KR20170020930A - 네트워크 시스템, 타임 마스터국, 및 타임 슬레이브국 - Google Patents
네트워크 시스템, 타임 마스터국, 및 타임 슬레이브국 Download PDFInfo
- Publication number
- KR20170020930A KR20170020930A KR1020177003890A KR20177003890A KR20170020930A KR 20170020930 A KR20170020930 A KR 20170020930A KR 1020177003890 A KR1020177003890 A KR 1020177003890A KR 20177003890 A KR20177003890 A KR 20177003890A KR 20170020930 A KR20170020930 A KR 20170020930A
- Authority
- KR
- South Korea
- Prior art keywords
- master
- slave
- time
- time information
- cooperative operation
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images






Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04J—MULTIPLEX COMMUNICATION
- H04J3/00—Time-division multiplex systems
- H04J3/02—Details
- H04J3/06—Synchronising arrangements
- H04J3/0635—Clock or time synchronisation in a network
- H04J3/0638—Clock or time synchronisation among nodes; Internode synchronisation
- H04J3/0644—External master-clock
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L7/00—Arrangements for synchronising receiver with transmitter
- H04L7/04—Speed or phase control by synchronisation signals
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04J—MULTIPLEX COMMUNICATION
- H04J3/00—Time-division multiplex systems
- H04J3/02—Details
- H04J3/06—Synchronising arrangements
- H04J3/0635—Clock or time synchronisation in a network
- H04J3/0638—Clock or time synchronisation among nodes; Internode synchronisation
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04J—MULTIPLEX COMMUNICATION
- H04J3/00—Time-division multiplex systems
- H04J3/02—Details
- H04J3/06—Synchronising arrangements
- H04J3/0635—Clock or time synchronisation in a network
- H04J3/0676—Mutual
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L7/00—Arrangements for synchronising receiver with transmitter
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04J—MULTIPLEX COMMUNICATION
- H04J3/00—Time-division multiplex systems
- H04J3/02—Details
- H04J3/06—Synchronising arrangements
- H04J3/0635—Clock or time synchronisation in a network
- H04J3/0638—Clock or time synchronisation among nodes; Internode synchronisation
- H04J3/0652—Synchronisation among time division multiple access [TDMA] nodes, e.g. time triggered protocol [TTP]
- H04J3/0655—Synchronisation among time division multiple access [TDMA] nodes, e.g. time triggered protocol [TTP] using timestamps
Landscapes
- Engineering & Computer Science (AREA)
- Computer Networks & Wireless Communication (AREA)
- Signal Processing (AREA)
- Synchronisation In Digital Transmission Systems (AREA)
- Electric Clocks (AREA)
Abstract
Description
도 2는 실시 형태 1에 따른 타임 마스터국 및 타임 슬레이브국을 나타내는 블록도이다.
도 3은 실시 형태 1에 따른 네트워크 시스템의 동작을 나타내는 순서도이다.
도 4는 실시 형태 1에 따른 네트워크 시스템의 동작을 나타내는 순서도이다.
도 5는 실시 형태 1에 따른 타임 슬레이브국의 동작을 나타내는 도면이다.
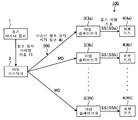
도 6은 실시 형태 1에 따른 네트워크 시스템의 동작을 나타내는 모식도이다.
도 7은 실시 형태 1에 따른 네트워크 시스템의 동작을 나타내는 모식도이다.
3: 타임 슬레이브국, 4: 외부 기기,
21: 마스터 클록, 22: 마스터 입력부,
23: 마스터 생성부, 24: 마스터 송신부,
25: 마스터 수신부, 31: 슬레이브 클록,
32: 슬레이브 수신부, 33: 슬레이브 생성부,
34: 슬레이브 출력부, 35: 슬레이브 송신부,
100: 네트워크 시스템, 200: 네트워크.
Claims (9)
- 협조 동작 타이밍 신호(cooperative-operation timing signal)를 협조 동작 주기로 출력하는 동기 마스터 장치(synchronous master device)와,
네트워크에 접속되는 타임 마스터국(time master station)과,
상기 네트워크에 접속되는 타임 슬레이브국(time slave station)을 구비하고,
상기 타임 마스터국은
시각을 카운트하는 마스터 클록과,
상기 동기 마스터 장치로부터 출력된 상기 협조 동작 타이밍 신호가 입력되는 마스터 입력부와,
상기 마스터 입력부에 입력된 상기 협조 동작 타이밍 신호와 상기 마스터 클록으로 카운트된 시각에 기초하여, 복수의 외부 기기를 협조 동작시키기 위한 기준이 되는 시각을 나타내는 슬레이브 협조 동작 시각 정보를 생성하기 위한 정보인 마스터 협조 동작 시각 정보를 생성하는 마스터 생성부와,
상기 마스터 생성부에서 생성된 상기 마스터 협조 동작 시각 정보를 송신하는 마스터 송신부를 가지고,
상기 타임 슬레이브국은,
시각을 카운트하는 슬레이브 클록과,
상기 마스터 송신부로부터 송신된 상기 마스터 협조 동작 시각 정보를 수신하는 슬레이브 수신부와,
상기 슬레이브 수신부에서 수신된 상기 마스터 협조 동작 시각 정보와 상기 슬레이브 클록으로 카운트된 시각과 상기 협조 동작 주기에 기초하여, 상기 슬레이브 협조 동작 시각 정보를 생성하는 슬레이브 생성부와,
상기 슬레이브 생성부에서 생성된 상기 슬레이브 협조 동작 시각 정보에 기초하여, 상기 외부 기기에 상기 동기 지령 신호를 출력하는 슬레이브 출력부를 가지는 것을 특징으로 하는 네트워크 시스템. - 청구항 1에 있어서,
상기 슬레이브 생성부는 상기 슬레이브 수신부에서 수신된 상기 마스터 협조 동작 시각 정보와 상기 협조 동작 주기에 기초하여, 상기 슬레이브 클록으로 카운트되는 시각이 상기 마스터 클록으로 카운트된 시각에 대해서 앞서 있는지 여부를 판정하고, 상기 판정 결과에 기초하여, 상기 슬레이브 협조 동작 시각 정보를 생성하는 것을 특징으로 하는 네트워크 시스템. - 청구항 1 또는 청구항 2에 있어서,
상기 마스터 생성부는 상기 마스터 입력부에 상기 협조 동작 타이밍 신호가 입력되어 있지 않다고 판정했을 때, 상기 협조 동작 주기와 상기 마스터 클록으로 카운트된 시각에 기초하여, 상기 마스터 협조 동작 시각 정보를 생성하는 것을 특징으로 하는 네트워크 시스템. - 청구항 1 내지 청구항 3 중 어느 한 항에 있어서,
상기 마스터 송신부는 동일한 상기 마스터 협조 동작 시각 정보를 미리 정해진 횟수만큼 연속 송신하는 것을 특징으로 하는 네트워크 시스템. - 청구항 1 내지 청구항 4 중 어느 한 항에 있어서,
상기 슬레이브 수신부는 동일한 상기 마스터 협조 동작 시각 정보를 복수 횟수 수신하는 것을 특징으로 하는 네트워크 시스템. - 청구항 1 내지 청구항 5 중 어느 한 항에 있어서,
상기 슬레이브 생성부는 상기 슬레이브 수신부에 상기 마스터 협조 동작 시각 정보가 수신되어 있지 않다고 판정했을 때, 상기 협조 동작 주기와 상기 슬레이브 클록으로 카운트된 시각에 기초하여, 상기 슬레이브 협조 동작 시각 정보를 생성하는 것을 특징으로 하는 네트워크 시스템. - 시각을 카운트하는 마스터 클록과,
협조 동작 주기로 출력되는 협조 동작 타이밍 신호가 입력되는 마스터 입력부와,
상기 마스터 입력부에 입력된 상기 협조 동작 타이밍 신호와 상기 마스터 클록으로 카운트된 시각에 기초하여, 복수의 외부 기기를 협조 동작시키기 위한 기준이 되는 시각을 나타내는 마스터 협조 동작 시각 정보를 생성하는 마스터 생성부와,
상기 마스터 생성부에서 생성된 상기 마스터 협조 동작 시각 정보를 타임 슬레이브국에 송신하는 마스터 송신부를 가지고,
상기 마스터 생성부는 상기 마스터 입력부에 상기 협조 동작 타이밍 신호가 입력되어 있지 않다고 판정했을 때, 상기 협조 동작 주기와 상기 마스터 클록으로 카운트된 시각에 기초하여, 상기 마스터 협조 동작 시각 정보를 생성하는 것을 특징으로 하는 타임 마스터국. - 청구항 7에 있어서,
상기 마스터 송신부는 동일한 상기 마스터 협조 동작 시각 정보를 미리 정해진 횟수만큼 연속 송신하는 것을 특징으로 하는 타임 마스터국. - 시각을 카운트하는 슬레이브 클록과,
타임 마스터국으로부터 협조 동작 주기로 송신되는 마스터 협조 동작 시각 정보를 수신하는 슬레이브 수신부와,
상기 슬레이브 수신부에서 수신된 상기 마스터 협조 동작 시각 정보와 상기 슬레이브 클록으로 카운트된 시각에 기초하여, 복수의 외무 기기를 협조 동작시키기 위한 기준이 되는 시각을 나타내는 슬레이브 협조 동작 시각 정보를 생성하는 슬레이브 생성부와,
상기 슬레이브 생성부에서 생성된 상기 슬레이브 협조 동작 시각 정보에 기초하여, 상기 외부 기기에 상기 동기 지령 신호를 출력하는 슬레이브 출력부를 가지고,
상기 슬레이브 생성부는, 상기 슬레이브 수신부에 상기 마스터 협조 동작 시각 정보가 수신되어 있지 않다고 판정했을 때, 상기 협조 동작 주기와 상기 슬레이브 클록으로 카운트된 시각에 기초하여, 상기 슬레이브 협조 동작 시각 정보를 생성하는 것을 특징으로 하는 타임 슬레이브국.
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2015/069690 WO2017006469A1 (ja) | 2015-07-08 | 2015-07-08 | ネットワークシステム、タイムマスタ局、及びタイムスレーブ局 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20170020930A true KR20170020930A (ko) | 2017-02-24 |
| KR101730313B1 KR101730313B1 (ko) | 2017-05-11 |
Family
ID=56997682
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020177003890A Active KR101730313B1 (ko) | 2015-07-08 | 2015-07-08 | 네트워크 시스템, 타임 마스터국, 및 타임 슬레이브국 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US9871609B2 (ko) |
| JP (1) | JP6000503B1 (ko) |
| KR (1) | KR101730313B1 (ko) |
| CN (1) | CN106576038B (ko) |
| DE (1) | DE112015003343B4 (ko) |
| TW (1) | TWI609576B (ko) |
| WO (1) | WO2017006469A1 (ko) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101730313B1 (ko) | 2015-07-08 | 2017-05-11 | 미쓰비시덴키 가부시키가이샤 | 네트워크 시스템, 타임 마스터국, 및 타임 슬레이브국 |
| JP6577511B2 (ja) * | 2017-04-24 | 2019-09-18 | 株式会社東芝 | 通信中継システム及び方法 |
| WO2020105130A1 (ja) * | 2018-11-20 | 2020-05-28 | 三菱電機株式会社 | 通信システム、リスト参照局、リスト配信局、通信方法、および通信プログラム |
| JP7439474B2 (ja) * | 2019-11-25 | 2024-02-28 | 富士電機株式会社 | プログラマブルコントローラシステムおよびモジュール |
| JP7700597B2 (ja) * | 2021-09-14 | 2025-07-01 | オムロン株式会社 | 情報収集システムおよび情報収集方法 |
| CN115834282B (zh) * | 2022-11-07 | 2024-08-06 | 交控科技股份有限公司 | 一种can总线通信方法、装置、设备及可读存储介质 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003271208A (ja) | 2002-03-15 | 2003-09-26 | Omron Corp | 制御装置及びシステム |
| JP2007184687A (ja) | 2006-01-04 | 2007-07-19 | Nec Corp | 伝搬遅延時間測定方法、同期方法、及び無線lanシステム |
| JP2009157913A (ja) | 2007-12-07 | 2009-07-16 | Omron Corp | 産業用コントローラ |
| JP2010057128A (ja) | 2008-08-29 | 2010-03-11 | Seiko Instruments Inc | 通信システム及び通信方法 |
| WO2012108387A1 (ja) | 2011-02-08 | 2012-08-16 | 三菱電機株式会社 | 通信システムの時刻同期方法、子局装置、親局装置、制御装置、並びにプログラム |
Family Cites Families (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11282812A (ja) | 1998-03-27 | 1999-10-15 | Mitsubishi Electric Corp | 分散時刻合わせ装置 |
| US6698022B1 (en) * | 1999-12-15 | 2004-02-24 | Fujitsu Limited | Timestamp-based timing recovery for cable modem media access controller |
| JP2001236134A (ja) | 2000-02-24 | 2001-08-31 | Toshiba Corp | ネットワークシステム |
| JP3748204B2 (ja) | 2000-11-27 | 2006-02-22 | 三菱電機株式会社 | 周期制御同期システム |
| JP4042396B2 (ja) | 2001-12-10 | 2008-02-06 | ソニー株式会社 | データ通信システム、データ送信装置、データ受信装置、および方法、並びにコンピュータ・プログラム |
| JP2004038414A (ja) | 2002-07-01 | 2004-02-05 | Seiko Epson Corp | 製造管理装置、製造管理方法および製造管理プログラム |
| JP3993508B2 (ja) * | 2002-12-02 | 2007-10-17 | 株式会社エヌ・ティ・ティ・ドコモ | 無線アクセスネットワークシステム、無線通信方法、同期サーバ及びノード装置 |
| US7434154B2 (en) | 2005-01-07 | 2008-10-07 | Dell Products L.P. | Systems and methods for synchronizing media rendering |
| JP2007101306A (ja) | 2005-10-03 | 2007-04-19 | Mitsubishi Electric Engineering Co Ltd | Plc用時刻同期装置 |
| JP2007213474A (ja) | 2006-02-13 | 2007-08-23 | Yaskawa Electric Corp | モーション制御システム |
| JP2008146149A (ja) | 2006-12-06 | 2008-06-26 | Yaskawa Electric Corp | 分散システムの同期処理装置および同期処理方法 |
| JP5120097B2 (ja) | 2008-06-20 | 2013-01-16 | 富士通株式会社 | 時間同期システムおよび時間同期装置 |
| JP4888741B2 (ja) | 2009-02-05 | 2012-02-29 | 横河電機株式会社 | 分散型制御システム |
| CN103392182B (zh) | 2010-08-02 | 2017-07-04 | 众有生物有限公司 | 用于发现遗传疾病中致病突变的系统和方法 |
| CN102231907B (zh) * | 2011-06-27 | 2017-03-22 | 中兴通讯股份有限公司 | 传输系统中的时钟同步方法和装置 |
| FI20126240A7 (fi) * | 2012-11-26 | 2014-05-27 | Tellabs Oy | Satelliittivastaanotinmoduuli tietoliikennelaitteistoa varten |
| TWI485996B (zh) | 2012-12-17 | 2015-05-21 | Ind Tech Res Inst | 致能一被動光網路具備支援時間同步能力的裝置與方法 |
| US9112631B2 (en) * | 2013-09-11 | 2015-08-18 | Khalifa University of Science, Technology, and Research | Method and devices for frequency distribution |
| JP6134622B2 (ja) * | 2013-09-24 | 2017-05-24 | 株式会社日立製作所 | 通信システム及び時刻同期方法 |
| CN104320238B (zh) * | 2014-10-21 | 2016-08-17 | 浙江大学 | 一种海底观测网大流量背景下的时间同步方法 |
| KR101730313B1 (ko) | 2015-07-08 | 2017-05-11 | 미쓰비시덴키 가부시키가이샤 | 네트워크 시스템, 타임 마스터국, 및 타임 슬레이브국 |
-
2015
- 2015-07-08 KR KR1020177003890A patent/KR101730313B1/ko active Active
- 2015-07-08 DE DE112015003343.2T patent/DE112015003343B4/de active Active
- 2015-07-08 CN CN201580043633.3A patent/CN106576038B/zh active Active
- 2015-07-08 WO PCT/JP2015/069690 patent/WO2017006469A1/ja not_active Ceased
- 2015-07-08 US US15/502,893 patent/US9871609B2/en active Active
- 2015-07-08 JP JP2016539346A patent/JP6000503B1/ja active Active
-
2016
- 2016-07-05 TW TW105121202A patent/TWI609576B/zh active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003271208A (ja) | 2002-03-15 | 2003-09-26 | Omron Corp | 制御装置及びシステム |
| JP2007184687A (ja) | 2006-01-04 | 2007-07-19 | Nec Corp | 伝搬遅延時間測定方法、同期方法、及び無線lanシステム |
| JP2009157913A (ja) | 2007-12-07 | 2009-07-16 | Omron Corp | 産業用コントローラ |
| JP2010057128A (ja) | 2008-08-29 | 2010-03-11 | Seiko Instruments Inc | 通信システム及び通信方法 |
| WO2012108387A1 (ja) | 2011-02-08 | 2012-08-16 | 三菱電機株式会社 | 通信システムの時刻同期方法、子局装置、親局装置、制御装置、並びにプログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6000503B1 (ja) | 2016-09-28 |
| TW201707404A (zh) | 2017-02-16 |
| CN106576038B (zh) | 2018-09-21 |
| US20170230126A1 (en) | 2017-08-10 |
| KR101730313B1 (ko) | 2017-05-11 |
| DE112015003343B4 (de) | 2022-08-11 |
| JPWO2017006469A1 (ja) | 2017-07-06 |
| DE112015003343T5 (de) | 2017-04-13 |
| CN106576038A (zh) | 2017-04-19 |
| TWI609576B (zh) | 2017-12-21 |
| US9871609B2 (en) | 2018-01-16 |
| WO2017006469A1 (ja) | 2017-01-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101730313B1 (ko) | 네트워크 시스템, 타임 마스터국, 및 타임 슬레이브국 | |
| US9548831B2 (en) | Synchronizing system, synchronizing method, first synchronizing device, second synchronizing device, and computer program | |
| KR102278867B1 (ko) | 네트워크 디바이스들의 클록들을 동기화하는 방법 | |
| US9838196B2 (en) | Synchronization apparatus, synchronization system, radio communication apparatus and synchronization method | |
| JP3748204B2 (ja) | 周期制御同期システム | |
| CN107710753A (zh) | 分散式同步的多传感器系统 | |
| KR101717407B1 (ko) | 링형 동기 네트워크 시스템 및 타임 슬레이브국 | |
| EP3444975A1 (en) | Method and apparatus for calibrating tdma time slot synchronization between master and slave machines | |
| US12127147B2 (en) | Synchronization correction method, master device and slave device | |
| US10853288B2 (en) | Bus system | |
| US20190141440A1 (en) | Wireless Microphone and/or In Ear Monitoring System and Method of Controlling a Wireless Microphone and/or In-Ear Monitoring System | |
| KR101704324B1 (ko) | 중계 장치 및 통신 시스템 및 중계 방법 | |
| US10222786B2 (en) | Numerical control system having synchronous control function between units | |
| TWM628940U (zh) | 主控裝置及僕裝置 | |
| JP5159829B2 (ja) | 時刻修正装置 | |
| US12130653B2 (en) | Delay time detection circuit, stamping information generation device, and delay time detection method | |
| JP2007282093A (ja) | クロック信号発生装置及び方法 | |
| TWI809564B (zh) | 同步校正方法、主控裝置及僕裝置 | |
| CN113359948A (zh) | 时间同步装置及同步方法 | |
| JPH08328691A (ja) | 遠方監視制御装置における時刻同期装置 | |
| JP2004320350A (ja) | 時刻同期方法および通信システム | |
| JPH09270783A (ja) | フレーム同期装置 | |
| JP2008070335A (ja) | 時刻較正制御装置及びその方法 | |
| JP2004266584A (ja) | 同期用パケットによるip端末の同期方法と装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| A302 | Request for accelerated examination | ||
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| PA0105 | International application |
St.27 status event code: A-0-1-A10-A15-nap-PA0105 |
|
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| PA0302 | Request for accelerated examination |
St.27 status event code: A-1-2-D10-D17-exm-PA0302 St.27 status event code: A-1-2-D10-D16-exm-PA0302 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U12-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 4 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 5 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 6 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 7 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 8 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 9 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 10 |
|
| U11 | Full renewal or maintenance fee paid |
Free format text: ST27 STATUS EVENT CODE: A-4-4-U10-U11-OTH-PR1001 (AS PROVIDED BY THE NATIONAL OFFICE) Year of fee payment: 10 |