KR20170001984A - 차량용 후방 관제 시스템 - Google Patents
차량용 후방 관제 시스템 Download PDFInfo
- Publication number
- KR20170001984A KR20170001984A KR1020150091801A KR20150091801A KR20170001984A KR 20170001984 A KR20170001984 A KR 20170001984A KR 1020150091801 A KR1020150091801 A KR 1020150091801A KR 20150091801 A KR20150091801 A KR 20150091801A KR 20170001984 A KR20170001984 A KR 20170001984A
- Authority
- KR
- South Korea
- Prior art keywords
- image
- fluid lens
- lens
- vehicle
- fluid
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
- 238000012544 monitoring process Methods 0.000 title description 8
- 239000012530 fluid Substances 0.000 claims abstract description 182
- 230000008859 change Effects 0.000 claims abstract description 12
- 238000012545 processing Methods 0.000 claims description 46
- 238000000034 method Methods 0.000 claims description 16
- 238000001514 detection method Methods 0.000 description 6
- 238000010586 diagram Methods 0.000 description 5
- 230000000694 effects Effects 0.000 description 3
- 238000005516 engineering process Methods 0.000 description 3
- 238000003384 imaging method Methods 0.000 description 3
- 230000004075 alteration Effects 0.000 description 2
- 235000004522 Pentaglottis sempervirens Nutrition 0.000 description 1
- 238000004458 analytical method Methods 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 239000000470 constituent Substances 0.000 description 1
- 230000007547 defect Effects 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 239000000284 extract Substances 0.000 description 1
- 210000003195 fascia Anatomy 0.000 description 1
- 239000000446 fuel Substances 0.000 description 1
- 235000021189 garnishes Nutrition 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 229910044991 metal oxide Inorganic materials 0.000 description 1
- 150000004706 metal oxides Chemical class 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 230000007480 spreading Effects 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
Images










Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R1/00—Optical viewing arrangements; Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles
- B60R1/02—Rear-view mirror arrangements
- B60R1/08—Rear-view mirror arrangements involving special optical features, e.g. avoiding blind spots, e.g. convex mirrors; Side-by-side associations of rear-view and other mirrors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
-
- H04N5/225—
-
- H04N5/232—
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Multimedia (AREA)
- Closed-Circuit Television Systems (AREA)
- Traffic Control Systems (AREA)
- Studio Devices (AREA)
Abstract
본 발명의 실시예에 따른 차량용 후방 관제 시스템은 곡률이 가변되는 유체 렌즈를 포함하는 카메라, 상기 유체 렌즈를 통과한 빛을 촬상하여 화상 정보를 생성하는 이미지 센서, 차량의 변속단 정보를 수신하고, 수신된 상기 변속단 정보에 따라 상기 유체 렌즈의 곡률을 제어하여 상기 카메라의 화각을 변경하는 렌즈 제어부 및 상기 차량의 내부에 설치되어 상기 이미지 센서가 생성한 상기 화상 정보를 이미지로 출력하는 디스플레이부를 포함한다.
Description
본 발명은 차량용 후방 관제 시스템에 관한 것으로서, 보다 상세하게는 차량 후방에 대한 영상을 차량 내부에서 관측할 수 있는 차량용 후방 관제 시스템에 관한 것이다.
자동차 안전 관련 기술은 크게 두 분야로 나눌 수 있다. 능동안전과 수동 안전이다. 수동안전분야는 차량의 주행 안정성과 충돌 안전성이 대표적인 기술로써 사고를 유발할 수 있는 결함을 최소화하고 사고 발생시에는 피해를 최소화 하기 위한 기술이다.
자동차 수동안전분야에는 카메라를 활용한 편의 장치(ADAS: Advanced Driver Assistance System) 가 다양한 차종에 적용되고 있다. 주요 기술로 LDW(Lane Departure Warning System: 차선이탈 시 운전자에게 경보를 제공), AVM(Around View Monitoring: Birds eye view 기반의 주차 보조 시스템), CMS(Camera Monitor System) 등이 있다. 이러한 시스템은 초기에는 상위 차종에 적용되어 왔으나, 최근에는 하위 차종까지 확산이 되고 있다.
이러한 편의장치는 각 기능의 따라 별도의 카메라를 필요로 하고 있어, 차량 가격을 높이고, 각 기능에 따른 다수의 카메라 장착에 필요한 공간 및 디자인의 설계에 소요되는 시간, 비용 노력 등을 요구한다.
본 발명이 해결하고자 하는 과제는, 다양한 화각을 갖는 차량용 후방 관제 시스템을 제공하는 것이다.
또한, 하나의 차량용 후방 카메라를 이용해 다양한 기능을 수행하는 차량용 후방 관제 시스템을 제공하는 것이다.
본 발명의 과제들은 이상에서 언급한 과제로 제한되지 않으며, 언급되지 않은 또 다른 과제들은 아래의 기재로부터 당업자에게 명확하게 이해될 수 있을 것이다.
상기 과제를 해결하기 위한 본 발명의 실시예에 따른 차량용 후방 관제 시스템은 곡률이 가변되는 유체 렌즈를 포함하는 카메라, 상기 유체 렌즈를 통과한 빛을 촬상하여 화상 정보를 생성하는 이미지 센서, 차량의 변속단 정보를 수신하고, 수신된 상기 변속단 정보에 따라 상기 유체 렌즈의 곡률을 제어하여 상기 카메라의 화각을 변경하는 렌즈 제어부 및 상기 차량의 내부에 설치되어 상기 이미지 센서가 생성한 상기 화상 정보를 이미지로 출력하는 디스플레이부를 포함한다.
상기 변속단 정보가 D단에 해당하는 때에, 상기 렌즈 제어부는 상기 화각이 제1 화각이 되도록 상기 유체 렌즈의 곡률을 제어하고, 상기 변속단 정보가 R단 또는 P단인 때에, 상기 렌즈 제어부는 상기 화각이 상기 제1 화각보다 큰 제2 화각이 되도록 상기 유체 렌즈의 곡률을 제어할 수 있다.
상기 제1 화각은 110도 이상 130도 이하의 각도 범위를 가질 수 있다.
상기 제2 화각은 160도 이상의 각도 범위를 가질 수 있다.
상기 이미지 센서가 생성한 상기 화상 정보를 기초로 상기 차량의 후방 영상을 분석하는 영상 처리부를 더 포함하고, 상기 변속단 정보가 D단에 해당하는 때에, 상기 영상 처리부는 상기 후방 영상 내에서 차선을 검출하고, 상기 차량의 차선 이탈 가능성 또는 차선 이탈 여부를 판단할 수 있다.
상기 이미지 센서가 생성한 상기 화상 정보를 기초로 상기 차량의 후방 영상을 분석하는 영상 처리부를 더 포함하고, 상기 변속단 정보가 R단에 해당하는 때에, 상기 영상 처리부는 상기 후방 영상 내에서 이동하는 피사체를 검출하여 상기 디스플레이부에 출력되는 이미지 상에 표현할 수 있다.
상기 이미지 센서가 생성한 상기 화상 정보를 기초로 상기 차량의 후방 영상을 분석하는 영상 처리부 및 상기 차량의 트렁크 개폐를 제어하는 차량 제어부를 더 포함하며, 상기 변속단 정보가 P단에 해당하는 때에, 상기 영상 처리부는 상기 후방 영상 내에서 미리 설정된 모션을 검출하고, 상기 차량 제어부는 상기 영상 처리부가 상기 후방 영상 내에서 미리 설정된 모션을 검출한 때에 상기 트렁크를 개방할 수 있다.
상기 이미지 센서가 생성한 상기 화상 정보를 가공하는 영상 처리부 및 상기 차량의 내부에 설치되어 상기 영상 처리부가 가공한 상기 화상 정보를 이미지로 출력하는 제2 디스플레이부를 더 포함하고, 상기 영상 처리부는 상기 제2 디스플레이부에 출력되는 이미지가 상기 제2 화각보다 작은 제3 화각을 갖도록 상기 후방 영상을 크로핑(cropping) 처리할 수 있다.
상기 제3 화각은 22도 이상의 각도 범위를 가질 수 있다.
상기 유체 렌즈는 제1 유체 렌즈와 상기 제1 유체 렌즈보다 상기 이미지 센서에 인접하여 위치하는 제2 유체 렌즈를 포함하고, 상기 카메라는 상기 제1 유체 렌즈와 상기 제2 유체 렌즈 사이에 구비되는 적어도 하나의 비유체 렌즈를 더 포함할 수 있다.
상기 렌즈 제어부는, 상기 제1 유체 렌즈는 양의 굴절능을 갖고 상기 제2 유체 렌즈는 음의 굴절능을 갖도록 상기 제1 유체 렌즈 및 상기 제2 유체 렌즈의 곡률을 제어하여, 상기 카메라의 화각을 상기 제1 화각으로 제어하고, 상기 제1 유체 렌즈는 음의 굴절능을 갖고 상기 제2 유체 렌즈는 양의 굴절능을 갖도록 상기 제1 유체 렌즈 및 상기 제2 유체 렌즈의 곡률을 제어하여, 상기 카메라의 화각을 상기 제2 화각으로 제어할 수 있다.
상기 유체 렌즈는 상기 유체 렌즈를 출입하는 유체를 포함하며, 상기 렌즈 제어부는, 상기 유체의 출입량을 제어하여 상기 유체 렌즈의 곡률을 제어할 수 있다.
상기 유체 렌즈는, 전류 또는 전압에 의해 형상이 제어되는 유체를 포함하며, 상기 렌즈 제어부는 상기 유체에 전류 또는 전압을 인가하여 상기 유체 렌즈의 곡률을 제어할 수 있다.
본 발명의 기타 구체적인 사항들은 상세한 설명 및 도면들에 포함되어 있다.
본 발명의 실시예들에 의하면 적어도 다음과 같은 효과가 있다.
렌즈의 이동 없이도 차량용 후방 카메라의 화각을 조절할 수 있다.
하나의 차량용 후방 카메라를 이용해 차선 이탈 경고 기능, MOD(Moving Object Detection) 기능, RVM(Rear View Monitoring) 기능, 모션 기반 트렁크 개방 기능 및 디지털 룸미러 기능 등을 수행할 수 있다.
본 발명에 따른 효과는 이상에서 예시된 내용에 의해 제한되지 않으며, 더욱 다양한 효과들이 본 명세서 내에 포함되어 있다.
도 1은 본 발명의 일 실시예에 따른 차량용 후방 관제 시스템을 도시한 블록도이다.
도 2는 도 1의 차량용 후방 관제 시스템 중 차량 내부에 구비되는 구성 요소를 도시한 도면이다.
도 3은 도 1의 차량용 후방 관제 시스템 중 차량 외부에 구비되는 구성 요소를 도시한 도면이다.
도 4는 도 1의 후방 카메라가 제1 화각을 갖는 예를 도시한 도면이다.
도 5는 도 1의 후방 카메라가 제2 화각을 갖는 예를 도시한 도면이다.
도 6 내지 도 8은 도 1의 차량용 후방 관제 시스템을 이용한 차선 이탈 경고 기능을 설명하기 위한 도면이다.
도 9는 도 1의 차량용 후방 관제 시스템을 이용한 MOD(Moving Object Detection) 기능을 설명하기 위한 도면이다.
도 10은 도 1의 차량용 후방 관제 시스템을 이용한 RVM(Rear View Monitoring) 기능을 설명하기 위한 도면이다.
도 11은 도 1의 차량용 후방 관제 시스템을 이용한 모션 기반 트렁크 개방 기능을 설명하기 위한 도면이다.
도 12는 도 1의 차량용 후방 관제 시스템을 이용한 디지털 룸미러 기능을 설명하기 위한 도면이다.
도 2는 도 1의 차량용 후방 관제 시스템 중 차량 내부에 구비되는 구성 요소를 도시한 도면이다.
도 3은 도 1의 차량용 후방 관제 시스템 중 차량 외부에 구비되는 구성 요소를 도시한 도면이다.
도 4는 도 1의 후방 카메라가 제1 화각을 갖는 예를 도시한 도면이다.
도 5는 도 1의 후방 카메라가 제2 화각을 갖는 예를 도시한 도면이다.
도 6 내지 도 8은 도 1의 차량용 후방 관제 시스템을 이용한 차선 이탈 경고 기능을 설명하기 위한 도면이다.
도 9는 도 1의 차량용 후방 관제 시스템을 이용한 MOD(Moving Object Detection) 기능을 설명하기 위한 도면이다.
도 10은 도 1의 차량용 후방 관제 시스템을 이용한 RVM(Rear View Monitoring) 기능을 설명하기 위한 도면이다.
도 11은 도 1의 차량용 후방 관제 시스템을 이용한 모션 기반 트렁크 개방 기능을 설명하기 위한 도면이다.
도 12는 도 1의 차량용 후방 관제 시스템을 이용한 디지털 룸미러 기능을 설명하기 위한 도면이다.
본 발명의 이점 및 특징, 그리고 그것들을 달성하는 방법은 첨부되는 도면과 함께 상세하게 후술되어 있는 실시예들을 참조하면 명확해질 것이다. 그러나 본 발명은 이하에서 개시되는 실시예들에 한정되는 것이 아니라 서로 다른 다양한 형태로 구현될 수 있으며, 단지 본 실시예들은 본 발명의 개시가 완전하도록 하고, 본 발명이 속하는 기술분야에서 통상의 지식을 가진 자에게 발명의 범주를 완전하게 알려주기 위해 제공되는 것이며, 본 발명은 청구항의 범주에 의해 정의될 뿐이다. 명세서 전체에 걸쳐 동일 참조 부호는 동일 구성 요소를 지칭한다.
또한, 본 명세서에서 기술하는 실시예들은 본 발명의 이상적인 예시도인 단면도 및/또는 개략도들을 참고하여 설명될 것이다. 따라서, 제조 기술 및/또는 허용 오차 등에 의해 예시도의 형태가 변형될 수 있다. 또한 본 발명에 도시된 각 도면에 있어서 각 구성 요소들은 설명의 편의를 고려하여 다소 확대 또는 축소되어 도시된 것일 수 있다. 명세서 전체에 걸쳐 동일 참조 부호는 동일 구성 요소를 지칭한다.
이하, 본 발명의 일 실시예에 따른 차량용 후방 관제 시스템을 설명하기 위한 도면들을 참고하여 본 발명에 대하여 설명하도록 한다.
도 1은 본 발명의 일 실시예에 따른 차량용 후방 관제 시스템을 도시한 블록도이고, 도 2는 도 1의 차량용 후방 관제 시스템 중 차량 내부에 구비되는 구성 요소를 도시한 도면이며, 도 3은 도 1의 차량용 후방 관제 시스템 중 차량 외부에 구비되는 구성 요소를 도시한 도면이다.
도 1에 도시된 바와 같이, 본 발명의 일 실시예에 따른 차량용 후방 관제 시스템은 제1 디스플레이부(10), 제2 디스플레이부(20), 클러스터(30), 영상 처리부(40), 차량 제어부(50) 및 후방 카메라(70)를 포함한다.
도 2에 도시된 바와 같이, 제1 디스플레이부(10), 제2 디스플레이부(20) 및 클러스터(30)는 차량의 실내에 구비된다.
제1 디스플레이부(10)는 차량의 센터페시아에 장착되는 모니터일 수 있고, 제2 디스플레이부(20)는 기존의 룸미러를 대체하는 리어뷰 모니터일 수 있다.
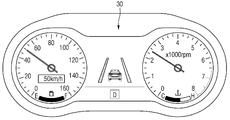
클러스터(30)는 차량 속도, 엔진 RPM, 연료량 등 차량의 각종 정보를 운전자에게 제공하는 구성일 수 있다. 도 1에 도시된 바와 같이, 클러스터(30)는 스티어링 휠의 후방에 위치하는 계기판일 수 있으며, 운전석 주변에 형성되어 운전자가 운전 중에 시각적 및/또는 청각적으로 확인할 수 있는 정보를 제공하는 구성을 포함한다.
도 3에 도시된 바와 같이, 트렁크(60) 및 후방 카메라(70)는 차량의 외부, 구체적으로 차량의 후미에 구비된다.
후방 카메라(70)는 차량의 후방을 지향하도록 설치되며, 일례로서, 도 3에 도시된 바와 같이, 트렁크(60)의 가니쉬(61) 하단에 장착될 수 있다.
도 1에 도시된 바와 같이, 후방 카메라(70)는 렌즈 유닛(71), 이미지 센서(72) 및 렌즈 제어부(73)를 포함한다.
렌즈 유닛(71)은 유체의 출입에 의해 렌즈의 곡률이 변화하는 적어도 하나의 유체 렌즈(71a, 71b, 71c; 도 4 참고)를 포함한다.
렌즈 제어부(73)는 유체 렌즈(71a, 71b, 71c)로 출입하는 유체량을 제어하여 유체 렌즈(71a, 71b, 71c)의 곡률을 제어할 수 있다.
또는, 렌즈 제어부(73)는 유체 렌즈(71a, 71b, 71c) 내에 포함된 유체에 전압/전류를 인가하여 유체 렌즈(71a, 71b, 71c)의 곡률을 제어할 수 있다. 이 경우, 유체 렌즈(71a, 71b, 71c) 내에 포함된 유체는 전류 또는 전압에 의해 형상이 제어되는 유체일 수 있다.
렌즈 제어부(73)는 후술하는 차량 제어부(50)로부터 차량의 변속단 정보를 수신하고, 수신된 변속단 정보에 따라 유체 렌즈(71a, 71c, 71d)의 곡률을 제어한다.
렌즈 제어부(73)에 의해 제어되는 유체 렌즈(71a, 71b, 71c)의 곡률에 따라, 후방 카메라(70)는 광각이 달라지게 된다.
이미지 센서(72)는 수광되는 빛을 전기적인 신호로 변환하는 구성 요소이다. 이미지 센서(72)의 일례로는, CCD(Charge-Coupled Device), CMOS(Complementary Metal Oxide Semiconductor) 등이 있다.
영상 처리부(40)는 이미지 센서(72)에서 전기적인 신호로 변환된 화상 정보를 수신하여 이를 이미지로 재구성하고, 재구성된 이미지를 제1 디스플레이부(10) 및/또는 제2 디스플레이부(20)를 통해 디스플레이할 수 있다.
또한, 영상 처리부(40)는 재구성된 이미지를 기초로 후술하는 차선 이탈 경고, MOD(Moving Object Detection), RVM(Rear View Monitoring), 모션 기반 트렁크 개방, 디지털 룸미러 등의 기능을 수행하기 위한 영상 처리를 수행한다. 이에 대한 자세한 내용을 후술한다.
차량 제어부(60)는 차량의 구동 계통, 제동 계통, 조향 계통 등을 제어하는 ECU(electronic control unit)일 수 있다. 차량 제어부(50)는 차량의 변속단 정보를 렌즈 제어부(73)로 전송한다. 또한, 차량 제어부(50)는 트렁크 개폐를 제어할 수 있다. 또한, 차량 제어부(50)는 클러스터(30)를 통해 차량의 각종 정보를 표시할 수 있다.
도 4는 도 1의 후방 카메라가 제1 화각을 갖는 예를 도시한 도면이다.
도 4에 도시된 바와 같이, 후방 카메라(70)의 렌즈 유닛(71)은 제1 유체 렌즈(71a), 제2 유체 렌즈(71b), 제3 유체 렌즈(71c) 및 복수의 비유체 렌즈(71d)를 포함한다.
제1 유체 렌즈(71a), 제2 유체 렌즈(71b) 및 제3 유체 렌즈(71c)는 렌즈 제어부(73)에 의해 각 렌즈(71a, 71b, 71c) 내부로 유출입되는 유체의 양에 의해 곡률이 변화하는 구성을 가질 수 있다.
또는, 제1 유체 렌즈(71a), 제2 유체 렌즈(71b) 및 제3 유체 렌즈(71c)는 렌즈 내에 전류 또는 전압에 의해 형상이 제어되는 유체를 포함한 렌즈일 수 있다. 이 경우, 렌즈 제어부(73)는 각 렌즈(71a, 71b, 71c) 내의 유체로 전압/전류를 인가하여 각 렌즈(71a, 71b, 71c)을 제어할 수 있다.
한편, 비유체 렌즈(71d)는 곡률이 고정되는 렌즈로서 글래스 또는 플라스틱으로 만들어진 렌즈일 수 있다.
도 4에는 렌즈 유닛(71) 구성의 일례로서, 3개의 유체 렌즈(71a, 71b, 71c)와 복수의 비유체 렌즈(71d)가 조합된 예를 도시하였으나, 유체 렌즈 및 비유체 렌즈의 수, 배열 순서 등은 필요에 따라 변경될 수 있다.
제1 유체 렌즈(71a)는 렌즈 유닛(71)에서 최초로 빛을 수광하는 렌즈이다. 도 4에 도시된 바와 같이, 제1 유체 렌즈(71a)와 제2 유체 렌즈(71b) 사이에는 복수의 비유체 렌즈(71d)가 구비된다. 복수의 비유체 렌즈(71d)는 렌즈 유닛(71)의 광축 조정, 집광, 비네팅, 구면수차, 색수차 등을 개선하는 기능을 수행한다.
제2 유체 렌즈(71b)는 복수의 비유체 렌즈(71d)를 통과한 빛을 수광하고, 제3 유체 렌즈(71c)는 제2 유체 렌즈(71b)를 통과한 빛을 수광하도록 배열된다.
도 4에 도시된 바와 같이, 후방 카메라(70)가 제1 화각을 갖도록, 렌즈 제어부(73)는 제1 유체 렌즈(71a)가 양의 굴절능을 갖도록 제1 유체 렌즈(71a)의 곡률을 제어하고, 제2 유체 렌즈(71b) 및 제3 유체 렌즈(71c)는 음의 굴절능을 갖도록 제2 유체 렌즈(71b) 및 제3 유체 렌즈(71c)의 곡률을 제어한다.
도 4에 도시된 바와 같이, 양의 굴절능을 갖도록 곡률이 제어된 제1 유체 렌즈(71a)는 빛(L1, L2, L3)이 수렴되도록 굴절시킨다. 제1 유체 렌즈(71a)를 통과한 빛(L1, L2, L3)은 복수의 비유체 렌즈(71d)를 통과한 후, 제2 유체 렌즈(71b)과 제3 유체 렌즈(71c)를 순차적으로 통과하며 굴절된다.
도 4에 도시된 바와 같이, 음의 굴절능을 갖도록 곡률이 제어된 제2 유체 렌즈(71b) 및 제3 유체 렌즈(71c)은 빛(L1, L2, L3)이 확산되도록 굴절시킨다.
도 4에 도시된 바와 같이, 제1 유체 렌즈(71a)는 양의 굴절능을 갖도록 제어하고, 제2 유체 렌즈(71b) 및 제3 유체 렌즈(71c)는 음의 굴절능을 갖도록 제어하면, 촬상 소자(72)으로 입사되는 빛은 좁은 화각의 것이 된다. 경우에 따라서는, 도 4에 도시된 바와 같이, 제1 유체 렌즈(71a)로 입사된 빛(L1, L2, L3) 중 일부(L1)은 제2 유체 렌즈(71b) 및 제3 유체 렌즈(71c)에 의해 확산되도록 굴절되어 촬상 소자(72)로 입사되지 않을 수 있다. 이 경우 후방 카메라(70)는 더욱 좁은 화각의 이미지를 얻게 된다.
한편, 도 5는 도 1의 후방 카메라가 제2 화각을 갖는 예를 도시한 도면이다. 제2 화각은 전술한 제1 화각보다 큰 화각을 의미한다.
도 5에 도시된 바와 같이, 후방 카메라(70)가 제2 화각을 갖도록, 렌즈 제어부(73)는 제1 유체 렌즈(71a)가 음의 굴절능을 갖도록 제1 유체 렌즈(71a)의 곡률을 제어하고, 제2 유체 렌즈(71b) 및 제3 유체 렌즈(71c)는 양의 굴절능을 갖도록 제2 유체 렌즈(71b) 및 제3 유체 렌즈(71c)의 곡률을 제어한다.
도 5에 도시된 바와 같이, 음의 굴절능을 갖도록 곡률이 제어된 제1 유체 렌즈(71a)는 빛(L4, L5)이 확산되도록 굴절시킨다. 제1 유체 렌즈(71a)를 통과한 빛(L4, L5)은 복수의 비유체 렌즈(71d)를 통과한 후, 제2 유체 렌즈(71b)과 제3 유체 렌즈(71c)를 순차적으로 통과하며 굴절된다.
도 5에 도시된 바와 같이, 양의 굴절능을 갖도록 곡률이 제어된 제2 유체 렌즈(71b) 및 제3 유체 렌즈(71c)은 빛(L4, L5)이 수렴되도록 굴절시킨다.
도 5에 도시된 바와 같이, 제1 유체 렌즈(71a)는 음의 굴절능을 갖도록 제어하고, 제2 유체 렌즈(71b) 및 제3 유체 렌즈(71c)는 양의 굴절능을 갖도록 제어하면, 촬상 소자(72)으로 입사되는 빛은 넓은 화각의 것이 된다.
후방 카메라(70)는 도 4의 상태에서 제1 화각의 이미지를 촬영하는데, 제1 화각은 110도 이상 130도 이하의 각도 범위를 가질 수 있다. 또한, 후방 카메라(70)는 도 5의 상태에서 제2 화각의 이미지를 촬영하는데, 제2 화각은 160도 이상의 각도 범위를 가질 수 있다.
도 4 및 도 5에 도시된 바와 같이, 제1 유체 렌즈(71a), 제2 유체 렌즈(71b) 및 제3 유체 렌즈(71c)의 곡률 또는 굴절능을 조절하여, 제1 유체 렌즈(71a), 제2 유체 렌즈(71b) 및 제3 유체 렌즈(71c) 중 적어도 하나와 이미지 센서(72) 간의 상대적인 거리를 변화시키지 않고 각 유체 렌즈(71a, 71b, 71c)의 초점 거리를 조절할 수 있고, 그 결과, 렌즈 유닛(71)의 화각을 조절할 수 있다.
종래의 카메라는 렌즈를 이동시켜 초점 거리를 조절하는 방식으로 카메라의 화각을 조절하였다. 그러나 렌즈를 이동시켜 화각을 조절하는 카메라는 렌즈를 이동시키기 위한 구조와 렌즈가 이동하기 위한 공간이 필요하여, 차량용 후방 카메라로 이용하기에는 적합하지 않다.
이에, 본 실시예에서는, 렌즈의 이동 없이도 초점 거리를 변경할 수 있는 유체 렌즈를 이용하여 후방 카메라(70)의 화각을 조절한다.
도 6 내지 도 8은 도 1의 차량용 후방 관제 시스템을 이용한 차선 이탈 경고 기능을 설명하기 위한 도면이다.
차선 이탈 경고 기능은 차선 이탈 경고 기능은 변속단이 D단에 있는 상태에서 작동될 수도 있다.
즉, 렌즈 제어부(73)는 차량 제어부(50)로부터 차량의 변속단 정보를 수신하여, 현재 차량의 변속단이 D에 있는 경우에, 도 4에 도시된 바와 같이, 제1 유체 렌즈(71a)가 양의 굴절능을 갖도록 제1 유체 렌즈(71a)의 곡률을 제어하고, 제2 유체 렌즈(71b) 및 제3 유체 렌즈(71c)는 음의 굴절능을 갖도록 제2 유체 렌즈(71b) 및 제3 유체 렌즈(71c)의 곡률을 제어할 수 있다.
그 결과, 후방 카메라(70)는 상대적으로 좁은 제1 화각을 갖게 된다. 바람직하게는, 차선 이탈 경고 기능을 위해 각 유체 렌즈(71a, 71b, 71c)는 후방 카메라(70)가 120도의 화각을 갖도록 제어될 수 있다.
도 6에 도시된 바와 같이, 영상 처리부(40)는 이미지 센서(72)로부터 화상 정보를 수신하여 후방 카메라(70)가 촬영한 이미지(I1)를 생성한다.
그리고, 영상 처리부(40)는 이미지(I1) 내에서 차선(A)을 인식하고, 이미지(I1) 내의 차선(A) 위치를 통해 차량의 차선 이탈 여부를 판단한다.
예를 들어, 도 7에 도시된 바와 같이, 영상 처리부(40)는 이미지(I2) 내에서 일측의 차선(A)이 미리 결정된 임계 라인(B)을 넘어서는 경우를 차량이 차선을 이탈한 상태로 판단할 수 있다. 그리고, 이미지(I2) 내에서 일측의 차선(A)이 미리 결정된 임계 라인(B)에 근접하는 경우를 차량이 차선을 이탈할 가능성이 존재하는 상태로 판단할 수 있다.
영상 처리부(40)는 차량의 차선 이탈 가능성이 존재한다고 판단하거나 차량이 차선을 이탈한 상태라고 판단되는 경우에는 차량 제어부(50)에 차선 이탈 경고 신호를 전송한다. 영상 처리부(40)로부터 차선 이탈 경고 신호를 수신한 차량 제어부(50)는 도 8에 도시된 바와 같이, 클러스터(30)를 통해 차선 이탈 경고를 표지한다.
도 8에는 계기판 상의 클러스터(30)를 통해 차선 이탈 경고를 표지하는 경우를 예로 들었지만, 클러스터(30)는 계기판 이외에 운전석 주변에 별도로 형성되는 구성일 수 있으며, 차선 이탈 경고는 운전자가 운전 중에 시각적 및/또는 청각적으로 확인할 수 있는 정보를 포함한다.
종래의 차선 이탈 경고 기능은 주로 차량 전방에 별도로 구비되는 카메라를 통해 차량 전방의 영상을 획득하고 획득된 차량 전방의 영상 내에서 차선을 인식하여 차선 이탈 여부를 감지하고 이를 경고하는 방식임에 반해, 본 실시예에 따른 차선 이탈 경고 기능은 후방 카메라를 이용해 차량 후방의 영상을 획득하고 획득된 차량 후방의 영상 내에서 차선을 인식하고 이를 기초로 차선 이탈 가능성 및 차선 이탈 여부를 감지하여 이를 경고한다.
본 실시예에 따른 차선 이탈 경고 기능은 변속단이 D단에 있고, 차량의 속도가 일정 속도 이상인 경우에만 작동될 수도 있다.
이 경우, 차량 제어부(50)는 차량의 변속단 정보와 함께 차량의 속도 정보를 렌즈 제어부(73)로 전송할 수 있다. 렌즈 제어부(73)는 차량 제어부(50)로부터 차량의 변속단 정보 및 속도 정보를 수신하여, 상술한 기능이 수행되도록 각 유체 렌즈(71a, 71b, 71c)를 제어할 수 있다.
도 9는 도 1의 차량용 후방 관제 시스템을 이용한 MOD(Moving Object Detection) 기능을 설명하기 위한 도면이다.
MOD(Moving Object Detection)는 차량의 후방 영상을 통해 차량 후방에서 움직이는 피사체를 감지하는 기능이다. 차량 후방의 사각 지대에 존재하는 보행자 또는 장애물을 감지하고 이를 운전자가 인식할 수 있도록 하여 사고를 방지하기 위한 기능이다.
MOD 기능은 변속단이 R단에 위치하는 상태에서 작동된다.
즉, 렌즈 제어부(73)는 차량 제어부(50)로부터 차량의 변속단 정보를 수신하여, 현재 차량의 변속단이 R단에 있는 경우에, 도 5에 도시된 바와 같이, 제1 유체 렌즈(71a)가 음의 굴절능을 갖도록 제1 유체 렌즈(71a)의 곡률을 제어하고, 제2 유체 렌즈(71b) 및 제3 유체 렌즈(71c)는 양의 굴절능을 갖도록 제2 유체 렌즈(71b) 및 제3 유체 렌즈(71c)의 곡률을 제어할 수 있다.
그 결과, 후방 카메라(70)는 상대적으로 넓은 제2 화각을 갖게 된다. 바람직하게는, 각 유체 렌즈(71a, 71b, 71c)는 후방 카메라(70)가 180도의 화각을 갖도록 제어될 수 있다.
도 9에 도시된 바와 같이, 영상 처리부(40)는 이미지 센서(72)로부터 화상 정보를 수신하여 후방 카메라(70)가 촬영한 이미지들을 생성한다.
영상 처리부(40)는 시간 순으로 연속 촬영된 이미지들을 각 프레임(F1 ~ F3)마다 비교하여 이동하는 피사체(C1 ~ C3)를 검출한다.
예를 들어, 영상 처리부(40)는 현재 프레임(F3) 내에서 피사체(C3)를 감지하고, 현재 프레임(F3)과 이전 프레임(F2, F1)을 비교하여 이전 프레임(F2, F1) 내의 피사체(C2, C1)의 상대 위치를 비교하여 이동하는 피사체를 검출할 수 있다.
영상 처리부(40)는 제2 화각으로 촬영된 이미지를 제1 디스플레이부(10)를 통해 디스플레이할 수 있다.
그리고, 이동하는 피사체(C1 ~ C3)를 검출한 경우에는 도 9에 도시된 바와 같이, 피사체(C1 ~ C3)를 둘러싸는 박스가 함께 제1 디스플레이부(10)를 통해 디스플레이 되도록 각 프레임(F1 ~ F3)에 대한 영상 처리를 수행하여, 운전자가 제1 디스플레이부(10)를 통해 이동하는 피사체(C1 ~ C3)를 직관적으로 확인 가능하게 할 수 있다. 동시에 차량 제어부(50)를 통해 청각적으로 확인할 수 있는 알람 경고를 발생시킬 수 있다.
도 10은 도 1의 차량용 후방 관제 시스템을 이용한 RVM(Rear View Monitoring) 기능을 설명하기 위한 도면이다.
RVM(Rear View Monitoring) 기능은 차량의 후방 영상을 차량 내부의 모니터를 통해 디스플레이 하는 기능이다.
RVM 기능은 변속단이 R단에 위치하는 상태에서 작동될 수 있다.
즉, 렌즈 제어부(73)는 차량 제어부(50)로부터 차량의 변속단 정보를 수신하여, 현재 차량의 변속단이 R단에 있는 경우에, 도 5에 도시된 바와 같이, 제1 유체 렌즈(71a)가 음의 굴절능을 갖도록 제1 유체 렌즈(71a)의 곡률을 제어하고, 제2 유체 렌즈(71b) 및 제3 유체 렌즈(71c)는 양의 굴절능을 갖도록 제2 유체 렌즈(71b) 및 제3 유체 렌즈(71c)의 곡률을 제어할 수 있다.
그 결과, 후방 카메라(70)는 상대적으로 넓은 제2 화각을 갖게 된다. 바람직하게는, 각 유체 렌즈(71a, 71b, 71c)는 후방 카메라(70)가 180도의 화각을 갖도록 제어될 수 있다.
도 10에 도시된 바와 같이, 영상 처리부(40)는 이미지 센서(72)로부터 화상 정보를 수신하여 후방 카메라(70)가 촬영한 이미지(I3)를 생성한다.
이후, 영상 처리부(40)는 이미지(I3)의 중앙 영역(Z1)을 크로핑(cropping) 처리하여 제1 디스플레이부(10)를 통해 디스플레이되도록 한다. 180도의 화각을 갖는 이미지는 왜곡이 심해 사용자가 이미지를 통해 후방 상황을 직관적으로 인식하지 못할 수 있다.
따라서, 영상 처리부(40)는 이미지(I3)에서 중앙 영역(Z1)만을 제1 디스플레이부(10)에 표현하고, 이미지(I3)의 가장 자리 영역(Z2)은 표현되지 않도록 한다. 영상 처리부(40)는 중앙 영역(Z1)이 제2 화각보다 작은 화각이 되도록 이미지(I3)를 크로핑(cropping) 처리한다. 다만, 중앙 영역(Z1)의 화각은 130도 이상의 각도 범위 내에서 선택되는 것이 바람직하다.
전술한 MOD 기능이 동시에 구현되는 경우에는 도 10에 도시된 바와 같이, 이동하는 피사체를 둘러싸는 박스가 제1 디스플레이부(10)를 통해 디스플레이 되도록 이미지(I3)에 대한 영상 처리를 수행할 수 있다.
도 11은 도 1의 차량용 후방 관제 시스템을 이용한 모션 기반 트렁크 개방 기능을 설명하기 위한 도면이다.
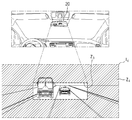
모션 기반 트렁크 개방 기능은 종래의 자동차 열쇠 또는 원격 제어 장치(Remote controller)를 이용해 트렁크를 개방하는 것이 아닌, 사용자의 특정 행동을 감지하여 트렁크를 개방하는 기능이다. 도 11에 도시된 바와 같이, 사용자(1)가 양손에 짐을 들고 있는 때에는 자동차 열쇠 또는 원격 제어 장치를 사용하는 것이 어려우므로 한쪽 다리를 좌우 또는 전후로 움직이는 모션으로 트렁크를 개방할 수 있다.
모션 기반 트렁크 개방 기능은 변속단이 P단에 위치하는 상태에서 작동될 수 있다.
즉, 렌즈 제어부(73)는 차량 제어부(50)로부터 차량의 변속단 정보를 수신하여, 현재 차량의 변속단이 P단에 있는 경우에, 도 5에 도시된 바와 같이, 제1 유체 렌즈(71a)가 음의 굴절능을 갖도록 제1 유체 렌즈(71a)의 곡률을 제어하고, 제2 유체 렌즈(71b) 및 제3 유체 렌즈(71c)는 양의 굴절능을 갖도록 제2 유체 렌즈(71b) 및 제3 유체 렌즈(71c)의 곡률을 제어할 수 있다.
그 결과, 후방 카메라(70)는 상대적으로 넓은 제2 화각을 갖게 된다. 바람직하게는, 각 유체 렌즈(71a, 71b, 71c)는 후방 카메라(70)가 180도의 화각을 갖도록 제어될 수 있다.
그리고, 차량의 변속단이 P단에 있는 상태로 시동이 OFF된 경우에는 후방 카메라(70)가 제2 화각을 유지하도록, 각 유체 렌즈(71a, 71b, 71c)의 곡률은 도 5의 상태를 유지할 수 있다.
영상 처리부(40)는 이미지 센서(72)로부터 화상 정보를 수신하여 후방 카메라(70)가 촬영한 이미지를 생성하고, 영상 처리부(40)는 시간 순으로 연속 촬영된 이미지들을 각 프레임마다 비교하여 미리 설정된 모션이 수행되었는지 여부를 판단한다.
예를 들어, 미리 설정된 모션이 차량(100)의 후방에서 사용자(1)가 다리를 좌우로 1회 또는 2회 흔드는 동작이라면, 영상 처리부(40)는 연속 촬영된 이미지들 내에서 다리를 추출하고, 연속 촬영된 이미지들의 조합에 의해 해당 모션의 수행 여부를 판단한다.
연속 촬영된 이미지들의 분석을 통해 트렁크 개방을 위한 모션이 정상적으로 수행된 것으로 판단되면, 영상 처리부(40)는 차량 제어부(50)에 트렁크 개방 신호를 전송한다. 영상 처리부(40)로부터 트렁크 개방 신호를 수신한 차량 제어부(50)는 트렁크(60)를 개방하는 제어를 수행한다.
스마트 키가 사용되는 차량의 경우에, 차량 제어부(50)는 스마트 키와의 통신 또는 스마트 키로부터 수신되는 신호를 감지하여 스마트 키가 차량에 인접하여 위치하는지를 판단하고, 스마트 키가 차량에 인접하여 위치하는 경우에만 트렁크(60)를 개방할 수 있다.
도 12는 도 1의 차량용 후방 관제 시스템을 이용한 디지털 룸미러 기능을 설명하기 위한 도면이다.
디지털 룸미러는 기존의 미러를 이용한 룸미러를 대체하여, 도 2 및 도 12에 도시된 바와 같이, 기존의 룸미러의 위치에 모니터(제2 디스플레이부(20))를 설치하고 차량 후방을 촬영하는 카메라를 통해 획득되는 영상을 모니터(제2 디스플레이부(20))에 디스플레이하는 방식을 의미한다.
디지털 룸미러 기능은 변속단에 관계없이 차량의 전원이 ON된 상태에서는 항상 작동될 수 있다.
디지털 룸미러 기능을 수행하기 위해 영상 처리부(40)는 이미지 센서(72)로부터 화상 정보를 수신하여 후방 카메라(70)가 촬영한 이미지(I4)를 생성한다.
이후, 영상 처리부(40)는 이미지(I4)의 중앙 영역(Z3)을 크로핑(cropping) 처리하여 제2 디스플레이부(20)를 통해 디스플레이되도록 한다.
즉, 영상 처리부(40)는 이미지(I4)에서 중앙 영역(Z3)만을 제2 디스플레이부(20)에 표현하고, 이미지(I4)의 가장 자리 영역(Z4)은 표현되지 않도록 한다. 영상 처리부(40)는 중앙 영역(Z3)이 제2 화각보다 작은 화각이 되도록 이미지(I4)를 크로핑(cropping) 처리한다.
또한, 룸미러는, 룸미러로부터 후방 60미터, 그리고 후방 60미터 지점에서 좌우로 20미터의 시야가 확보될 것이 요구된다. 또한, 좌우로 22.4도 이상의 시야가 확보될 것이 요구된다. 따라서, 영상 처리부(50)는 중앙 영역(Z3)의 이미지가 이러한 요구에 만족되도록 이미지(I4)를 크로핑(cropping) 처리할 수 있다.또한, 중앙 영역(Z3)은 종횡비가 제2 디스플레이부(20)의 것과 동일하도록 크로핑(cropping) 처리됨이 바람직하다.
이상 설명한 바와 같이, 본 발명의 일 실시예에 따른 차량용 후방 관제 시스템은 유체 렌즈를 이용해 광각을 조절함으로써, 하나의 차량용 후방 카메라를 이용해 차선 이탈 경고 기능, MOD(Moving Object Detection) 기능, RVM(Rear View Monitoring) 기능, 모션 기반 트렁크 개방 기능 및 디지털 룸미러 기능을 수행할 수 있다.
본 발명이 속하는 기술분야의 통상의 지식을 가진 자는 본 발명이 그 기술적 사상이나 필수적인 특징을 변경하지 않고서 다른 구체적인 형태로 실시될 수 있다는 것을 이해할 수 있을 것이다. 그러므로 이상에서 기술한 실시예들은 모든 면에서 예시적인 것이며 한정적이 아닌 것으로 이해해야만 한다. 본 발명의 범위는 상기 상세한 설명보다는 후술하는 특허청구범위에 의하여 나타내어지며, 특허청구범위의 의미 및 범위 그리고 그 균등 개념으로부터 도출되는 모든 변경 또는 변형된 형태가 본 발명의 범위에 포함되는 것으로 해석되어야 한다.
10: 제1 디스플레이
20: 제2 디스플레이
30: 클러스터 40: 영상 처리부
50: 차량 제어부 60: 트렁크
70: 후방 카메라 71: 렌즈 유닛
71a: 제1 유체 렌즈 71b: 제2 유체 렌즈
71c: 제3 유체 렌즈 71d: 비유체 렌즈
73: 렌즈 제어부 100: 차량
30: 클러스터 40: 영상 처리부
50: 차량 제어부 60: 트렁크
70: 후방 카메라 71: 렌즈 유닛
71a: 제1 유체 렌즈 71b: 제2 유체 렌즈
71c: 제3 유체 렌즈 71d: 비유체 렌즈
73: 렌즈 제어부 100: 차량
Claims (13)
- 곡률이 가변되는 유체 렌즈를 포함하는 카메라;
상기 유체 렌즈를 통과한 빛을 촬상하여 화상 정보를 생성하는 이미지 센서;
차량의 변속단 정보를 수신하고, 수신된 상기 변속단 정보에 따라 상기 유체 렌즈의 곡률을 제어하여 상기 카메라의 화각을 변경하는 렌즈 제어부; 및
상기 차량의 내부에 설치되어 상기 이미지 센서가 생성한 상기 화상 정보를 이미지로 출력하는 디스플레이부를 포함하는 차량용 후방 관제 시스템. - 제1항에 있어서,
상기 변속단 정보가 D단에 해당하는 때에, 상기 렌즈 제어부는 상기 화각이 제1 화각이 되도록 상기 유체 렌즈의 곡률을 제어하고,
상기 변속단 정보가 R단 또는 P단인 때에, 상기 렌즈 제어부는 상기 화각이 상기 제1 화각보다 큰 제2 화각이 되도록 상기 유체 렌즈의 곡률을 제어하는, 차량용 후방 관제 시스템. - 제2항에 있어서,
상기 제1 화각은 110도 이상 130도 이하의 각도 범위를 갖는, 차량용 후방 관제 시스템. - 제2항에 있어서,
상기 제2 화각은 160도 이상의 각도 범위를 갖는, 차량용 후방 관제 시스템. - 제2항에 있어서,
상기 이미지 센서가 생성한 상기 화상 정보를 기초로 상기 차량의 후방 영상을 분석하는 영상 처리부를 더 포함하고,
상기 변속단 정보가 D단에 해당하는 때에,
상기 영상 처리부는 상기 후방 영상 내에서 차선을 검출하고, 상기 차량의 차선 이탈 가능성 또는 차선 이탈 여부를 판단하는, 차량용 후방 관제 시스템. - 제2항에 있어서,
상기 이미지 센서가 생성한 상기 화상 정보를 기초로 상기 차량의 후방 영상을 분석하는 영상 처리부를 더 포함하고,
상기 변속단 정보가 R단에 해당하는 때에,
상기 영상 처리부는 상기 후방 영상 내에서 이동하는 피사체를 검출하여 상기 디스플레이부에 출력되는 이미지 상에 표현하는, 차량용 후방 관제 시스템. - 제2항에 있어서,
상기 이미지 센서가 생성한 상기 화상 정보를 기초로 상기 차량의 후방 영상을 분석하는 영상 처리부 및
상기 차량의 트렁크 개폐를 제어하는 차량 제어부를 더 포함하며,
상기 변속단 정보가 P단에 해당하는 때에,
상기 영상 처리부는 상기 후방 영상 내에서 미리 설정된 모션을 검출하고,
상기 차량 제어부는 상기 영상 처리부가 상기 후방 영상 내에서 미리 설정된 모션을 검출한 때에 상기 트렁크를 개방하는, 차량용 후방 관제 시스템. - 제2항에 있어서,
상기 이미지 센서가 생성한 상기 화상 정보를 가공하는 영상 처리부 및
상기 차량의 내부에 설치되어 상기 영상 처리부가 가공한 상기 화상 정보를 이미지로 출력하는 제2 디스플레이부를 더 포함하고,
상기 영상 처리부는 상기 제2 디스플레이부에 출력되는 이미지가 상기 제2 화각보다 작은 제3 화각을 갖도록 상기 후방 영상을 크로핑(cropping) 처리하는, 차량용 후방 관제 시스템. - 제8항에 있어서,
상기 제3 화각은 22도 이상의 각도 범위를 갖는, 차량용 후방 관제 시스템. - 제1항에 있어서,
상기 유체 렌즈는 제1 유체 렌즈와 상기 제1 유체 렌즈보다 상기 이미지 센서에 인접하여 위치하는 제2 유체 렌즈를 포함하고,
상기 카메라는 상기 제1 유체 렌즈와 상기 제2 유체 렌즈 사이에 구비되는 적어도 하나의 비유체 렌즈를 더 포함하는, 차량용 후방 관제 시스템. - 제10항에 있어서,
상기 렌즈 제어부는,
상기 제1 유체 렌즈는 양의 굴절능을 갖고 상기 제2 유체 렌즈는 음의 굴절능을 갖도록 상기 제1 유체 렌즈 및 상기 제2 유체 렌즈의 곡률을 제어하여, 상기 카메라의 화각을 상기 제1 화각으로 제어하고,
상기 제1 유체 렌즈는 음의 굴절능을 갖고 상기 제2 유체 렌즈는 양의 굴절능을 갖도록 상기 제1 유체 렌즈 및 상기 제2 유체 렌즈의 곡률을 제어하여, 상기 카메라의 화각을 상기 제2 화각으로 제어하는, 차량용 후방 관제 시스템. - 제1항에 있어서,
상기 유체 렌즈는 상기 유체 렌즈를 출입하는 유체를 포함하며,
상기 렌즈 제어부는, 상기 유체의 출입량을 제어하여 상기 유체 렌즈의 곡률을 제어하는, 차량용 후방 관제 시스템. - 제1항에 있어서,
상기 유체 렌즈는, 전류 또는 전압에 의해 형상이 제어되는 유체를 포함하며,
상기 렌즈 제어부는 상기 유체에 전류 또는 전압을 인가하여 상기 유체 렌즈의 곡률을 제어하는, 차량용 후방 관제 시스템.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020150091801A KR20170001984A (ko) | 2015-06-29 | 2015-06-29 | 차량용 후방 관제 시스템 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020150091801A KR20170001984A (ko) | 2015-06-29 | 2015-06-29 | 차량용 후방 관제 시스템 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20170001984A true KR20170001984A (ko) | 2017-01-06 |
Family
ID=57832271
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020150091801A Withdrawn KR20170001984A (ko) | 2015-06-29 | 2015-06-29 | 차량용 후방 관제 시스템 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR20170001984A (ko) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20230038383A (ko) | 2021-09-10 | 2023-03-20 | 임채환 | 지도단어의 개발과 실행 절차 1 |
-
2015
- 2015-06-29 KR KR1020150091801A patent/KR20170001984A/ko not_active Withdrawn
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20230038383A (ko) | 2021-09-10 | 2023-03-20 | 임채환 | 지도단어의 개발과 실행 절차 1 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5099451B2 (ja) | 車両周辺確認装置 | |
| KR101950476B1 (ko) | 운전자 상태 감지 시스템, 운전자 상태 감지 방법 및 운전자 감지 시스템을 장착한 차량 | |
| EP2950521B1 (en) | Camera capable of reducing motion blur in a low luminance environment and vehicle including the same | |
| KR101789984B1 (ko) | 차량용 사이드 미러 카메라 시스템 | |
| KR101986734B1 (ko) | 차량 운전 보조 장치 및 이의 안전 운전 유도 방법 | |
| KR102130059B1 (ko) | 디지털 백미러 제어 유닛 및 방법 | |
| US20220130155A1 (en) | Adaptive monitoring of a vehicle using a camera | |
| CN106454310A (zh) | 用于增强车辆视觉性能的聚焦系统 | |
| WO2020195770A1 (ja) | 状態検出装置、状態検出システム及び状態検出方法 | |
| JP2020024532A (ja) | 脇見運転検出装置 | |
| CN114270798B (zh) | 摄像装置 | |
| CN118876865A (zh) | 一种基于电子后视镜的变道辅助方法及系统 | |
| JP2021077141A (ja) | 車両制御装置及び運転者状態判定方法 | |
| JP2018162030A (ja) | 車両用表示装置 | |
| US9662979B2 (en) | Method for presenting safety information, driver assistance system and motor vehicle | |
| US20230174074A1 (en) | In-cabin safety sensor installed in vehicle and method of providing service platform thereof | |
| KR102494530B1 (ko) | 차량에 설치되어 졸음운전 및 부주의 운전 인식 서비스를 제공할 수 있는 카메라 장치 및 그 서비스 제공방법 | |
| KR102457633B1 (ko) | 차량 외부 측전방 상태 확인 장치 | |
| CN118804862A (zh) | 用于基于眼睛注视的警觉性测量的系统和方法 | |
| JP7695101B2 (ja) | 移動体、撮像システム、および撮像装置 | |
| CN115303181A (zh) | 用于辅助驾驶员监控车辆外部环境的方法和设备 | |
| KR102010407B1 (ko) | 스마트 리어뷰 시스템 | |
| KR20170001984A (ko) | 차량용 후방 관제 시스템 | |
| US11778316B2 (en) | Imaging apparatus | |
| KR20230073790A (ko) | 적응형 부주의 판단 기능을 이용한 운전자 자세제어 시스템 및 제어 방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
Patent event code: PA01091R01D Comment text: Patent Application Patent event date: 20150629 |
|
| PG1501 | Laying open of application | ||
| PC1203 | Withdrawal of no request for examination |