in sine wave driven motors |
| CN111327234B (zh) * | 2020-02-28 | 2021-07-23 | 北京航空航天大学 | 永磁容错电机系统低速段无位置传感器控制方法 |
| EP4220935A1 (en) | 2022-01-28 | 2023-08-02 | Hamilton Sundstrand Corporation | Electric motor control |
| EP4572123A1 (en) * | 2023-12-14 | 2025-06-18 | Melexis Technologies NV | Stall detection of a bldc motor |
| EP4712335A1 (en) * | 2024-09-13 | 2026-03-18 | Melexis Technologies NV | Device and method for controlling a bldc motor |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS60261386A (ja) * | 1984-06-05 | 1985-12-24 | Toshiba Mach Co Ltd | 交流電動機の速度制御装置 |
| JP3454210B2 (ja) * | 1999-11-30 | 2003-10-06 | 株式会社日立製作所 | 同期モータの位置センサレス制御方法 |
| US20040007995A1 (en) * | 2002-07-11 | 2004-01-15 | Visteon Global Technologies, Inc. | Vector control system for permanent magnet sychronous machines using an open-loop parameter observer |
| JP4674516B2 (ja) * | 2005-09-27 | 2011-04-20 | 株式会社デンソー | 同期モータの磁極位置推定方法 |
| KR101258087B1 (ko) * | 2006-05-03 | 2013-04-25 | 엘지전자 주식회사 | 모터의 고속운전 제어 장치 및 그 방법 |
| AU2006347701B2 (en) * | 2006-08-31 | 2010-11-18 | Mitsubishi Electric Corporation | Electric motor driving device, and compressor driving device |
| ATE463073T1 (de) * | 2007-07-26 | 2010-04-15 | Baumueller Nuernberg Gmbh | System zur lage- und geschwindigkeitsermittlung bei einem permanentmagnet-läufer einer elektrischen maschine |
| JP5130031B2 (ja) * | 2007-12-10 | 2013-01-30 | 株式会社日立製作所 | 永久磁石モータの位置センサレス制御装置 |
| GB2465379A (en) * | 2008-11-17 | 2010-05-19 | Technelec Ltd | Controller for electrical machines |
| GB2489412A (en) * | 2011-03-25 | 2012-10-03 | Technelec Ltd | Low speed control of synchronous machines |
-
2011
- 2011-03-25 GB GB1105093.7A patent/GB2489434A/en not_active Withdrawn
-
2012
- 2012-03-26 WO PCT/GB2012/050658 patent/WO2012131344A2/en not_active Ceased
- 2012-03-26 EP EP12717808.5A patent/EP2689529B1/en not_active Not-in-force
- 2012-03-26 JP JP2014501714A patent/JP5866429B2/ja not_active Expired - Fee Related
- 2012-03-26 US US14/007,321 patent/US8766571B2/en not_active Expired - Fee Related
- 2012-03-26 KR KR1020137027609A patent/KR101781524B1/ko not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| GB201105093D0 (en) | 2011-05-11 |
| KR101781524B1 (ko) | 2017-09-26 |
| EP2689529B1 (en) | 2017-10-25 |
| US8766571B2 (en) | 2014-07-01 |
| EP2689529A2 (en) | 2014-01-29 |
| US20140084821A1 (en) | 2014-03-27 |
| WO2012131344A3 (en) | 2013-08-01 |
| GB2489434A (en) | 2012-10-03 |
| JP5866429B2 (ja) | 2016-02-17 |
| WO2012131344A2 (en) | 2012-10-04 |
| JP2014513911A (ja) | 2014-06-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101781524B1 (ko) | 전기 기계를 제어하는 방법 및 장치 | |
| JP5537565B2 (ja) | 電力機器用制御装置 | |
| JP5329005B2 (ja) | 永久磁石式回転電機 | |
| EP2689527B1 (en) | A method and apparatus for control of electrical machines | |
| JP3971741B2 (ja) | 磁極位置検出装置 | |
| JP7432060B2 (ja) | 整流される回転子巻線を備える電気機械内の電力分配 | |
| CN107769633B (zh) | 确定无铁pmsm电机的转子的取向的方法和电机系统 | |
| EP2493066B1 (en) | Method and apparatus for estimating rotor angle and rotor speed of synchronous reluctance motor at start-up | |
| EP2493067B1 (en) | Method and apparatus for estimating rotor angle of synchronous reluctance motor | |
| EP2840701B1 (en) | Sensing PM electrical machine position | |
| US20100237810A1 (en) | Method and controller for controlling an ipm motor | |
| JP2008017608A (ja) | 同期機のセンサレス制御装置 | |
| JP2017055637A (ja) | モータの巻き線に生じる逆起電圧に基づきモータを制御するモータ制御装置 | |
| JP4796472B2 (ja) | ブラシレス直流モータ制御装置、ブラシレス直流モータの制御方法、および、ブラシレス直流モータモジュール | |
| JP4056237B2 (ja) | 同期機の制御装置 | |
| Sanita et al. | Modelling and simulation of four quadrant operation of three phase brushless DC motor with hysteresis current controller | |
| US7067997B2 (en) | Method for determining rotor position angle of synchronous machine | |
| CN115549331A (zh) | 定子组件、电机及激光雷达 | |
| Ahmed | Investigations into the improvement of a single phase permanent magnet brushless dc motor | |
| KR20160071498A (ko) | 저소음을 위한 스위치드 릴럭턴스 모터의 구동 제어 장치 및 구동 제어 방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0105 | International application |
St.27 status event code: A-0-1-A10-A15-nap-PA0105 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| A201 | Request for examination | ||
| A302 | Request for accelerated examination | ||
| E13-X000 | Pre-grant limitation requested |
St.27 status event code: A-2-3-E10-E13-lim-X000 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| PA0302 | Request for accelerated examination |
St.27 status event code: A-1-2-D10-D17-exm-PA0302 St.27 status event code: A-1-2-D10-D16-exm-PA0302 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U12-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |
|
| PC1903 | Unpaid annual fee |
St.27 status event code: A-4-4-U10-U13-oth-PC1903 Not in force date: 20200920 Payment event data comment text: Termination Category : DEFAULT_OF_REGISTRATION_FEE |
|
| PC1903 | Unpaid annual fee |
St.27 status event code: N-4-6-H10-H13-oth-PC1903 Ip right cessation event data comment text: Termination Category : DEFAULT_OF_REGISTRATION_FEE Not in force date: 20200920 |