KR20170021018A - 하지 보조로봇의 골격구조 - Google Patents
하지 보조로봇의 골격구조 Download PDFInfo
- Publication number
- KR20170021018A KR20170021018A KR1020150115266A KR20150115266A KR20170021018A KR 20170021018 A KR20170021018 A KR 20170021018A KR 1020150115266 A KR1020150115266 A KR 1020150115266A KR 20150115266 A KR20150115266 A KR 20150115266A KR 20170021018 A KR20170021018 A KR 20170021018A
- Authority
- KR
- South Korea
- Prior art keywords
- support member
- joint
- knee joint
- robot
- members
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images



Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/0006—Exoskeletons, i.e. resembling a human figure
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J17/00—Joints
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/0009—Constructional details, e.g. manipulator supports, bases
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/10—Program-controlled manipulators characterised by positioning means for manipulator elements
- B25J9/12—Program-controlled manipulators characterised by positioning means for manipulator elements electric
- B25J9/126—Rotary actuators
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Manipulator (AREA)
Abstract
Description
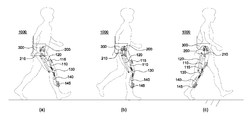
도 2는 본 발명의 일 실시 예에 따른 하지 보조로봇의 골격구조가 적용된 하지 보조로봇을 착용한 사용자의 유각기 중 하지 거동을 간략하게 도시한다.
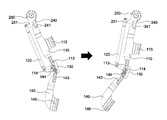
도 3은 본 발명의 일 실시 예에 따른 하지 보조로봇의 관절구조의 분해도이다.
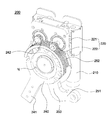
도 4는 본 발명의 일 실시 예에 따른 하지 보조로봇의 관절구조의 구동을 제어하는 구동장치의 내부 구성도를 도시한다.
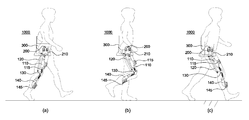
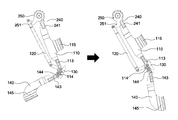
도 5는 본 발명의 일 실시 예에 따라 지면에 접촉한 후 사용자의 신체를 지지하는 하지에 적용된 하지 보조로봇의 골격구조를 도시한다.
도 6은 본 발명의 일 실시 예에 따라 지면을 지지한 후 지면을 뒤로 밀어 사용자의 신체를 앞으로 나아가게 하는 하지에 적용된 하지 보조로봇의 골격구조를 도시한다.
도 7은 지면과 떨어진 후 사용자의 체중 중심을 교차해 앞으로 나아가는 하지에 적용된 하지 보조로봇의 골격구조를 도시한다.
도 8은 지면과 떨어진 상태에서 사용자의 체중 중심을 교차한 상태에서 앞으로 나아가는 하지에 적용된 하지 보조로봇의 골격구조를 도시한다.
120 : 제2 대퇴 지지부재 130 : 무릎 관절부재
140 : 하퇴 지지부재 200 : 구동장치
240 : 제1 관절 구동부재 250 : 제2 관절 구동부재
1000 : 하지 보조로봇
Claims (14)
- 사용자의 고관절 영역에 장착되는 구동장치에서 구동력이 제공되는 하지 보조로봇의 골격구조에 있어서,
상기 하지 보조로봇의 구동장치에 일단이 각각 연결되어 미리 결정된 범위에서 구동되는 복수 개의 대퇴 지지부재;
복수 개의 상기 대퇴 지지부재의 타단에 연결되는 무릎 관절부재;
상기 무릎 관절부재에 일단이 장착되며, 복수 개의 상기 대퇴 지지부재의 움직임에 따라 상기 무릎 관절부재를 중심으로 구동되는 하퇴 지지부재;를 포함하는 하지 보조로봇의 골격구조. - 제1항에 있어서,
상기 대퇴 지지부재는 상기 하지 보조로봇의 구동장치에 일단이 연결되어 미리 결정된 범위에서 구동 가능한 제1 대퇴 지지부재 및 상기 제1 대퇴 지지부재와 독립적으로 상기 하지 보조로봇의 구동장치에 일단이 연결되고 타단은 상기 제1 대퇴 지지부재와 별도로 상기 무릎 관절부재에 연결되어 미리 결정된 범위에서 구동 가능한 제2 대퇴 지지부재를 포함하는 것을 특징으로 하는 하지 보조로봇의 골격구조. - 제2항에 있어서,
상기 제1 대퇴 지지부재 및 상기 제2 대퇴 지지부재는 상기 구동장치 및 상기 무릎 관절부재를 나란히 연결하는 것을 특징으로 하는 하지 보조로봇의 골격구조. - 제2항에 있어서,
상기 제1 대퇴 지지부재 및 상기 하퇴 지지부재는 하지 보조로봇 착용자의 대퇴 및 하퇴를 감싸는 형상을 갖도록 구성되는 것을 특징으로 하는 하지 보조로봇의 골격구조. - 제2항에 있어서,
상기 제1 대퇴 지지부재 및 제2 대퇴 지지부재는 상기 구동장치를 구성하는 제1 관절 구동부재 및 제2 관절 구동부재에 각각 연결되고, 상기 제1 관절 구동부재 및 상기 제2 관절 구동부재는 각각의 상기 제1 대퇴 지지부재 또는 제2 대퇴 지지부재를 독립적으로 회전 구동하거나 회전에 의한 견인 구동하는 것을 특징으로 하는 하지 보조로봇의 골격구조. - 제5항에 있어서,
상기 하퇴 지지부재는 상기 제1 관절 구동부재 및 상기 제2 관절 구동부재의 회전각 편차에 의하여 회전되는 것을 특징으로 하는 하지 보조로봇의 골격구조. - 제5항에 있어서,
상기 제1 대퇴 지지부재에 연결된 제1 관절 구동부재의 회전각에 따라 사용자의 고관절에 대한 대퇴의 회전각이 결정되는 것을 특징으로 하는 하지 보조로봇의 골격구조. - 제6항에 있어서,
상기 제1 대퇴 지지부재에 연결된 제1 관절 구동부재의 회전각과 상기 제2 대퇴 지지부재에 연결된 제2 관절 구동부재의 회전각 편차에 따라 상기 무릎 관절부재에 대한 상기 하퇴 지지부재의 회전각이 결정되는 것을 특징으로 하는 하지 보조로봇의 골격구조. - 제8항에 있어서,
상기 회전각 편차가 증가되면 상기 무릎 관절부재에 대한 상기 하퇴 지지부재의 회전각이 증가되는 것을 특징으로 하는 하지 보조로봇의 골격구조. - 제2항에 있어서,
상기 제1 대퇴 지지부재 및 상기 제2 대퇴 지지부재의 타단과 상기 하퇴 지지부재의 상단을 상기 무릎 관절부재에 회전 가능하게 연결하는 각각의 힌지축은 평행하게 상기 무릎 관절부재를 관통하도록 설치되는 것을 특징으로 하는 하지 보조로봇의 골격구조. - 제10항에 있어서,
상기 제1 대퇴 지지부재의 타단, 상기 제2 대퇴 지지부재의 타단 및 상기 하퇴 지지부재의 상단을 상기 무릎 관절부재에 회전 가능하게 연결하는 3개의 힌지축의 관통점은 삼각형의 꼭지점 형태로 배치되는 것을 특징으로 하는 하지 보조로봇의 골격구조. - 제11항에 있어서,
상기 3개의 힌지축의 관통점은 직각 삼각형 형태로 배치되며, 상기 제1 대퇴 지지부재의 타단은 직각 삼각형의 꼭지점 중 직각에 해당되는 꼭지점에 연결되는 것을 특징으로 하는 하지 보조로봇의 골격구조. - 제12항에 있어서,
상기 제1 대퇴 지지부재의 타단 및 상기 하퇴 지지부재의 일단은 각각의 힌지축을 중심으로 회전이 가능하되, 상호 회전이 종속되도록 각각의 힌지축은 기어로 접속되는 것을 특징으로 하는 하지 보조로봇의 골격구조. - 제2항에 있어서,
상기 무릎 관절부재에 상기 제1 대퇴 지지부재의 타단 및 상기 하퇴 지지부재의 회전 각도를 제한하기 위한 스토퍼가 구비되는 것을 특징으로 하는 하지 보조로봇의 골격구조.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020150115266A KR20170021018A (ko) | 2015-08-17 | 2015-08-17 | 하지 보조로봇의 골격구조 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020150115266A KR20170021018A (ko) | 2015-08-17 | 2015-08-17 | 하지 보조로봇의 골격구조 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020170078258A Division KR20170075699A (ko) | 2017-06-21 | 2017-06-21 | 하지 보조로봇의 골격구조 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20170021018A true KR20170021018A (ko) | 2017-02-27 |
Family
ID=58315857
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020150115266A Ceased KR20170021018A (ko) | 2015-08-17 | 2015-08-17 | 하지 보조로봇의 골격구조 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR20170021018A (ko) |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101862509B1 (ko) * | 2017-03-23 | 2018-05-29 | 성균관대학교산학협력단 | 보행로봇의 다리 구조체 |
| CN108670729A (zh) * | 2018-04-27 | 2018-10-19 | 深圳市迈步机器人科技有限公司 | 一种外骨骼机器人 |
| CN109124989A (zh) * | 2018-09-25 | 2019-01-04 | 深圳市丞辉威世智能科技有限公司 | 传动装置、下肢康复外骨骼和外骨骼机器人 |
| KR20190002953A (ko) * | 2017-06-30 | 2019-01-09 | 현대로템 주식회사 | 다절 링크 기구와 이를 이용한 하지 외골격 로봇 및 그 제어 방법 |
| US10973726B2 (en) | 2017-09-04 | 2021-04-13 | Samsung Electronics Co., Ltd | Motion assistance apparatus |
| CN115847381A (zh) * | 2023-02-16 | 2023-03-28 | 哈尔滨工业大学 | 可变换构型的并联下肢穿戴助力装置 |
| CN115946792A (zh) * | 2022-12-27 | 2023-04-11 | 上海智能制造功能平台有限公司 | 机器人的腿部结构及机器人 |
| WO2023063737A1 (ko) * | 2021-10-14 | 2023-04-20 | 조선대학교산학협력단 | 하지 보조 로봇 |
| US11707399B2 (en) | 2018-12-10 | 2023-07-25 | Samsung Electronics Co., Ltd. | Motion assistance apparatus |
-
2015
- 2015-08-17 KR KR1020150115266A patent/KR20170021018A/ko not_active Ceased
Cited By (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101862509B1 (ko) * | 2017-03-23 | 2018-05-29 | 성균관대학교산학협력단 | 보행로봇의 다리 구조체 |
| KR20190002953A (ko) * | 2017-06-30 | 2019-01-09 | 현대로템 주식회사 | 다절 링크 기구와 이를 이용한 하지 외골격 로봇 및 그 제어 방법 |
| US10973726B2 (en) | 2017-09-04 | 2021-04-13 | Samsung Electronics Co., Ltd | Motion assistance apparatus |
| CN108670729A (zh) * | 2018-04-27 | 2018-10-19 | 深圳市迈步机器人科技有限公司 | 一种外骨骼机器人 |
| CN108670729B (zh) * | 2018-04-27 | 2024-05-24 | 深圳市迈步机器人科技有限公司 | 一种外骨骼机器人 |
| CN109124989A (zh) * | 2018-09-25 | 2019-01-04 | 深圳市丞辉威世智能科技有限公司 | 传动装置、下肢康复外骨骼和外骨骼机器人 |
| CN109124989B (zh) * | 2018-09-25 | 2024-03-19 | 深圳市丞辉威世智能科技有限公司 | 传动装置、下肢康复外骨骼和外骨骼机器人 |
| US11707399B2 (en) | 2018-12-10 | 2023-07-25 | Samsung Electronics Co., Ltd. | Motion assistance apparatus |
| WO2023063737A1 (ko) * | 2021-10-14 | 2023-04-20 | 조선대학교산학협력단 | 하지 보조 로봇 |
| CN115946792A (zh) * | 2022-12-27 | 2023-04-11 | 上海智能制造功能平台有限公司 | 机器人的腿部结构及机器人 |
| CN115847381A (zh) * | 2023-02-16 | 2023-03-28 | 哈尔滨工业大学 | 可变换构型的并联下肢穿戴助力装置 |
| CN115847381B (zh) * | 2023-02-16 | 2023-07-14 | 哈尔滨工业大学 | 可变换构型的并联下肢穿戴助力装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20170021018A (ko) | 하지 보조로봇의 골격구조 | |
| CN104812352B (zh) | 辅助和康复下肢的机器人装置 | |
| KR20170075699A (ko) | 하지 보조로봇의 골격구조 | |
| KR20160148074A (ko) | 다관절 로봇의 구동장치 | |
| KR102360981B1 (ko) | 하지 보조기 및 보조기 | |
| CN104306133B (zh) | 具有各向同性的踝关节康复并联机构 | |
| KR20180023708A (ko) | 운동 보조 장치 | |
| KR102633470B1 (ko) | 착용형 보조장치 | |
| JP6120421B2 (ja) | 歩行支援機 | |
| WO2019131152A1 (ja) | 関節補助ユニット、歩行補助装置 | |
| CN112894765A (zh) | 可穿戴式肌肉力量辅助装置 | |
| KR101230458B1 (ko) | 무릎관절 재활운동기구 | |
| CN109984920A (zh) | 一种人机融合的膝关节康复机器人 | |
| CN105120821B (zh) | 机械连接结构 | |
| JP6883712B2 (ja) | 外骨格構造 | |
| KR20230170447A (ko) | 관절 구조체 및 그 관절 구조체를 포함하는 외골격 로봇 | |
| KR102418860B1 (ko) | 착용형 보조장치의 슬관절 구조 및 이를 구비하는 착용형 보조장치 | |
| JP2022075499A (ja) | 外骨格型着用ロボット | |
| KR102244673B1 (ko) | 다관절 로봇의 구동장치 | |
| KR102081911B1 (ko) | 재활 로봇 | |
| CN112873177B (zh) | 下肢外骨骼机器人 | |
| CN115151230B (zh) | 腿部致动设备和步态康复设备 | |
| US20250186232A1 (en) | Orthosis Comprising a Mechanical Hip Link with Three Degrees of Freedom | |
| KR102959413B1 (ko) | 다리 작동 장치 및 보행 재활 장치 | |
| EP4117597A1 (en) | Leg actuation apparatus and gait rehabilitation apparatus |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
Patent event code: PA01091R01D Comment text: Patent Application Patent event date: 20150817 |
|
| PA0201 | Request for examination | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20161019 Patent event code: PE09021S01D |
|
| PG1501 | Laying open of application | ||
| E601 | Decision to refuse application | ||
| PE0601 | Decision on rejection of patent |
Patent event date: 20170228 Comment text: Decision to Refuse Application Patent event code: PE06012S01D Patent event date: 20161019 Comment text: Notification of reason for refusal Patent event code: PE06011S01I |
|
| E601 | Decision to refuse application | ||
| E801 | Decision on dismissal of amendment | ||
| PE0601 | Decision on rejection of patent |
Patent event date: 20170530 Comment text: Decision to Refuse Application Patent event code: PE06012S01D Patent event date: 20161019 Comment text: Notification of reason for refusal Patent event code: PE06011S01I |
|
| PE0801 | Dismissal of amendment |
Patent event code: PE08012E01D Comment text: Decision on Dismissal of Amendment Patent event date: 20170530 Patent event code: PE08011R01I Comment text: Amendment to Specification, etc. Patent event date: 20170428 Patent event code: PE08011R01I Comment text: Amendment to Specification, etc. Patent event date: 20161208 |
|
| A107 | Divisional application of patent | ||
| PA0107 | Divisional application |
Comment text: Divisional Application of Patent Patent event date: 20170621 Patent event code: PA01071R01D |