KR20140052524A - 환자의 자세 변화에 따른 의료 영상을 보정하는 방법, 장치 및 시스템 - Google Patents
환자의 자세 변화에 따른 의료 영상을 보정하는 방법, 장치 및 시스템 Download PDFInfo
- Publication number
- KR20140052524A KR20140052524A KR1020120118674A KR20120118674A KR20140052524A KR 20140052524 A KR20140052524 A KR 20140052524A KR 1020120118674 A KR1020120118674 A KR 1020120118674A KR 20120118674 A KR20120118674 A KR 20120118674A KR 20140052524 A KR20140052524 A KR 20140052524A
- Authority
- KR
- South Korea
- Prior art keywords
- real
- image
- time image
- subject
- marker
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images












Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/70—Determining position or orientation of objects or cameras
- G06T7/73—Determining position or orientation of objects or cameras using feature-based methods
- G06T7/74—Determining position or orientation of objects or cameras using feature-based methods involving reference images or patches
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T1/00—General purpose image data processing
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/30—Determination of transform parameters for the alignment of images, i.e. image registration
- G06T7/33—Determination of transform parameters for the alignment of images, i.e. image registration using feature-based methods
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10004—Still image; Photographic image
- G06T2207/10012—Stereo images
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10068—Endoscopic image
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10072—Tomographic images
- G06T2207/10081—Computed x-ray tomography [CT]
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10072—Tomographic images
- G06T2207/10088—Magnetic resonance imaging [MRI]
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30004—Biomedical image processing
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30204—Marker
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Apparatus For Radiation Diagnosis (AREA)
- Health & Medical Sciences (AREA)
- General Health & Medical Sciences (AREA)
- Medical Informatics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Radiology & Medical Imaging (AREA)
- Quality & Reliability (AREA)
Abstract
Description
도 2 는 본 발명의 일 실시예에 따른 마커의 일 예를 도시한 도면이다.
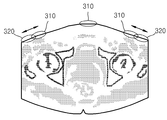
도 3은 본 발명의 일 실시예에 따른 피검자의 자세가 제 1 자세에서 제 2 자세로 변경됨에 따라 마커가 이동한 일 예를 도시한 도면이다.
도 4a 내지 4b는 본 발명의 일 실시예에 따른 제 1 위치 관계 특정부 및 제 2 위치 관계 특정부가 동작하는 일 예를 도시한 도면이다.
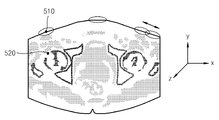
도 5a는 제 1 위치 관계 특정부가 제 1 실시간 영상 상에서 지점과 마커의 위치를 좌표로 표현하는 과정의 일 예를 도시한 도면이다.
도 5b는 본 발명의 일 실시예에 따른 이동량 및 이동 방향 산출부가 동작하는 일 예를 도시한 도면이다.
도 6은 본 발명의 일 실시예에 따른 영상 보정 시스템의 다른 예를 도시한 도면이다.
도 7은 본 발명의 일 실시예에 따른 영상 보정 시스템의 사용 환경의 다른 예를 도시한 도면이다.
도 8은 본 발명의 일 실시예에 따른 영상 처리 장치에서 영상을 보정하는 일 예를 나타내는 흐름도이다.
도 9는 본 발명의 일 실시예에 따른 영상 처리 장치에서 영상을 보정하는 다른 예를 나타내는 흐름도이다.
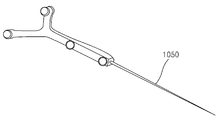
도 10a 내지 도 10b는 보정 패턴 및 위치 측정 장치의 지시자의 일 예를 도시한 도면이다.
도 11은 삼각측량 방식의 일 예를 도시한 도면이다.
도 12는 보정 패턴에 대한 영상을 이용하여 제 4 촬상 장치를 캘리브레이션 하는 일 예를 도시한 도면이다.
도 13은 제 4 촬상 장치가 캘리브레이션과 교정을 수행한 후, 제 4 촬상 장치에 포함된 좌측 및 우측 카메라의 x 좌표가 가로 방향으로 일치된 결과를 도시한 도면이다.
도 14는 위치 측정 장치 및 제 4 촬상 장치의 일 예를 도시한 도면이다.




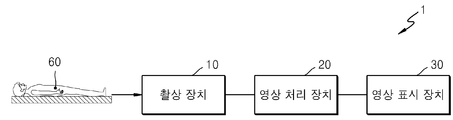
20: 영상 처리 장치
210: 영상 생성부
220: 이동 정보 획득부
230: 영상 보정부
Claims (25)
- 피검자에 마커(marker)를 부착하고, 상기 피검자가 제 1 자세를 취한 상태에서 상기 마커를 부착한 위치를 포함하는 주변 부위에 대한 상기 피검자의 해부학적 정보가 포함된 제 1 비 실시간 영상 및 제 1 실시간 영상을 생성하는 단계;
상기 피검자가 제 2 자세를 취한 상태에서 상기 주변 부위에 대한 상기 피검자의 제 2 실시간 영상을 생성하는 단계;
상기 제 1 실시간 영상 및 제 2 실시간 영상을 이용하여 상기 제 1 자세에서 상기 제 2 자세로 변경됨에 따라 상기 마커가 이동한 정보를 획득하는 단계; 및
상기 마커의 이동 정보를 반영하여 상기 제 1 비 실시간 영상을 보정하는 단계;를 포함하는 영상을 보정하는 방법. - 제 1 항에 있어서,
상기 마커가 이동한 정보를 획득하는 단계는
상기 제 1 실시간 영상에 포함된 데이터들에서 측정한 값이 임계치를 초과하는 지점을 결정하고, 상기 결정된 지점과 상기 마커간의 제 1 위치 관계를 특정하는 단계;
상기 제 2 실시간 영상 상에서 상기 제 1 실시간 영상에서 결정한 상기 지점과 대응되는 지점을 선택하고, 상기 선택된 지점과 상기 마커간의 제 2 위치 관계를 특정하는 단계; 및
상기 제 1 위치 관계 및 상기 제 2 위치 관계를 이용하여 상기 피검자가 자세를 변경함에 따라 상기 마커가 이동한 방향 및 이동량을 산출하는 단계;인 방법. - 제 2 항에 있어서,
상기 임계값을 초과하는 지점은 상기 제 1 또는 상기 제 2 실시간 영상에 포함된 체내 조직들 중에서 상기 피검자의 자세 변화에 무관하게 고정된 위치를 갖는 조직에서 선택한 지점이고,
상기 제 1 위치 관계 또는 제 2 위치 관계는 상기 제 1 또는 상기 제 2 실시간 영상 상에서 상기 지점과 상기 마커의 위치를 좌표로 표현하여 나타낸 관계인 방법. - 제 3 항에 있어서,
상기 지점은 상기 제 1 또는 상기 제 2 실시간 영상 상에서 상기 고정된 위치를 갖는 조직의 외곽면을 분리(segmentation)하고, 상기 분리된 외곽면에서 선택한 지점인 방법. - 제 1 항에 있어서,
상기 피검자가 제 2 자세를 취한 상태에서 상기 피검자의 체내에 삽입한 촬상 장치를 이용하여 상기 피검자의 주변 부위에 대한 해부학적 정보가 포함된 제 3 실시간 영상을 생성하는 단계를 더 포함하고,
상기 제 1 비 실시간 영상, 상기 제 1 실시간 영상 및 상기 제 2 실시간 영상은 상기 피검자의 체외에 구비된 촬상 장치를 이용하여 생성한 영상인 방법. - 제 5 항에 있어서,
상기 촬상 장치와 상기 마커간의 제 3 위치 관계를 파악하고, 상기 제 3 위치 관계를 이용하여 상기 제 3 실시간 영상과 상기 보정된 영상을 중첩시키는 단계를 더 포함하는 방법. - 제 1 항에 있어서,
상기 제 1 비 실시간 영상은 CT, MR, SPECT, PET 영상 중 어느 하나이고, 상기 제 1 실시간 영상 및 상기 제 2 실시간 영상은 초음파, PAT, X-ray 영상 중 어느 하나인 방법. - 제 1 항에 있어서,
상기 마커는 상기 제 1 비 실시간 영상, 제 1 내지 제 2 실시간 영상들에서 식별 가능하고, 상기 피검자의 외부에서도 식별 가능한 부분을 포함하는 것을 특징으로 하는 방법. - 제 1 항에 있어서,
상기 보정된 제 1 비 실시간 영상 및 제 1 비 실시간 영상에 다수의 포인트들을 설정하고, 상기 보정된 제 1 비 실시간 영상 및 제 1 비 실시간 영상에서 서로 대응되는 위치에 설정된 포인트 간의 거리를 측정하여 소정의 오차 값 이하에 해당되는지를 판단하는 단계를 더 포함하는 방법. - 제 1 항 내지 제 9 항 중에 어느 한 항의 방법을 컴퓨터에서 실행시키기 위한 프로그램으로 기록한 컴퓨터로 읽을 수 있는 기록매체.
- 마커(marker)를 부착한 피검자가 제 1 자세를 취한 상태에서 상기 마커를 부착한 위치를 포함하는 주변 부위에 대한 상기 피검자의 해부학적 정보가 포함된 제 1 비 실시간 영상을 생성하는 제 1 영상 생성부;
상기 피검자가 제 1 자세를 취한 상태에서 상기 주변 부위에 대한 상기 피검자의 해부학적 정보가 포함된 제 1 실시간 영상을 생성하는 제 2 영상 생성부;
상기 피검자가 제 2 자세를 취한 상태에서 상기 주변 부위에 대한 상기 피검자의 제 2 실시간 영상을 생성하는 제 3 영상 생성부;
상기 제 1 실시간 영상 및 제 2 실시간 영상을 이용하여 상기 제 1 자세에서 상기 제 2 자세로 변경됨에 따라 상기 마커가 이동한 정보를 획득하는 이동 정보 획득부; 및
상기 마커의 이동 정보를 반영하여 상기 제 1 비 실시간 영상을 보정하는 영상 보정부;를 포함하는 영상을 보정하는 장치. - 제 11 항에 있어서,
상기 이동 정보 획득부는
상기 제 1 실시간 영상에 포함된 데이터들에서 측정한 값이 임계값을 초과하는 지점을 결정하고, 상기 결정된 지점과 상기 마커간의 제 1 위치 관계를 특정하는 제 1 위치 관계 특정부;
상기 제 2 실시간 영상 상에서 상기 제 1 실시간 영상에서 특정한 상기 소정의 지점과 대응되는 지점을 결정하고, 상기 결정된 지점과 상기 마커간의 제 2 위치 관계를 특정하는 제 2 위치 관계 특정부; 및
상기 제 1 위치 관계 및 상기 제 2 위치 관계를 이용하여 상기 피검자가 자세를 변경함에 따라 상기 마커가 이동한 방향 및 이동량을 획득하는 획득부;인 장치. - 제 12 항에 있어서,
상기 임계값을 초과하는 지점은 상기 제 1 또는 상기 제 2 실시간 영상에 포함된 체내 조직들 중에서 상기 피검자의 자세 변화에 무관하게 고정된 위치를 갖는 조직에서 선택한 지점이고,
상기 제 1 위치 관계 또는 제 2 위치 관계는 상기 제 1 또는 상기 제 2 실시간 영상 상에서 상기 지점과 상기 마커의 위치를 좌표로 표현하여 나타낸 관계인 장치. - 제 13 항에 있어서,
상기 지점은 상기 제 1 또는 상기 제 2 실시간 영상 상에서 상기 고정된 위치를 갖는 조직의 외곽면을 분리(segmentation)하고, 상기 분리된 외곽면에서 선택한 지점인 장치. - 제 11 항에 있어서,
상기 피검자가 제 2 자세를 취한 상태에서 상기 피검자의 체내에 삽입한 촬상 장치를 이용하여 상기 피검자의 주변 부위에 대한 해부학적 정보가 포함된 제 3 실시간 영상을 생성하는 제 4 영상 생성부를 더 포함하고,
상기 제 1 비 실시간 영상, 상기 제 1 실시간 영상 및 상기 제 2 실시간 영상은 상기 피검자의 체외에 구비된 촬상 장치를 이용하여 생성한 영상들인 장치. - 제 15 항에 있어서,
상기 촬상 장치와 상기 마커간의 제 3 위치 관계를 특정하고, 상기 제 3 위치 관계를 이용하여 상기 제 3 실시간 영상과 상기 보정된 영상을 중첩하는 영상 중첩부;를 더 포함하는 장치. - 제 11 항에 있어서,
상기 제 1 비 실시간 영상은 CT, MR, SPECT, PET 영상 중 어느 하나이고, 상기 제 1 실시간 영상 및 상기 제 2 실시간 영상은 초음파, PAT, X-ray 영상 중 어느 하나인 장치. - 제 11 항에 있어서,
상기 마커는 상기 제 1 비 실시간 영상, 제 1 내지 제 2 실시간 영상들에서 식별 가능하고, 상기 피검자의 외부에서도 식별 가능한 부분을 포함하는 것을 특징으로 하는 장치. - 제 11 항에 있어서,
상기 영상 보정부는
상기 보정된 제 1 비 실시간 영상 및 제 1 비 실시간 영상에 다수의 포인트들을 설정하고, 상기 보정된 제 1 비 실시간 영상 및 제 1 비 실시간 영상에서 서로 대응되는 위치에 설정된 포인트 간의 거리를 측정하여 소정의 오차 값 이하에 해당되는지를 판단하는 평가부;를 더 포함하는 장치. - 마커(marker)를 부착한 피검자의 해부학적 정보가 포함된 제 1 비 실시간 영상, 제 1 내지 제 3 실시간 영상을 생성하는 하나 이상의 촬상 장치;
상기 촬상 장치로부터 생성된 상기 피검자의 제 1 실시간 영상 및 제 2 실시간 영상을 이용하여 상기 마커의 이동 정보를 획득하고, 상기 마커의 이동 정보를 반영하여 제 1 비 실시간 영상을 보정하는 영상 처리 장치;를 포함하는 영상 보정 시스템. - 촬상 장치로부터 피사체까지의 거리를 측정하는 방법에 있어서,
피사체를 포함하는 두 개 이상의 영상들을 획득하는 단계;
상기 영상들을 기초로 삼각 측량(tiangulation)을 수행하여 상기 촬상 장치로부터 상기 피사체까지의 제 1 거리를 계산하는 단계;
상기 렌즈들의 캘리브레이션(calibration) 및 상기 영상들의 교정(rectification)을 수행한 후 상기 촬상 장치로부터 상기 피사체까지의 제 2 거리를 계산하는 단계;
상기 제 1 거리 및 제 2 거리를 이용하여, 상기 제 2 거리와 상기 촬상 장치로부터 상기 피사체까지의 실제 거리 간의 차이를 보정(compensation)하는 단계;를 포함하는 방법. - 제 21 항에 있어서,
상기 두 개 이상의 영상들은
상기 촬상 장치에 포함된 하나 이상의 렌즈를 통해서 생성한 영상들인 방법. - 제 21 항에 있어서,
상기 보정하는 단계는
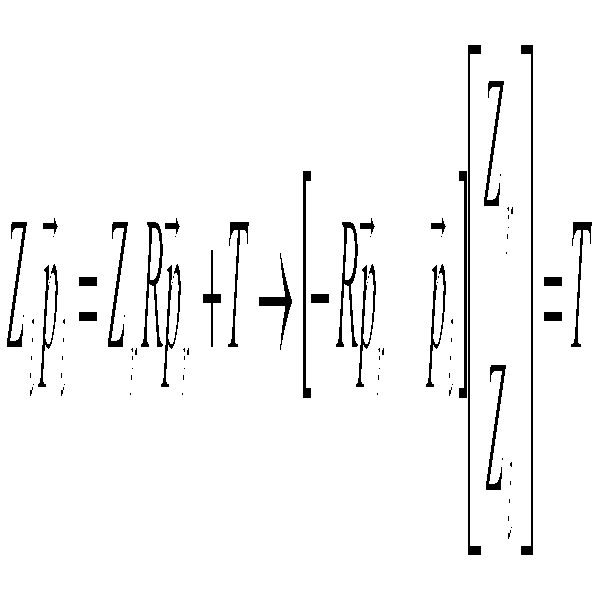
상기 제 1 거리 및 상기 제 2 거리 각각에 대응하는 상기 피사체의 위치를 나타내는 좌표들을 이용하여 로테이션 행렬(rotation matrix) 및 변환 벡터(translation vector)를 계산하는 단계; 및
상기 계산된 로테이션 행렬(rotation matrix) 및 변환 벡터(translation vector)를 반영하여 상기 제 2 거리에 대응하는 상기 피사체의 위치를 나타내는 좌표를 갱신하는 단계인 방법. - 제 23항에 있어서,
상기 계산하는 단계는
상기 제 1 거리에 대응하는 상기 피사체의 위치를 나타내는 좌표 및 상기 제 2 거리에 대응하는 상기 피사체의 위치를 나타내는 좌표를 기초로 특이값 분해(Singular Value Decomposition)를 적용하여 상기 로테이션 행렬(rotation matrix) 및 상기 변환 벡터(translation vector)를 계산하는 방법. - 제 21항에 있어서,
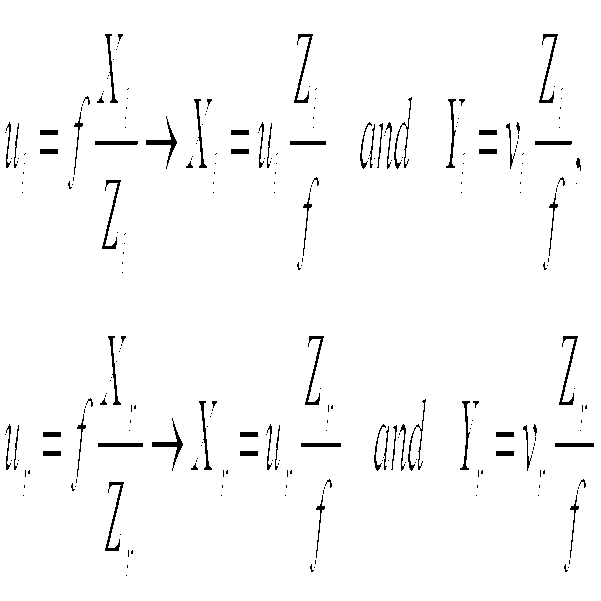
상기 제 1 거리 및 상기 제 2 거리는
상기 렌즈들의 중심을 원점으로 한 상기 렌즈들 각각의 좌표축을 설정하고, 상기 피사체의 위치를 상기 좌표축을 기초로 한 좌표 성분으로 나타낸 것을 특징으로 하는 방법.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020120118674A KR101993384B1 (ko) | 2012-10-24 | 2012-10-24 | 환자의 자세 변화에 따른 의료 영상을 보정하는 방법, 장치 및 시스템 |
| US13/861,778 US9437003B2 (en) | 2012-10-24 | 2013-04-12 | Method, apparatus, and system for correcting medical image according to patient's pose variation |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020120118674A KR101993384B1 (ko) | 2012-10-24 | 2012-10-24 | 환자의 자세 변화에 따른 의료 영상을 보정하는 방법, 장치 및 시스템 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20140052524A true KR20140052524A (ko) | 2014-05-07 |
| KR101993384B1 KR101993384B1 (ko) | 2019-06-26 |
Family
ID=50485367
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020120118674A Active KR101993384B1 (ko) | 2012-10-24 | 2012-10-24 | 환자의 자세 변화에 따른 의료 영상을 보정하는 방법, 장치 및 시스템 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US9437003B2 (ko) |
| KR (1) | KR101993384B1 (ko) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20220105723A (ko) * | 2021-01-20 | 2022-07-28 | 재단법인 아산사회복지재단 | 인공 신경망 기반의 의료 영상 분석 장치, 방법 및 이의 학습 방법 |
| WO2025053296A1 (ko) * | 2023-09-04 | 2025-03-13 | 프로메디우스 주식회사 | 인공 신경망 기반의 의료 영상 분석 장치, 방법 및 이의 학습 방법 |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9386908B2 (en) * | 2013-01-29 | 2016-07-12 | Gyrus Acmi, Inc. (D.B.A. Olympus Surgical Technologies America) | Navigation using a pre-acquired image |
| WO2018045551A1 (en) * | 2016-09-09 | 2018-03-15 | Intel Corporation | Training and deploying pose regressions in neural networks in autonomous machines |
| TWI670681B (zh) | 2017-06-04 | 2019-09-01 | 鈦隼生物科技股份有限公司 | 判定手術路徑上一個或多個點之方法和系統 |
| US11998279B2 (en) * | 2018-08-01 | 2024-06-04 | Brain Navi Biotechnology Co., Ltd. | Method and system of tracking patient position in operation |
| CN111311632B (zh) * | 2018-12-11 | 2023-12-01 | 深圳市优必选科技有限公司 | 一种物体位姿跟踪方法、装置及设备 |
| TWI766253B (zh) * | 2019-03-19 | 2022-06-01 | 鈦隼生物科技股份有限公司 | 基於影像匹配決定手術路徑之方法與系統 |
| EP3933760A4 (en) * | 2019-06-07 | 2022-12-07 | Mayekawa Mfg. Co., Ltd. | IMAGE PROCESSING DEVICE, IMAGE PROCESSING PROGRAM AND IMAGE PROCESSING METHOD |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003308514A (ja) * | 1997-09-01 | 2003-10-31 | Canon Inc | 情報処理方法及び情報処理装置 |
| KR20060065990A (ko) * | 2004-12-11 | 2006-06-15 | 삼성전자주식회사 | 자세 교정 장치 및 그 방법 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5873827A (en) | 1996-12-23 | 1999-02-23 | Russell; Donald G. | Surface marker for ultrasound examination and a method for using the marker |
| US6119033A (en) * | 1997-03-04 | 2000-09-12 | Biotrack, Inc. | Method of monitoring a location of an area of interest within a patient during a medical procedure |
| US6490475B1 (en) * | 2000-04-28 | 2002-12-03 | Ge Medical Systems Global Technology Company, Llc | Fluoroscopic tracking and visualization system |
| DE10333543A1 (de) * | 2003-07-23 | 2005-02-24 | Siemens Ag | Verfahren zur gekoppelten Darstellung intraoperativer sowie interaktiv und iteraktiv re-registrierter präoperativer Bilder in der medizinischen Bildgebung |
| JP4348310B2 (ja) | 2004-09-30 | 2009-10-21 | ジーイー・メディカル・システムズ・グローバル・テクノロジー・カンパニー・エルエルシー | 超音波イメージング装置、画像処理装置およびプログラム |
| US10555775B2 (en) | 2005-05-16 | 2020-02-11 | Intuitive Surgical Operations, Inc. | Methods and system for performing 3-D tool tracking by fusion of sensor and/or camera derived data during minimally invasive robotic surgery |
| CN101394791A (zh) | 2006-03-09 | 2009-03-25 | 画像诊断株式会社 | 医用图像的处理方法 |
| WO2008009136A1 (en) | 2006-07-21 | 2008-01-24 | Orthosoft Inc. | Non-invasive tracking of bones for surgery |
| JP4309936B2 (ja) | 2007-01-05 | 2009-08-05 | オリンパスメディカルシステムズ株式会社 | 超音波診断装置 |
| KR101662323B1 (ko) | 2010-05-28 | 2016-10-04 | 가천의과학대학교 산학협력단 | 의료 영상 장치용 3축 움직임 추적 장치 및 이를 이용한 의료 영상 보정 방법 |
| US8675939B2 (en) * | 2010-07-13 | 2014-03-18 | Stryker Leibinger Gmbh & Co. Kg | Registration of anatomical data sets |
| JP5661382B2 (ja) | 2010-08-31 | 2015-01-28 | キヤノン株式会社 | 画像表示装置 |
| EP2587450B1 (en) * | 2011-10-27 | 2016-08-31 | Nordson Corporation | Method and apparatus for generating a three-dimensional model of a region of interest using an imaging system |
-
2012
- 2012-10-24 KR KR1020120118674A patent/KR101993384B1/ko active Active
-
2013
- 2013-04-12 US US13/861,778 patent/US9437003B2/en not_active Expired - Fee Related
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003308514A (ja) * | 1997-09-01 | 2003-10-31 | Canon Inc | 情報処理方法及び情報処理装置 |
| KR20060065990A (ko) * | 2004-12-11 | 2006-06-15 | 삼성전자주식회사 | 자세 교정 장치 및 그 방법 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20220105723A (ko) * | 2021-01-20 | 2022-07-28 | 재단법인 아산사회복지재단 | 인공 신경망 기반의 의료 영상 분석 장치, 방법 및 이의 학습 방법 |
| WO2025053296A1 (ko) * | 2023-09-04 | 2025-03-13 | 프로메디우스 주식회사 | 인공 신경망 기반의 의료 영상 분석 장치, 방법 및 이의 학습 방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20140112529A1 (en) | 2014-04-24 |
| US9437003B2 (en) | 2016-09-06 |
| KR101993384B1 (ko) | 2019-06-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101993384B1 (ko) | 환자의 자세 변화에 따른 의료 영상을 보정하는 방법, 장치 및 시스템 | |
| US11883118B2 (en) | Using augmented reality in surgical navigation | |
| US20220192611A1 (en) | Medical device approaches | |
| JP6395995B2 (ja) | 医療映像処理方法及び装置 | |
| US9498132B2 (en) | Visualization of anatomical data by augmented reality | |
| CA2617313C (en) | A method and a system for registering a 3d pre-acquired image coordinates system with a medical positioning system coordinate system and with a 2d image coordinate system | |
| CN117677358A (zh) | 用于手术期间现场x射线荧光透视和c形臂计算机断层扫描成像的立体投影和交叉参考的增强现实系统和方法 | |
| US20150371390A1 (en) | Three-Dimensional Image Segmentation Based on a Two-Dimensional Image Information | |
| EP3338246A1 (en) | Registration of video camera with medical imaging | |
| WO2013141155A1 (ja) | 画像内遮蔽領域の画像補完システム、画像処理装置及びそのプログラム | |
| JP2022517246A (ja) | 超音波像とx線像とを融合させるための実時間追跡 | |
| US11941765B2 (en) | Representation apparatus for displaying a graphical representation of an augmented reality | |
| KR102233585B1 (ko) | 복수의 후보 대응점을 이용하는 영상 정합 장치 및 방법 | |
| US12605207B2 (en) | System for displaying an augmented reality and method for generating an augmented reality | |
| US12402955B2 (en) | Extended-reality visualization of endovascular navigation | |
| KR20160057024A (ko) | 마커리스 3차원 객체추적 장치 및 그 방법 | |
| KR102184001B1 (ko) | 수술용 네비게이션을 위한 영상 정합 장치 및 영상 정합 방법 | |
| Stolka et al. | A 3D-elastography-guided system for laparoscopic partial nephrectomies | |
| JP6795744B2 (ja) | 医療支援方法および医療支援装置 | |
| Kumar et al. | Stereoscopic augmented reality for single camera endoscope using optical tracker: a study on phantom | |
| Suzuki et al. | A real-time data fusion system updating 3D organ shapes using color information from |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
Patent event code: PA01091R01D Comment text: Patent Application Patent event date: 20121024 |
|
| PG1501 | Laying open of application | ||
| A201 | Request for examination | ||
| PA0201 | Request for examination |
Patent event code: PA02012R01D Patent event date: 20170324 Comment text: Request for Examination of Application Patent event code: PA02011R01I Patent event date: 20121024 Comment text: Patent Application |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20181116 Patent event code: PE09021S01D |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
Patent event code: PE07011S01D Comment text: Decision to Grant Registration Patent event date: 20190328 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
Comment text: Registration of Establishment Patent event date: 20190620 Patent event code: PR07011E01D |
|
| PR1002 | Payment of registration fee |
Payment date: 20190621 End annual number: 3 Start annual number: 1 |
|
| PG1601 | Publication of registration | ||
| PR1001 | Payment of annual fee |
Payment date: 20220518 Start annual number: 4 End annual number: 4 |
|
| PR1001 | Payment of annual fee |
Payment date: 20230518 Start annual number: 5 End annual number: 5 |