KR20140053149A - 피호출자 검색 기법 - Google Patents
피호출자 검색 기법 Download PDFInfo
- Publication number
- KR20140053149A KR20140053149A KR1020147002561A KR20147002561A KR20140053149A KR 20140053149 A KR20140053149 A KR 20140053149A KR 1020147002561 A KR1020147002561 A KR 1020147002561A KR 20147002561 A KR20147002561 A KR 20147002561A KR 20140053149 A KR20140053149 A KR 20140053149A
- Authority
- KR
- South Korea
- Prior art keywords
- robot
- person
- location
- module
- target person
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0231—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means
- G05D1/0246—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using a video camera in combination with image processing means
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/20—Control system inputs
- G05D1/24—Arrangements for determining position or orientation
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V40/00—Recognition of biometric, human-related or animal-related patterns in image or video data
- G06V40/10—Human or animal bodies, e.g. vehicle occupants or pedestrians; Body parts, e.g. hands
- G06V40/16—Human faces, e.g. facial parts, sketches or expressions
- G06V40/161—Detection; Localisation; Normalisation
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N7/00—Television systems
- H04N7/18—Closed-circuit television [CCTV] systems, i.e. systems in which the video signal is not broadcast
- H04N7/183—Closed-circuit television [CCTV] systems, i.e. systems in which the video signal is not broadcast for receiving images from a single remote source
- H04N7/185—Closed-circuit television [CCTV] systems, i.e. systems in which the video signal is not broadcast for receiving images from a single remote source from a mobile camera, e.g. for remote control
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0231—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means
- G05D1/0238—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using obstacle or wall sensors
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0268—Control of position or course in two dimensions specially adapted to land vehicles using internal positioning means
- G05D1/0274—Control of position or course in two dimensions specially adapted to land vehicles using internal positioning means using mapping information stored in a memory device
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- General Health & Medical Sciences (AREA)
- Radar, Positioning & Navigation (AREA)
- Human Computer Interaction (AREA)
- Health & Medical Sciences (AREA)
- Signal Processing (AREA)
- Theoretical Computer Science (AREA)
- Aviation & Aerospace Engineering (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Remote Sensing (AREA)
- Automation & Control Theory (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Electromagnetism (AREA)
- Manipulator (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Abstract
Description
도 2는 로컬 사용자와 원거리 사용자 사이에서의 로보틱 텔레프레전스 세션을 도시한 도면;
도 3은 로봇의 환경에 있는 사람의 위치를 찾아서 통신을 위한 로보틱 텔레프레전스 세션을 확립하는 방법을 도시한 개괄적 도면;
도 4a 및 4b는 로봇의 환경에 있는 사람의 위치를 찾아서 통신을 위한 로보틱 텔레프레전스 세션을 요청하는 방법의 더욱 상세한 예시를 제공하는 블록도;
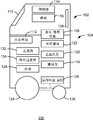
도 5는 위치추적 기능을 수행하도록 사용될 수 있는 모듈을 나타내는 로봇의 블록도.
Claims (10)
- 로봇을 이용하여 환경 내에 있는 사람과의 텔레프레전스 세션(telepresence session)을 진행하는 시스템으로서,
상기 로봇을 상기 환경에서 이동시키도록 구성된 모터와,
카메라 및 마이크로폰을 포함하는 센서 시스템과,
로봇에 대한 모듈을 구현하도록 구성된 프로세서를 포함하되,
상기 모듈은,
상기 로봇을 상기 환경에서 이동시키도록 구성된 네비게이션 모듈과,
상기 카메라로부터의 이미지 내에 얼굴이 존재하는지를 식별하도록 구성된 얼굴 인식 모듈과,
상기 환경 내에 있는 타겟 인물(target person)의 위치를 찾기 위해서 상기 타겟 인물의 지정(designation)을 수락하고, 상기 얼굴 인식 모듈 또는 상기 네비게이션 모듈, 또는 이들의 임의의 조합으로부터의 데이터를 이용하도록 구성된 사람 위치추적 모듈(person location module)
을 포함하는
시스템.
- 제 1 항에 있어서,
상기 카메라에 의해 검출된 모션의 위치를 찾도록 구성된 모션 검출 시스템을 포함하는
시스템.
- 제 1 항에 있어서,
상기 마이크로폰에 의해 검출된 사운드의 위치를 찾도록 구성된 사운드 소스 위치추적 모듈을 포함하는
시스템.
- 제 1 항에 있어서,
상기 사람 위치추적 모듈은 원거리 사용자에게 검색 상황을 제공하도록 구성되는
시스템.
- 타겟 인물의 위치를 찾기 위해 자율적인 로봇을 이용하여 상기 타겟 인물과의 텔레프레전스 세션을 개시하는 방법으로서,
상기 로봇에서 텔레프레전스 세션을 호스팅하라는 요청을 수신하는 단계와,
상기 로봇에 의한 상기 텔레프레전스 세션을 위해 타겟 인물에 대한 식별을 수신하는 단계와,
사람에 대한 현재 위치를 검색하는 단계와,
만약 사람이 발견되면 상기 사람이 상기 타겟 인물인지 여부를 판정하는 단계와,
만약 상기 발견된 사람이 상기 타겟 인물이 아니라면 상기 발견된 사람이 상기 타겟 인물에 대한 위치추적을 하도록 유도하는 단계와,
상기 유도에 응답하여 주어진 답변에서 제공된 위치로 이동하는 단계를 포함하는
방법.
- 제 5 항에 있어서,
이미지 내의 사람을 식별하도록 얼굴 인식 소프트웨어를 이용하는 단계를 포함하는
방법.
- 제 5 항에 있어서,
상기 위치로 이동하는 동안, 얼굴을 스캔하는 단계, 사운드를 듣는 단계, 또는 둘 모두를 포함하는
방법.
- 제 5 항에 있어서,
환경 내의 모션의 위치를 찾는 단계와,
상기 로봇이 상기 모션의 위치를 향해 이동하는 단계와,
상기 모션의 위치에서 얼굴을 스캔하는 단계를 포함하는
방법.
- 제 5 항에 있어서,
사운드의 위치를 찾는 단계와,
카메라가 상기 사운드를 향하게 하도록 소탑(turret)을 이동시키는 단계와,
상기 사운드의 위치에서 얼굴을 스캔하는 단계를 포함하는
방법.
- 하나 이상의 프로세싱 디바이스에 의해 실행되었을 때, 타겟 인물의 위치를 찾기 위한 시스템을 제공하는 컴퓨터 판독가능한 명령을 저장하는 하나 이상의 비휘발성 컴퓨터 판독가능한 저장 매체로서,
상기 컴퓨터 판독가능한 명령은,
음성 커맨드를 수신하도록 구성된 코드 -상기 음성 커맨드는 로봇에게 특정 위치에서 사람을 찾도록 명령함- 와,
상기 로봇을 상기 특정 위치로 이동시키도록 구성된 코드
를 포함하는
컴퓨터 판독가능한 저장 매체.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US13/195,871 | 2011-08-02 | ||
| US13/195,871 US8761933B2 (en) | 2011-08-02 | 2011-08-02 | Finding a called party |
| PCT/US2012/047089 WO2013019402A1 (en) | 2011-08-02 | 2012-07-17 | Finding a called party |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20140053149A true KR20140053149A (ko) | 2014-05-07 |
| KR102040340B1 KR102040340B1 (ko) | 2019-11-04 |
Family
ID=47627473
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020147002561A Expired - Fee Related KR102040340B1 (ko) | 2011-08-02 | 2012-07-17 | 피호출자 검색 기법 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US8761933B2 (ko) |
| EP (1) | EP2740013B1 (ko) |
| JP (1) | JP2014522053A (ko) |
| KR (1) | KR102040340B1 (ko) |
| CN (1) | CN103718125B (ko) |
| WO (1) | WO2013019402A1 (ko) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20190044683A (ko) * | 2016-09-15 | 2019-04-30 | 구글 엘엘씨 | 로봇 에이전트용 제어 정책 |
| US10477143B2 (en) | 2014-06-16 | 2019-11-12 | Sony Corporation | Information processing device, information processing method, and terminal device |
Families Citing this family (73)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9323250B2 (en) | 2011-01-28 | 2016-04-26 | Intouch Technologies, Inc. | Time-dependent navigation of telepresence robots |
| US9098611B2 (en) | 2012-11-26 | 2015-08-04 | Intouch Technologies, Inc. | Enhanced video interaction for a user interface of a telepresence network |
| CN103607968B (zh) * | 2011-05-31 | 2017-07-04 | 直观外科手术操作公司 | 机器人外科器械末端执行器的主动控制 |
| US9314307B2 (en) | 2011-10-21 | 2016-04-19 | Intuitive Surgical Operations, Inc. | Grip force control for robotic surgical instrument end effector |
| KR101970962B1 (ko) * | 2012-03-19 | 2019-04-22 | 삼성전자주식회사 | 아기 감시 방법 및 장치 |
| WO2013176758A1 (en) * | 2012-05-22 | 2013-11-28 | Intouch Technologies, Inc. | Clinical workflows utilizing autonomous and semi-autonomous telemedicine devices |
| US9361021B2 (en) | 2012-05-22 | 2016-06-07 | Irobot Corporation | Graphical user interfaces including touchpad driving interfaces for telemedicine devices |
| US20140094997A1 (en) * | 2012-09-28 | 2014-04-03 | Elwha Llc | Automated Systems, Devices, and Methods for Transporting and Supporting Patients Including Multi-Floor Operation |
| US9220651B2 (en) * | 2012-09-28 | 2015-12-29 | Elwha Llc | Automated systems, devices, and methods for transporting and supporting patients |
| AU2013204965B2 (en) * | 2012-11-12 | 2016-07-28 | C2 Systems Limited | A system, method, computer program and data signal for the registration, monitoring and control of machines and devices |
| KR101428877B1 (ko) * | 2012-12-05 | 2014-08-14 | 엘지전자 주식회사 | 로봇 청소기 |
| US9954909B2 (en) | 2013-08-27 | 2018-04-24 | Cisco Technology, Inc. | System and associated methodology for enhancing communication sessions between multiple users |
| EP3682725A1 (en) * | 2014-01-21 | 2020-07-22 | Positec Power Tools (Suzhou) Co., Ltd | Automatic lawnmower |
| JP6149230B2 (ja) * | 2014-03-28 | 2017-06-21 | 学校法人塚本学院 | 脳機能障害者生活支援装置 |
| EP2933069B1 (en) * | 2014-04-17 | 2019-07-03 | Softbank Robotics Europe | Omnidirectional wheeled humanoid robot based on a linear predictive position and velocity controller |
| CN105844202A (zh) * | 2015-01-12 | 2016-08-10 | 芋头科技(杭州)有限公司 | 一种影像识别系统及方法 |
| US9826082B2 (en) * | 2015-02-12 | 2017-11-21 | Motorola Mobility Llc | Adaptive filtering for presence detection |
| JP6455977B2 (ja) * | 2015-02-27 | 2019-01-23 | みこらった株式会社 | 飛行体 |
| DE102015109775B3 (de) | 2015-06-18 | 2016-09-22 | RobArt GmbH | Optischer Triangulationssensor zur Entfernungsmessung |
| CN105184214B (zh) * | 2015-07-20 | 2019-02-01 | 北京进化者机器人科技有限公司 | 一种基于声源定位和人脸检测的人体定位方法和系统 |
| CN105069437A (zh) * | 2015-08-14 | 2015-11-18 | 惠州Tcl移动通信有限公司 | 一种能够自动识别位置的智能系统及其实现方法 |
| US10580335B2 (en) * | 2015-08-18 | 2020-03-03 | Toyota Motor Engineering & Manufacturing North America, Inc. | Portable display apparatuses |
| DE102015114883A1 (de) | 2015-09-04 | 2017-03-09 | RobArt GmbH | Identifizierung und Lokalisierung einer Basisstation eines autonomen mobilen Roboters |
| KR102522714B1 (ko) | 2015-09-15 | 2023-04-14 | 스미토모 겐키 가부시키가이샤 | 쇼벨 |
| WO2017056632A1 (ja) | 2015-09-30 | 2017-04-06 | ソニー株式会社 | 情報処理装置及び情報処理方法 |
| DE112016004803T5 (de) | 2015-10-20 | 2018-06-28 | Sony Corporation | Informationsverarbeitungseinrichtung, steuerverfahren für informationsverarbeitungseinrichtung und computerprogramm |
| WO2017068926A1 (ja) * | 2015-10-21 | 2017-04-27 | ソニー株式会社 | 情報処理装置及びその制御方法、並びにコンピュータ・プログラム |
| DE102015119501A1 (de) | 2015-11-11 | 2017-05-11 | RobArt GmbH | Unterteilung von Karten für die Roboternavigation |
| DE102015119865B4 (de) | 2015-11-17 | 2023-12-21 | RobArt GmbH | Robotergestützte Bearbeitung einer Oberfläche mittels eines Roboters |
| DE102015121666B3 (de) | 2015-12-11 | 2017-05-24 | RobArt GmbH | Fernsteuerung eines mobilen, autonomen Roboters |
| CN114640827B (zh) | 2016-01-29 | 2025-07-18 | 住友建机株式会社 | 挖土机以及在挖土机的周围飞行的自主式飞行体 |
| DE102016102644A1 (de) | 2016-02-15 | 2017-08-17 | RobArt GmbH | Verfahren zur Steuerung eines autonomen mobilen Roboters |
| JP6726388B2 (ja) * | 2016-03-16 | 2020-07-22 | 富士ゼロックス株式会社 | ロボット制御システム |
| CN109153127B (zh) | 2016-03-28 | 2022-05-31 | Groove X 株式会社 | 执行迎接行为的行为自主型机器人 |
| JP6475191B2 (ja) * | 2016-05-26 | 2019-02-27 | ベステラ株式会社 | パトロール作業用ロボット及びパトロール作業用ロボットを用いた警報システム |
| KR101777392B1 (ko) | 2016-07-04 | 2017-09-11 | 주식회사 케이티 | 중앙 서버 및 이에 의한 사용자 음성 처리 방법 |
| JP6786912B2 (ja) * | 2016-07-05 | 2020-11-18 | 富士ゼロックス株式会社 | 移動ロボットおよび移動制御システム |
| WO2018024897A1 (de) | 2016-08-05 | 2018-02-08 | RobArt GmbH | Verfahren zur steuerung eines autonomen mobilen roboters |
| US10726836B2 (en) * | 2016-08-12 | 2020-07-28 | Kt Corporation | Providing audio and video feedback with character based on voice command |
| US10607070B2 (en) | 2016-09-30 | 2020-03-31 | Intel Corporation | Human search and identification in complex scenarios |
| JP2018077599A (ja) * | 2016-11-08 | 2018-05-17 | 富士ゼロックス株式会社 | 情報処理装置 |
| JP6670224B2 (ja) * | 2016-11-14 | 2020-03-18 | 株式会社日立製作所 | 音声信号処理システム |
| CN106791565A (zh) * | 2016-12-15 | 2017-05-31 | 北京奇虎科技有限公司 | 机器人视频通话控制方法、装置及终端 |
| US9854206B1 (en) * | 2016-12-22 | 2017-12-26 | TCL Research America Inc. | Privacy-aware indoor drone exploration and communication framework |
| JP2018112775A (ja) * | 2017-01-06 | 2018-07-19 | 富士ゼロックス株式会社 | 自律移動ロボット |
| KR101889279B1 (ko) | 2017-01-16 | 2018-08-21 | 주식회사 케이티 | 음성 명령에 기반하여 서비스를 제공하는 시스템 및 방법 |
| JP2020509500A (ja) | 2017-03-02 | 2020-03-26 | ロブアート ゲーエムベーハーROBART GmbH | 自律移動ロボットの制御方法 |
| DE102017109219A1 (de) | 2017-04-28 | 2018-10-31 | RobArt GmbH | Verfahren für die Roboternavigation |
| JP7000704B2 (ja) * | 2017-05-16 | 2022-01-19 | 富士フイルムビジネスイノベーション株式会社 | 移動式サービス提供装置及びプログラム |
| GB2565315B (en) * | 2017-08-09 | 2022-05-04 | Emotech Ltd | Robots, methods, computer programs, computer-readable media, arrays of microphones and controllers |
| US11214437B1 (en) | 2017-09-13 | 2022-01-04 | AI Incorporated | Autonomous mobile robotic device for the transportation of items |
| JP6814118B2 (ja) * | 2017-09-15 | 2021-01-13 | 株式会社日立製作所 | ロボット制御装置、システム、及び方法 |
| US10511943B2 (en) * | 2017-11-29 | 2019-12-17 | Qualcomm Incorporated | Method and apparatus for requesting a transport vehicle from a mobile device |
| US10901430B2 (en) * | 2017-11-30 | 2021-01-26 | International Business Machines Corporation | Autonomous robotic avatars |
| US10612934B2 (en) * | 2018-01-12 | 2020-04-07 | General Electric Company | System and methods for robotic autonomous motion planning and navigation |
| CN108415276A (zh) * | 2018-02-02 | 2018-08-17 | 王振海 | 一种基于语言交互的计算、判断和控制系统 |
| JP6570002B1 (ja) * | 2018-04-24 | 2019-09-04 | 鎌倉インベストメント株式会社 | 通話システム |
| US10675760B2 (en) * | 2018-06-14 | 2020-06-09 | International Business Machines Corporation | Robot identification manager |
| US11368497B1 (en) * | 2018-09-18 | 2022-06-21 | Amazon Technolgies, Inc. | System for autonomous mobile device assisted communication |
| KR102228866B1 (ko) * | 2018-10-18 | 2021-03-17 | 엘지전자 주식회사 | 로봇 및 그의 제어 방법 |
| CN109309813A (zh) * | 2018-10-22 | 2019-02-05 | 北方工业大学 | 适应室内的智能跟随方法及智能跟随机器人 |
| CN109658570A (zh) * | 2018-12-19 | 2019-04-19 | 中新智擎科技有限公司 | 一种服务器、客户端、移动机器人、门禁控制系统及方法 |
| KR102668070B1 (ko) * | 2019-03-15 | 2024-05-29 | 삼성전자주식회사 | 로봇 청소기 및 이의 제어 방법 |
| USD968508S1 (en) | 2019-06-06 | 2022-11-01 | Xerox Corporation | Mobile printer and storage compartment unit assembly |
| US10754600B1 (en) | 2019-06-06 | 2020-08-25 | Xerox Corporation | Self-navigating mobile printers making autonomous printing decisions |
| JP7532941B2 (ja) * | 2019-07-03 | 2024-08-14 | 株式会社リコー | 情報処理装置、テレプレゼンスロボット、拠点制御システム、遠隔制御システム、情報処理方法およびプログラム |
| CN112643650A (zh) * | 2020-12-10 | 2021-04-13 | 深圳优地科技有限公司 | 基于机器人的儿童任务托管方法、装置、设备及存储介质 |
| CN112508657B (zh) * | 2021-02-02 | 2021-05-25 | 红石阳光(北京)科技股份有限公司 | 基于智慧大脑控制迎宾机器人的方法及系统 |
| US12047833B2 (en) * | 2022-02-25 | 2024-07-23 | Toyota Motor Engineering & Manufacturing North America, Inc. | Method and system for connection handover from telepresence robot to mobile office |
| KR20240062705A (ko) | 2022-11-02 | 2024-05-09 | 엘지전자 주식회사 | 로봇 |
| CN116038724B (zh) * | 2022-12-23 | 2026-02-06 | 美的集团(上海)有限公司 | 交互方法及装置、机器人、存储介质和计算机程序产品 |
| CN115909463A (zh) * | 2022-12-23 | 2023-04-04 | 美的集团(上海)有限公司 | 对象识别方法及装置、机器人和可读存储介质 |
| CN115963825B (zh) * | 2022-12-23 | 2024-03-26 | 美的集团(上海)有限公司 | 智能设备及其控制方法和装置、计算机程序产品 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20040008791A (ko) * | 2002-07-19 | 2004-01-31 | 삼성전자주식회사 | 영상시각 정보를 결합하여 실시간으로 복수의 얼굴을검출하고 추적하는 얼굴 검출 및 추적 시스템 및 방법 |
| JP2005010244A (ja) * | 2003-06-17 | 2005-01-13 | Nikon Corp | 撮影装置 |
| KR20060018061A (ko) * | 2004-08-23 | 2006-02-28 | 삼성전자주식회사 | 로봇을 이용하여 사람을 추적하는 방법 및 장치 |
| JP2006192563A (ja) * | 2004-12-14 | 2006-07-27 | Honda Motor Co Ltd | 識別対象識別装置およびそれを備えたロボット |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6804396B2 (en) * | 2001-03-28 | 2004-10-12 | Honda Giken Kogyo Kabushiki Kaisha | Gesture recognition system |
| US20090030552A1 (en) * | 2002-12-17 | 2009-01-29 | Japan Science And Technology Agency | Robotics visual and auditory system |
| JP3879848B2 (ja) * | 2003-03-14 | 2007-02-14 | 松下電工株式会社 | 自律移動装置 |
| JP4247041B2 (ja) * | 2003-04-01 | 2009-04-02 | 本田技研工業株式会社 | 顔識別システム |
| US20070061041A1 (en) * | 2003-09-02 | 2007-03-15 | Zweig Stephen E | Mobile robot with wireless location sensing apparatus |
| JP2005103703A (ja) * | 2003-09-30 | 2005-04-21 | Toshiba Corp | ロボット |
| US7756614B2 (en) * | 2004-02-27 | 2010-07-13 | Hewlett-Packard Development Company, L.P. | Mobile device control system |
| WO2005098729A2 (en) | 2004-03-27 | 2005-10-20 | Harvey Koselka | Autonomous personal service robot |
| US7317388B2 (en) * | 2004-03-31 | 2008-01-08 | Honda Motor Co., Ltd. | Position detection system for mobile object |
| KR20060108848A (ko) * | 2005-04-14 | 2006-10-18 | 엘지전자 주식회사 | 무선 제어가 가능한 청소로봇과 그를 이용한 원격 제어시스템 |
| ATE522330T1 (de) * | 2005-09-30 | 2011-09-15 | Irobot Corp | Robotersystem mit kabelloser kommunikation mittels tcp/ip übertragung |
| JP2008084135A (ja) | 2006-09-28 | 2008-04-10 | Toshiba Corp | 移動制御方法、移動ロボットおよび移動制御プログラム |
| NL2000632C2 (nl) * | 2007-05-07 | 2008-11-10 | Spectator Intellectual Propert | Systeem en werkwijze voor het via, een ten minste gedeeltelijk publiek communicatienetwerk, uitwisselen van data tussen een eerste dataverwerkingssysteem en een tweede dataverwerkingssysteem. |
| US10875182B2 (en) * | 2008-03-20 | 2020-12-29 | Teladoc Health, Inc. | Remote presence system mounted to operating room hardware |
| US9014848B2 (en) * | 2010-05-20 | 2015-04-21 | Irobot Corporation | Mobile robot system |
| US10808882B2 (en) * | 2010-05-26 | 2020-10-20 | Intouch Technologies, Inc. | Tele-robotic system with a robot face placed on a chair |
-
2011
- 2011-08-02 US US13/195,871 patent/US8761933B2/en not_active Expired - Fee Related
-
2012
- 2012-07-17 KR KR1020147002561A patent/KR102040340B1/ko not_active Expired - Fee Related
- 2012-07-17 JP JP2014523950A patent/JP2014522053A/ja active Pending
- 2012-07-17 EP EP12820660.4A patent/EP2740013B1/en not_active Not-in-force
- 2012-07-17 WO PCT/US2012/047089 patent/WO2013019402A1/en not_active Ceased
- 2012-07-17 CN CN201280038238.2A patent/CN103718125B/zh not_active Expired - Fee Related
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20040008791A (ko) * | 2002-07-19 | 2004-01-31 | 삼성전자주식회사 | 영상시각 정보를 결합하여 실시간으로 복수의 얼굴을검출하고 추적하는 얼굴 검출 및 추적 시스템 및 방법 |
| JP2005010244A (ja) * | 2003-06-17 | 2005-01-13 | Nikon Corp | 撮影装置 |
| KR20060018061A (ko) * | 2004-08-23 | 2006-02-28 | 삼성전자주식회사 | 로봇을 이용하여 사람을 추적하는 방법 및 장치 |
| JP2006192563A (ja) * | 2004-12-14 | 2006-07-27 | Honda Motor Co Ltd | 識別対象識別装置およびそれを備えたロボット |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10477143B2 (en) | 2014-06-16 | 2019-11-12 | Sony Corporation | Information processing device, information processing method, and terminal device |
| KR20190044683A (ko) * | 2016-09-15 | 2019-04-30 | 구글 엘엘씨 | 로봇 에이전트용 제어 정책 |
| US11853876B2 (en) | 2016-09-15 | 2023-12-26 | Google Llc | Control policies for robotic agents |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2014522053A (ja) | 2014-08-28 |
| CN103718125A (zh) | 2014-04-09 |
| US8761933B2 (en) | 2014-06-24 |
| KR102040340B1 (ko) | 2019-11-04 |
| EP2740013A1 (en) | 2014-06-11 |
| CN103718125B (zh) | 2017-01-18 |
| EP2740013B1 (en) | 2018-08-22 |
| WO2013019402A1 (en) | 2013-02-07 |
| EP2740013A4 (en) | 2015-12-30 |
| US20130035790A1 (en) | 2013-02-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102040340B1 (ko) | 피호출자 검색 기법 | |
| US12328563B2 (en) | Wearable electronic device (WED) plays sound processed with a room impulse response (RIR) | |
| US20240171930A1 (en) | User Experience Localizing Binaural Sound During a Telephone Call | |
| US9950431B2 (en) | Interactive robot initialization | |
| US8736228B1 (en) | Charging an electronic device including traversing at least a portion of a path with an apparatus | |
| KR102463806B1 (ko) | 이동이 가능한 전자 장치 및 그 동작 방법 | |
| US20160025499A1 (en) | Intelligent mobility aid device and method of navigating and providing assistance to a user thereof | |
| EP4113452A1 (en) | Data sharing method and device | |
| JP7400882B2 (ja) | 情報処理装置、移動体、遠隔制御システム、情報処理方法およびプログラム | |
| US11426879B2 (en) | Device, method, and program | |
| CN108326875B (zh) | 通信控制方法与装置、远程呈现机器人以及存储介质 | |
| JP6934623B2 (ja) | 通信制御方法、テレプレゼンスロボット、及び通信制御プログラム | |
| US20240281203A1 (en) | Information processing device, information processing method, and storage medium |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0105 | International application |
St.27 status event code: A-0-1-A10-A15-nap-PA0105 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-3-3-R10-R13-asn-PN2301 St.27 status event code: A-3-3-R10-R11-asn-PN2301 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| N231 | Notification of change of applicant | ||
| PN2301 | Change of applicant |
St.27 status event code: A-3-3-R10-R13-asn-PN2301 St.27 status event code: A-3-3-R10-R11-asn-PN2301 |
|
| A201 | Request for examination | ||
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U12-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| PC1903 | Unpaid annual fee |
St.27 status event code: A-4-4-U10-U13-oth-PC1903 Not in force date: 20221030 Payment event data comment text: Termination Category : DEFAULT_OF_REGISTRATION_FEE |
|
| PC1903 | Unpaid annual fee |
St.27 status event code: N-4-6-H10-H13-oth-PC1903 Ip right cessation event data comment text: Termination Category : DEFAULT_OF_REGISTRATION_FEE Not in force date: 20221030 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |