KR20140110620A - 수술 로봇 시스템 및 그 작동 방법 - Google Patents
수술 로봇 시스템 및 그 작동 방법 Download PDFInfo
- Publication number
- KR20140110620A KR20140110620A KR1020130025254A KR20130025254A KR20140110620A KR 20140110620 A KR20140110620 A KR 20140110620A KR 1020130025254 A KR1020130025254 A KR 1020130025254A KR 20130025254 A KR20130025254 A KR 20130025254A KR 20140110620 A KR20140110620 A KR 20140110620A
- Authority
- KR
- South Korea
- Prior art keywords
- arm
- instrument
- robot arm
- robot
- articulated
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
- UAEPNZWRGJTJPN-UHFFFAOYSA-N CC1CCCCC1 Chemical compound CC1CCCCC1 UAEPNZWRGJTJPN-UHFFFAOYSA-N 0.000 description 2
Images









Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B34/37—Leader-follower robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/361—Image-producing devices, e.g. surgical cameras
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/00234—Surgical instruments, devices or methods for minimally invasive surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/74—Manipulators with manual electric input means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/37—Surgical systems with images on a monitor during operation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/00234—Surgical instruments, devices or methods for minimally invasive surgery
- A61B2017/00292—Surgical instruments, devices or methods for minimally invasive surgery mounted on or guided by flexible, e.g. catheter-like, means
- A61B2017/003—Steerable
- A61B2017/00305—Constructional details of the flexible means
- A61B2017/00314—Separate linked members
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B2034/302—Surgical robots specifically adapted for manipulations within body cavities, e.g. within abdominal or thoracic cavities
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B2034/305—Details of wrist mechanisms at distal ends of robotic arms
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S901/00—Robots
- Y10S901/46—Sensing device
- Y10S901/47—Optical
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Engineering & Computer Science (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Heart & Thoracic Surgery (AREA)
- General Health & Medical Sciences (AREA)
- Biomedical Technology (AREA)
- Veterinary Medicine (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- Public Health (AREA)
- Robotics (AREA)
- Pathology (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Gynecology & Obstetrics (AREA)
- Radiology & Medical Imaging (AREA)
- Manipulator (AREA)
Abstract
Description
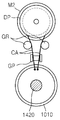
도 2는 도 1의 A부의 상세도이다.
도 3은 관절형 인스트루먼트의 일 실시예의 구성도이다.
도 4는 팔꿈치 관절부의 관절 구조의 일 예를 도시한 구성도이다.
도 5는 도 4에 도시된 팔꿈치 관절부의 관절 구조의 일 예에서 제2아암이 피벗된 상태를 도시한 구성도이다.
도 6은 팔꿈치 관절부를 구동하기 위한 구동구조의 일 예를 도시한 구성도이다.
도 7은 와이어를 이용하여 수술 도구를 구동하기 위한 구조의 일 예를 도시한 구성도이다.
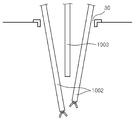
도 8은 비관절형 인스트루먼트의 일 실시예의 구성도이다.
도 9a는 멀티-포트 수술의 개념도이다.
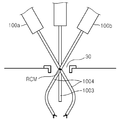
도 9b는 단일 통로 수술의 경우 두 개의 비관절형 인스트루먼트가 삼각형 구조를 형성하는 모습을 보여주는 도면이다.
도 9c는 단일 통로 수술의 경우 두 개의 구부러진 인스트루먼트가 삼각형 구조를 형성하는 모습을 보여주는 도면이다.
도 9d는 두 개의 구부러진 인스트루먼트를 채용하는 싱글 포트 수술에서 작업 자유도가 제한되는 모습을 보여주는 도면이다.
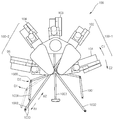
도 10은 비관절형 인스트루먼트와 관절형 인스트루먼트를 채용한 로봇 아암 유닛의 일 실시예의 사시도이다.
10 : 위치조정유닛 11: 수직 컬럼
12 : 승강 블록 13 : 위치조정아암
14 : 수술 테이블 21 : 영상표시유닛
22 : 조작유닛 30 : 절개부
100 : 로봇 아암 유닛 100-1, 100-2 : 제1, 제2아암 모듈
101~105 : 로봇 아암 1001 : 관절형 인스트루먼트
1002 : 비관절형 인스트루먼트 1003 : 내시경 카메라
1600 : 팔꿈치 관절부
Claims (13)
- 단일 통로 수술용 수술 로봇 시스템으로서,
관절형 인스트루먼트가 장착되고, 상기 관절형 인스트루먼트에 RCM을 기준으로 하는 운동 변위를 제공하는 제1로봇 아암;
상기 제1로봇 아암과 짝을 이루며, 비관절형 인스트루먼트가 장착되고, 상기 비관절형 인스트루먼트에 RCM을 기준으로 하는 운동 변위를 제공하는 제2로봇 아암;을 포함하는 수술 로봇 시스템. - 제1항에 있어서,
내시경 카메라가 장착되며, RCM을 기준으로 하는 운동 변위를 제공하는 제3로봇 아암;을 더 구비하며,
상기 제3로봇 아암은 상기 제2로봇 아암을 기준으로 하여 상기 제1로봇 아암의 반대쪽에 배치되는 수술 로봇 시스템. - 제1항에 있어서,
상기 제1로봇 아암과 상기 제2로봇 아암은 제1아암 모듈을 형성하며,
상기 제1아암 모듈과 대칭적 구조를 갖는 제2아암 모듈;을 더 구비하는 수술 로봇 시스템. - 제3항에 있어서,
상기 제1아암 모듈과 상기 제2아암 모듈은 각각의 제2로봇 아암끼리 서로 인접하게 배치되는 수술 로봇 시스템. - 제3항에 있어서,
내시경 카메라가 장착되며, RCM 운동 변위를 제공하는 제3로봇 아암;을 더 구비하며,
상기 제3로봇 아암은 제1아암 모듈과 상기 제2아암 모듈 사이에 배치되는 수술 로봇 시스템. - 제1항 내지 제5항 중 어느 한 항에 있어서,
상기 비관절형 인스트루먼트는 직선형 인스트루먼트인 수술 로봇 시스템. - 단일 통로 수술용 수술 로봇 시스템으로서,
팔꿈치 관절부를 구비하는 관절형 인스트루먼트가 장착되는 제1로봇 아암;
상기 제1로봇 아암과 짝을 이루며, 직선형 인스트루먼트가 장착되는 제2로봇 아암;을 포함하여,
상기 관절형 인스트루먼트와 상기 직선형 인스트루먼트는 피검체 내부에 삽입되어 삼각형 구조를 형성하는 수술 로봇 시스템. - 제7항에 있어서,
상기 제1로봇 아암과 상기 제2로봇 아암은 제1아암 모듈을 형성하며,
상기 제1아암 모듈과 대칭적 구조를 갖는 제2아암 모듈;을 더 구비하는 수술 로봇 시스템. - 제8항에 있어서,
상기 제1아암 모듈과 상기 제2아암 모듈은 각각의 제2로봇 아암끼리 서로 인접하게 배치되는 수술 로봇 시스템. - 제7항 내지 제9항 중 어느 한 항에 있어서,
상기 제1, 제2로봇 아암은 각각 상기 관절형 인스트루먼트와 상기 직선형 인스트루먼트에 RCM을 기준으로 하는 운동 변위를 제공할 수 있다. - 단일 통로 수술 로봇 시스템의 작동 방법으로서,
관절형 인스트루먼트에 RCM을 기준으로 하여 운동 변화를 제공하는 제1로봇 아암과 비관절형 인스트루먼트에 RCM을 기준으로 하여 운동 변위를 제공하는 제2로봇 아암을 준비하는 단계;
단일의 통로를 통하여 상기 관절형 인스트루먼트와 비관절형 인스트루먼트를 피검체 내에 삽입하는 단계;
상기 관절형 인스트루먼트의 팔꿈치 관절부를 구부려 상기 비관절형 인스트루먼트와 함께 삼각형 구조를 형성하는 단계;를 포함하는 수술 로봇 시스템의 작동 방법. - 제11항에 있어서,
상기 비관절형 인스트루먼트를 그 길이 방향으로 직선적으로 이동시키는 단계;를 더 포함하는 수술 로봇 시스템. - 제11항 또는 제12항에 있어서,
상기 관절형 인스트루먼트를 RCM을 기준으로 하여 회동시키고 상기 팔꿈치 관절부를 구동하는 단계;를 포함하는 수술 로봇 시스템의 작동 방법.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020130025254A KR20140110620A (ko) | 2013-03-08 | 2013-03-08 | 수술 로봇 시스템 및 그 작동 방법 |
| US13/959,063 US9358075B2 (en) | 2013-03-08 | 2013-08-05 | Surgical robot system and method of operating the same |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020130025254A KR20140110620A (ko) | 2013-03-08 | 2013-03-08 | 수술 로봇 시스템 및 그 작동 방법 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20140110620A true KR20140110620A (ko) | 2014-09-17 |
Family
ID=51488729
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020130025254A Ceased KR20140110620A (ko) | 2013-03-08 | 2013-03-08 | 수술 로봇 시스템 및 그 작동 방법 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US9358075B2 (ko) |
| KR (1) | KR20140110620A (ko) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US12171460B2 (en) | 2020-12-29 | 2024-12-24 | Industrial Technology Research Institute | Computer-assisted needle insertion system and computer-assisted needle insertion method |
| WO2025110832A1 (ko) * | 2023-11-24 | 2025-05-30 | 주식회사 로엔서지컬 | 수술 로봇 시스템 |
Families Citing this family (148)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8219178B2 (en) | 2007-02-16 | 2012-07-10 | Catholic Healthcare West | Method and system for performing invasive medical procedures using a surgical robot |
| US10357184B2 (en) | 2012-06-21 | 2019-07-23 | Globus Medical, Inc. | Surgical tool systems and method |
| US9782229B2 (en) | 2007-02-16 | 2017-10-10 | Globus Medical, Inc. | Surgical robot platform |
| US10653497B2 (en) | 2006-02-16 | 2020-05-19 | Globus Medical, Inc. | Surgical tool systems and methods |
| US10893912B2 (en) | 2006-02-16 | 2021-01-19 | Globus Medical Inc. | Surgical tool systems and methods |
| US9308050B2 (en) | 2011-04-01 | 2016-04-12 | Ecole Polytechnique Federale De Lausanne (Epfl) | Robotic system and method for spinal and other surgeries |
| US11399900B2 (en) | 2012-06-21 | 2022-08-02 | Globus Medical, Inc. | Robotic systems providing co-registration using natural fiducials and related methods |
| US11864839B2 (en) | 2012-06-21 | 2024-01-09 | Globus Medical Inc. | Methods of adjusting a virtual implant and related surgical navigation systems |
| US10758315B2 (en) | 2012-06-21 | 2020-09-01 | Globus Medical Inc. | Method and system for improving 2D-3D registration convergence |
| US10231791B2 (en) | 2012-06-21 | 2019-03-19 | Globus Medical, Inc. | Infrared signal based position recognition system for use with a robot-assisted surgery |
| US12472008B2 (en) | 2012-06-21 | 2025-11-18 | Globus Medical, Inc. | Robotic fluoroscopic navigation |
| US12220120B2 (en) | 2012-06-21 | 2025-02-11 | Globus Medical, Inc. | Surgical robotic system with retractor |
| US12329593B2 (en) | 2012-06-21 | 2025-06-17 | Globus Medical, Inc. | Surgical robotic automation with tracking markers |
| US10136954B2 (en) | 2012-06-21 | 2018-11-27 | Globus Medical, Inc. | Surgical tool systems and method |
| US11298196B2 (en) | 2012-06-21 | 2022-04-12 | Globus Medical Inc. | Surgical robotic automation with tracking markers and controlled tool advancement |
| US11607149B2 (en) | 2012-06-21 | 2023-03-21 | Globus Medical Inc. | Surgical tool systems and method |
| US12004905B2 (en) | 2012-06-21 | 2024-06-11 | Globus Medical, Inc. | Medical imaging systems using robotic actuators and related methods |
| US11045267B2 (en) | 2012-06-21 | 2021-06-29 | Globus Medical, Inc. | Surgical robotic automation with tracking markers |
| US12446981B2 (en) | 2012-06-21 | 2025-10-21 | Globus Medical, Inc. | System and method for surgical tool insertion using multiaxis force and moment feedback |
| US10624710B2 (en) | 2012-06-21 | 2020-04-21 | Globus Medical, Inc. | System and method for measuring depth of instrumentation |
| US11116576B2 (en) | 2012-06-21 | 2021-09-14 | Globus Medical Inc. | Dynamic reference arrays and methods of use |
| US12594001B2 (en) | 2012-06-21 | 2026-04-07 | Globus Medical, Inc. | Apparatus for recording probe movement |
| US11395706B2 (en) | 2012-06-21 | 2022-07-26 | Globus Medical Inc. | Surgical robot platform |
| US12262954B2 (en) | 2012-06-21 | 2025-04-01 | Globus Medical, Inc. | Surgical robotic automation with tracking markers |
| US11857149B2 (en) | 2012-06-21 | 2024-01-02 | Globus Medical, Inc. | Surgical robotic systems with target trajectory deviation monitoring and related methods |
| US11857266B2 (en) | 2012-06-21 | 2024-01-02 | Globus Medical, Inc. | System for a surveillance marker in robotic-assisted surgery |
| US11864745B2 (en) | 2012-06-21 | 2024-01-09 | Globus Medical, Inc. | Surgical robotic system with retractor |
| US11253327B2 (en) | 2012-06-21 | 2022-02-22 | Globus Medical, Inc. | Systems and methods for automatically changing an end-effector on a surgical robot |
| US12310683B2 (en) | 2012-06-21 | 2025-05-27 | Globus Medical, Inc. | Surgical tool systems and method |
| US11793570B2 (en) | 2012-06-21 | 2023-10-24 | Globus Medical Inc. | Surgical robotic automation with tracking markers |
| US12465433B2 (en) | 2012-06-21 | 2025-11-11 | Globus Medical Inc. | Methods of adjusting a virtual implant and related surgical navigation systems |
| US11974822B2 (en) | 2012-06-21 | 2024-05-07 | Globus Medical Inc. | Method for a surveillance marker in robotic-assisted surgery |
| US11317971B2 (en) | 2012-06-21 | 2022-05-03 | Globus Medical, Inc. | Systems and methods related to robotic guidance in surgery |
| US20150032164A1 (en) | 2012-06-21 | 2015-01-29 | Globus Medical, Inc. | Methods for Performing Invasive Medical Procedures Using a Surgical Robot |
| US10350013B2 (en) | 2012-06-21 | 2019-07-16 | Globus Medical, Inc. | Surgical tool systems and methods |
| US9283048B2 (en) | 2013-10-04 | 2016-03-15 | KB Medical SA | Apparatus and systems for precise guidance of surgical tools |
| US10447947B2 (en) * | 2013-10-25 | 2019-10-15 | The University Of Akron | Multipurpose imaging and display system |
| WO2015107099A1 (en) | 2014-01-15 | 2015-07-23 | KB Medical SA | Notched apparatus for guidance of an insertable instrument along an axis during spinal surgery |
| US10039605B2 (en) | 2014-02-11 | 2018-08-07 | Globus Medical, Inc. | Sterile handle for controlling a robotic surgical system from a sterile field |
| EP3134022B1 (en) | 2014-04-24 | 2018-01-10 | KB Medical SA | Surgical instrument holder for use with a robotic surgical system |
| ES2964307T3 (es) | 2014-05-05 | 2024-04-05 | Vicarious Surgical Inc | Dispositivo quirúrgico de realidad virtual |
| WO2016008880A1 (en) | 2014-07-14 | 2016-01-21 | KB Medical SA | Anti-skid surgical instrument for use in preparing holes in bone tissue |
| WO2016087539A2 (en) | 2014-12-02 | 2016-06-09 | KB Medical SA | Robot assisted volume removal during surgery |
| US10013808B2 (en) | 2015-02-03 | 2018-07-03 | Globus Medical, Inc. | Surgeon head-mounted display apparatuses |
| WO2016131903A1 (en) | 2015-02-18 | 2016-08-25 | KB Medical SA | Systems and methods for performing minimally invasive spinal surgery with a robotic surgical system using a percutaneous technique |
| US10058394B2 (en) | 2015-07-31 | 2018-08-28 | Globus Medical, Inc. | Robot arm and methods of use |
| US10646298B2 (en) | 2015-07-31 | 2020-05-12 | Globus Medical, Inc. | Robot arm and methods of use |
| US10080615B2 (en) | 2015-08-12 | 2018-09-25 | Globus Medical, Inc. | Devices and methods for temporary mounting of parts to bone |
| WO2017037127A1 (en) | 2015-08-31 | 2017-03-09 | KB Medical SA | Robotic surgical systems and methods |
| US10034716B2 (en) | 2015-09-14 | 2018-07-31 | Globus Medical, Inc. | Surgical robotic systems and methods thereof |
| US9771092B2 (en) | 2015-10-13 | 2017-09-26 | Globus Medical, Inc. | Stabilizer wheel assembly and methods of use |
| US10117632B2 (en) | 2016-02-03 | 2018-11-06 | Globus Medical, Inc. | Portable medical imaging system with beam scanning collimator |
| US10448910B2 (en) | 2016-02-03 | 2019-10-22 | Globus Medical, Inc. | Portable medical imaging system |
| US11883217B2 (en) | 2016-02-03 | 2024-01-30 | Globus Medical, Inc. | Portable medical imaging system and method |
| US10842453B2 (en) | 2016-02-03 | 2020-11-24 | Globus Medical, Inc. | Portable medical imaging system |
| US11058378B2 (en) | 2016-02-03 | 2021-07-13 | Globus Medical, Inc. | Portable medical imaging system |
| US10866119B2 (en) | 2016-03-14 | 2020-12-15 | Globus Medical, Inc. | Metal detector for detecting insertion of a surgical device into a hollow tube |
| EP3241518B1 (en) | 2016-04-11 | 2024-10-23 | Globus Medical, Inc | Surgical tool systems |
| US20180036086A1 (en) * | 2016-08-03 | 2018-02-08 | Amith Derek Mendonca | Novel robotic surgical device |
| CN106236267A (zh) * | 2016-08-18 | 2016-12-21 | 山东大学齐鲁医院 | 一种辅助微创外科手术机器人机械臂布置结构 |
| EP3360502A3 (en) | 2017-01-18 | 2018-10-31 | KB Medical SA | Robotic navigation of robotic surgical systems |
| EP3579736B1 (en) | 2017-02-09 | 2024-09-04 | Vicarious Surgical Inc. | Virtual reality surgical tools system |
| US11071594B2 (en) | 2017-03-16 | 2021-07-27 | KB Medical SA | Robotic navigation of robotic surgical systems |
| US11135015B2 (en) | 2017-07-21 | 2021-10-05 | Globus Medical, Inc. | Robot surgical platform |
| CN107184275B (zh) * | 2017-07-25 | 2018-09-14 | 吉林大学 | 一种用于辅助胸腹腔微创手术的机器人 |
| DE102017118126A1 (de) * | 2017-08-09 | 2019-02-14 | avateramedical GmBH | Robotisches Operationssystem |
| EP3681368A4 (en) | 2017-09-14 | 2021-06-23 | Vicarious Surgical Inc. | SURGICAL CAMERA SYSTEM WITH VIRTUAL REALITY |
| US11357548B2 (en) | 2017-11-09 | 2022-06-14 | Globus Medical, Inc. | Robotic rod benders and related mechanical and motor housings |
| US12544109B2 (en) | 2017-11-09 | 2026-02-10 | Globus Medical, Inc. | Robotic rod benders and related mechanical and motor housings |
| US11794338B2 (en) | 2017-11-09 | 2023-10-24 | Globus Medical Inc. | Robotic rod benders and related mechanical and motor housings |
| US10898252B2 (en) | 2017-11-09 | 2021-01-26 | Globus Medical, Inc. | Surgical robotic systems for bending surgical rods, and related methods and devices |
| US11134862B2 (en) | 2017-11-10 | 2021-10-05 | Globus Medical, Inc. | Methods of selecting surgical implants and related devices |
| CN108056823B (zh) * | 2017-12-27 | 2020-09-22 | 微创(上海)医疗机器人有限公司 | 手术机器人终端 |
| US20190254753A1 (en) | 2018-02-19 | 2019-08-22 | Globus Medical, Inc. | Augmented reality navigation systems for use with robotic surgical systems and methods of their use |
| CN108635054A (zh) * | 2018-03-06 | 2018-10-12 | 北京石油化工学院 | 可实现定点运动的远端运动中心机构 |
| US10573023B2 (en) | 2018-04-09 | 2020-02-25 | Globus Medical, Inc. | Predictive visualization of medical imaging scanner component movement |
| US11337742B2 (en) | 2018-11-05 | 2022-05-24 | Globus Medical Inc | Compliant orthopedic driver |
| CN109452974A (zh) * | 2018-11-15 | 2019-03-12 | 山东大学齐鲁医院 | 一种折叠式辅助微创外科单孔手术机器人 |
| US11278360B2 (en) | 2018-11-16 | 2022-03-22 | Globus Medical, Inc. | End-effectors for surgical robotic systems having sealed optical components |
| US11744655B2 (en) | 2018-12-04 | 2023-09-05 | Globus Medical, Inc. | Drill guide fixtures, cranial insertion fixtures, and related methods and robotic systems |
| US11602402B2 (en) | 2018-12-04 | 2023-03-14 | Globus Medical, Inc. | Drill guide fixtures, cranial insertion fixtures, and related methods and robotic systems |
| US11918313B2 (en) | 2019-03-15 | 2024-03-05 | Globus Medical Inc. | Active end effectors for surgical robots |
| US11571265B2 (en) | 2019-03-22 | 2023-02-07 | Globus Medical Inc. | System for neuronavigation registration and robotic trajectory guidance, robotic surgery, and related methods and devices |
| US11317978B2 (en) | 2019-03-22 | 2022-05-03 | Globus Medical, Inc. | System for neuronavigation registration and robotic trajectory guidance, robotic surgery, and related methods and devices |
| US20200297357A1 (en) | 2019-03-22 | 2020-09-24 | Globus Medical, Inc. | System for neuronavigation registration and robotic trajectory guidance, robotic surgery, and related methods and devices |
| US11806084B2 (en) | 2019-03-22 | 2023-11-07 | Globus Medical, Inc. | System for neuronavigation registration and robotic trajectory guidance, and related methods and devices |
| US11419616B2 (en) | 2019-03-22 | 2022-08-23 | Globus Medical, Inc. | System for neuronavigation registration and robotic trajectory guidance, robotic surgery, and related methods and devices |
| US11382549B2 (en) | 2019-03-22 | 2022-07-12 | Globus Medical, Inc. | System for neuronavigation registration and robotic trajectory guidance, and related methods and devices |
| US11045179B2 (en) | 2019-05-20 | 2021-06-29 | Global Medical Inc | Robot-mounted retractor system |
| US11628023B2 (en) | 2019-07-10 | 2023-04-18 | Globus Medical, Inc. | Robotic navigational system for interbody implants |
| US11571171B2 (en) | 2019-09-24 | 2023-02-07 | Globus Medical, Inc. | Compound curve cable chain |
| US12396692B2 (en) | 2019-09-24 | 2025-08-26 | Globus Medical, Inc. | Compound curve cable chain |
| US11864857B2 (en) | 2019-09-27 | 2024-01-09 | Globus Medical, Inc. | Surgical robot with passive end effector |
| US11426178B2 (en) | 2019-09-27 | 2022-08-30 | Globus Medical Inc. | Systems and methods for navigating a pin guide driver |
| US12408929B2 (en) | 2019-09-27 | 2025-09-09 | Globus Medical, Inc. | Systems and methods for navigating a pin guide driver |
| US11890066B2 (en) | 2019-09-30 | 2024-02-06 | Globus Medical, Inc | Surgical robot with passive end effector |
| US12329391B2 (en) | 2019-09-27 | 2025-06-17 | Globus Medical, Inc. | Systems and methods for robot-assisted knee arthroplasty surgery |
| US11510684B2 (en) | 2019-10-14 | 2022-11-29 | Globus Medical, Inc. | Rotary motion passive end effector for surgical robots in orthopedic surgeries |
| US12220176B2 (en) | 2019-12-10 | 2025-02-11 | Globus Medical, Inc. | Extended reality instrument interaction zone for navigated robotic |
| US11992373B2 (en) | 2019-12-10 | 2024-05-28 | Globus Medical, Inc | Augmented reality headset with varied opacity for navigated robotic surgery |
| US12133772B2 (en) | 2019-12-10 | 2024-11-05 | Globus Medical, Inc. | Augmented reality headset for navigated robotic surgery |
| US12064189B2 (en) | 2019-12-13 | 2024-08-20 | Globus Medical, Inc. | Navigated instrument for use in robotic guided surgery |
| US11382699B2 (en) | 2020-02-10 | 2022-07-12 | Globus Medical Inc. | Extended reality visualization of optical tool tracking volume for computer assisted navigation in surgery |
| US12414752B2 (en) | 2020-02-17 | 2025-09-16 | Globus Medical, Inc. | System and method of determining optimal 3-dimensional position and orientation of imaging device for imaging patient bones |
| US11207150B2 (en) | 2020-02-19 | 2021-12-28 | Globus Medical, Inc. | Displaying a virtual model of a planned instrument attachment to ensure correct selection of physical instrument attachment |
| US11253216B2 (en) | 2020-04-28 | 2022-02-22 | Globus Medical Inc. | Fixtures for fluoroscopic imaging systems and related navigation systems and methods |
| US11382700B2 (en) | 2020-05-08 | 2022-07-12 | Globus Medical Inc. | Extended reality headset tool tracking and control |
| US11510750B2 (en) | 2020-05-08 | 2022-11-29 | Globus Medical, Inc. | Leveraging two-dimensional digital imaging and communication in medicine imagery in three-dimensional extended reality applications |
| US11153555B1 (en) | 2020-05-08 | 2021-10-19 | Globus Medical Inc. | Extended reality headset camera system for computer assisted navigation in surgery |
| US11317973B2 (en) | 2020-06-09 | 2022-05-03 | Globus Medical, Inc. | Camera tracking bar for computer assisted navigation during surgery |
| US12070276B2 (en) | 2020-06-09 | 2024-08-27 | Globus Medical Inc. | Surgical object tracking in visible light via fiducial seeding and synthetic image registration |
| US11382713B2 (en) | 2020-06-16 | 2022-07-12 | Globus Medical, Inc. | Navigated surgical system with eye to XR headset display calibration |
| US11877807B2 (en) | 2020-07-10 | 2024-01-23 | Globus Medical, Inc | Instruments for navigated orthopedic surgeries |
| US11793588B2 (en) | 2020-07-23 | 2023-10-24 | Globus Medical, Inc. | Sterile draping of robotic arms |
| US12485542B2 (en) * | 2020-08-19 | 2025-12-02 | Beijing Surgerii Robotics Company Limited | Robot system and control method thereof |
| US11737831B2 (en) | 2020-09-02 | 2023-08-29 | Globus Medical Inc. | Surgical object tracking template generation for computer assisted navigation during surgical procedure |
| CN114191086B (zh) * | 2020-09-18 | 2025-11-14 | 上海微创医疗机器人(集团)股份有限公司 | 悬吊盘摆位机构及手术机器人 |
| US11523785B2 (en) | 2020-09-24 | 2022-12-13 | Globus Medical, Inc. | Increased cone beam computed tomography volume length without requiring stitching or longitudinal C-arm movement |
| US11911112B2 (en) | 2020-10-27 | 2024-02-27 | Globus Medical, Inc. | Robotic navigational system |
| US12076091B2 (en) | 2020-10-27 | 2024-09-03 | Globus Medical, Inc. | Robotic navigational system |
| US11941814B2 (en) | 2020-11-04 | 2024-03-26 | Globus Medical Inc. | Auto segmentation using 2-D images taken during 3-D imaging spin |
| USD1022197S1 (en) | 2020-11-19 | 2024-04-09 | Auris Health, Inc. | Endoscope |
| US11717350B2 (en) | 2020-11-24 | 2023-08-08 | Globus Medical Inc. | Methods for robotic assistance and navigation in spinal surgery and related systems |
| US12161433B2 (en) | 2021-01-08 | 2024-12-10 | Globus Medical, Inc. | System and method for ligament balancing with robotic assistance |
| US12150728B2 (en) | 2021-04-14 | 2024-11-26 | Globus Medical, Inc. | End effector for a surgical robot |
| US12178523B2 (en) | 2021-04-19 | 2024-12-31 | Globus Medical, Inc. | Computer assisted surgical navigation system for spine procedures |
| CN115429432B (zh) * | 2021-06-02 | 2025-09-30 | 上海微创医疗机器人(集团)股份有限公司 | 可读存储介质、手术机器人系统和调整系统 |
| US12458454B2 (en) | 2021-06-21 | 2025-11-04 | Globus Medical, Inc. | Gravity compensation of end effector arm for robotic surgical system |
| US12484969B2 (en) | 2021-07-06 | 2025-12-02 | Globdus Medical Inc. | Ultrasonic robotic surgical navigation |
| US11857273B2 (en) | 2021-07-06 | 2024-01-02 | Globus Medical, Inc. | Ultrasonic robotic surgical navigation |
| US11439444B1 (en) | 2021-07-22 | 2022-09-13 | Globus Medical, Inc. | Screw tower and rod reduction tool |
| US12213745B2 (en) | 2021-09-16 | 2025-02-04 | Globus Medical, Inc. | Extended reality systems for visualizing and controlling operating room equipment |
| US12184636B2 (en) | 2021-10-04 | 2024-12-31 | Globus Medical, Inc. | Validating credential keys based on combinations of credential value strings and input order strings |
| US12238087B2 (en) | 2021-10-04 | 2025-02-25 | Globus Medical, Inc. | Validating credential keys based on combinations of credential value strings and input order strings |
| US12444045B2 (en) | 2021-10-20 | 2025-10-14 | Globus Medical, Inc. | Interpolation of medical images |
| US20230165639A1 (en) | 2021-12-01 | 2023-06-01 | Globus Medical, Inc. | Extended reality systems with three-dimensional visualizations of medical image scan slices |
| US11918304B2 (en) | 2021-12-20 | 2024-03-05 | Globus Medical, Inc | Flat panel registration fixture and method of using same |
| US12544146B2 (en) | 2022-02-11 | 2026-02-10 | Globus Medical, Inc. | Apparatus and method for removing circular trackers attached to a tracking array |
| US12103480B2 (en) | 2022-03-18 | 2024-10-01 | Globus Medical Inc. | Omni-wheel cable pusher |
| US12048493B2 (en) | 2022-03-31 | 2024-07-30 | Globus Medical, Inc. | Camera tracking system identifying phantom markers during computer assisted surgery navigation |
| US12394086B2 (en) | 2022-05-10 | 2025-08-19 | Globus Medical, Inc. | Accuracy check and automatic calibration of tracked instruments |
| US12161427B2 (en) | 2022-06-08 | 2024-12-10 | Globus Medical, Inc. | Surgical navigation system with flat panel registration fixture |
| US20240020840A1 (en) | 2022-07-15 | 2024-01-18 | Globus Medical, Inc. | REGISTRATION OF 3D and 2D IMAGES FOR SURGICAL NAVIGATION AND ROBOTIC GUIDANCE WITHOUT USING RADIOPAQUE FIDUCIALS IN THE IMAGES |
| US12226169B2 (en) | 2022-07-15 | 2025-02-18 | Globus Medical, Inc. | Registration of 3D and 2D images for surgical navigation and robotic guidance without using radiopaque fiducials in the images |
| US12318150B2 (en) | 2022-10-11 | 2025-06-03 | Globus Medical Inc. | Camera tracking system for computer assisted surgery navigation |
| US12502220B2 (en) | 2022-11-15 | 2025-12-23 | Globus Medical, Inc. | Machine learning system for spinal surgeries |
| CN115847385B (zh) * | 2022-11-17 | 2025-03-18 | 上海微创医疗机器人(集团)股份有限公司 | 调整臂控制方法、装置、系统、计算机设备 |
| CN117359683A (zh) * | 2023-10-30 | 2024-01-09 | 北京跃维医疗科技有限公司 | 机械臂及机器人系统 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5454827A (en) * | 1994-05-24 | 1995-10-03 | Aust; Gilbert M. | Surgical instrument |
| US8004229B2 (en) * | 2005-05-19 | 2011-08-23 | Intuitive Surgical Operations, Inc. | Software center and highly configurable robotic systems for surgery and other uses |
| US7763015B2 (en) | 2005-01-24 | 2010-07-27 | Intuitive Surgical Operations, Inc. | Modular manipulator support for robotic surgery |
| US8551076B2 (en) * | 2006-06-13 | 2013-10-08 | Intuitive Surgical Operations, Inc. | Retrograde instrument |
| JP5258284B2 (ja) | 2007-12-28 | 2013-08-07 | テルモ株式会社 | 医療用マニピュレータ及び医療用ロボットシステム |
| US9259274B2 (en) * | 2008-09-30 | 2016-02-16 | Intuitive Surgical Operations, Inc. | Passive preload and capstan drive for surgical instruments |
| KR20110030034A (ko) | 2009-09-17 | 2011-03-23 | 주식회사 이턴 | 수술용 로봇 |
| US8260437B2 (en) * | 2009-10-28 | 2012-09-04 | New York University | Cochlear implant with improved electrode array and controller |
| KR101181569B1 (ko) | 2010-05-25 | 2012-09-10 | 정창욱 | 단일 통로 수술 모드와 다통로 수술 모드를 실현할 수 있는 수술용 로봇 시스템 및 그 제어 방법 |
| WO2013009887A1 (en) * | 2011-07-11 | 2013-01-17 | Board Of Regents Of The University Of Nebraska | Robotic surgical devices, systems and related methods |
-
2013
- 2013-03-08 KR KR1020130025254A patent/KR20140110620A/ko not_active Ceased
- 2013-08-05 US US13/959,063 patent/US9358075B2/en not_active Expired - Fee Related
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US12171460B2 (en) | 2020-12-29 | 2024-12-24 | Industrial Technology Research Institute | Computer-assisted needle insertion system and computer-assisted needle insertion method |
| WO2025110832A1 (ko) * | 2023-11-24 | 2025-05-30 | 주식회사 로엔서지컬 | 수술 로봇 시스템 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20140257328A1 (en) | 2014-09-11 |
| US9358075B2 (en) | 2016-06-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20140110620A (ko) | 수술 로봇 시스템 및 그 작동 방법 | |
| KR102038632B1 (ko) | 수술용 인스트루먼트, 서포터 장치, 및 수술 로봇 시스템 | |
| US11737846B2 (en) | Manual release assembly for robotic surgical tool | |
| JP5785538B2 (ja) | 腹腔鏡手術用のロボットシステム | |
| CN109788994B (zh) | 计算机辅助的远程操作手术系统和方法 | |
| US10624709B2 (en) | Robotic surgical tool with manual release lever | |
| KR101925398B1 (ko) | 다이렉트 풀 수술 기구를 위한 가위 편향 | |
| EP3906881B1 (en) | Surgical arm | |
| CA3004277C (en) | Articulated tool positioner and system employing same | |
| KR102330042B1 (ko) | 인장 밴드를 갖는 의료 도구 | |
| EP2429441B1 (en) | Remote centre of motion positioner | |
| EP2052675B1 (en) | A control assembly | |
| US20190239965A1 (en) | Jointed control platform | |
| KR20130132109A (ko) | 서포터 장치 및 이를 채용한 수술 로봇 시스템 | |
| KR101912717B1 (ko) | 수술 용구 및 이를 포함하는 매니플레이션 시스템 | |
| US20150005784A2 (en) | Device for Supporting and Positioning of a Surgical Instrument and/or an Endoscope for Use in Minimal-Invasive Surgery and a Surgical Robotic System | |
| CN108025445A (zh) | 机器人臂及机器人手术系统 | |
| US10813655B2 (en) | Manipulator | |
| GB2531994A (en) | Surgical articulation | |
| US11744444B2 (en) | Manipulator arm and patient-side system for surgical system | |
| CN217566304U (zh) | 具有图像系统的医疗机器人 | |
| US20250152263A1 (en) | Pulley supports for end effector wrists | |
| US20250025252A1 (en) | Surgical tools with end effector redirect pulleys | |
| RO131612A2 (ro) | Robot asistent modular |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
Patent event code: PA01091R01D Comment text: Patent Application Patent event date: 20130308 |
|
| PG1501 | Laying open of application | ||
| A201 | Request for examination | ||
| PA0201 | Request for examination |
Patent event code: PA02012R01D Patent event date: 20180308 Comment text: Request for Examination of Application Patent event code: PA02011R01I Patent event date: 20130308 Comment text: Patent Application |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20191211 Patent event code: PE09021S01D |
|
| E601 | Decision to refuse application | ||
| PE0601 | Decision on rejection of patent |
Patent event date: 20200213 Comment text: Decision to Refuse Application Patent event code: PE06012S01D Patent event date: 20191211 Comment text: Notification of reason for refusal Patent event code: PE06011S01I |