KR20140052428A - 텔레메틱스 유닛의 can id 검출을 이용한 진단 충돌 회피 구현 장치 및 방법 - Google Patents
텔레메틱스 유닛의 can id 검출을 이용한 진단 충돌 회피 구현 장치 및 방법 Download PDFInfo
- Publication number
- KR20140052428A KR20140052428A KR1020120118511A KR20120118511A KR20140052428A KR 20140052428 A KR20140052428 A KR 20140052428A KR 1020120118511 A KR1020120118511 A KR 1020120118511A KR 20120118511 A KR20120118511 A KR 20120118511A KR 20140052428 A KR20140052428 A KR 20140052428A
- Authority
- KR
- South Korea
- Prior art keywords
- diagnostic
- external tester
- diagnosis
- tester equipment
- collision avoidance
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
- 238000000034 method Methods 0.000 title claims description 20
- 238000001514 detection method Methods 0.000 title abstract description 11
- 238000003745 diagnosis Methods 0.000 claims abstract description 34
- 238000004891 communication Methods 0.000 claims abstract description 11
- 230000000737 periodic effect Effects 0.000 claims description 7
- 238000004092 self-diagnosis Methods 0.000 description 8
- 230000006870 function Effects 0.000 description 6
- 238000005516 engineering process Methods 0.000 description 5
- 238000010586 diagram Methods 0.000 description 4
- 230000005856 abnormality Effects 0.000 description 2
- 230000005540 biological transmission Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000007792 addition Methods 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 238000010295 mobile communication Methods 0.000 description 1
Images


Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/02—Ensuring safety in case of control system failures, e.g. by diagnosing, circumventing or fixing failures
- B60W50/0205—Diagnosing or detecting failures; Failure detection models
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L12/00—Data switching networks
- H04L12/28—Data switching networks characterised by path configuration, e.g. LAN [Local Area Networks] or WAN [Wide Area Networks]
- H04L12/40—Bus networks
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W2050/0001—Details of the control system
- B60W2050/0002—Automatic control, details of type of controller or control system architecture
- B60W2050/0004—In digital systems, e.g. discrete-time systems involving sampling
- B60W2050/0006—Digital architecture hierarchy
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W2050/0001—Details of the control system
- B60W2050/0043—Signal treatments, identification of variables or parameters, parameter estimation or state estimation
- B60W2050/0044—In digital systems
- B60W2050/0045—In digital systems using databus protocols
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/02—Ensuring safety in case of control system failures, e.g. by diagnosing, circumventing or fixing failures
- B60W50/029—Adapting to failures or work around with other constraints, e.g. circumvention by avoiding use of failed parts
- B60W2050/0295—Inhibiting action of specific actuators or systems
Landscapes
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Human Computer Interaction (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Computer Networks & Wireless Communication (AREA)
- Signal Processing (AREA)
- Traffic Control Systems (AREA)
Abstract
본 발명에 따르면, 텔레메틱스 유닛의 CAN ID 검출을 이용하여 외부 테스터 장비와 충돌시 이를 사용자에게 즉각적으로 인지시키고 충돌을 방지하기 위해 진단 기능을 OFF 시킨다. 따라서 종래에 외부 테스터 장비 장착시 CAN ID를 공유함에 따라 발생하는 충돌 문제를 근본적으로 해결할 수 있다. 또한 구성 요소의 추가나 변경없이 CAN ID의 검출만으로 충돌 문제를 해결하므로 사용자에게 편리하고 경제성이 인정된다. 뿐만 아니라, 충돌이 발생하지 않으므로 안정적이고 신뢰할 수 있는 외부 테스터 장비 결과를 사용자에게 제공할 수 있다.
Description
도 2는 본 발명의 실시 예에 따른 진단 충돌 회피 구현 장치의 구성도.
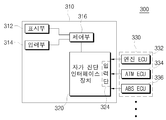
도 3은 본 발명의 실시 예에 따른 진단 충돌 회피 구현 방법의 순서도.
120 : 진단 충돌 구현 장치
122 : 진단부 124 : 판단부
126 : 제어부
Claims (8)
- 평시에는 CAN 통신을 이용하여 차량을 진단하는 진단부;
상기 CAN 통신에서 소정 범위 CAN ID 검출을 통해 외부 테스터 장비 장착 여부를 판단하는 판단부; 및
상기 판단부가 외부 테스터 장비 장착으로 판단하는 경우 상기 진단부를 OFF시키는 제어부
을 포함하는 진단 충돌 회피 구현 장치.
- 제1항에 있어서,
상기 진단부는
평시에는 CAN 통신을 이용하여 주기적 진단에 의해 상기 차량을 상시 진단하는 자동 진단, 사용자에 의해 상기 차량을 수동으로 진단하는 차량 진단 및 정기적으로 상기 차량을 진단하는 예약 진단 중 적어도 하나를 실행하는 것
인 진단 충돌 회피 구현 장치.
- 제1항에 있어서,
상기 판단부는
IGN OFF에서 IGN ON으로 스위칭 시점부터 소정 시간 이전의 경우 CAN 상에 소정 범위의 CAN ID가 검출되면 외부 테스터 장비 장착으로 판단하고,
상기 소정 시간 이후의 경우 상기 소정 범위와 상이한 특정 범위의 CAN ID가 검출되면 외부 테스터 장비 장착으로 판단하는 것
인 진단 충돌 회피 구현 장치.
- 제3항에 있어서,
상기 제어부는
상기 외부 테스터 장비 장착으로 판단시 상기 주기적 진단, 상기 차량 진단 및 상기 예상 진단 모두를 OFF 시키는 것
인 진단 충돌 회피 구현 장치.
- 소정 시간 이전의 경우 소정 범위의 CAN ID가 검출되면 외부 테스터 장비 장착으로 판단하는 단계; 및
상기 소정 시간 이후의 경우 상기 소정 범위와 상이한 특정 범위의 CAN ID가 검출되면 외부 테스터 장비 장착으로 판단하는 단계
상기 외부 테스터 장비 장착으로 판단한 경우 CAN 진단 기능을 OFF 시키는 단계
를 포함하는 진단 충돌 회피 구현 방법.
- 제5항에 있어서,
상기 소정 시간 이전의 경우 외부 테스터 장비 장착으로 판단하는 단계는
IGN OFF에서 IGN ON 스위칭 시점에서 소정 시간 동안 CAN 상에 0700H ~ 07FFH의 CAN ID가 감지되면 외부 테스터 장비 장착으로 판단하는 것
인 진단 충돌 회피 구현 방법.
- 제5항에 있어서,
상기 소정 시간 이후의 경우 외부 테스터 장비 장착으로 판단하는 단계는
상기 소정 시간 이후부터 IGN OFF 시점 동안 CAN 상에 07DF ~ 0x7C7의 CAN ID가 감지되면 외부 테스터 장비 장착으로 판단하는 것
인 진단 충돌 회피 구현 방법.
- 제5항에 있어서,
상기 CAN 진단 기능을 OFF 시키는 단계는
주기적 자동 진단, 수동 진단 및 정기 진단 모두를 OFF시키는 것
인 진단 충돌 회피 구현 방법.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020120118511A KR20140052428A (ko) | 2012-10-24 | 2012-10-24 | 텔레메틱스 유닛의 can id 검출을 이용한 진단 충돌 회피 구현 장치 및 방법 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020120118511A KR20140052428A (ko) | 2012-10-24 | 2012-10-24 | 텔레메틱스 유닛의 can id 검출을 이용한 진단 충돌 회피 구현 장치 및 방법 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20140052428A true KR20140052428A (ko) | 2014-05-07 |
Family
ID=50885664
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020120118511A Ceased KR20140052428A (ko) | 2012-10-24 | 2012-10-24 | 텔레메틱스 유닛의 can id 검출을 이용한 진단 충돌 회피 구현 장치 및 방법 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR20140052428A (ko) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3942912A1 (en) | 2014-04-30 | 2022-01-26 | LG Electronics Inc. | Lawn mower robot and control method thereof |
-
2012
- 2012-10-24 KR KR1020120118511A patent/KR20140052428A/ko not_active Ceased
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3942912A1 (en) | 2014-04-30 | 2022-01-26 | LG Electronics Inc. | Lawn mower robot and control method thereof |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN104620530B (zh) | 用于执行车辆的安全功能的方法和执行该方法的系统 | |
| JP3721089B2 (ja) | 車両診断システム及び該システムを用いた自動車 | |
| KR100742147B1 (ko) | 차량 진단방법, 차량 진단 시스템, 차량 및 센터 | |
| US20030107548A1 (en) | System and method for executing diagnosis of vehicle performance | |
| KR102429017B1 (ko) | 차량 검사 시스템 및 그 방법 | |
| US11348495B2 (en) | Image display system for vehicle | |
| US20150039174A1 (en) | Vehicular Communication Device and Communication Management System | |
| US11208161B2 (en) | Vehicle system | |
| KR20150117561A (ko) | 자동차 충돌 감지시스템 및 처리방법 | |
| KR20120129053A (ko) | 무선통신망을 이용한 차량 진단 시스템 및 그 진단방법 | |
| KR100205974B1 (ko) | 원격고객차량 관리장치 및 그 제어방법 | |
| CN110466450B (zh) | 汽车安全检测系统 | |
| JP3965772B2 (ja) | 車両用故障診断装置 | |
| US20100082199A1 (en) | Failure determination apparatus for vehicle, failure determination method and computer readable medium for failure determination | |
| KR101297024B1 (ko) | 캔통신을이용한 자동차 고장진단 네트워크 시스템 및 방법 | |
| KR101145556B1 (ko) | 무선 통신망을 이용한 자동차 진단 시스템 및 그 방법 | |
| KR20110071596A (ko) | 자동차 전자제어유닛의 상태 자동 진단 시스템 | |
| KR100980973B1 (ko) | 무선통신을 이용한 차량고장진단 시스템 및 그 방법 | |
| KR20140052428A (ko) | 텔레메틱스 유닛의 can id 검출을 이용한 진단 충돌 회피 구현 장치 및 방법 | |
| KR101053722B1 (ko) | 텔레매틱스 장치를 이용한 자동차 자가진단 시스템 및 그방법 | |
| KR20040011230A (ko) | 자동진단 기능을 갖는 자동차용 텔레매틱스 장치 및 이를이용한 자동차의 자동진단 방법 | |
| KR100499944B1 (ko) | 텔레매틱스 장치를 이용한 자동차용 자가진단 시스템 | |
| KR101382498B1 (ko) | 자동차 에어백 동작 감지시스템 및 처리방법 | |
| KR100374153B1 (ko) | 자동차 원격 진단/제어시스템 및 그 제어방법 | |
| KR20080036296A (ko) | 차량 진단 장치에서의 캔 아이디 충돌 방지 방법 및 장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
Patent event code: PA01091R01D Comment text: Patent Application Patent event date: 20121024 |
|
| PG1501 | Laying open of application | ||
| A201 | Request for examination | ||
| PA0201 | Request for examination |
Patent event code: PA02012R01D Patent event date: 20171023 Comment text: Request for Examination of Application Patent event code: PA02011R01I Patent event date: 20121024 Comment text: Patent Application |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20181219 Patent event code: PE09021S01D |
|
| E601 | Decision to refuse application | ||
| PE0601 | Decision on rejection of patent |
Patent event date: 20190303 Comment text: Decision to Refuse Application Patent event code: PE06012S01D Patent event date: 20181219 Comment text: Notification of reason for refusal Patent event code: PE06011S01I |