KR20160128124A - 이동 로봇 및 그 제어방법 - Google Patents
이동 로봇 및 그 제어방법 Download PDFInfo
- Publication number
- KR20160128124A KR20160128124A KR1020150059971A KR20150059971A KR20160128124A KR 20160128124 A KR20160128124 A KR 20160128124A KR 1020150059971 A KR1020150059971 A KR 1020150059971A KR 20150059971 A KR20150059971 A KR 20150059971A KR 20160128124 A KR20160128124 A KR 20160128124A
- Authority
- KR
- South Korea
- Prior art keywords
- robot
- information related
- coordinate information
- main body
- information
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images






















Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0212—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory
- G05D1/0219—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory ensuring the processing of the whole working surface
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01D—HARVESTING; MOWING
- A01D34/00—Mowers; Mowing apparatus of harvesters
- A01D34/835—Mowers; Mowing apparatus of harvesters specially adapted for particular purposes
- A01D34/84—Mowers; Mowing apparatus of harvesters specially adapted for particular purposes for edges of lawns or fields, e.g. for mowing close to trees or walls
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1656—Program controls characterised by programming, planning systems for manipulators
- B25J9/1664—Program controls characterised by programming, planning systems for manipulators characterised by motion, path, trajectory planning
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0268—Control of position or course in two dimensions specially adapted to land vehicles using internal positioning means
- G05D1/0274—Control of position or course in two dimensions specially adapted to land vehicles using internal positioning means using mapping information stored in a memory device
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- General Physics & Mathematics (AREA)
- Aviation & Aerospace Engineering (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Environmental Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
- Manipulator (AREA)
Abstract
Description
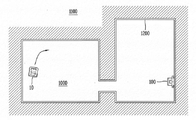
도 1c 및 1d는 이동 로봇의 일 실시예를 나타낸 개념도이다.
도 1e는 본 발명과 관련된 이동 로봇을 설명하기 위한 블록도이다.
도 2는 본 발명에 따른 이동 로봇의 제어방법의 일 실시예를 나타낸 흐름도이다.
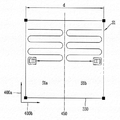
도 3a는 본 발명에 따른 이동 로봇의 작업영역과 관련된 맵 정보를 생성하는 방법의 일 실시예를 나타낸 흐름도이다.
도 3b 내지 도 3e는 도 3a에 도시된 일 실시예를 나타내는 개념도이다.
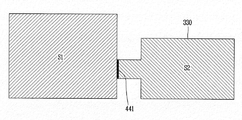
도 4a는 본 발명에 따른 이동 로봇의 작업영역을 복수의 영역으로 분할하는 방법의 일 실시예를 나타낸 흐름도이다.
도 4b 내지 도 4g는 도 4a에 도시된 일 실시예를 나타내는 개념도이다.
도 5a는 본 발명에 따른 이동 로봇을 작업영역의 특정 지점으로 복귀시키는 방법과 관련된 일 실시예를 나타낸 흐름도이다.
도 5b 내지 도 5d는 도 5a에 도시된 일 실시예를 나타내는 개념도이다.
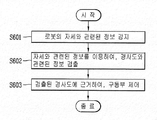
도 6a는 본 발명에 따른 이동 로봇의 작업영역의 경사도에 대한 주행 제어 방법의 일 실시예를 나타낸 흐름도이다.
도 6b 및 도 6c는 도 6a에 도시된 일 실시예를 나타내는 개념도이다.
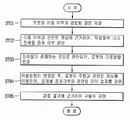
도 7a는 본 발명에 따른 이동 로봇의 작업영역 내에 장애물 존재 여부를 판단하는 방법의 일 실시예를 나타낸 흐름도이다.
도 7b는 도 7a에 도시된 일 실시예를 나타내는 개념도이다.
Claims (12)
- 잔디 깎기 로봇에 있어서,
본체;
상기 본체가 폐루프를 형성하는 와이어의 내측에서 이동하도록 구동되는 구동부;
상기 폐루프와 관련된 좌표 정보를 포함하는 맵 정보를 저장하는 메모리;
상기 본체의 현재 위치와 관련된 좌표정보를 감지하는 센싱부; 및
상기 잔디 깎기 로봇에서 복귀 이벤트의 발생 여부를 판단하고,
상기 복귀 이벤트가 발생하면, 상기 저장된 맵 정보 및 상기 현재 위치와 관련된 좌표정보 중 적어도 하나를 이용하여,
상기 본체가 상기 와이어를 따라 트래킹(tracking)하여, 상기 폐루프와 관련된 좌표 정보 중 기 설정된 기준 좌표정보에 대응되는 위치로 이동하도록 상기 구동부를 제어하는 제어부를 포함하는 것을 특징으로 하는 잔디 깎기 로봇. - 제1항에 있어서,
상기 잔디 깎기 로봇에 전원을 공급하는 배터리를 더 포함하고,
상기 제어부는,
상기 배터리의 잔량이 소정의 기준 값 이하이면, 상기 복귀 이벤트가 발생된 것으로 판단하고,
상기 기준 좌표정보는 상기 잔디 깎기 로봇의 충전 장치가 설치된 위치와 관련된 정보에 대응되는 것을 특징으로 하는 잔디 깎기 로봇. - 제1항에 있어서,
무선 통신을 수행하는 통신부를 더 포함하고,
상기 제어부는,
상기 통신부가 소환 명령과 관련된 신호를 수신하면, 상기 복귀 이벤트가 발생된 것으로 판단하는 것을 특징으로 하는 잔디 깎기 로봇. - 제1항에 있어서,
상기 센싱부는 상기 잔디 깎기 로봇의 고장과 관련된 정보를 감지하고,
상기 제어부는,
상기 센싱부에서 감지된 고장과 관련된 정보를 이용하여, 상기 잔디 깎기 로봇의 고장 여부를 판별하고,
상기 잔디 깎기 로봇에서 고장이 발생된 것으로 판별되면, 상기 복귀 이벤트가 발생된 것으로 판단하는 것을 특징으로 하는 잔디 깎기 로봇. - 제1항에 있어서,
상기 제어부는,
상기 와이어를 따르는 제1 방향의 주행 경로와 관련된 정보를 검출하고,
상기 제1 방향과 다른 제2 방향의 주행 경로와 관련된 정보를 검출하고,
상기 검출된 정보를 비교하여, 상기 본체의 이동 경로와 관련된 정보를 설정하고,
상기 설정된 이동 경로와 관련된 정보를 이용하여, 상기 구동부를 제어하는 것을 특징으로 하는 잔디 깎기 로봇. - 제5항에 있어서,
상기 제어부는,
상기 본체가 상기 기준 좌표정보에 대응되는 위치까지 이동하는데 소요되는 시간 및 전력 중 적어도 하나를 최소화하도록, 상기 본체의 이동 경로와 관련된 정보를 설정하는 것을 특징으로 하는 잔디 깎기 로봇. - 제1항에 있어서,
상기 제어부는,
상기 본체가 상기 와이어를 따라 트래킹하는 동안, 상기 센싱부로부터 감지되는 좌표 정보를 이용하여, 상기 저장된 맵 정보를 보정하는 것을 특징으로 하는 잔디 깎기 로봇. - 제7항에 있어서,
상기 제어부는,
상기 현재 위치로부터, 상기 기준 좌표정보에 대응되는 위치까지 상기 본체가 상기 와이어를 따라 트래킹하는 동안 소정의 시간 간격마다 좌표정보를 감지하도록 상기 센싱부를 제어하고,
상기 기준 좌표정보에 대응되는 위치에 상기 본체가 도착하면, 상기 기준 좌표정보와 상기 센싱부에서 감지된 좌표정보의 차이를 검출하고,
상기 검출된 차이를 이용하여, 상기 저장된 맵 정보를 보정하는 것을 특징으로 하는 잔디 깎기 로봇. - 제1항에 있어서,
상기 메모리는 상기 맵 정보에 대한 좌표축과 관련된 정보를 저장하고,
상기 제어부는,
상기 복귀 이벤트가 발생된 시점에서의 상기 본체의 위치와 관련된 좌표정보 및 상기 좌표축과 관련된 정보 중 적어도 하나를 이용하여, 상기 와이어 중 어느 한 지점과 관련된 좌표정보를 상기 잔디 깎기 로봇의 재시작 지점과 관련된 좌표정보로 설정하고,
상기 잔디 깎기 로봇에서 재시작 이벤트가 발생된 것으로 판단되면, 상기 설정된 재시작 지점과 관련된 좌표정보에 대응하는 위치로, 상기 본체가 이동하도록 상기 구동부를 제어하는 것을 특징으로 하는 잔디 깎기 로봇. - 제9항에 있어서,
상기 제어부는,
상기 복귀 이벤트가 발생된 시점에서의 상기 본체의 위치에서, 상기 좌표축 방향으로 가장 근접한 상기 와이어 중 적어도 하나의 지점을 상기 재시작 지점으로 설정하는 것을 특징으로 하는 잔디 깎기 로봇. - 제1항에 있어서,
상기 제어부는,
상기 본체가 트래킹하는 와이어가 상기 잔디 깎기 로봇의 작업영역 내에 위치하는 장애물의 외곽에 설치된 와이어인지 여부를 판단하고,
상기 판단결과에 근거하여, 상기 본체를 상기 작업영역의 윤곽선에 설치된 와이어 중 어느 한 지점으로 이동시키도록 상기 구동부를 제어하는 것을 특징으로 하는 잔디 깎기 로봇. - 잔디 깍기 로봇의 제어방법에 있어서,
폐루프를 형성하는 와이어의 내측에서 상기 잔디 깎기 로봇을 이동시키는 단계;
상기 잔디 깎기 로봇의 현재 위치와 관련된 좌표정보를 감지하는 단계;
상기 잔디 깎기 로봇에 대해 복귀 이벤트의 발생 여부를 판단하는 단계; 및
상기 복귀 이벤트가 발생하면, 메모리에 저장된 맵 정보 및 상기 감지된 현재 위치와 관련된 좌표정보 중 적어도 하나를 이용하여, 상기 잔디 깎기 로봇이 기 설정된 기준 좌표정보에 대응하는 위치로 이동하도록 상기 와이어를 따라 트래킹하는 단계를 포함하는 잔디 깎기 로봇의 제어방법.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020150059971A KR102439184B1 (ko) | 2015-04-28 | 2015-04-28 | 이동 로봇 및 그 제어방법 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020150059971A KR102439184B1 (ko) | 2015-04-28 | 2015-04-28 | 이동 로봇 및 그 제어방법 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20160128124A true KR20160128124A (ko) | 2016-11-07 |
| KR102439184B1 KR102439184B1 (ko) | 2022-09-02 |
Family
ID=57529844
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020150059971A Active KR102439184B1 (ko) | 2015-04-28 | 2015-04-28 | 이동 로봇 및 그 제어방법 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR102439184B1 (ko) |
Cited By (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20190108530A (ko) * | 2019-09-04 | 2019-09-24 | 엘지전자 주식회사 | 이동 로봇 및 그의 구동 방법 |
| WO2019194636A1 (ko) * | 2018-04-06 | 2019-10-10 | 엘지전자 주식회사 | 이동로봇과 이동로봇의 제어방법 |
| WO2020027598A1 (en) * | 2018-08-03 | 2020-02-06 | Lg Electronics Inc. | Moving robot, moving robot system, and method for moving to charging station of moving robot |
| WO2020027610A1 (en) * | 2018-08-03 | 2020-02-06 | Lg Electronics Inc. | Moving robot, system of moving robot and method for moving to charging station of moving robot |
| KR20200018216A (ko) * | 2018-08-03 | 2020-02-19 | 엘지전자 주식회사 | 이동 로봇, 이동 로봇 시스템 및 이동 로봇의 충전대 이동 방법 |
| WO2020122583A1 (en) * | 2018-12-12 | 2020-06-18 | Lg Electronics Inc. | Moving robot system and control method of the same |
| CN112161635A (zh) * | 2020-09-22 | 2021-01-01 | 中山大学 | 一种基于最小回环检测的协同建图方法 |
| US20210096574A1 (en) * | 2018-04-06 | 2021-04-01 | Lg Electronics Inc. | Moving robot and moving robot system |
| WO2021112401A1 (en) * | 2019-12-03 | 2021-06-10 | Samsung Electronics Co., Ltd. | Robot and method for controlling thereof |
| KR20210069547A (ko) * | 2019-12-03 | 2021-06-11 | 삼성전자주식회사 | 로봇 및 그 제어 방법 |
| US20210294348A1 (en) * | 2018-08-08 | 2021-09-23 | Positec Power Tools (Suzhou) Co., Ltd. | Self-moving device, automatic working system, and control method therefor |
| US11178811B2 (en) | 2018-08-03 | 2021-11-23 | Lg Electronics Inc. | Lawn mower robot, system of lawn mower robot and control method of lawn mower robot system |
| US11266067B2 (en) | 2018-08-03 | 2022-03-08 | Lg Electronics Inc. | Moving robot, method for controlling moving robot, and moving robot system |
| US11561275B2 (en) | 2018-08-03 | 2023-01-24 | Lg Electronics Inc. | Moving robot, method for controlling the same, and terminal |
| WO2023063514A1 (ko) * | 2021-10-15 | 2023-04-20 | 에브리봇 주식회사 | 이동 로봇 |
| US11960278B2 (en) | 2018-08-05 | 2024-04-16 | Lg Electronics Inc. | Moving robot and controlling method thereof |
| US11989017B2 (en) | 2018-08-05 | 2024-05-21 | Lg Electronics Inc. | Station apparatus and moving robot system |
| WO2024131213A1 (zh) * | 2022-12-23 | 2024-06-27 | 深圳乐动机器人股份有限公司 | 机器人定位方法、系统及机器人 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20080052127A (ko) * | 2006-12-05 | 2008-06-11 | 한국전자통신연구원 | 청소 로봇의 충전 스테이션으로의 복귀 방법 및 장치 |
| KR20090077547A (ko) * | 2008-01-11 | 2009-07-15 | 삼성전자주식회사 | 이동 로봇의 경로 계획 방법 및 장치 |
| JP2011172565A (ja) * | 2010-02-02 | 2011-09-08 | Deere & Co | ロボット境界用フェロモン |
| KR20130012517A (ko) * | 2011-07-25 | 2013-02-04 | 엘지전자 주식회사 | 로봇 청소기 및 이의 자가 진단 방법 |
| US20140222279A1 (en) * | 2009-11-06 | 2014-08-07 | Irobot Corporation | Methods and systems for complete coverage of a surface by an autonomous robot |
-
2015
- 2015-04-28 KR KR1020150059971A patent/KR102439184B1/ko active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20080052127A (ko) * | 2006-12-05 | 2008-06-11 | 한국전자통신연구원 | 청소 로봇의 충전 스테이션으로의 복귀 방법 및 장치 |
| KR20090077547A (ko) * | 2008-01-11 | 2009-07-15 | 삼성전자주식회사 | 이동 로봇의 경로 계획 방법 및 장치 |
| US20140222279A1 (en) * | 2009-11-06 | 2014-08-07 | Irobot Corporation | Methods and systems for complete coverage of a surface by an autonomous robot |
| JP2011172565A (ja) * | 2010-02-02 | 2011-09-08 | Deere & Co | ロボット境界用フェロモン |
| KR20130012517A (ko) * | 2011-07-25 | 2013-02-04 | 엘지전자 주식회사 | 로봇 청소기 및 이의 자가 진단 방법 |
Cited By (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11960289B2 (en) * | 2018-04-06 | 2024-04-16 | Lg Electronics Inc. | Moving robot and moving robot system |
| WO2019194636A1 (ko) * | 2018-04-06 | 2019-10-10 | 엘지전자 주식회사 | 이동로봇과 이동로봇의 제어방법 |
| KR20190123679A (ko) * | 2018-04-06 | 2019-11-01 | 엘지전자 주식회사 | 이동로봇과 이동로봇의 제어방법 |
| US20210096574A1 (en) * | 2018-04-06 | 2021-04-01 | Lg Electronics Inc. | Moving robot and moving robot system |
| WO2020027598A1 (en) * | 2018-08-03 | 2020-02-06 | Lg Electronics Inc. | Moving robot, moving robot system, and method for moving to charging station of moving robot |
| KR20200018216A (ko) * | 2018-08-03 | 2020-02-19 | 엘지전자 주식회사 | 이동 로봇, 이동 로봇 시스템 및 이동 로봇의 충전대 이동 방법 |
| WO2020027610A1 (en) * | 2018-08-03 | 2020-02-06 | Lg Electronics Inc. | Moving robot, system of moving robot and method for moving to charging station of moving robot |
| US11178811B2 (en) | 2018-08-03 | 2021-11-23 | Lg Electronics Inc. | Lawn mower robot, system of lawn mower robot and control method of lawn mower robot system |
| US11910742B2 (en) | 2018-08-03 | 2024-02-27 | Lg Electronics Inc. | Moving robot, system of moving robot and method for moving to charging station of moving robot |
| US11561275B2 (en) | 2018-08-03 | 2023-01-24 | Lg Electronics Inc. | Moving robot, method for controlling the same, and terminal |
| US11266067B2 (en) | 2018-08-03 | 2022-03-08 | Lg Electronics Inc. | Moving robot, method for controlling moving robot, and moving robot system |
| US11989017B2 (en) | 2018-08-05 | 2024-05-21 | Lg Electronics Inc. | Station apparatus and moving robot system |
| US11960278B2 (en) | 2018-08-05 | 2024-04-16 | Lg Electronics Inc. | Moving robot and controlling method thereof |
| US20210294348A1 (en) * | 2018-08-08 | 2021-09-23 | Positec Power Tools (Suzhou) Co., Ltd. | Self-moving device, automatic working system, and control method therefor |
| KR20200072276A (ko) * | 2018-12-12 | 2020-06-22 | 엘지전자 주식회사 | 이동 로봇 시스템 및 이동 로봇 시스템의 제어 방법 |
| WO2020122583A1 (en) * | 2018-12-12 | 2020-06-18 | Lg Electronics Inc. | Moving robot system and control method of the same |
| KR20190108530A (ko) * | 2019-09-04 | 2019-09-24 | 엘지전자 주식회사 | 이동 로봇 및 그의 구동 방법 |
| KR20210069547A (ko) * | 2019-12-03 | 2021-06-11 | 삼성전자주식회사 | 로봇 및 그 제어 방법 |
| WO2021112401A1 (en) * | 2019-12-03 | 2021-06-10 | Samsung Electronics Co., Ltd. | Robot and method for controlling thereof |
| US12094196B2 (en) | 2019-12-03 | 2024-09-17 | Samsung Electronics Co., Ltd. | Robot and method for controlling thereof |
| CN112161635B (zh) * | 2020-09-22 | 2022-07-05 | 中山大学 | 一种基于最小回环检测的协同建图方法 |
| CN112161635A (zh) * | 2020-09-22 | 2021-01-01 | 中山大学 | 一种基于最小回环检测的协同建图方法 |
| WO2023063514A1 (ko) * | 2021-10-15 | 2023-04-20 | 에브리봇 주식회사 | 이동 로봇 |
| WO2024131213A1 (zh) * | 2022-12-23 | 2024-06-27 | 深圳乐动机器人股份有限公司 | 机器人定位方法、系统及机器人 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR102439184B1 (ko) | 2022-09-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20160128124A (ko) | 이동 로봇 및 그 제어방법 | |
| KR20160128123A (ko) | 이동 로봇 및 그 제어방법 | |
| US11044845B2 (en) | Moving robot and control method thereof | |
| EP3494769B1 (en) | Mobile robot and control method thereof | |
| EP3238524B1 (en) | Moving robot and control method thereof | |
| EP1975046B1 (en) | Legged locomotion robot | |
| EP3168705A1 (en) | Domestic robotic system | |
| EP2684438B1 (en) | Boundary sensor assembly for a robotic lawn mower, robotic lawn mower and robotic lawn mower system | |
| US20090093907A1 (en) | Robot System | |
| US9817398B2 (en) | Control apparatus for autonomously navigating utility vehicle | |
| US9026299B2 (en) | Navigation system and method for autonomous mower | |
| JP2012105557A (ja) | 自動芝刈り機 | |
| US11852484B2 (en) | Method for determining the orientation of a robot, orientation determination apparatus of a robot, and robot | |
| CN111158356B (zh) | 自动割草机及其控制方法 | |
| KR20180039477A (ko) | 경로 계획 방법 및 장치 | |
| KR20160128126A (ko) | 이동 로봇 및 그 제어방법 | |
| JP5439552B2 (ja) | ロボットシステム | |
| CN117589153B (zh) | 一种地图更新的方法及机器人 | |
| CN118372850A (zh) | 一种路径规划方法、装置及自移动设备 | |
| JP6982105B2 (ja) | 作業機 | |
| CN114593726B (zh) | 路径平滑方法及其装置 | |
| CN120315473A (zh) | 一种巡检机器狗的充电对接确认方法 | |
| EP4653971A1 (en) | Operation method for autonomous operation device, and autonomous operation device | |
| Lee et al. | Development of a quadrocoptor robot with vision and ultrasonic sensors for distance sensing and mapping | |
| CN121323679A (zh) | 一种机器人在复杂场景下的导航方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
St.27 status event code: A-0-1-A10-A12-nap-PA0109 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-3-3-R10-R13-asn-PN2301 St.27 status event code: A-3-3-R10-R11-asn-PN2301 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-2-2-P10-P22-nap-X000 |
|
| A201 | Request for examination | ||
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-3-3-R10-R13-asn-PN2301 St.27 status event code: A-3-3-R10-R11-asn-PN2301 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| E13-X000 | Pre-grant limitation requested |
St.27 status event code: A-2-3-E10-E13-lim-X000 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U11-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| L13-X000 | Limitation or reissue of ip right requested |
St.27 status event code: A-2-3-L10-L13-lim-X000 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 4 |
|
| U11 | Full renewal or maintenance fee paid |
Free format text: ST27 STATUS EVENT CODE: A-4-4-U10-U11-OTH-PR1001 (AS PROVIDED BY THE NATIONAL OFFICE) Year of fee payment: 4 |