KR20140046751A - 자동화 수동변속기의 동기 제어방법 - Google Patents
자동화 수동변속기의 동기 제어방법 Download PDFInfo
- Publication number
- KR20140046751A KR20140046751A KR1020120112795A KR20120112795A KR20140046751A KR 20140046751 A KR20140046751 A KR 20140046751A KR 1020120112795 A KR1020120112795 A KR 1020120112795A KR 20120112795 A KR20120112795 A KR 20120112795A KR 20140046751 A KR20140046751 A KR 20140046751A
- Authority
- KR
- South Korea
- Prior art keywords
- synchronization
- change rate
- speed change
- rotational speed
- input shaft
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images

Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D13/00—Control of linear speed; Control of angular speed; Control of acceleration or deceleration, e.g. of a prime mover
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/04—Smoothing ratio shift
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D23/00—Details of mechanically-actuated clutches not specific for one distinct type
- F16D23/02—Arrangements for synchronisation, also for power-operated clutches
- F16D23/04—Arrangements for synchronisation, also for power-operated clutches with an additional friction clutch
- F16D23/06—Arrangements for synchronisation, also for power-operated clutches with an additional friction clutch and a blocking mechanism preventing the engagement of the main clutch prior to synchronisation
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H59/00—Control inputs to control units of change-speed- or reversing-gearings for conveying rotary motion
- F16H59/36—Inputs being a function of speed
- F16H59/38—Inputs being a function of speed of gearing elements
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/04—Smoothing ratio shift
- F16H61/0403—Synchronisation before shifting
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H59/00—Control inputs to control units of change-speed- or reversing-gearings for conveying rotary motion
- F16H59/36—Inputs being a function of speed
- F16H59/38—Inputs being a function of speed of gearing elements
- F16H59/42—Input shaft speed
- F16H2059/425—Rate of change of input or turbine shaft speed
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Control Of Transmission Device (AREA)
Abstract
Description
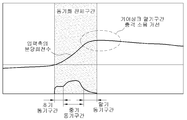
도 2는 본 발명에 의한 동기화 제어방법을 설명하기 위한 블록도면.
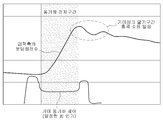
도 3은 본 발명에 의한 동기화 제어방법에 따른 입력축의 속도 변화와, 각 동기구간별 동기속도를 나타낸 도면.
Claims (6)
- 동기화가 진행되는 전체 동기구간을 동기화가 진행되는 속도에 따라 다수의 동기구간으로 나누는 동기구간 구분단계;
상기 동기구간 별로 동기화가 진행되는 속도에 따라 입력축의 목표 회전수변화율을 각각 설정하는 목표 회전수변화율 설정단계; 및
동기화 진행시, 입력축의 회전수변화율이 상기 목표 회전수변화율을 추종하면서 동기화되도록 피드백 제어하는 동기화단계;를 포함하는 자동화 수동변속기의 동기 제어방법. - 동기화가 진행되는 전체 동기구간을 동기화가 진행되는 속도에 따라 다수의 동기구간으로 나누는 동기구간 구분단계;
상기 동기구간 별로 동기화가 진행되는 속도에 따라 출력축의 회전변위에 대한 입력축의 목표 회전수변화율을 각각 설정하는 목표 회전수변화율 설정단계; 및
동기화 진행시, 출력축의 회전변위에 대한 입력축의 회전수변화율이 상기 목표 회전수변화율을 추종하면서 동기화되도록 피드백 제어하는 동기화단계;를 포함하는 자동화 수동변속기의 동기 제어방법. - 청구항 1 또는 청구항 2에 있어서,
상기 목표 회전수변화율 설정단계에서, 상기 전체 동기구간 중 초기의 동기구간과 말기의 동기구간은 중간의 동기구간보다 상기 목표 회전수변화율을 작게 설정하는 것을 특징으로 하는 자동화 수동변속기의 동기 제어방법. - 청구항 1 또는 청구항 2에 있어서,
상기 목표 회전수변화율 설정단계에서, 상기 전체 동기구간 중 말기의 동기구간은 나머지 동기구간보다 상기 목표 회전수변화율을 작게 설정하는 것을 특징으로 하는 자동화 수동변속기의 동기 제어방법. - 청구항 3에 있어서,
상기 목표 회전수변화율 설정단계에서, 상기 중간의 동기구간은 동기화가 진행되는 속도를 최대한 빠르게 설정하여 기어 변속시간을 단축하도록 한 것을 특징으로 하는 자동화 수동변속기의 동기 제어방법. - 청구항 2에 있어서,
상기 목표 회전수변화율 및 회전수변화율은, 동기장치의 슬립량 변화로 제어 가능한 것을 특징으로 하는 자동화 수동 변속기의 동기 제어방법.
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020120112795A KR101897295B1 (ko) | 2012-10-11 | 2012-10-11 | 자동화 수동변속기의 동기 제어방법 |
| JP2012259009A JP2014077533A (ja) | 2012-10-11 | 2012-11-27 | 自動化手動変速機の同期制御方法 |
| US13/714,097 US20140107901A1 (en) | 2012-10-11 | 2012-12-13 | Method for controlling synchronization of automated manual transmission |
| DE102012112638.0A DE102012112638A1 (de) | 2012-10-11 | 2012-12-19 | Verfahren zur Steuerung der Synchronisation eines automatisierten Handschaltgetriebes |
| FR1262437A FR2996894A1 (fr) | 2012-10-11 | 2012-12-20 | Procede pour commander la synchronisation d'une transmission manuelle automatisee |
| CN201210575432.6A CN103727222A (zh) | 2012-10-11 | 2012-12-26 | 用于控制自动手动变速器的同步的方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020120112795A KR101897295B1 (ko) | 2012-10-11 | 2012-10-11 | 자동화 수동변속기의 동기 제어방법 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20140046751A true KR20140046751A (ko) | 2014-04-21 |
| KR101897295B1 KR101897295B1 (ko) | 2018-10-22 |
Family
ID=50383097
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020120112795A Expired - Fee Related KR101897295B1 (ko) | 2012-10-11 | 2012-10-11 | 자동화 수동변속기의 동기 제어방법 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US20140107901A1 (ko) |
| JP (1) | JP2014077533A (ko) |
| KR (1) | KR101897295B1 (ko) |
| CN (1) | CN103727222A (ko) |
| DE (1) | DE102012112638A1 (ko) |
| FR (1) | FR2996894A1 (ko) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101849011B1 (ko) | 2016-10-24 | 2018-04-13 | 현대다이모스(주) | 자동화 수동변속기의 기어 액추에이터 초기 제어값 설정방법 |
| CN108278363B (zh) * | 2018-01-19 | 2019-12-27 | 吉林大学 | 一种带压力补偿的同步器转速同步过程控制方法 |
| CN109780200A (zh) * | 2018-12-29 | 2019-05-21 | 潍柴动力股份有限公司 | 用于amt变速箱的换挡方法 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR19980040594U (ko) * | 1996-12-23 | 1998-09-15 | 김영귀 | 차량용 수동변속기의 동기 제어장치 |
| JP2008501896A (ja) * | 2004-06-05 | 2008-01-24 | ツェットエフ、フリードリッヒスハーフェン、アクチエンゲゼルシャフト | 自動化手動変速機の制御方法 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE19711820A1 (de) * | 1996-08-08 | 1998-09-24 | Volkswagen Ag | Verfahren zum Schalten eines Doppelkupplungsgetriebes und Doppelkupplungsgetriebe |
| DE10135327A1 (de) * | 2001-07-19 | 2003-01-30 | Daimler Chrysler Ag | Automatisiertes Zahnräderwechselgetriebe und Verfahren zum Gangwechsel bei einem solchen |
| KR20120112795A (ko) | 2010-01-14 | 2012-10-11 | 마이클 슐로써 | 저준위 레이저 치료 또는 다른 광원 치료를 위한 스캐닝 메커니즘 및 처리 방법 |
-
2012
- 2012-10-11 KR KR1020120112795A patent/KR101897295B1/ko not_active Expired - Fee Related
- 2012-11-27 JP JP2012259009A patent/JP2014077533A/ja active Pending
- 2012-12-13 US US13/714,097 patent/US20140107901A1/en not_active Abandoned
- 2012-12-19 DE DE102012112638.0A patent/DE102012112638A1/de not_active Withdrawn
- 2012-12-20 FR FR1262437A patent/FR2996894A1/fr not_active Withdrawn
- 2012-12-26 CN CN201210575432.6A patent/CN103727222A/zh active Pending
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR19980040594U (ko) * | 1996-12-23 | 1998-09-15 | 김영귀 | 차량용 수동변속기의 동기 제어장치 |
| JP2008501896A (ja) * | 2004-06-05 | 2008-01-24 | ツェットエフ、フリードリッヒスハーフェン、アクチエンゲゼルシャフト | 自動化手動変速機の制御方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| FR2996894A1 (fr) | 2014-04-18 |
| KR101897295B1 (ko) | 2018-10-22 |
| US20140107901A1 (en) | 2014-04-17 |
| DE102012112638A1 (de) | 2014-04-17 |
| JP2014077533A (ja) | 2014-05-01 |
| CN103727222A (zh) | 2014-04-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101592695B1 (ko) | Dct차량의 변속 제어방법 | |
| KR101755818B1 (ko) | 전기차 변속기 | |
| KR101905916B1 (ko) | 자동화 수동변속기의 싱크스타트 탐색방법 | |
| KR101786126B1 (ko) | 변속기 장착 ev차량의 모터토크 제어방법 | |
| KR101316314B1 (ko) | 차량의 dct 제어방법 | |
| CN104279309B (zh) | 一种控制自动机械式变速箱中的同步器的方法和设备 | |
| US10077813B2 (en) | Shift control method for DCT vehicle | |
| US20050272559A1 (en) | Method for controlling the shifting of an automated twin-clutch transmission | |
| KR101294172B1 (ko) | Amt 하이브리드 차량의 변속제어 방법 | |
| JP2014055666A (ja) | Dct車両の変速制御方法 | |
| KR20140046751A (ko) | 자동화 수동변속기의 동기 제어방법 | |
| KR101887755B1 (ko) | Dct차량의 변속제어 방법 | |
| KR20190066674A (ko) | Dct 차량의 업쉬프트 제어방법 | |
| JP2012255541A (ja) | 車両変速機の制御方法 | |
| KR20130064916A (ko) | 시프트 바이 와이어용 변속시스템 | |
| WO2013026278A1 (zh) | 液压-机械传动的工程机械及其换挡控制系统和方法 | |
| KR101305866B1 (ko) | 차량의 변속기 제어방법 | |
| KR20140074545A (ko) | Dct 탑재 차량의 변속 제어방법 | |
| KR101755902B1 (ko) | 전기차 변속기 제어방법 | |
| KR101995952B1 (ko) | 차량용 자동 변속기의 파워 온 다운 쉬프트 학습 방법 | |
| KR101664545B1 (ko) | Amt의 변속 제어방법 및 장치 | |
| KR20170062842A (ko) | 차량의 정지전 다운 시프트 제어방법 | |
| CN106438995B (zh) | 一种在车辆传动系中实现换挡过程的方法 | |
| JP6241728B2 (ja) | ツインクラッチ式変速機の油圧制御装置 | |
| KR101806708B1 (ko) | 하이브리드 차량용 변속 제어방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
St.27 status event code: A-0-1-A10-A12-nap-PA0109 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-3-3-R10-R13-asn-PN2301 St.27 status event code: A-3-3-R10-R11-asn-PN2301 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| R15-X000 | Change to inventor requested |
St.27 status event code: A-3-3-R10-R15-oth-X000 |
|
| R16-X000 | Change to inventor recorded |
St.27 status event code: A-3-3-R10-R16-oth-X000 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-3-3-R10-R13-asn-PN2301 St.27 status event code: A-3-3-R10-R11-asn-PN2301 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-3-3-R10-R18-oth-X000 |
|
| A201 | Request for examination | ||
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-3-3-R10-R18-oth-X000 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| E13-X000 | Pre-grant limitation requested |
St.27 status event code: A-2-3-E10-E13-lim-X000 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| GRNT | Written decision to grant | ||
| PN2301 | Change of applicant |
St.27 status event code: A-5-5-R10-R13-asn-PN2301 St.27 status event code: A-5-5-R10-R11-asn-PN2301 |
|
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U11-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-5-5-R10-R18-oth-X000 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-5-5-R10-R18-oth-X000 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-5-5-R10-R13-asn-PN2301 St.27 status event code: A-5-5-R10-R11-asn-PN2301 |
|
| PC1903 | Unpaid annual fee |
St.27 status event code: A-4-4-U10-U13-oth-PC1903 Not in force date: 20210905 Payment event data comment text: Termination Category : DEFAULT_OF_REGISTRATION_FEE |
|
| PC1903 | Unpaid annual fee |
St.27 status event code: N-4-6-H10-H13-oth-PC1903 Ip right cessation event data comment text: Termination Category : DEFAULT_OF_REGISTRATION_FEE Not in force date: 20210905 |