KR20140086579A - 클럭 신호의 주파수 변화 제어 회로 - Google Patents
클럭 신호의 주파수 변화 제어 회로 Download PDFInfo
- Publication number
- KR20140086579A KR20140086579A KR1020120157255A KR20120157255A KR20140086579A KR 20140086579 A KR20140086579 A KR 20140086579A KR 1020120157255 A KR1020120157255 A KR 1020120157255A KR 20120157255 A KR20120157255 A KR 20120157255A KR 20140086579 A KR20140086579 A KR 20140086579A
- Authority
- KR
- South Korea
- Prior art keywords
- signal
- frequency
- clock
- reference clock
- phase
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images














Classifications
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03K—PULSE TECHNIQUE
- H03K5/00—Manipulating of pulses not covered by one of the other main groups of this subclass
- H03K5/125—Discriminating pulses
- H03K5/1252—Suppression or limitation of noise or interference
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03L—AUTOMATIC CONTROL, STARTING, SYNCHRONISATION OR STABILISATION OF GENERATORS OF ELECTRONIC OSCILLATIONS OR PULSES
- H03L7/00—Automatic control of frequency or phase; Synchronisation
- H03L7/06—Automatic control of frequency or phase; Synchronisation using a reference signal applied to a frequency- or phase-locked loop
- H03L7/08—Details of the phase-locked loop
- H03L7/085—Details of the phase-locked loop concerning mainly the frequency- or phase-detection arrangement including the filtering or amplification of its output signal
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03L—AUTOMATIC CONTROL, STARTING, SYNCHRONISATION OR STABILISATION OF GENERATORS OF ELECTRONIC OSCILLATIONS OR PULSES
- H03L7/00—Automatic control of frequency or phase; Synchronisation
- H03L7/06—Automatic control of frequency or phase; Synchronisation using a reference signal applied to a frequency- or phase-locked loop
- H03L7/08—Details of the phase-locked loop
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03L—AUTOMATIC CONTROL, STARTING, SYNCHRONISATION OR STABILISATION OF GENERATORS OF ELECTRONIC OSCILLATIONS OR PULSES
- H03L7/00—Automatic control of frequency or phase; Synchronisation
- H03L7/06—Automatic control of frequency or phase; Synchronisation using a reference signal applied to a frequency- or phase-locked loop
- H03L7/08—Details of the phase-locked loop
- H03L7/085—Details of the phase-locked loop concerning mainly the frequency- or phase-detection arrangement including the filtering or amplification of its output signal
- H03L7/095—Details of the phase-locked loop concerning mainly the frequency- or phase-detection arrangement including the filtering or amplification of its output signal using a lock detector
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03L—AUTOMATIC CONTROL, STARTING, SYNCHRONISATION OR STABILISATION OF GENERATORS OF ELECTRONIC OSCILLATIONS OR PULSES
- H03L7/00—Automatic control of frequency or phase; Synchronisation
- H03L7/06—Automatic control of frequency or phase; Synchronisation using a reference signal applied to a frequency- or phase-locked loop
- H03L7/08—Details of the phase-locked loop
- H03L7/10—Details of the phase-locked loop for assuring initial synchronisation or for broadening the capture range
- H03L7/107—Details of the phase-locked loop for assuring initial synchronisation or for broadening the capture range using a variable transfer function for the loop, e.g. low pass filter having a variable bandwidth
- H03L7/1077—Details of the phase-locked loop for assuring initial synchronisation or for broadening the capture range using a variable transfer function for the loop, e.g. low pass filter having a variable bandwidth by changing characteristics of the phase or frequency detection means
Landscapes
- Physics & Mathematics (AREA)
- Nonlinear Science (AREA)
- Stabilization Of Oscillater, Synchronisation, Frequency Synthesizers (AREA)
Abstract
Description
도 1의 (b)는 SSC의 급격한 주파수 변동을 예시한 파형도.
도 2는 본 발명에 따른 클럭 신호의 주파수 변동 차단 제어 회로의 바람직한 실시예를 나타내는 블록 다이어그램.
도 3의 (a)는 클린 클럭의 급격한 주파수 변동을 차단한 상태를 예시한 파형도.
도 3의 (b)는 SSC의 급격한 주파수 변동을 차단한 상태를 예시한 파형도.
도 4는 본 발명에 따른 실시예에 의하여 피드백 펄스가 제어되는 상태를 예시한 파형도.
도 5는 도 2의 발진 제어부의 상세 블록 다이어그램.
도 6은 제어 전압에 따른 발진 신호의 주파수 변화를 나타내는 그래프.
도 7은 도 2의 클럭 출력 회로의 상세 블록 다이어그램.
도 8은 도 7의 클럭 출력 회로의 타이밍 다이어그램.
도 9는 도 2의 주파수 제어기의 상세 블록 다이어 그램.
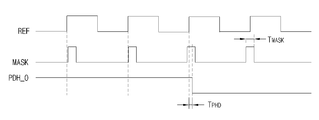
도 10은 락 디텍터의 타이밍 다이어그램.
도 11은 락 상태가 아닌 경우 급격한 주파수 변동 검출기의 타이밍 다이어 그램.
도 12 및 도 13은 락 상태의 급격한 주파수 변동 검출기의 타이밍 다이어그램.
도 14는 제어 신호 생성부의 타이밍 다이어그램.
도 15는 제어 신호 생성부가 주파수 제어 신호를 논리 레벨 로우로 생성하는 것을 설명하는 타이밍 다이어그램.
도 16은 위상 검출기의 블록 다이어그램.
도 17은 도 16의 위상 검출기의 타이밍 다이어그램.
도 18의 (a) 및 (b)는 지연시간 TPHD 의 적용 여부에 따른 정상 상태와 비정상 상태의 업 신호 AB_UP와 다운 신호 AB_DN를 예시한 타이밍 다이어그램.
도 19는 도 2의 실시예의 타이밍 다이어그램.
14 : 발진 제어부 16 : 전압 제어기
18 : 클럭 출력 회로 20 : 차지 펌프
22 : LPF 30 : 마스크 신호 생성부
32 : 분주 회로 40 : 락 디텍터
42 : 급격한 주파수 변동 검출기
44 : 제어 신호 생성부 50 : 위상 주파수 검출부
52, 54 : 멀티플렉서
Claims (13)
- 주파수 제어 신호에 응답하여 기준 클럭과 피드백 클럭의 위상차 신호를 출력하는 위상 검출기;
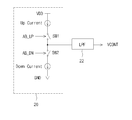
상기 위상차 신호에 대응한 제어 전압을 출력하는 발진 제어부;
상기 제어 전압에 대응하는 주파수의 발진 신호를 출력하는 전압 제어 발진기;
상기 발진 신호를 분주하여 상기 피드백 클럭으로 출력하는 클럭 출력 회로; 및
상기 기준 클럭과 상기 피드백 클럭의 위상이 락된 상태에서, 상기 기준 클럭에서 설정된 범위를 벗어난 주파수 변동이 발생하면 상기 주파수 제어 신호를 상기 위상 검출기로 제공하는 주파수 제어기;를 포함하며,
상기 제어 전압의 레벨은 상기 위상차 신호에 따라 일정하게 유지되고,
상기 피드백 클럭의 주파수는 일정하게 유지되는 상기 제어 전압의 레벨에 따라 일정하게 유지됨을 특징으로 하는 클럭 신호의 주파수 변동 제어 회로,
- 제1 항에 있어서,
상기 위상차 신호는 기준 클럭과 피드백 클럭의 위상차에 대응한 업 신호와 다운 신호를 포함하는 클럭 신호의 주파수 변동 제어 회로.
- 제1 항에 있어서,
상기 클럭 출력 회로는 상기 피드백 클럭의 천이 시점을 기준으로 일정한 위상 차에 해당하는 폭을 갖는 마스크 신호를 출력하는 클럭 신호의 주파수 변동 제어 회로.
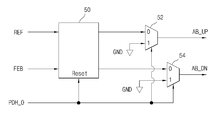
- 제1 항에 있어서, 상기 위상 검출기는,
상기 기준 클럭과 상기 피드백 클럭의 위상을 비교하여 위상 차에 대응한 위상차 신호로 업 신호와 다운 신호를 출력하며 상기 주파수 제어 신호에 의하여 리셋되는 위상 주파수 검출부;
상기 주파수 제어 신호에 의하여 상기 업 신호와 논리 레벨 로우 중 어느 하나를 선택하여 출력하는 제1 멀티플렉서; 및
상기 주파수 제어 신호에 의하여 상기 다운 신호와 논리 레벨 로우 중 어느 하나를 선택하여 출력하는 제2 멀티플렉서;를 포함하며,
상기 주파수 제어 신호에 의하여 상기 위상 주파수 검출부의 리셋과 상기 제1 및 제2 멀티플렉서의 논리 레벨 로우의 출력이 동시에 진행되는 클럭 신호의 주파수 변동 제어 회로.
- 제1 항에 있어서, 상기 클럭 출력 회로는,
상기 발진 신호를 분주하여 상기 피드백 클럭으로 출력하는 분주 회로; 및
상기 피드백 클럭의 상승 에지를 기준으로 일정한 위상 차에 해당하는 폭을 갖는 마스크 신호를 생성하여 출력하는 마스크 신호 생성부;를 포함하는 클럭 신호의 주파수 변동 제어 회로.
- 제5 항에 있어서,
상기 마스크 신호 생성부는 상기 발진 신호로써 상기 마스크 신호 생성을 위한 상기 위상 차를 결정하는 클럭 신호의 주파수 변동 제어 회로.
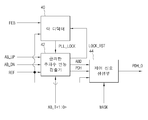
- 제1 항에 있어서, 상기 주파수 제어기는,
상기 기준 클럭과 상기 피드백 클럭의 위상이 락된 상태에 대응하여 락 검출 신호를 제공하며 락 리셋신호에 의하여 상기 락 검출 신호를 리셋하는 락 디텍터;
상기 기준 클럭에서 미리 설정된 범위를 벗어난 급격한 주파수 변동의 발생은 상기 기준 클럭의 하강 에지가 상기 업 신호와 상기 다운 신호 중 어느 하나의 펄스 폭에 위치하는 경우로 판단하여 급격한 주파수 변동 검출 신호 및 홀딩 신호를 출력하며, 상기 급격한 주파수 변동 검출 신호의 종료 시점에 상기 락 리셋 신호를 출력하는 급격한 주파수 변동 검출기; 및
상기 급격한 주파수 변동 검출 신호와 상기 홀딩 신호가 입력되는 시점 이후 상기 주파수 제어 신호를 출력하고, 상기 홀딩 신호가 유지되는 시간과 그 후 상기 기준 클럭의 상승 에지가 상기 마스크 신호의 펄스 폭에 위치할 때까지 유지되는 비교 시간 동안 상기 주파수 제어 신호의 출력을 유지하는 제어 신호 생성부;를 포함하는 클럭 신호의 주파수 변동 제어 회로.
- 제7 항에 있어서,
상기 제어 신호 생성부는 상기 주파수 제어 신호의 출력을 상기 기준 클럭의 상승 에지가 상기 마스크 신호의 펄스 폭에 위치한 시점으로부터 적어도 '마스크 신호의 펄스 폭/2' 미만이 되는 시점까지 유지하는 클럭 신호의 주파수 변동 제어 회로.
- 기준 클럭과 피드백 클럭의 위상을 비교하여 위상 차에 대응한 업 신호와 다운 신호를 출력하면서 상기 기준 클럭과 상기 피드백 클럭의 주기와 위상에 대한 락을 수행하고, 상기 업 신호와 상기 다운 신호에 대응한 상기 피드백 클럭을 생성하여 출력하는 PLL 회로;
상기 피드백 클럭의 상승 에지를 기준으로 일정한 위상 차에 해당하는 폭을 갖는 마스크 신호를 생성하여 출력하는 마스크 신호 생성부; 및
상기 기준 클럭과 상기 피드백 클럭의 위상이 락된 상태에서, 상기 기준 클럭에서 미리 설정된 범위를 벗어난 급격한 주파수 변동이 발생하면 주파수 제어 신호를 상기 PLL 회로로 제공하여 상기 업 신호와 상기 다운 신호의 출력을 제어하여 상기 피드백 클럭의 주파수를 일정하게 유지시키는 주파수 제어기;를 포함함을 특징으로 하는 클럭 신호의 주파수 변동 제어 회로,
- 제9 항에 있어서,
상기 마스크 신호 생성부는 ±(상기 피드백 클럭의 주기/16)의 위상 차에 대응하는 폭으로 상기 마스크 신호를 생성하는 클럭 신호의 주파수 변동 제어 회로.
- 제9 항에 있어서, 상기 주파수 제어기는,
상기 기준 클럭과 상기 피드백 클럭의 위상이 락된 상태에 대응하여 락 검출 신호를 제공하며 락 리셋신호에 의하여 상기 락 검출 신호를 리셋하는 락 디텍터;
상기 기준 클럭에서 미리 설정된 범위를 벗어난 급격한 주파수 변동이 발생한 것으로 판단하면 급격한 주파수 변동 검출 신호 및 홀딩 신호를 출력하며, 상기 급격한 주파수 변동 검출 신호의 종료 시점에 상기 락 리셋 신호를 출력하는 급격한 주파수 변동 검출기; 및
상기 급격한 주파수 변동 검출 신호와 상기 홀딩 신호가 입력되는 시점 이후 상기 주파수 제어 신호를 출력하고, 상기 홀딩 신호가 유지되는 시간과 그 후 상기 기준 클럭의 상승 에지가 상기 마스크 신호의 펄스 폭에 위치할 때까지 유지되는 비교 시간 동안 상기 주파수 제어 신호의 출력을 유지하는 제어 신호 생성부;를 포함하는 클럭 신호의 주파수 변동 제어 회로.
- 제11 항에 있어서,
상기 급격한 주파수 변동 검출기는 상기 급격한 주파수 변동을 상기 기준 클럭의 하강 에지가 상기 업 신호와 상기 다운 신호 중 어느 하나의 펄스 폭에 위치하는 것으로 판단하는 클럭 신호의 주파수 변동 제어 회로.
- 제9 항에 있어서,
상기 제어 신호 생성부는 상기 주파수 제어 신호의 출력을 상기 기준 클럭의 상승 에지가 상기 마스크 신호의 펄스 폭에 위치한 시점으로부터 적어도 '마스크 신호의 펄스 폭/2' 미만이 되는 시점까지 유지하는 클럭 신호의 주파수 변동 제어 회로.
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020120157255A KR102029688B1 (ko) | 2012-12-28 | 2012-12-28 | 클럭 신호의 주파수 변화 제어 회로 |
| CN201310745734.8A CN103916121B (zh) | 2012-12-28 | 2013-12-30 | 用于控制时钟信号的频率变化的电路 |
| US14/143,401 US9035683B2 (en) | 2012-12-28 | 2013-12-30 | Circuit for controlling variation in frequency of clock signal |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020120157255A KR102029688B1 (ko) | 2012-12-28 | 2012-12-28 | 클럭 신호의 주파수 변화 제어 회로 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20140086579A true KR20140086579A (ko) | 2014-07-08 |
| KR102029688B1 KR102029688B1 (ko) | 2019-10-08 |
Family
ID=51016500
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020120157255A Active KR102029688B1 (ko) | 2012-12-28 | 2012-12-28 | 클럭 신호의 주파수 변화 제어 회로 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US9035683B2 (ko) |
| KR (1) | KR102029688B1 (ko) |
| CN (1) | CN103916121B (ko) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2024128479A1 (ko) * | 2022-12-12 | 2024-06-20 | 주식회사 퀄리타스반도체 | 클럭 듀티 캘리브레이션 장치 및 방법 |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6007676B2 (ja) * | 2012-08-29 | 2016-10-12 | 富士通株式会社 | 判定支援装置、判定装置、メモリコントローラ、システム、および判定方法 |
| KR102211727B1 (ko) * | 2014-01-20 | 2021-02-03 | 삼성전자주식회사 | 디지털 위상 고정 루프, 디지털 위상 고정 루프를 제어하는 방법 및 디지털 위상 고정 루프를 이용한 초저전력 송수신기 |
| US10048357B2 (en) * | 2015-06-15 | 2018-08-14 | Microsoft Technology Licensing, Llc | Time-of-flight (TOF) system calibration |
| CN106708166B (zh) | 2017-01-09 | 2020-03-10 | 京东方科技集团股份有限公司 | 信号生成器和信号生成方法 |
| KR20220091880A (ko) | 2020-12-24 | 2022-07-01 | 삼성전자주식회사 | 위상 보간 기반의 클럭 데이터 복원 회로 및 이를 포함하는 통신 장치 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20070188251A1 (en) * | 2006-01-12 | 2007-08-16 | Kabushiki Kaisha Toshiba | Semiconductor device |
| US20100197349A1 (en) * | 2009-01-30 | 2010-08-05 | Renesas Technology Corp. | Semiconductor device, portable communication terminal, ic card, and microcomputer |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002261602A (ja) * | 2001-03-05 | 2002-09-13 | Asahi Kasei Microsystems Kk | Pll回路 |
| US6990165B2 (en) * | 2002-07-25 | 2006-01-24 | International Business Machines Corporation | Phase and frequency lock detector |
| KR100549868B1 (ko) * | 2003-10-07 | 2006-02-06 | 삼성전자주식회사 | 락 검출기능을 구비한 위상동기루프 회로 및 위상동기루프회로의 락 검출방법 |
| DE102007001934B3 (de) * | 2007-01-12 | 2008-07-31 | Texas Instruments Deutschland Gmbh | Phasenregelkreis |
| US7728631B2 (en) * | 2008-05-15 | 2010-06-01 | Atheros Communications, Inc. | Phase frequency detector with pulse width control circuitry |
| US8164369B2 (en) * | 2008-11-12 | 2012-04-24 | Qualcomm Incorporated | Techniques for minimizing control voltage noise due to charge pump leakage in phase locked loop circuits |
| JP2011040967A (ja) * | 2009-08-10 | 2011-02-24 | Nippon Dempa Kogyo Co Ltd | Pll回路 |
| JP2011188077A (ja) * | 2010-03-05 | 2011-09-22 | Renesas Electronics Corp | 位相同期回路及びその制御方法 |
-
2012
- 2012-12-28 KR KR1020120157255A patent/KR102029688B1/ko active Active
-
2013
- 2013-12-30 CN CN201310745734.8A patent/CN103916121B/zh active Active
- 2013-12-30 US US14/143,401 patent/US9035683B2/en active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20070188251A1 (en) * | 2006-01-12 | 2007-08-16 | Kabushiki Kaisha Toshiba | Semiconductor device |
| US20100197349A1 (en) * | 2009-01-30 | 2010-08-05 | Renesas Technology Corp. | Semiconductor device, portable communication terminal, ic card, and microcomputer |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2024128479A1 (ko) * | 2022-12-12 | 2024-06-20 | 주식회사 퀄리타스반도체 | 클럭 듀티 캘리브레이션 장치 및 방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN103916121A (zh) | 2014-07-09 |
| US9035683B2 (en) | 2015-05-19 |
| KR102029688B1 (ko) | 2019-10-08 |
| CN103916121B (zh) | 2018-12-28 |
| US20140184291A1 (en) | 2014-07-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9191187B2 (en) | Reception circuit and semiconductor integrated circuit | |
| JP5147539B2 (ja) | 周波数シンセサイザおよびその制御方法 | |
| KR20140086579A (ko) | 클럭 신호의 주파수 변화 제어 회로 | |
| US6150889A (en) | Circuit and method for minimizing recovery time | |
| KR20180062335A (ko) | 하이브리드 위상 고정 루프 | |
| JP2010509817A (ja) | 装置、位相ロック・ループ・システム及び位相ロック・ループを動作させるための方法 | |
| US7663417B2 (en) | Phase-locked loop circuit | |
| US8537947B2 (en) | Oversampling circuit, serial communication apparatus and oversampling method | |
| US20170310328A1 (en) | Signal generation circuit and signal generation method | |
| US7696831B2 (en) | Phase locked loop and method for controlling the same | |
| US10778234B2 (en) | Clock generation circuit and clock signal generation method | |
| US6434206B1 (en) | Phase locked loop circuit for reducing lock-in time | |
| US6965660B2 (en) | Digital phase-locked loop | |
| KR100706575B1 (ko) | 고속 락 기능을 갖는 주파수 합성기 | |
| KR101697309B1 (ko) | 광대역 하모닉 락 발생을 방지하는 지연 고정 루프 회로 그 지연 고정 방법 | |
| KR20160076644A (ko) | 서브 샘플링 위상 고정 루프를 기반으로 한 확산 스펙트럼 클럭 발생기 및 그의 자동 캘리브레이션 방법 | |
| KR102059595B1 (ko) | 위상 고정 루프 회로 | |
| KR100522204B1 (ko) | 위상동기루프회로에서 락업 타임을 단축시키는 장치 | |
| KR101327100B1 (ko) | 주파수 분주기, 이를 포함하는 위상 동기 루프 회로 및 그 제어 방법 | |
| KR20060090909A (ko) | 듀얼 루프를 가지는 위상동조기 및 그의 제어방법 | |
| KR100920828B1 (ko) | 동기 회로 | |
| US20120154030A1 (en) | Filter circuit, integrated circuit including the same, and signal filtering method | |
| KR20230009168A (ko) | 내부 클럭 생성 회로, 내부 클럭 생성 회로의 동작 방법, 및 이를 포함하는 집적 회로 | |
| KR100987072B1 (ko) | 위상 고정 루프의 위상 잡음 개선 장치 및 방법 | |
| TWI652905B (zh) | 本地振盪器的裝置與方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
St.27 status event code: A-0-1-A10-A12-nap-PA0109 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| PE0801 | Dismissal of amendment |
St.27 status event code: A-2-2-P10-P12-nap-PE0801 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-3-3-R10-R13-asn-PN2301 St.27 status event code: A-3-3-R10-R11-asn-PN2301 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| A201 | Request for examination | ||
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-3-3-R10-R13-asn-PN2301 St.27 status event code: A-3-3-R10-R11-asn-PN2301 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U11-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-5-5-R10-R18-oth-X000 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-5-5-R10-R13-asn-PN2301 St.27 status event code: A-5-5-R10-R11-asn-PN2301 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-5-5-R10-R13-asn-PN2301 St.27 status event code: A-5-5-R10-R11-asn-PN2301 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 4 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 5 |
|
| R17-X000 | Change to representative recorded |
St.27 status event code: A-5-5-R10-R17-oth-X000 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 6 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 7 |
|
| U11 | Full renewal or maintenance fee paid |
Free format text: ST27 STATUS EVENT CODE: A-4-4-U10-U11-OTH-PR1001 (AS PROVIDED BY THE NATIONAL OFFICE) Year of fee payment: 7 |