KR20150132603A - 자동화된 산업 차량들과 연관된 맵 데이터를 공유하기 위한 방법 및 장치 - Google Patents
자동화된 산업 차량들과 연관된 맵 데이터를 공유하기 위한 방법 및 장치 Download PDFInfo
- Publication number
- KR20150132603A KR20150132603A KR1020157032348A KR20157032348A KR20150132603A KR 20150132603 A KR20150132603 A KR 20150132603A KR 1020157032348 A KR1020157032348 A KR 1020157032348A KR 20157032348 A KR20157032348 A KR 20157032348A KR 20150132603 A KR20150132603 A KR 20150132603A
- Authority
- KR
- South Korea
- Prior art keywords
- vehicle
- map data
- data
- pose
- feature
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images






Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/20—Instruments for performing navigational calculations
- G01C21/206—Instruments for performing navigational calculations specially adapted for indoor navigation
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/28—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network with correlation of data from several navigational instruments
- G01C21/30—Map- or contour-matching
- G01C21/32—Structuring or formatting of map data
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F9/00—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes
- B66F9/06—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks
- B66F9/063—Automatically guided
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/38—Electronic maps specially adapted for navigation; Updating thereof
- G01C21/3804—Creation or updating of map data
- G01C21/3807—Creation or updating of map data characterised by the type of data
- G01C21/383—Indoor data
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/38—Electronic maps specially adapted for navigation; Updating thereof
- G01C21/3804—Creation or updating of map data
- G01C21/3833—Creation or updating of map data characterised by the source of data
- G01C21/3848—Data obtained from both position sensors and additional sensors
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/38—Electronic maps specially adapted for navigation; Updating thereof
- G01C21/3804—Creation or updating of map data
- G01C21/3859—Differential updating map data
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/38—Electronic maps specially adapted for navigation; Updating thereof
- G01C21/3885—Transmission of map data to client devices; Reception of map data by client devices
- G01C21/3896—Transmission of map data from central databases
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/89—Radar or analogous systems specially adapted for specific applications for mapping or imaging
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0231—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means
- G05D1/0238—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using obstacle or wall sensors
- G05D1/024—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using obstacle or wall sensors in combination with a laser
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0231—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means
- G05D1/0246—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using a video camera in combination with image processing means
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0255—Control of position or course in two dimensions specially adapted to land vehicles using acoustic signals, e.g. ultra-sonic singals
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0268—Control of position or course in two dimensions specially adapted to land vehicles using internal positioning means
- G05D1/0272—Control of position or course in two dimensions specially adapted to land vehicles using internal positioning means comprising means for registering the travel distance, e.g. revolutions of wheels
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0268—Control of position or course in two dimensions specially adapted to land vehicles using internal positioning means
- G05D1/0274—Control of position or course in two dimensions specially adapted to land vehicles using internal positioning means using mapping information stored in a memory device
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0287—Control of position or course in two dimensions specially adapted to land vehicles involving a plurality of land vehicles, e.g. fleet or convoy travelling
- G05D1/0291—Fleet control
- G05D1/0297—Fleet control by controlling means in a control room
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/60—Intended control result
- G05D1/69—Coordinated control of the position or course of two or more vehicles
- G05D1/692—Coordinated control of the position or course of two or more vehicles involving a plurality of disparate vehicles
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D2111/00—Details of signals used for control of position, course, altitude or attitude of land, water, air or space vehicles
- G05D2111/10—Optical signals
- G05D2111/17—Coherent light, e.g. laser signals
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D2111/00—Details of signals used for control of position, course, altitude or attitude of land, water, air or space vehicles
- G05D2111/20—Acoustic signals, e.g. ultrasonic signals
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D2111/00—Details of signals used for control of position, course, altitude or attitude of land, water, air or space vehicles
- G05D2111/50—Internal signals, i.e. from sensors located in the vehicle, e.g. from compasses or angular sensors
-
- G05D2201/0216—
Landscapes
- Engineering & Computer Science (AREA)
- Remote Sensing (AREA)
- Radar, Positioning & Navigation (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Structural Engineering (AREA)
- Transportation (AREA)
- Aviation & Aerospace Engineering (AREA)
- Databases & Information Systems (AREA)
- Mechanical Engineering (AREA)
- Civil Engineering (AREA)
- Life Sciences & Earth Sciences (AREA)
- Geology (AREA)
- Electromagnetism (AREA)
- Computer Networks & Wireless Communication (AREA)
- Navigation (AREA)
- Forklifts And Lifting Vehicles (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
- Traffic Control Systems (AREA)
- Optics & Photonics (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Multimedia (AREA)
- Acoustics & Sound (AREA)
Abstract
Description
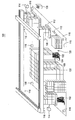
도 2는 하나 이상의 실시예들에 따라 다양한 작업들을 실행하기 위해 물리적인 환경을 다루기 위한 지게차의 투시도를 도시한 도면.
도 3은 하나 이상의 실시예들에 따라 산업 차량을 업데이트하고 상기 산업 차량을 위해 공유하는, 맵 생성을 제공하기 위한 시스템의 구조적인 블록도.
도 4는 하나 이상의 실시예들에 따라 산업 차량을 업데이트하고 상기 산업 차량을 위해 공유하는, 맵 생성을 제공하기 위한 시스템의 기능적인 블록도.
도 5는 하나 이상의 실시예들에 따른 산업 차량에 대한 위치 추정 및 매핑 처리(localization and mapping process)를 도시하는 상호작용도.
도 6은 하나 이상의 실시예들에 따른 산업 차량들과 연관된 로컬 맵 모듈의 동작의 방법의 흐름도.
도 7은 하나 이상의 실시예들에 따른 글로벌 맵 모듈에 대한 동작의 방법의 흐름도.
104: 모바일 컴퓨터 106: 중앙 컴퓨터
108: 센서 어레이 110: 바닥
112: 팰릿 116: 복수의 마커들
200: 지게차 202: 카메라
204: 평면의 레이저 스캐너 206: 인코더
208: 바퀴 302: 네트워크
304, 322: 중앙 처리 유닛 306. 324: 보조 회로들
308, 326: 메모리
320: 환경 기반 조종 모듈 328: 글로벌 맵 모듈
332: 복수의 센서 디바이스들 338: 로컬 맵 모듈
402: 위치 추정 모듈 404: 맵 모듈
408: 정정 모듈 410: 차량 제어기
414: 필터 416: 특징 추출 모듈
420: 특징 선택 모듈 426: 랜드마크 확장 모듈
500: 위치 추정 및 매핑 시스템 512: 맵 매니저
Claims (22)
- 차량 중심 측정을 통해 로컬 맵 특징을 구성하는 방법에 있어서:
글로벌 맵 데이터의 전체 좌표계에 대해 네비게이션가능한(navigable) 자동화된 유도 차량의 위치를 나타내는 차량 포즈(pose)를 제공하는 단계로서, 상기 네비게이션가능한 자동화된 유도 차량은 하나 이상의 센서들을 포함하는, 상기 차량 포즈를 제공하는 단계;
상기 네비게이션가능한 자동화된 유도 차량과 연관된 메모리 상에 로컬 맵 데이터를 제공하는 단계로서, 상기 로컬 맵 데이터는 특징 정보 및 랜드마크 데이터를 포함하는, 상기 로컬 맵 데이터를 제공하는 단계;
상기 하나 이상의 센서들로, 상기 네비게이션가능한 자동화된 차량에 인접한 물리적인 환경 내의 하나 이상의 오브젝트들(objects)을 나타내는 차량 중심 측정 데이터를 캡쳐하는 단계로서, 상기 하나 이상의 오브젝트들은 상기 물리적인 환경 내에서 변화하는 오브젝트를 포함하는, 상기 차량 중심 측정 데이터를 캡쳐하는 단계;
적어도 하나의 처리기로 자동적으로, 상기 차량 포즈 상에 상기 차량 중심 측정 데이터를 중첩시킴으로써 상기 전체 좌표계에 대한 상기 오브젝트의 위치, 상기 오브젝트의 방향, 또는 둘 모두를 나타내는 동적인 특징 포즈를 결정하는 단계; 및
상기 동적인 특징 포즈로 상기 로컬 맵의 특징 정보를 업데이트하는 단계를 포함하는, 차량 중심 측정을 통해 로컬 맵 특징을 구성하는 방법. - 제 1 항에 있어서,
상기 자동화된 유도 차량은 트랜스폰더(transponder)를 포함하고, 상기 차량 포즈는 상기 트랜스폰더를 통해 제공되는, 차량 중심 측정을 통해 로컬 맵 특징을 구성하는 방법. - 제 1 항에 있어서,
차량 중심 특징 세트로 상기 차량 중심 측정 데이터를 변환시키는 단계; 및
상기 차량 중심 특징 세트에 기초하여 상기 차량 포즈를 결정하는 단계를 추가로 포함하는, 차량 중심 측정을 통해 로컬 맵 특징을 구성하는 방법. - 제 3 항에 있어서,
상기 하나 이상의 센서들, 상기 차량 포즈, 또는 둘 모두의 에러를 나타내는 동적인 특징 포즈 불확실성을 결정하는 단계를 추가로 포함하는, 차량 중심 측정을 통해 로컬 맵 특징을 구성하는 방법. - 제 3 항에 있어서,
상기 자동화된 유도 차량으로부터 원격으로 위치된 중앙 컴퓨터에 상기 동적인 특징 포즈를 전달하는 단계를 추가로 포함하는, 차량 중심 측정을 통해 로컬 맵 특징을 구성하는 방법. - 제 1 항에 있어서,
상기 글로벌 맵 데이터로부터 새로운 특징, 새로운 랜드마크 또는 둘 모두를 수신하는 단계로서, 상기 글로벌 맵 데이터는 상기 자동화된 유도 차량으로부터 원격으로 위치된 중앙 컴퓨터 상에 저장되는, 상기 수신하는 단계;
상기 글로벌 맵 데이터로부터의 상기 새로운 특징, 상기 글로벌 맵 데이터로부터의 상기 새로운 랜드마크 또는 둘 모두에 따라 상기 로컬 맵 데이터의 특징 정보, 상기 로컬 맵 데이터의 랜드마크 데이터 또는 둘 모두를 업데이트하는 단계; 및
동일한 동적인 특징 포즈를 결정하는 다른 차량 포즈 상에 차량 중심 측정 데이터의 다른 중첩을 통해 갱신되지 않으면, 선다운 시간 기간 후 로컬 맵으로부터 동적 특징 포즈를 제거하는 단계를 추가로 포함하는, 차량 중심 측정을 통해 로컬 맵 특징을 구성하는 방법. - 제 1 항에 있어서,
상기 랜드마크 데이터는 팰릿(pallet)의 존재를 나타내는 슬롯 점유 데이터를 포함하고, 상기 방법은 또한 팰릿 특징이 상기 로컬 맵 데이터의 특징 정보와 연관되도록 상기 메모리에 상기 팰릿을 나타내는 상기 팰릿 특징을 저장하는 단계를 포함하는, 차량 중심 측정을 통해 로컬 맵 특징을 구성하는 방법. - 제 3 항에 있어서,
상기 차량 포즈 및 상기 하나 이상의 센서들의 관측가능한 영역에 기초하여 상기 특징 정보, 상기 랜드마크 데이터, 또는 둘 모두의 보이지 않는 부분을 결정하는 단계; 및
분할된 맵 데이터로 상기 로컬 맵 데이터를 분할하는 단계로서, 상기 분할된 맵 데이터는 상기 보이지 않는 부분을 포함하지 않는, 상기 로컬 맵 데이터를 분할하는 단계를 추가로 포함하는, 차량 중심 측정을 통해 로컬 맵 특징을 구성하는 방법. - 제 8 항에 있어서,
차량 중심 특징 세트로 상기 차량 중심 측정 데이터를 변환시키는 단계; 및
상기 차량 중심 특징 세트 및 상기 분할된 맵 데이터에 기초하여 상기 전체 좌표계에 대해 상기 자동화된 유도 차량의 새로운 위치를 나타내는 다음 차량 포즈를 결정하는 단계를 추가로 포함하는, 차량 중심 측정을 통해 로컬 맵 특징을 구성하는 방법. - 제 8 항에 있어서,
상기 하나 이상의 센서들은 카메라를 포함하는, 차량 중심 측정을 통해 로컬 맵 특징을 구성하는 방법. - 제 8 항에 있어서,
상기 하나 이상의 센서들은 상기 자동화된 유도 차량의 하나 이상의 측들에 결합된 평면의 레이저 스캐너를 포함하는, 차량 중심 측정을 통해 로컬 맵 특징을 구성하는 방법. - 제 8 항에 있어서,
상기 하나 이상의 센서들은 상기 자동화된 유도 차량의 바퀴에 부착된 인코더를 포함하는, 차량 중심 측정을 통해 로컬 맵 특징을 구성하는 방법. - 제 8 항에 있어서,
상기 자동화된 유도 차량은 지게차를 포함하는, 차량 중심 측정을 통해 로컬 맵 특징을 구성하는 방법. - 제 8 항에 있어서,
상기 물리적인 환경은 창고 또는 냉장실을 포함하는, 차량 중심 측정을 통해 로컬 맵 특징을 구성하는 방법. - 차량 중심 측정을 통해 차량 위치를 결정하는 방법에 있어서:
글로벌 맵 데이터의 전체 좌표계에 대해 자동화된 유도 차량의 위치를 나타내는 차량 포즈를 제공하는 단계로서, 상기 자동화된 유도 차량은 하나 이상의 센서들을 포함하는, 상기 차량 포즈를 제공하는 단계;
상기 자동화된 유도 차량과 연관된 메모리 상에 로컬 맵 데이터를 제공하는 단계로서, 상기 로컬 맵 데이터는 랜드마크 데이터를 포함하는, 상기 로컬 맵 데이터를 제공하는 단계;
상기 자동화된 유도 차량의 하나 이상의 센서들의 보이는 범위를 나타내는 관측가능한 영역을 제공하는 단계;
상기 차량 포즈 및 상기 하나 이상의 센서들의 관측가능한 영역에 기초하여 상기 랜드마크 데이터의 보이지 않는 부분을 결정하는 단계로서, 상기 보이지 않는 부분은 상기 관측가능한 영역 외부에 있는 것인, 상기 보이지 않는 부분을 결정하는 단계;
분할된 맵 데이터로 상기 로컬 맵 데이터를 분할하는 단계로서, 상기 분할된 맵 데이터는 상기 보이지 않는 부분을 포함하지 않는, 상기 로컬 맵 데이터를 분할하는 단계;
상기 하나 이상의 센서들로 차량 중심 측정 데이터를 캡쳐하는 단계로서, 상기 차량 중심 측정 데이터는 물리적인 환경 내의 오브젝트를 나타내는, 상기 차량 중심 측정 데이터를 캡쳐하는 단계;
차량 중심 특징 세트로 상기 차량 중심 측정 데이터를 변환시키는 단계; 및
적어도 하나의 처리기로 자동적으로, 상기 차량 중심 특징 세트 및 상기 분할된 맵 데이터에 기초하여 상기 전체 좌표계에 대해 상기 자동화된 유도 차량의 위치를 나타내는 다음 차량 포즈를 결정하는 단계를 포함하는, 차량 중심 측정을 통해 차량 위치를 결정하는 방법. - 제 15 항에 있어서,
상기 자동화된 유도 차량은 트랜스폰더를 포함하고, 상기 차량 포즈는 상기 트랜스폰더를 통해 제공되는, 차량 중심 측정을 통해 차량 위치를 결정하는 방법. - 제 15 항에 있어서,
상기 전체 좌표계에 대해 상기 오브젝트의 위치, 상기 오브젝트의 방향, 또는 둘 모두를 나타내는 특징 포즈 및 상기 측정 데이터의 에러를 나타내는 특징 포즈 불확실성으로 상기 차량 중심 측정 데이터를 변환시키는 단계;
상기 자동화된 유도 차량으로부터 원격으로 위치된 중앙 컴퓨터에 상기 특징 포즈, 상기 특징 포즈 불확실성, 또는 둘 모두를 전달하는 단계; 및
상기 특징 포즈, 상기 특징 포즈 불확실성, 또는 둘 모두에 따라 상기 글로벌 맵 데이터를 업데이트하는 단계로서, 상기 글로벌 맵 데이터는 상기 중앙 컴퓨터와 연관된 메모리 상에 저장되는, 상기 글로벌 맵 데이터를 업데이트하는 단계를 추가로 포함하는, 차량 중심 측정을 통해 차량 위치를 결정하는 방법. - 제 15 항에 있어서,
상기 랜드마크 데이터는 팰릿의 존재를 나타내는 슬롯 점유 데이터를 포함하는, 차량 중심 측정을 통해 차량 위치를 결정하는 방법. - 제 18 항에 있어서,
상기 슬롯 점유 데이터가 상기 팰릿의 존재를 나타낼 때, 팰릿 특징이 상기 로컬 맵 데이터의 특징 정보와 연관되도록 상기 자동화된 유도 차량에 결합된 메모리에 상기 팰릿을 나타내는 상기 팰릿 특징을 저장하는 단계를 추가로 포함하는, 차량 중심 측정을 통해 차량 위치를 결정하는 방법. - 제 15 항에 있어서,
상기 오브젝트는 상기 물리적인 환경 내에서 변화하는, 차량 중심 측정을 통해 차량 위치를 결정하는 방법. - 제 20 항에 있어서,
상기 오브젝트는 팰릿인 것인, 차량 중심 측정을 통해 차량 위치를 결정하는 방법. - 제 20 항에 있어서,
중첩된 결과를 생성하기 위해 상기 차량 포즈 또는 상기 다음 차량 포즈 상에 상기 차량 중심 측정 데이터를 중첩시키는 단계; 및
상기 중첩된 결과에 기초하여, 전체 좌표계에 대해 상기 오브젝트의 위치, 상기 오브젝트의 방향, 또는 둘 모두를 나타내는 동적인 특징 포즈를 결정하는 단계를 추가로 포함하는, 차량 중심 측정을 통해 차량 위치를 결정하는 방법.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US13/159,500 US8594923B2 (en) | 2011-06-14 | 2011-06-14 | Method and apparatus for sharing map data associated with automated industrial vehicles |
| US13/159,500 | 2011-06-14 | ||
| PCT/NZ2012/000092 WO2012173497A1 (en) | 2011-06-14 | 2012-06-08 | Method and apparatus for sharing map data associated with automated industrial vehicles |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020137033174A Division KR101589943B1 (ko) | 2011-06-14 | 2012-06-08 | 자동화된 산업 차량들과 연관된 맵 데이터를 공유하기 위한 방법 및 장치 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20150132603A true KR20150132603A (ko) | 2015-11-25 |
| KR101663977B1 KR101663977B1 (ko) | 2016-10-12 |
Family
ID=46634489
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020157032348A Expired - Fee Related KR101663977B1 (ko) | 2011-06-14 | 2012-06-08 | 자동화된 산업 차량들과 연관된 맵 데이터를 공유하기 위한 방법 및 장치 |
| KR1020137033174A Expired - Fee Related KR101589943B1 (ko) | 2011-06-14 | 2012-06-08 | 자동화된 산업 차량들과 연관된 맵 데이터를 공유하기 위한 방법 및 장치 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020137033174A Expired - Fee Related KR101589943B1 (ko) | 2011-06-14 | 2012-06-08 | 자동화된 산업 차량들과 연관된 맵 데이터를 공유하기 위한 방법 및 장치 |
Country Status (9)
| Country | Link |
|---|---|
| US (1) | US8594923B2 (ko) |
| EP (1) | EP2721374B1 (ko) |
| KR (2) | KR101663977B1 (ko) |
| CN (1) | CN103582803B (ko) |
| AU (1) | AU2012269800B2 (ko) |
| BR (1) | BR112013030722A2 (ko) |
| CA (1) | CA2834932C (ko) |
| RU (1) | RU2587641C2 (ko) |
| WO (1) | WO2012173497A1 (ko) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20190003808A (ko) * | 2016-05-23 | 2019-01-09 | 크라운 이큅먼트 코포레이션 | 창고 환경에서의 자재 핸들링 차량의 사용을 위한 시스템들 및 방법들 |
| KR20210038538A (ko) * | 2018-08-01 | 2021-04-07 | 크라운 이큅먼트 코포레이션 | 창고 환경 속도 구역 관리를 위한 시스템 및 방법 |
Families Citing this family (104)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8902080B2 (en) * | 2009-04-07 | 2014-12-02 | Mitsubishi Electric Corporation | Vehicle-mounted narrow-band wireless communication apparatus and roadside-to-vehicle narrow-band wireless communication system |
| US8508590B2 (en) * | 2010-03-02 | 2013-08-13 | Crown Equipment Limited | Method and apparatus for simulating a physical environment to facilitate vehicle operation and task completion |
| US8538577B2 (en) * | 2010-03-05 | 2013-09-17 | Crown Equipment Limited | Method and apparatus for sensing object load engagement, transportation and disengagement by automated vehicles |
| KR102041093B1 (ko) | 2011-04-11 | 2019-11-06 | 크라운 이큅먼트 코포레이션 | 조정된 경로 계획기를 사용하는 다수의 자동화 비-홀로노믹 차량들을 효율적으로 스케줄링하는 방법 및 장치 |
| US8655588B2 (en) | 2011-05-26 | 2014-02-18 | Crown Equipment Limited | Method and apparatus for providing accurate localization for an industrial vehicle |
| WO2012166970A1 (en) * | 2011-05-31 | 2012-12-06 | John Bean Technologies Corporation | Deep lane navigation system for automatic guided vehicles |
| US8548671B2 (en) | 2011-06-06 | 2013-10-01 | Crown Equipment Limited | Method and apparatus for automatically calibrating vehicle parameters |
| US8594923B2 (en) | 2011-06-14 | 2013-11-26 | Crown Equipment Limited | Method and apparatus for sharing map data associated with automated industrial vehicles |
| US8589012B2 (en) * | 2011-06-14 | 2013-11-19 | Crown Equipment Limited | Method and apparatus for facilitating map data processing for industrial vehicle navigation |
| US20140058634A1 (en) | 2012-08-24 | 2014-02-27 | Crown Equipment Limited | Method and apparatus for using unique landmarks to locate industrial vehicles at start-up |
| US9056754B2 (en) | 2011-09-07 | 2015-06-16 | Crown Equipment Limited | Method and apparatus for using pre-positioned objects to localize an industrial vehicle |
| US8798840B2 (en) | 2011-09-30 | 2014-08-05 | Irobot Corporation | Adaptive mapping with spatial summaries of sensor data |
| DE102012217085A1 (de) * | 2012-09-21 | 2014-05-28 | Continental Automotive Gmbh | Kommunikationssystem |
| US20140249771A1 (en) * | 2013-03-01 | 2014-09-04 | Xue Yang | Location estimation using a mobile device |
| DE102013211109A1 (de) * | 2013-06-14 | 2014-12-31 | Robert Bosch Gmbh | Assistenzvorrichtung und Verfahren zum Unterstützen eines Fahrers des Fahrzeugs |
| US9354070B2 (en) | 2013-10-31 | 2016-05-31 | Crown Equipment Corporation | Systems, methods, and industrial vehicles for determining the visibility of features |
| DE102014202313A1 (de) * | 2014-02-07 | 2015-08-13 | Robert Bosch Gmbh | Verfahren zum Übertragen eines Umgebungsmodells |
| US9886036B2 (en) | 2014-02-10 | 2018-02-06 | John Bean Technologies Corporation | Routing of automated guided vehicles |
| US10266280B2 (en) * | 2014-06-23 | 2019-04-23 | Sikorsky Aircraft Corporation | Cooperative safe landing area determination |
| US9733646B1 (en) | 2014-11-10 | 2017-08-15 | X Development Llc | Heterogeneous fleet of robots for collaborative object processing |
| US10022867B2 (en) * | 2014-11-11 | 2018-07-17 | X Development Llc | Dynamically maintaining a map of a fleet of robotic devices in an environment to facilitate robotic action |
| US9465390B2 (en) | 2014-11-11 | 2016-10-11 | Google Inc. | Position-controlled robotic fleet with visual handshakes |
| CN111380545B (zh) * | 2015-02-10 | 2024-11-12 | 御眼视觉技术有限公司 | 用于自主车辆导航的方法、服务器、自主车辆以及介质 |
| US9864371B2 (en) | 2015-03-10 | 2018-01-09 | John Bean Technologies Corporation | Automated guided vehicle system |
| AU2016268034B2 (en) * | 2015-05-26 | 2018-02-08 | Crown Equipment Corporation | Systems and methods for materials handling vehicle odometry calibration |
| CN106371452B (zh) * | 2015-07-24 | 2020-08-25 | 深圳市道通智能航空技术有限公司 | 一种飞行器限飞区域信息的获取、共享方法、装置及系统 |
| JP6571462B2 (ja) * | 2015-09-10 | 2019-09-04 | 千代田化工建設株式会社 | 建設資材管理システムおよび建設資材管理方法 |
| WO2017053407A1 (en) | 2015-09-24 | 2017-03-30 | Quovard Management Llc | Systems and methods for localization using surface imaging |
| US20180283895A1 (en) * | 2015-09-24 | 2018-10-04 | Apple Inc. | Navigation system and method |
| US10832426B2 (en) | 2015-09-24 | 2020-11-10 | Apple Inc. | Systems and methods for surface monitoring |
| US9682481B2 (en) * | 2015-10-26 | 2017-06-20 | X Development Llc | Communication of information regarding a robot using an optical identifier |
| CN108700876B (zh) * | 2015-11-04 | 2021-08-27 | 祖克斯有限公司 | 用于自主车辆轨迹修改的远程操作系统和方法 |
| US10264431B2 (en) * | 2016-02-01 | 2019-04-16 | Caterpillar Inc. | Work site perception system |
| US10662045B2 (en) * | 2016-02-11 | 2020-05-26 | Clearpath Robotics Inc. | Control augmentation apparatus and method for automated guided vehicles |
| EP3453008A1 (en) | 2016-05-06 | 2019-03-13 | PCMS Holdings, Inc. | Method and system for collaborative sensing for updating dynamic map layers |
| CN114627664B (zh) * | 2016-08-26 | 2025-09-30 | 松下电器(美国)知识产权公司 | 三维信息处理方法以及三维信息处理装置 |
| KR102567525B1 (ko) * | 2016-11-17 | 2023-08-16 | 삼성전자주식회사 | 이동 로봇 시스템, 이동 로봇 및 이동 로봇 시스템의 제어 방법 |
| CN106802654A (zh) * | 2016-11-25 | 2017-06-06 | 斑马信息科技有限公司 | 移车系统和移车方法 |
| US11194334B2 (en) * | 2016-11-30 | 2021-12-07 | Panasonic Intellectual Property Corporation Of America | Autonomous mobile device, autonomous delivery system, delivery method, and non-transitory recording medium |
| KR101955630B1 (ko) * | 2016-12-08 | 2019-03-07 | 삼성중공업(주) | 자재 위치 관리 장치 및 자재 위치 관리 방법 |
| KR101959814B1 (ko) * | 2016-12-16 | 2019-03-21 | 네이버 주식회사 | 발달 장애인을 위한 탑승형 실내 자율 주행 로봇을 활용한 물류 시스템 및 물류 운반 방법, 탑승형 실내 자율 주행 로봇 |
| US10866102B2 (en) * | 2016-12-23 | 2020-12-15 | X Development Llc | Localization of robotic vehicles |
| US10509748B2 (en) | 2016-12-30 | 2019-12-17 | Intel Corporation | Memory sharing for application offload from host processor to integrated sensor hub |
| CN107063275B (zh) * | 2017-03-24 | 2020-05-12 | 重庆邮电大学 | 基于路侧设备的智能车辆地图融合系统及方法 |
| CA3058420C (en) * | 2017-03-30 | 2023-10-10 | Crown Equipment Corporation | Warehouse mapping tools |
| MX2019012059A (es) | 2017-04-07 | 2020-07-20 | Bxb Digital Pty Ltd | Sistemas y métodos para el seguimiento de promociones. |
| DE102017206130A1 (de) * | 2017-04-10 | 2018-10-11 | Robert Bosch Gmbh | Verfahren und Vorrichtung zum Erstellen und Bereitstellen einer ersten Karte |
| US10761541B2 (en) * | 2017-04-21 | 2020-09-01 | X Development Llc | Localization with negative mapping |
| US10479354B2 (en) | 2017-05-02 | 2019-11-19 | Cnh Industrial America Llc | Obstacle detection system for a work vehicle |
| WO2018204507A1 (en) | 2017-05-02 | 2018-11-08 | BXB Digital Pty Limited | Systems and methods for facility matching and localization |
| US10824904B2 (en) | 2017-05-02 | 2020-11-03 | BXB Digital Pty Limited | Systems and methods for pallet identification |
| WO2018204912A1 (en) | 2017-05-05 | 2018-11-08 | BXB Digital Pty Limited | Pallet with tracking device |
| US11493930B2 (en) | 2018-09-28 | 2022-11-08 | Intrinsic Innovation Llc | Determining changes in marker setups for robot localization |
| US10823574B2 (en) * | 2017-06-01 | 2020-11-03 | Panasonic Intellectual Property Corporation Of America | Communication method, roadside unit, and communication system |
| IT201700076968A1 (it) * | 2017-07-07 | 2019-01-07 | Prefab S R L | Metodo per la movimentazione delle merci |
| CA3073606A1 (en) | 2017-08-21 | 2019-02-28 | BXB Digital Pty Limited | Systems and methods for pallet tracking using hub and spoke architecture |
| MA50387A (fr) | 2017-10-20 | 2020-08-26 | Bxb Digital Pty Ltd | Systèmes et procédés de suivi de transporteurs de marchandises |
| US11352071B1 (en) * | 2018-10-21 | 2022-06-07 | AI Incorporated | Autonomous versatile vehicle system |
| US11091211B1 (en) * | 2017-12-22 | 2021-08-17 | AI Incorporated | Autonomous versatile vehicle system |
| US11815894B1 (en) * | 2017-12-22 | 2023-11-14 | AI Incorporated | Autonomous versatile vehicle system |
| FR3076898B1 (fr) * | 2018-01-16 | 2021-01-01 | Balyo | Procede et dispositif de cartographie pour vehicule automatique |
| US10754343B2 (en) * | 2018-02-15 | 2020-08-25 | X Development Llc | Semantic mapping of environments for autonomous devices |
| US10529089B2 (en) * | 2018-02-23 | 2020-01-07 | GM Global Technology Operations LLC | Crowd-sensed point cloud map |
| DE102018207857A1 (de) * | 2018-05-18 | 2019-11-21 | Zf Friedrichshafen Ag | Verfahren und Positionierungssystem zum Transformieren einer Position eines Fahrzeugs |
| DE102018209603A1 (de) * | 2018-06-14 | 2019-12-19 | Robert Bosch Gmbh | Verfahren und Vorrichtung zur Steuerung selbstfahrender Fahrzeuge |
| US11227486B2 (en) * | 2018-07-16 | 2022-01-18 | Here Global B.V. | Method, apparatus, and system for estimating vulnerable road users |
| EP3824365B1 (en) | 2018-07-17 | 2023-06-28 | Crown Equipment Corporation | System for vehicle position calibration using rack leg identification |
| US11068515B2 (en) | 2018-07-24 | 2021-07-20 | Google Llc | Map uncertainty and observation modeling |
| US20200050205A1 (en) * | 2018-08-07 | 2020-02-13 | Cnh Industrial America Llc | System and method for updating a mapped area |
| DE102018215560A1 (de) * | 2018-08-28 | 2020-03-05 | Robert Bosch Gmbh | Verfahren zum Koordinieren und Überwachen von Objekten |
| US11305936B2 (en) * | 2018-09-28 | 2022-04-19 | Autoguide, LLC | Commercial logistic facility, configurable modular robotic autonomous guided vehicle, and method therefor |
| US10852740B2 (en) | 2018-09-28 | 2020-12-01 | X Development Llc | Determining the orientation of flat reflectors during robot mapping |
| US10824160B2 (en) | 2018-09-28 | 2020-11-03 | X Development Llc | Robot localization with co-located markers |
| US11017674B1 (en) * | 2018-10-15 | 2021-05-25 | Waymo Llc | Managing and tracking scouting tasks using autonomous vehicles |
| EP3867757A4 (en) * | 2018-10-16 | 2022-09-14 | Brain Corporation | Systems and methods for persistent mapping of environmental parameters using a centralized cloud server and a robotic network |
| US20220041184A1 (en) * | 2018-10-18 | 2022-02-10 | Caratica Ai Ltd. | Method and system for obstacle detection |
| DE112018008077T5 (de) * | 2018-10-19 | 2021-09-23 | Harman Becker Automotive Systems Gmbh | Globale Kartenerstellung unter Verwendung lokaler bordeigener Karten, die durch Flottenbewegungsbahnen und -beobachtungen erstellt wurden |
| CN109282821B (zh) * | 2018-11-28 | 2019-12-03 | 浙江明度智控科技有限公司 | 一种园区导航方法和系统 |
| US10816637B2 (en) | 2018-12-27 | 2020-10-27 | Chep Technology Pty Limited | Site matching for asset tracking |
| US20200209870A1 (en) * | 2018-12-28 | 2020-07-02 | Continental Automotive Systems, Inc. | Collection and distribution of environmental information in limited access areas |
| US11798293B2 (en) * | 2018-12-28 | 2023-10-24 | Sony Group Corporation | Optical vehicle positioning |
| US12326733B2 (en) | 2019-02-06 | 2025-06-10 | Crown Equipment Corporation | Systems and methods for out of aisle localization and vehicle position calibration using rack leg identification |
| KR20250068774A (ko) | 2019-02-06 | 2025-05-16 | 크라운 이큅먼트 코포레이션 | 랙 다리 식별 및 마스트 흔들림 보상을 사용한 차량 위치 교정을 위한 시스템 및 방법 |
| MX391596B (es) | 2019-02-25 | 2025-03-21 | Bxb Digital Pty Ltd | Cierre físico inteligente en la cadena de suministro. |
| CN110207710B (zh) * | 2019-06-26 | 2021-03-16 | 北京小狗智能机器人技术有限公司 | 机器人重定位方法及装置 |
| US11206677B2 (en) | 2019-08-14 | 2021-12-21 | Toyota Motor North America, Inc. | Sharing vehicle map data over transmission media selected according to urgency of the map data |
| DE102019214115A1 (de) * | 2019-09-17 | 2021-03-18 | Robert Bosch Gmbh | Verfahren zur Verteilung von Navigationskartendaten an eine Mehrzahl von Arbeitsmaschinen |
| AU2020257165B2 (en) | 2019-10-28 | 2025-07-10 | The Raymond Corporation | Systems and methods for transferring routes between material handling devices |
| JP7294162B2 (ja) * | 2020-01-22 | 2023-06-20 | 株式会社豊田自動織機 | 無人フォークリフト |
| US11977392B2 (en) * | 2020-05-11 | 2024-05-07 | Mobile Industrial Robots Inc. | Identifying elements in an environment |
| US20210347617A1 (en) * | 2020-05-11 | 2021-11-11 | Autoguide, LLC. | Engaging an element |
| KR102409528B1 (ko) * | 2020-11-18 | 2022-06-20 | (주)엠텍 | 무인 팔레트트럭 자율주행시스템 |
| SE546978C2 (en) * | 2020-12-01 | 2025-03-25 | Toyota Mat Handling Manufacturing Sweden Ab | Warehouse system and material handling vehicle |
| EP4239548A1 (en) * | 2022-03-04 | 2023-09-06 | Hyster-Yale Group, Inc. | Portable survey unit and method |
| KR102491670B1 (ko) * | 2022-09-01 | 2023-01-27 | 엘케이시스(주) | 자율주행용 지도 생성장치 |
| CN115638783A (zh) * | 2022-09-13 | 2023-01-24 | 奥比中光科技集团股份有限公司 | 一种地图在线更新方法、装置、存储介质及终端设备 |
| US20240144174A1 (en) * | 2022-10-26 | 2024-05-02 | Dell Products L.P. | Far-edge intensive processing for so-maps |
| US12372374B2 (en) | 2022-10-27 | 2025-07-29 | Dell Products L.P. | Orchestration of action-input representations for decision making in edge environments |
| US20240160213A1 (en) * | 2022-11-15 | 2024-05-16 | Canon Kabushiki Kaisha | Map data generation device, storage medium, and map data generation method |
| US20240248473A1 (en) * | 2023-01-25 | 2024-07-25 | Dell Products L.P. | Service module for warehouse traffic planning assistance |
| IT202300007002A1 (it) * | 2023-04-12 | 2024-10-12 | Roboptica S R L | Sistema di localizzazione per veicoli industriali |
| DE102024122373A1 (de) | 2023-09-13 | 2025-03-13 | Sew-Eurodrive Gmbh & Co Kg | Verfahren zum Betrieb einer technischen Anlage und technische Anlage |
| US12553739B1 (en) * | 2023-11-15 | 2026-02-17 | Zoox, Inc. | Systems and methods for generating map data |
| US12606427B1 (en) * | 2025-11-28 | 2026-04-21 | Visionnav Robotics Usa Inc. | Method for determining center of material handling equipment, material handling equipment and controller |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009012923A (ja) * | 2007-07-04 | 2009-01-22 | Hitachi Ltd | 移動装置、システム、移動方法及び移動プログラム |
| US20090216438A1 (en) * | 2008-02-21 | 2009-08-27 | Microsoft Corporation | Facility map framework |
Family Cites Families (80)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6067818A (ja) | 1983-09-22 | 1985-04-18 | Hitachi Ltd | 車載用ナビゲ−タ |
| US4855915A (en) | 1987-03-13 | 1989-08-08 | Dallaire Rodney J | Autoguided vehicle using reflective materials |
| US4858132A (en) | 1987-09-11 | 1989-08-15 | Ndc Technologies, Inc. | Optical navigation system for an automatic guided vehicle, and method |
| US5011358A (en) | 1988-10-25 | 1991-04-30 | Andersen Eric T | Height indicator for a fork lift truck |
| US5179329A (en) | 1989-04-25 | 1993-01-12 | Shinko Electric Co., Ltd. | Travel control method, travel control device, and mobile robot for mobile robot systems |
| US5051906A (en) | 1989-06-07 | 1991-09-24 | Transitions Research Corporation | Mobile robot navigation employing retroreflective ceiling features |
| US5646843A (en) | 1990-02-05 | 1997-07-08 | Caterpillar Inc. | Apparatus and method for surface based vehicle control system |
| US5170352A (en) | 1990-05-07 | 1992-12-08 | Fmc Corporation | Multi-purpose autonomous vehicle with path plotting |
| US5202832A (en) | 1991-01-29 | 1993-04-13 | R. R. Donnelley & Sons Co. | Material handling automation system using portable transfer module |
| US5491670A (en) | 1993-01-21 | 1996-02-13 | Weber; T. Jerome | System and method for sonic positioning |
| US5539638A (en) | 1993-08-05 | 1996-07-23 | Pavilion Technologies, Inc. | Virtual emissions monitor for automobile |
| US5471393A (en) | 1994-01-26 | 1995-11-28 | Bolger; Joe | Driver's associate: a system for vehicle navigation and driving assistance |
| US5961571A (en) | 1994-12-27 | 1999-10-05 | Siemens Corporated Research, Inc | Method and apparatus for automatically tracking the location of vehicles |
| US5916285A (en) | 1995-10-18 | 1999-06-29 | Jervis B. Webb Company | Method and apparatus for sensing forward, reverse and lateral motion of a driverless vehicle |
| DE19613386A1 (de) | 1996-04-03 | 1997-10-09 | Fiat Om Carrelli Elevatori | Flurförderzeug, das wahlweise manuell oder automatisch betreibbar ausgebildet ist |
| SE9601440D0 (sv) | 1996-04-15 | 1996-04-15 | Apogeum Ab | Förfarande för positionsbestämning av ett flertal fasta objekt |
| US6092010A (en) | 1997-09-03 | 2000-07-18 | Jervis B. Webb Company | Method and system for describing, generating and checking non-wire guidepaths for automatic guided vehicles |
| SE511504C2 (sv) | 1997-10-17 | 1999-10-11 | Apogeum Ab | Sätt och anordning för associering av anonyma reflektorer till detekterade vinkellägen |
| DE19757333C1 (de) | 1997-12-22 | 1999-09-16 | Litef Gmbh | Selbsttätige, schnelle Kalibrierung einer bordautonomen Messung eines Geschwindigkeitsvektors |
| JPH11296229A (ja) | 1998-02-13 | 1999-10-29 | Komatsu Ltd | 車両の誘導装置 |
| US6073076A (en) * | 1998-03-27 | 2000-06-06 | Navigation Technologies Corporation | Memory management for navigation system |
| JP3316841B2 (ja) | 1998-08-06 | 2002-08-19 | 村田機械株式会社 | 無人搬送車システム |
| JP3316842B2 (ja) | 1998-08-06 | 2002-08-19 | 村田機械株式会社 | 無人搬送車システムと無人搬送車の誘導方法 |
| JP3918326B2 (ja) * | 1998-10-26 | 2007-05-23 | 株式会社デンソー | 経路設定装置及びナビゲーション装置 |
| US7123166B1 (en) | 2000-11-17 | 2006-10-17 | Haynes Michael N | Method for managing a parking lot |
| JP2002048579A (ja) | 2000-04-28 | 2002-02-15 | Matsushita Electric Ind Co Ltd | 通信型ナビゲーションシステム |
| US6917839B2 (en) | 2000-06-09 | 2005-07-12 | Intellectual Assets Llc | Surveillance system and method having an operating mode partitioned fault classification model |
| JP2002108446A (ja) | 2000-09-29 | 2002-04-10 | Nippon Seiki Co Ltd | 移動体の誘導方法 |
| US6428439B1 (en) | 2000-10-04 | 2002-08-06 | Gkn Automotive, Inc. | Integrated viscous transmission in a differential |
| US6952488B2 (en) | 2001-08-27 | 2005-10-04 | Carnegie Mellon University | System and method for object localization |
| RU2212113C2 (ru) * | 2001-09-07 | 2003-09-10 | Марат Саитович Тугушев | Способ автоматической информационной связи с использованием кодированной карточки и кодированная карточка для его осуществления |
| JP3968501B2 (ja) | 2001-11-30 | 2007-08-29 | ソニー株式会社 | ロボットの自己位置同定システム及び自己位置同定方法 |
| US7844364B2 (en) | 2002-04-16 | 2010-11-30 | Irobot Corporation | Systems and methods for dispersing and clustering a plurality of robotic devices |
| EP1502078A1 (en) | 2002-04-30 | 2005-02-02 | Telmap Ltd. | Template-based map distribution system |
| DE10220936A1 (de) | 2002-05-10 | 2003-12-04 | Siemens Ag | Vorrichtung zur Lokalisierung mit festen und/oder veränderlichen Landmarken |
| US20050149256A1 (en) | 2002-05-10 | 2005-07-07 | Siemens Aktiengesellschaft | Device for determining the position by means of fixed and/or variable landmarks |
| DE10230479A1 (de) * | 2002-07-06 | 2004-01-15 | Robert Bosch Gmbh | Fahrerinformationsvorrichtung |
| GB2389947B (en) | 2002-07-25 | 2004-06-02 | Golden River Traffic Ltd | Automatic validation of sensing devices |
| DE10234730A1 (de) | 2002-07-30 | 2004-02-19 | Josef Schreiner | Verfahren zur Positionsbestimmung eines Transportfahrzeuges |
| US7145478B2 (en) | 2002-12-17 | 2006-12-05 | Evolution Robotics, Inc. | Systems and methods for controlling a density of visual landmarks in a visual simultaneous localization and mapping system |
| KR100506533B1 (ko) | 2003-01-11 | 2005-08-05 | 삼성전자주식회사 | 이동로봇 및 그에 따른 자율주행 시스템 및 방법 |
| WO2005050849A2 (en) | 2003-10-01 | 2005-06-02 | Laird Mark D | Wireless virtual campus escort system |
| JP4409904B2 (ja) | 2003-10-08 | 2010-02-03 | 株式会社日立製作所 | 経路情報提供システムおよび経路情報提供方法 |
| KR100982058B1 (ko) * | 2003-10-20 | 2010-09-13 | 엘지전자 주식회사 | 이동체의 지도 데이터 관리 방법 |
| US7689321B2 (en) | 2004-02-13 | 2010-03-30 | Evolution Robotics, Inc. | Robust sensor fusion for mapping and localization in a simultaneous localization and mapping (SLAM) system |
| WO2005086375A1 (ja) | 2004-03-03 | 2005-09-15 | Nec Corporation | 測位システム、即位方法、及びそのプログラム |
| KR100571837B1 (ko) | 2004-03-05 | 2006-04-17 | 삼성전자주식회사 | 자율주행기기의 주행제어방법 및 장치 |
| US7246007B2 (en) * | 2004-03-24 | 2007-07-17 | General Motors Corporation | System and method of communicating traffic information |
| DE112005000738T5 (de) | 2004-03-29 | 2007-04-26 | Evolution Robotics, Inc., Pasadena | Verfahren und Vorrichtung zur Positionsbestimmung unter Verwendung von reflektierten Lichtquellen |
| US7148458B2 (en) | 2004-03-29 | 2006-12-12 | Evolution Robotics, Inc. | Circuit for estimating position and orientation of a mobile object |
| KR100703692B1 (ko) | 2004-11-03 | 2007-04-05 | 삼성전자주식회사 | 공간상에 존재하는 오브젝트들을 구별하기 위한 시스템,장치 및 방법 |
| US20100222925A1 (en) | 2004-12-03 | 2010-09-02 | Takashi Anezaki | Robot control apparatus |
| US7845560B2 (en) | 2004-12-14 | 2010-12-07 | Sky-Trax Incorporated | Method and apparatus for determining position and rotational orientation of an object |
| US8497761B2 (en) | 2005-01-13 | 2013-07-30 | Rite-Hite Holding Corporation | System and method for remotely controlling docking station components |
| US8930023B2 (en) | 2009-11-06 | 2015-01-06 | Irobot Corporation | Localization by learning of wave-signal distributions |
| EP2806326B1 (en) * | 2005-09-02 | 2016-06-29 | Neato Robotics, Inc. | Multi-function robotic device |
| GB0520576D0 (en) | 2005-10-10 | 2005-11-16 | Applied Generics Ltd | Using traffic monitoring information to provide better driver route planning |
| AU2006306523B2 (en) | 2005-10-21 | 2011-05-19 | Deere & Company | Systems and methods for switching between autonomous and manual operation of a vehicle |
| US8381982B2 (en) | 2005-12-03 | 2013-02-26 | Sky-Trax, Inc. | Method and apparatus for managing and controlling manned and automated utility vehicles |
| US7634336B2 (en) | 2005-12-08 | 2009-12-15 | Electronics And Telecommunications Research Institute | Localization system and method of mobile robot based on camera and landmarks |
| US7616642B2 (en) | 2006-01-04 | 2009-11-10 | Sap Ag | Priority assignment and transmission of sensor data |
| US8050863B2 (en) | 2006-03-16 | 2011-11-01 | Gray & Company, Inc. | Navigation and control system for autonomous vehicles |
| US7646336B2 (en) | 2006-03-24 | 2010-01-12 | Containertrac, Inc. | Automated asset positioning for location and inventory tracking using multiple positioning techniques |
| JP4763537B2 (ja) * | 2006-07-13 | 2011-08-31 | 株式会社デンソー | 運転支援情報報知装置 |
| US20100023257A1 (en) * | 2006-12-11 | 2010-01-28 | Mitsubishi Electric Corporation | Navigation apparatus |
| CN101246476A (zh) * | 2007-02-15 | 2008-08-20 | 北京腾瑞万里信息技术有限公司 | 地图数据的下载方法及下载装置和服务器 |
| JP4975503B2 (ja) | 2007-04-06 | 2012-07-11 | 本田技研工業株式会社 | 脚式移動ロボット |
| JP4328813B2 (ja) | 2007-04-06 | 2009-09-09 | 本田技研工業株式会社 | 移動装置、ならびにその制御方法および制御プログラム |
| DE102007021693A1 (de) | 2007-05-09 | 2008-11-13 | Götting jun., Hans-Heinrich, Dipl.-Ing. (FH) | Hilfssystem zur Lagebestimmung eines Fahrzeugs |
| WO2009007983A2 (en) | 2007-07-12 | 2009-01-15 | Carmel - Haifa University Economic Corp Ltd. | Localization method for mobile robots based on landmarks |
| US20090140887A1 (en) | 2007-11-29 | 2009-06-04 | Breed David S | Mapping Techniques Using Probe Vehicles |
| US8126642B2 (en) | 2008-10-24 | 2012-02-28 | Gray & Company, Inc. | Control and systems for autonomously driven vehicles |
| JP4655139B2 (ja) | 2008-11-19 | 2011-03-23 | トヨタ自動車株式会社 | 移動体位置測位装置 |
| KR101214143B1 (ko) | 2008-12-22 | 2012-12-20 | 한국전자통신연구원 | 이동체의 위치 및 방향 인식 장치 및 그 방법 |
| JP5062364B2 (ja) | 2009-11-27 | 2012-10-31 | トヨタ自動車株式会社 | 自律移動体及びその制御方法 |
| US20110153338A1 (en) | 2009-12-17 | 2011-06-23 | Noel Wayne Anderson | System and method for deploying portable landmarks |
| US8340438B2 (en) | 2009-12-17 | 2012-12-25 | Deere & Company | Automated tagging for landmark identification |
| US20120101784A1 (en) | 2010-10-25 | 2012-04-26 | Trimble Navigation Limited | Wide-area agricultural monitoring and prediction |
| US20120191272A1 (en) * | 2011-01-24 | 2012-07-26 | Sky-Trax, Inc. | Inferential load tracking |
| US8594923B2 (en) | 2011-06-14 | 2013-11-26 | Crown Equipment Limited | Method and apparatus for sharing map data associated with automated industrial vehicles |
-
2011
- 2011-06-14 US US13/159,500 patent/US8594923B2/en not_active Expired - Fee Related
-
2012
- 2012-06-08 AU AU2012269800A patent/AU2012269800B2/en not_active Ceased
- 2012-06-08 BR BR112013030722-6A patent/BR112013030722A2/pt not_active Application Discontinuation
- 2012-06-08 KR KR1020157032348A patent/KR101663977B1/ko not_active Expired - Fee Related
- 2012-06-08 WO PCT/NZ2012/000092 patent/WO2012173497A1/en not_active Ceased
- 2012-06-08 CN CN201280027291.2A patent/CN103582803B/zh active Active
- 2012-06-08 EP EP12743787.9A patent/EP2721374B1/en not_active Not-in-force
- 2012-06-08 KR KR1020137033174A patent/KR101589943B1/ko not_active Expired - Fee Related
- 2012-06-08 CA CA2834932A patent/CA2834932C/en active Active
- 2012-06-08 RU RU2013154046/28A patent/RU2587641C2/ru not_active IP Right Cessation
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009012923A (ja) * | 2007-07-04 | 2009-01-22 | Hitachi Ltd | 移動装置、システム、移動方法及び移動プログラム |
| US20090216438A1 (en) * | 2008-02-21 | 2009-08-27 | Microsoft Corporation | Facility map framework |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20190003808A (ko) * | 2016-05-23 | 2019-01-09 | 크라운 이큅먼트 코포레이션 | 창고 환경에서의 자재 핸들링 차량의 사용을 위한 시스템들 및 방법들 |
| KR20190004356A (ko) * | 2016-05-23 | 2019-01-11 | 크라운 이큅먼트 코포레이션 | 창고 환경에서의 자재 핸들링 차량의 사용을 위한 시스템들 및 방법들 |
| KR20190122270A (ko) * | 2016-05-23 | 2019-10-29 | 크라운 이큅먼트 코포레이션 | 창고 환경에서의 자재 핸들링 차량의 사용을 위한 시스템들 및 방법들 |
| KR20210038538A (ko) * | 2018-08-01 | 2021-04-07 | 크라운 이큅먼트 코포레이션 | 창고 환경 속도 구역 관리를 위한 시스템 및 방법 |
| KR20250028523A (ko) * | 2018-08-01 | 2025-02-28 | 크라운 이큅먼트 코포레이션 | 창고 환경 속도 구역 관리를 위한 시스템 및 방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| RU2587641C2 (ru) | 2016-06-20 |
| CA2834932C (en) | 2014-08-12 |
| EP2721374B1 (en) | 2016-08-10 |
| RU2013154046A (ru) | 2015-07-20 |
| CA2834932A1 (en) | 2012-12-20 |
| KR101663977B1 (ko) | 2016-10-12 |
| US8594923B2 (en) | 2013-11-26 |
| WO2012173497A1 (en) | 2012-12-20 |
| KR20140020331A (ko) | 2014-02-18 |
| BR112013030722A2 (pt) | 2020-08-04 |
| AU2012269800A1 (en) | 2013-05-02 |
| EP2721374A1 (en) | 2014-04-23 |
| CN103582803A (zh) | 2014-02-12 |
| CN103582803B (zh) | 2017-04-19 |
| KR101589943B1 (ko) | 2016-02-12 |
| US20120323431A1 (en) | 2012-12-20 |
| AU2012269800B2 (en) | 2014-05-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101663977B1 (ko) | 자동화된 산업 차량들과 연관된 맵 데이터를 공유하기 위한 방법 및 장치 | |
| EP2721373B1 (en) | Method for facilitating map data processing for industrial vehicle navigation | |
| US9056754B2 (en) | Method and apparatus for using pre-positioned objects to localize an industrial vehicle | |
| CA2845935C (en) | Method and apparatus for using pre-positioned objects to localize an industrial vehicle | |
| EP2863284B1 (en) | Method and apparatus for using unique landmarks to locate industrial vehicles at start-up | |
| US9580285B2 (en) | Method and apparatus for using unique landmarks to locate industrial vehicles at start-up | |
| US20120303255A1 (en) | Method and apparatus for providing accurate localization for an industrial vehicle |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A107 | Divisional application of patent | ||
| A201 | Request for examination | ||
| PA0104 | Divisional application for international application |
St.27 status event code: A-0-1-A10-A16-div-PA0104 St.27 status event code: A-0-1-A10-A18-div-PA0104 |
|
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| N231 | Notification of change of applicant | ||
| PN2301 | Change of applicant |
St.27 status event code: A-3-3-R10-R11-asn-PN2301 St.27 status event code: A-3-3-R10-R13-asn-PN2301 |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
Fee payment year number: 1 St.27 status event code: A-2-2-U10-U12-oth-PR1002 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |
|
| FPAY | Annual fee payment |
Payment date: 20190924 Year of fee payment: 4 |
|
| PR1001 | Payment of annual fee |
Fee payment year number: 4 St.27 status event code: A-4-4-U10-U11-oth-PR1001 |
|
| PC1903 | Unpaid annual fee |
Not in force date: 20201005 Payment event data comment text: Termination Category : DEFAULT_OF_REGISTRATION_FEE St.27 status event code: A-4-4-U10-U13-oth-PC1903 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |
|
| PC1903 | Unpaid annual fee |
Ip right cessation event data comment text: Termination Category : DEFAULT_OF_REGISTRATION_FEE Not in force date: 20201005 St.27 status event code: N-4-6-H10-H13-oth-PC1903 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |