KR20170023103A - 이미지 센서와 관련된 다수의 광 채널들을 갖는 복수 조리개 광학 유닛을 포지셔닝하기 위한 디바이스 및 방법 - Google Patents
이미지 센서와 관련된 다수의 광 채널들을 갖는 복수 조리개 광학 유닛을 포지셔닝하기 위한 디바이스 및 방법 Download PDFInfo
- Publication number
- KR20170023103A KR20170023103A KR1020177001650A KR20177001650A KR20170023103A KR 20170023103 A KR20170023103 A KR 20170023103A KR 1020177001650 A KR1020177001650 A KR 1020177001650A KR 20177001650 A KR20177001650 A KR 20177001650A KR 20170023103 A KR20170023103 A KR 20170023103A
- Authority
- KR
- South Korea
- Prior art keywords
- optics
- image
- iris
- target
- axis
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images






















Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/80—Analysis of captured images to determine intrinsic or extrinsic camera parameters, i.e. camera calibration
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N17/00—Diagnosis, testing or measuring for television systems or their details
- H04N17/002—Diagnosis, testing or measuring for television systems or their details for television cameras
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/50—Constructional details
- H04N23/54—Mounting of pick-up tubes, electronic image sensors, deviation or focusing coils
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/50—Constructional details
- H04N23/55—Optical parts specially adapted for electronic image sensors; Mounting thereof
-
- H04N5/2254—
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30204—Marker
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Biomedical Technology (AREA)
- General Health & Medical Sciences (AREA)
- Health & Medical Sciences (AREA)
- Length Measuring Devices By Optical Means (AREA)
- Studio Devices (AREA)
- Lens Barrels (AREA)
- Cameras In General (AREA)
- Stereoscopic And Panoramic Photography (AREA)
- Camera Bodies And Camera Details Or Accessories (AREA)
Abstract
Description
도 1은 일 실시예에 따라 이미지 센서와 관련하여 여러 개의 광 채널들을 포함하는 복수 조리개 광학기의 상대적 포지셔닝을 위한 디바이스의 개략적인 블록도를 보여준다.
도 2는 일 실시예에 따라 계산 디바이스가 고정 디바이스를 제어하도록 구성되는 도 1의 디바이스와 비교하여 업그레이드된 디바이스의 개략적인 블록도를 보여준다.
도 3a는 일 실시예에 따른 음의 롤 방향에 따라, 이미지 센서와 관련하여 위치 에러를 나타내는 복수 조리개 광학기의 개략적인 측단면도를 보여준다.
도 3b는 일 실시예에 따라 도 3a의 상황의 개략적인 상면도를 보여준다.
도 4a는 일 실시예에 따른 피치 축에 대해, 이미지 센서와 관련하여 쐐기 에러를 나타내는 복수 조리개 광학기의 개략적인 측단면도를 보여준다.
도 4b는 일 실시예에 따라 도 4a의 상황의 개략적인 상면도를 보여준다.
도 5는 일 실시예에 따라 요 축 또는 z축에 관한 각도로 이미지 센서와 관련하여 기울어진 복수 조리개 광학기의 개략적인 상면도를 보여준다.
도 6a는 일 실시예에 따른 요 축을 따라 이미지 센서와 관련하여 너무 작은 거리를 나타내는 복수 조리개 광학기의 개략적인 측단면도를 보여준다.
도 6b는 일 실시예에 따라 도 6a의 상황의 개략적인 상면도를 보여준다.
도 7a는 일 실시예에 따라 이미지 센서와 관련하여 복수 조리개 광학기가 너무 큰 거리 나타내는 상황의 개략적인 측단면도를 보여준다.
도 7b는 일 실시예에 따라 도 7a의 상황의 개략적인 상면도를 보여준다.
도 8은 일 실시예에 따라, 도 3a 및 도 3b에 대해 설명된 것과 같이, x 평행이동 및/또는 y 평행이동에 의해 이미지 센서와 관련하여 복수 조리개 광학기의 오프셋을 보정하기 위한 방법의 개략적인 흐름도를 보여준다.
도 9는 일 실시예에 따라, 도 4a 및 도 4b에 대해 설명된 것과 같이, 쐐기 에러를 보상하도록 계산 디바이스에 의해 수행될 수 있는 방법의 개략적인 흐름도를 보여준다.
도 10은 일 실시예에 따라, 도 5에 대해 설명된 것과 같이, 내측 이미지 영역의 요 축 또는 z축에 대한 비틀림을 보상하는 방법의 개략적인 흐름도를 보여준다.
도 11은 일 실시예에 따라, 도 6a, 도 6b, 도 7a 및 도 7b에 대해 설명된 것과 같이, z축 또는 요 축에 따른 평행이동에 의해 복수 조리개 광학기를 정렬하기 위한 방법의 개략적인 흐름도를 보여준다.
도 12는 일 실시예에 따라, 예를 들어 도 8, 도 9, 도 10 또는 도 11 중 임의의 도면의 방법들의 의 견고한 프로세스 흐름을 가능하게 하도록 상기 방법들 중 한 방법 이전에 수행될 수 있는 방법의 개략적 흐름도를 보여준다.
도 13은 일 실시예에 따라 6 자유도를 따라 높은 포지셔닝 정확도들이 유리하게 달성될 수 있는 방법의 개략적인 흐름도를 보여준다.
도 14는 일 실시예에 따라 이미지 영역에 대한 예로서 전역 좌표계와 국소 좌표계들 간의 관계들을 예시하기 위한 개략도를 보여준다.
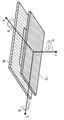
도 15는 일 실시예에 따라 광 채널들의 2D 정렬을 갖는 이미지 센서 및 복수 조리개 광학기를 포함하는 복수 조리개 대물렌즈에 의해 대상 평면에서 스캔하는 개략적인 표현을 보여준다.
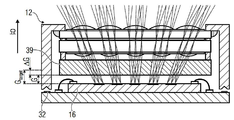
도 16은 일 실시예에 따라 도 15의 관계들을 예시하기 위해 복수 조리개 광학기 및 이미지 센서를 포함하는 개략적인 측단면도를 보여준다.
도 17a는 일 실시예에 따라 이미지 센서와 관련하여 조정되는 복수 조리개 광학기의 개략적인 측단면도를 보여준다.
도 17b는 일 실시예에 따라 도 17a의 상황의 개략적인 상면도를 보여준다.
도 18은 이미지 센서 칩을 형성하기 위한 복수 조리개 이미징 광학기의 조립 레이아웃의 개략적인 이미지를 보여준다.
도 19는 종래 기술에 따라 이미지 센서의 이미지 평면과 복수 조리개 광학기의 정렬에 관한 요건들을 예시하기 위한 개략적인 측단면도를 보여준다.


Claims (15)
- 이미지 센서(16)와 관련하여 여러 개의 광 채널들(14a-f)을 포함하는 복수 조리개 광학기(multi-aperture optics)(12)의 상대적 포지셔닝을 위한 디바이스(10)로서,
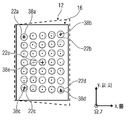
기준 대상(18) ― 상기 기준 대상(18)은 상기 광 채널들(14a-f)에서 복수 조리개 광학기(12)에 의해 상기 기준 대상(18)이 채널(14a-f)마다 이미지 영역(22a-e)으로 이미징되도록 배열됨 ―;
상기 복수 조리개 광학기(12)와 상기 이미지 센서(16) 사이의 상대적 위치를 변경하도록 제어 가능한 포지셔닝 디바이스(24);
상기 기준 대상(18)의 이미지들 내의 적어도 3개의 이미지 영역들(22a-e)에서 상기 기준 대상의 실제 위치들을 결정하고 상기 실제 위치들과 위치들의 비교에 기초하여 상기 포지셔닝 디바이스(24)를 제어하도록 구성된 계산 디바이스(26)를 포함하는,
복수 조리개 광학기(12)의 상대적 포지셔닝을 위한 디바이스(10). - 제 1 항에 있어서,
상기 계산 디바이스(26)는 다른 이미지 영역들(22a-e)에서의 실제 위치들에 대한 이미지 영역(22a-e)의 실제 위치의 비교에 기초하여 상기 포지셔닝 디바이스(24)를 제어하도록 구성되는,
복수 조리개 광학기(12)의 상대적 포지셔닝을 위한 디바이스(10). - 제 1 항 또는 제 2 항에 있어서,
상기 계산 디바이스(26)는 이미지 영역(22a-e)의 실제 위치와 상기 이미지 영역(22a-e)에 대한 타깃 위치의 비교에 기초하여 상기 포지셔닝 디바이스(24)를 제어하도록 구성되는,
복수 조리개 광학기(12)의 상대적 포지셔닝을 위한 디바이스(10). - 제 1 항 내지 제 3 항 중 어느 한 항에 있어서,
상기 계산 디바이스(26)는 고정 디바이스(28)를 제어하도록 구성되며,
상기 고정 디바이스는 상기 복수 조리개 광학기(12)와 상기 이미지 센서(16) 사이에 또는 상기 복수 조리개 광학기(12)와 상기 이미지 센서(16)가 배열되는 인쇄 회로 기판(36) 사이에 배열된 접착제(32)를 경화시키도록 구성되는,
복수 조리개 광학기(12)의 상대적 포지셔닝을 위한 디바이스(10). - 제 1 항 내지 제 4 항 중 어느 한 항에 있어서,
상기 기준 대상(18)은 상기 적어도 3개의 이미지 영역들(22a-c) 중 하나에 하나의 기준 마킹(35a-c)이 이미징되도록, 기준 마킹(35a-c)을 포함하는 적어도 3개의 기준 영역들(33a-c)을 포함하고,
상기 계산 디바이스(26)는 상기 이미지 영역에서 상기 기준 마킹들(38a-e)의 위치에 기초하여 상기 실제 위치를 결정하도록 구성되는,
복수 조리개 광학기(12)의 상대적 포지셔닝을 위한 디바이스(10). - 제 1 항 내지 제 5 항 중 어느 한 항에 있어서,
적어도 4개의 외측 이미지 영역들(22a-d) 및 하나의 내측 이미지 영역(22e)이 롤 축 및 피치 축을 따라 배열되고,
상기 외측 이미지 영역들(22a-c)은 상기 롤 축과 평행한 2개의 대향하는 쌍들로 그리고 상기 피치 축과 평행한 2개의 대향하는 쌍들로 배열되며,
상기 롤 축과 상기 피치 축은 서로 수직이 되도록 그리고 상기 이미지 센서의 표면 법선과 평행하게 배열된 요(yaw) 축에 수직이 되도록 배열되고,
상기 내측 이미지 영역들(22a)은 상기 롤 축, 상기 피치 축 및 상기 요 축의 교점(O)을 포함하며,
상기 계산 디바이스(26)는 상기 실제 위치들과 상기 위치의 비교에 기초하여, 상기 내측 이미지 영역(22e)에서 그리고 상기 적어도 4개의 외측 이미지 영역들(22a-d)에서 패턴(38)의 패턴 편차를 결정하도록 구성되는,
복수 조리개 광학기(12)의 상대적 포지셔닝을 위한 디바이스(10). - 제 6 항에 있어서,
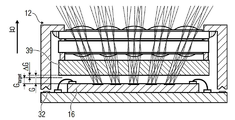
상기 계산 디바이스(26)는 상기 패턴 편차를 기초로 상기 내측 이미지 영역(22e)에 대한 실제 위치의 패턴 거리들의 거리(G)의 측정치를 결정하도록 구성되고,
상기 계산 디바이스(26)는 상기 거리(G)가 타깃 거리 값(Gtarget)에 도달하도록 상기 포지셔닝 디바이스(24)가 상기 요 축을 따라 상기 복수 조리개 광학기(12)를 시프트하게 상기 포지셔닝 디바이스(24)를 제어하도록 구성되는,
복수 조리개 광학기(12)의 상대적 포지셔닝을 위한 디바이스(10). - 제 6 항 또는 제 7 항에 있어서,
상기 계산 디바이스(26)는 상기 피치 축을 따라 상기 패턴 편차에 기초하여 상기 내측 이미지 영역(22e)에 대한 제 2 횡 방향 차이(ΔR)의 측정치를 결정하기 위해 상기 롤 축을 따라 상기 패턴 편차를 기초로 상기 내측 이미지 영역(22e)에 대한 실제 위치의 제 1 횡 방향 차이(ΔR)의 측정치를 결정하도록, 그리고 상기 제 1 횡 방향 차이(ΔR)가 제 1 횡 방향 차이 타깃 값(0)에 도달하고 상기 제 2 횡 방향 차이가 제 2 횡 방향 차이 타깃 값(0)에 도달하게 상기 포지셔닝 디바이스(24)를 제어하도록 구성되는,
복수 조리개 광학기(12)의 상대적 포지셔닝을 위한 디바이스(10). - 제 6 항 내지 제 8 항 중 어느 한 항에 있어서,
상기 계산 디바이스(26)는 상기 4개의 외측 이미지 영역들(22a-d) 각각에 대한 실제 위치의 패턴 거리들의 쐐기 에러 차이들(ΔtN)의 측정치를 결정하도록 그리고 상기 복수 조리개 광학기가 상기 롤 축 또는 상기 피치 축에 대해 기울어지게 상기 포지셔닝 디바이스(24)를 제어하여, 상기 쐐기 에러 차이들(ΔtN)이 타깃 롤 값(0) 또는 타깃 피치 값(0)에 도달하게 하도록 구성되는,
복수 조리개 광학기(12)의 상대적 포지셔닝을 위한 디바이스(10). - 제 6 항 내지 제 9 항 중 어느 한 항에 있어서,
상기 계산 디바이스(26)는 상기 타깃 롤 값(0) 및 상기 타깃 피치 값(0)이 순차적으로 차례로(910, 950) 도달하게 상기 포지셔닝 디바이스(24)를 제어하도록 구성되는,
복수 조리개 광학기(12)의 상대적 포지셔닝을 위한 디바이스(10). - 제 6 항 내지 제 10 항 중 어느 한 항에 있어서,
상기 계산 디바이스(26)는 제 1 국소(x) 및 제 2 국소(y) 횡 방향을 따라 각각, 상기 외측 이미지 영역들(22a-d) 각각에 대한 상기 패턴 편차의 회전 차(δ)의 측정치를 결정하도록, 그리고 상기 회전 차가 타깃 회전 값(0)에 도달하도록 상기 포지셔닝 디바이스(24)가 상기 요 축을 중심으로 상기 복수 조리개 광학기(12)를 회전시키게 상기 포지셔닝 디바이스(24)를 제어하도록 구성되는,
복수 조리개 광학기(12)의 상대적 포지셔닝을 위한 디바이스(10). - 제 6 항 내지 제 11 항 중 어느 한 항에 있어서,
상기 계산 디바이스(26)는 상기 롤 축에 평행한 국소 방향(x)을 따라 그리고 상기 피치 축에 평행한 로컬 방향(y)을 따라 상기 외측 이미지 영역들(22a-d) 각각에 대한 상기 패턴 편차의 거리들의 차(ΔG)의 측정치를 결정하도록, 그리고 거리 차들(ΔG)이 타깃 값(0)에 도달하도록 상기 포지셔닝 디바이스(24)가 상기 요 축을 따라 상기 복수 조리개 광학기(12)를 시프트하게 상기 포지셔닝 디바이스(24)를 제어하도록 구성되는,
복수 조리개 광학기(12)의 상대적 포지셔닝을 위한 디바이스(10). - 제 1 항 내지 제 12 항 중 어느 한 항에 있어서,
상기 계산 디바이스는,
상기 패턴 편차를 기초로 내측 이미지 영역(22e)에 대한 실제 위치의 패턴 거리들의 거리(G)의 측정치를 결정하고 ― 상기 계산 디바이스(26)는 상기 거리(G)가 타깃 거리 값(Gtarget)에 도달하도록 상기 포지셔닝 디바이스(24)가 상기 요 축을 따라 상기 복수 조리개 광학기(12)를 시프트하게 상기 포지셔닝 디바이스(24)를 제어하도록 구성됨 ―,
피치 축을 따라 상기 패턴 편차에 기초하여 상기 내측 이미지 영역에 대한 제 2 횡 방향 차이의 측정치를 결정하기 위해 롤 축을 따라 상기 패턴 편차를 기초로 상기 내측 이미지 영역(22e)에 대한 실제 위치의 제 1 횡 방향 차이(ΔR)의 측정치를 결정하고, 그리고 상기 제 1 횡 방향 차이(ΔR)가 제 1 횡 방향 차이 타깃 값(0)에 도달하고 상기 제 2 횡 방향 차이가 제 2 횡 방향 차이 타깃 값(0)에 도달하게 상기 포지셔닝 디바이스(24)를 제어하며,
상기 롤 축과 평행한 2개의 대향하는 쌍들로 그리고 상기 피치 축과 평행한 2개의 대향하는 쌍들로 배열된 4개의 외측 이미지 영역들(22a-d)에 대한 실제 위치의 패턴 거리들의 쐐기 에러 차이들(ΔtN)의 측정치를 결정하고, 그리고 상기 복수 조리개 광학기가 상기 롤 축 또는 상기 피치 축에 대해 기울어지게 상기 포지셔닝 디바이스(24)를 제어하여, 상기 쐐기 에러 차이들이 타깃 롤 값 또는 타깃 피치 값(0)에 도달하게 하며;
제 1 국소(x) 및 제 2 국소(y) 횡 방향을 따라 각각, 상기 4개의 외측 이미지 영역들(22a-d)에 대한 상기 패턴 편차의 회전 차(δ)의 측정치를 결정하고, 그리고 회전 차들(δ)이 타깃 회전 값(0)에 도달하도록 상기 포지셔닝 디바이스(24)가 요 축을 중심으로 상기 복수 조리개 광학기(12)를 회전시키게 상기 포지셔닝 디바이스(24)를 제어하며; 그리고
상기 롤 축에 평행한 국소 방향(x)을 따라 그리고 상기 피치 축에 평행한 로컬 방향(y)을 따라 상기 외측 이미지 영역들(22a-d) 각각에 대한 상기 패턴 편차의 거리들의 차(ΔG)의 측정치를 결정하고, 그리고 거리 차들(ΔG)이 타깃 값(0)에 도달하도록 상기 포지셔닝 디바이스(24)가 상기 요 축을 따라 상기 복수 조리개 광학기(12)를 시프트하게 상기 포지셔닝 디바이스(24)를 제어하도록 구성되는,
복수 조리개 광학기(12)의 상대적 포지셔닝을 위한 디바이스(10). - 제 13 항에 있어서,
상기 쐐기 에러 차들(ΔtN)이 상기 타깃 롤 값(0) 또는 상기 타깃 피치 값(0)에 도달하도록 상기 계산 디바이스(26)가 상기 포지셔닝 디바이스(24)를 제어하기 전에, 상기 회전 차들이 상기 타깃 회전 값(0)에 도달하기 전에, 또는 상기 거리 차들(ΔG)이 상기 타깃 값(0)에 도달하기 전에, 상기 계산 디바이스(26)는, 상기 거리(G)가 타깃 거리 값(ΔGtarget)에 도달하게, 상기 제 1 횡 방향 차이가 제 1 횡 방향 차이 타깃 값(0)에 도달하게, 그리고 상기 제 2 횡 방향 차이가 제 2 횡 방향 차이 타깃 값(0)에 도달하게, 각각의 경우에 상기 포지셔닝 디바이스(24)를 제어하도록 구성되는,
복수 조리개 광학기(12)의 상대적 포지셔닝을 위한 디바이스(10). - 이미지 센서(16)와 관련하여 여러 개의 광 채널들(14a-f)을 포함하는 복수 조리개 광학기(12)의 상대적 포지셔닝을 위한 방법으로서,
상기 광 채널들(14a-f)에서 상기 복수 조리개 광학기(12)에 의해 기준 대상(18)이 채널(14a-f)마다 이미지 영역(22a-e)으로 이미징되도록 상기 기준 대상(18)을 배열하는 단계(12a);
상기 복수 조리개 광학기(12)와 상기 이미지 센서(16) 사이의 상대적 위치를 변경하도록 제어 가능한 포지셔닝 디바이스(24)를 제공하는 단계;
상기 기준 대상(18)의 이미지들 내의 적어도 3개의 이미지 영역들(22a-d)에서 상기 기준 대상의 실제 위치들(814, 854; 914, 954; 1006, 1106)을 결정하는 단계;
상기 실제 위치들(824, 864; 926, 966; 1016, 1116)을 위치들과 비교하는 단계; 및
상기 비교를 기초로 포지셔닝 디바이스(822, 862; 922, 962; 1014; 1114)를 제어하는 단계를 포함하는,
복수 조리개 광학기(12)의 상대적 포지셔닝을 위한 방법.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102014212104.3A DE102014212104A1 (de) | 2014-06-24 | 2014-06-24 | Vorrichtung und verfahren zur relativen positionierung einer multiaperturoptik mit mehreren optischen kanälen relativ zu einem bildsensor |
| DE102014212104.3 | 2014-06-24 | ||
| PCT/EP2015/064284 WO2015197710A1 (de) | 2014-06-24 | 2015-06-24 | Vorrichtung und verfahren zur relativen positionierung einer multiaperturoptik mit mehreren optischen kanälen relativ zu einem bildsensor |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20170023103A true KR20170023103A (ko) | 2017-03-02 |
| KR101930040B1 KR101930040B1 (ko) | 2018-12-17 |
Family
ID=53719742
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020177001650A Expired - Fee Related KR101930040B1 (ko) | 2014-06-24 | 2015-06-24 | 이미지 센서와 관련된 다수의 광 채널들을 갖는 복수 조리개 광학 유닛을 포지셔닝하기 위한 디바이스 및 방법 |
Country Status (9)
| Country | Link |
|---|---|
| US (2) | US10362202B2 (ko) |
| EP (1) | EP3162045B1 (ko) |
| JP (2) | JP6701101B2 (ko) |
| KR (1) | KR101930040B1 (ko) |
| CN (1) | CN106716486B (ko) |
| DE (1) | DE102014212104A1 (ko) |
| ES (1) | ES2805072T3 (ko) |
| TW (1) | TWI605270B (ko) |
| WO (1) | WO2015197710A1 (ko) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20210012623A (ko) * | 2019-07-26 | 2021-02-03 | 팸텍주식회사 | 트리플 카메라모듈의 캘리브레이션 측정방법 |
| KR20210151474A (ko) * | 2020-06-05 | 2021-12-14 | 한국과학기술원 | 마이크로렌즈 어레이를 이용한 초박형 카메라 장치 그리고 이의 다기능 이미징 방법 |
| US12061121B2 (en) | 2018-10-02 | 2024-08-13 | Sony Semiconductor Solutions Corporation | Temperature detecting element and imaging apparatus |
Families Citing this family (39)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102016200285A1 (de) | 2016-01-13 | 2017-07-13 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. | Multiaperturabbildungsvorrichtung, Abbildungssystem und Verfahren zum Erfassen eines Objektbereichs |
| DE102016204148A1 (de) * | 2016-03-14 | 2017-09-14 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. | Multiaperturabbildungsvorrichtung, Abbildungssystem und Verfahren zum Erfassen eines Objektbereichs |
| DE102016208210A1 (de) | 2016-05-12 | 2017-11-16 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. | 3d-multiaperturabbildungsvorrichtungen, multiaperturabbildungsvorrichtung, verfahren zum bereitstellen eines ausgangssignals einer 3d-multiaperturabbildungsvorrichtung und verfahren zum erfassen eines gesamtgesichtsfeldes |
| TWI749030B (zh) * | 2017-06-27 | 2021-12-11 | 大陸商上海蔚蘭動力科技有限公司 | 駕駛輔助系統及駕駛輔助方法 |
| CN109141347A (zh) * | 2017-06-28 | 2019-01-04 | 京东方科技集团股份有限公司 | 车载摄像机测距方法及装置、存储介质和电子设备 |
| CN109212868B (zh) * | 2017-06-29 | 2021-03-09 | 致伸科技股份有限公司 | 多镜头相机模块及其制作方法 |
| DE102017211586A1 (de) * | 2017-07-06 | 2019-01-10 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. | Multiaperturabbildungsvorrichtung mit geringer falschlichtempfindlichkeit, abbildungssystem und verfahren zum bereitstellen einer multiaperturabbildungsvorrichtung |
| DE102017216172A1 (de) * | 2017-09-13 | 2019-03-14 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. | Multiaperturabbildungsvorrichtung mit geringer bauhöhe und umschaltbarer blickrichtung, abbildungssystem und verfahren zum bereitstellen einer multiaperturabbildungsvorrichtung |
| US10825152B2 (en) * | 2017-09-14 | 2020-11-03 | Canon U.S.A., Inc. | Distortion measurement and correction for spectrally encoded endoscopy |
| EP4116702B1 (en) | 2017-11-09 | 2024-01-03 | Rebellion Photonics, Inc. | Window obscuration sensors for mobile gas and chemical imaging cameras |
| US10347678B2 (en) | 2017-11-16 | 2019-07-09 | Visera Technologies Company Limited | Image sensor with shifted microlens array |
| US10916575B2 (en) | 2018-04-04 | 2021-02-09 | Samsung Electronics Co., Ltd. | Image sensor and method of manufacturing image sensor |
| JP6606234B1 (ja) * | 2018-07-13 | 2019-11-13 | Dmg森精機株式会社 | 測定装置 |
| US11030724B2 (en) | 2018-09-13 | 2021-06-08 | Samsung Electronics Co., Ltd. | Method and apparatus for restoring image |
| DE102018222865A1 (de) * | 2018-12-21 | 2020-06-25 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. | Vorrichtung mit einer Multiaperturabbildungsvorrichtung zur Erzeugung einer Tiefenkarte |
| DE102018222861A1 (de) * | 2018-12-21 | 2020-06-25 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. | Vorrichtung mit einer Multiaperturabbildungsvorrichtung zum Akkumulieren von Bildinformation |
| JP2020182139A (ja) * | 2019-04-26 | 2020-11-05 | ソニー株式会社 | 撮像システム及び撮像素子 |
| CN114270815B (zh) * | 2019-06-06 | 2025-03-18 | 弗劳恩霍夫应用研究促进协会 | 多通道成像设备和具有多孔径成像设备的设备 |
| TWI686773B (zh) * | 2019-07-30 | 2020-03-01 | 國立清華大學 | 機器視覺辨識功能於製程環境之修正方法 |
| JP7504688B2 (ja) * | 2019-07-31 | 2024-06-24 | キヤノン株式会社 | 画像処理装置、画像処理方法およびプログラム |
| WO2021020358A1 (ja) * | 2019-07-31 | 2021-02-04 | キヤノン株式会社 | 画像処理装置、画像処理方法、プログラムおよび記憶媒体 |
| AT522995B1 (de) * | 2019-10-07 | 2021-05-15 | Vexcel Imaging Gmbh | Sensoranordnung |
| KR102684228B1 (ko) | 2019-10-21 | 2024-07-11 | 삼성전자주식회사 | 복수-입력 폴디드 카메라 및 이를 포함하는 모바일 장치 |
| US12108181B2 (en) * | 2019-10-30 | 2024-10-01 | Sony Group Corporation | Imaging device, display device, and imaging system |
| KR102680385B1 (ko) | 2019-10-30 | 2024-07-02 | 삼성전자주식회사 | 멀티 렌즈 영상 복원 장치 및 방법 |
| KR102813299B1 (ko) | 2019-12-24 | 2025-05-28 | 삼성전자주식회사 | 이미지 장치 및 이미지 센싱 방법 |
| US11394955B2 (en) * | 2020-01-17 | 2022-07-19 | Aptiv Technologies Limited | Optics device for testing cameras useful on vehicles |
| TWI720869B (zh) * | 2020-04-15 | 2021-03-01 | 致伸科技股份有限公司 | 相機模組之對位方法 |
| US11595575B2 (en) | 2020-05-11 | 2023-02-28 | Samsung Electronics Co., Ltd. | Image sensor |
| KR102896028B1 (ko) | 2020-10-22 | 2025-12-04 | 삼성전자주식회사 | 이미징 장치 |
| CN112543270B (zh) * | 2020-12-03 | 2022-03-15 | 苏州天准科技股份有限公司 | 摄像头快速aa组装方法及装置 |
| KR20230037953A (ko) | 2021-09-10 | 2023-03-17 | 삼성전자주식회사 | 컬러 변환 방법 및 이를 수행하는 전자 장치와 이미지 센서 |
| TWI779842B (zh) * | 2021-09-22 | 2022-10-01 | 宏碁股份有限公司 | 立體顯示裝置及其顯示方法 |
| CN115866230B (zh) * | 2021-09-24 | 2025-03-28 | 宏碁股份有限公司 | 立体显示设备及其显示方法 |
| KR20230059493A (ko) | 2021-10-26 | 2023-05-03 | 삼성전자주식회사 | 특징 매칭 기반의 영상 합성을 통한 영상 처리 방법 및 장치 |
| CN114112066B (zh) * | 2021-11-26 | 2024-04-26 | 山东神戎电子股份有限公司 | 一种基于目标识别和空间学习的红外热像仪快速自动聚焦方法 |
| US12417650B2 (en) | 2022-05-25 | 2025-09-16 | Omnivision Technologies, Inc. | Multi-microlens fingerprint sensor with photodiodes in groups; each photodiode of the photodiode groups having a field of view through a microlens, pinholes of an upper black mask layer, and pinholes of a metal layer having pinhole rings with pinholes of an outer ring larger than those of an inner ring |
| US12106599B2 (en) | 2022-06-13 | 2024-10-01 | Omnivision Technologies, Inc. | Thin, multi-lens, optical fingerprint sensor adapted to image through cell phone displays and with multiple photodiode groups each having separate fields of view for each microlens |
| US20240007613A1 (en) * | 2022-06-30 | 2024-01-04 | Apple Inc. | Camera Rotation Correction |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009100260A (ja) * | 2007-10-17 | 2009-05-07 | Konica Minolta Opto Inc | カメラモジュール検査装置及びカメラモジュール検査方法 |
| JP2009238205A (ja) * | 2008-03-04 | 2009-10-15 | Ricoh Co Ltd | 個人認証装置及び電子機器 |
| JP2013120295A (ja) * | 2011-12-07 | 2013-06-17 | V Technology Co Ltd | マイクロレンズアレイの貼り合わせ装置 |
| JP2014106970A (ja) * | 2012-11-26 | 2014-06-09 | Ricoh Co Ltd | プレノプティック撮像システムおよび較正方法 |
Family Cites Families (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE4141226A1 (de) * | 1991-12-15 | 1993-06-17 | Wolf Henning | Montageverfahren und vorrichtung fuer die praezise positionierung von bauelementen und baugruppen |
| DE10139596C2 (de) * | 2001-08-11 | 2003-07-31 | Bosch Gmbh Robert | Verfahren und Vorrichtung zum Postitionieren eines Objekts an einem Ziel |
| AT412032B (de) | 2001-12-19 | 2004-08-26 | Riegl Laser Measurement Sys | Verfahren zur aufnahme eines objektraumes |
| WO2004057423A1 (de) * | 2002-12-19 | 2004-07-08 | Carl Zeiss Smt Ag | Messverfahren und messsystem zur vermessung der abbildungsqualität eines optischen abbildungssystems |
| EP1812968B1 (en) | 2004-08-25 | 2019-01-16 | Callahan Cellular L.L.C. | Apparatus for multiple camera devices and method of operating same |
| EP2357529A3 (en) * | 2005-06-02 | 2015-09-02 | Carl Zeiss SMT GmbH | Optical imaging arrangement |
| US20070102622A1 (en) * | 2005-07-01 | 2007-05-10 | Olsen Richard I | Apparatus for multiple camera devices and method of operating same |
| CN101310539B (zh) * | 2005-11-22 | 2010-10-27 | 松下电器产业株式会社 | 成像装置 |
| JP2007269879A (ja) | 2006-03-30 | 2007-10-18 | Kuraray Co Ltd | 導電性塗料およびそれをコーティングしてなる布帛 |
| JP2009092876A (ja) * | 2007-10-05 | 2009-04-30 | Funai Electric Co Ltd | 複眼撮像装置の製造方法、及び複眼撮像装置 |
| DE102009005092A1 (de) * | 2009-01-19 | 2010-09-02 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. | Vorrichtung zur optischen Navigation und dessen Verwendung |
| US8300108B2 (en) * | 2009-02-02 | 2012-10-30 | L-3 Communications Cincinnati Electronics Corporation | Multi-channel imaging devices comprising unit cells |
| DE102009049387B4 (de) | 2009-10-14 | 2016-05-25 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. | Vorrichtung, Bildverarbeitungsvorrichtung und Verfahren zur optischen Abbildung |
| JP2011133509A (ja) * | 2009-12-22 | 2011-07-07 | Shinko Electric Ind Co Ltd | カメラモジュールの組立方法 |
| JP2011150203A (ja) * | 2010-01-22 | 2011-08-04 | Sharp Corp | レンズバレルのフォーカス調整装置およびフォーカス調整方法 |
| JP5460406B2 (ja) * | 2010-03-24 | 2014-04-02 | 富士フイルム株式会社 | 撮像素子の位置調整方法、カメラモジュール製造方法及び装置、カメラモジュール |
| US8553131B2 (en) | 2010-06-03 | 2013-10-08 | Bendix Commercial Vehicle Systems Llc | Six-axis mount |
| DE102010031535A1 (de) * | 2010-07-19 | 2012-01-19 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. | Bildaufnahmevorrichtung und Verfahren zum Aufnehmen eines Bildes |
| JP2012049999A (ja) * | 2010-08-30 | 2012-03-08 | Nikon Corp | 撮像装置および姿勢調整プログラム |
| TWI480615B (zh) * | 2011-06-30 | 2015-04-11 | Lg Innotek Co Ltd | 鏡頭單元及其製造方法與具有其之攝影模組 |
| US9009952B2 (en) | 2011-08-29 | 2015-04-21 | Asm Technology Singapore Pte. Ltd. | Apparatus for assembling a lens module and an image sensor to form a camera module, and a method of assembling the same |
| WO2014023344A1 (de) * | 2012-08-07 | 2014-02-13 | Carl Zeiss Industrielle Messtechnik Gmbh | Verbesserter chromatischer sensor und verfahren |
| US20140043469A1 (en) | 2012-08-07 | 2014-02-13 | Carl Zeiss Industrielle Messtechnik Gmbh | Chromatic sensor and method |
| JP2014060621A (ja) * | 2012-09-18 | 2014-04-03 | Ricoh Co Ltd | 光学部品位置合わせ装置 |
| JPWO2014203676A1 (ja) * | 2013-06-17 | 2017-02-23 | コニカミノルタ株式会社 | 位置決め装置、位置決め方法及び複眼カメラモジュール |
-
2014
- 2014-06-24 DE DE102014212104.3A patent/DE102014212104A1/de not_active Ceased
-
2015
- 2015-06-24 ES ES15741502T patent/ES2805072T3/es active Active
- 2015-06-24 CN CN201580045247.8A patent/CN106716486B/zh active Active
- 2015-06-24 JP JP2016574972A patent/JP6701101B2/ja not_active Expired - Fee Related
- 2015-06-24 TW TW104120312A patent/TWI605270B/zh not_active IP Right Cessation
- 2015-06-24 WO PCT/EP2015/064284 patent/WO2015197710A1/de not_active Ceased
- 2015-06-24 EP EP15741502.7A patent/EP3162045B1/de active Active
- 2015-06-24 KR KR1020177001650A patent/KR101930040B1/ko not_active Expired - Fee Related
-
2016
- 2016-12-23 US US15/389,970 patent/US10362202B2/en active Active
-
2019
- 2019-03-20 JP JP2019052165A patent/JP6858211B2/ja not_active Expired - Fee Related
- 2019-07-08 US US16/504,830 patent/US10542196B2/en active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009100260A (ja) * | 2007-10-17 | 2009-05-07 | Konica Minolta Opto Inc | カメラモジュール検査装置及びカメラモジュール検査方法 |
| JP2009238205A (ja) * | 2008-03-04 | 2009-10-15 | Ricoh Co Ltd | 個人認証装置及び電子機器 |
| JP2013120295A (ja) * | 2011-12-07 | 2013-06-17 | V Technology Co Ltd | マイクロレンズアレイの貼り合わせ装置 |
| JP2014106970A (ja) * | 2012-11-26 | 2014-06-09 | Ricoh Co Ltd | プレノプティック撮像システムおよび較正方法 |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US12061121B2 (en) | 2018-10-02 | 2024-08-13 | Sony Semiconductor Solutions Corporation | Temperature detecting element and imaging apparatus |
| KR20210012623A (ko) * | 2019-07-26 | 2021-02-03 | 팸텍주식회사 | 트리플 카메라모듈의 캘리브레이션 측정방법 |
| KR20210151474A (ko) * | 2020-06-05 | 2021-12-14 | 한국과학기술원 | 마이크로렌즈 어레이를 이용한 초박형 카메라 장치 그리고 이의 다기능 이미징 방법 |
| US11818473B2 (en) | 2020-06-05 | 2023-11-14 | Korea Advanced Institute Of Science And Technology | Ultrathin camera device using microlens array, and multi-functional imaging method using the same |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2017520794A (ja) | 2017-07-27 |
| US20190335072A1 (en) | 2019-10-31 |
| JP6858211B2 (ja) | 2021-04-14 |
| US10542196B2 (en) | 2020-01-21 |
| DE102014212104A1 (de) | 2015-12-24 |
| EP3162045A1 (de) | 2017-05-03 |
| KR101930040B1 (ko) | 2018-12-17 |
| WO2015197710A1 (de) | 2015-12-30 |
| JP6701101B2 (ja) | 2020-05-27 |
| CN106716486A (zh) | 2017-05-24 |
| TW201606354A (zh) | 2016-02-16 |
| CN106716486B (zh) | 2020-12-08 |
| EP3162045B1 (de) | 2020-04-29 |
| US20170111558A1 (en) | 2017-04-20 |
| US10362202B2 (en) | 2019-07-23 |
| JP2019144559A (ja) | 2019-08-29 |
| ES2805072T3 (es) | 2021-02-10 |
| TWI605270B (zh) | 2017-11-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101930040B1 (ko) | 이미지 센서와 관련된 다수의 광 채널들을 갖는 복수 조리개 광학 유닛을 포지셔닝하기 위한 디바이스 및 방법 | |
| US8619144B1 (en) | Automatic camera calibration | |
| US8662676B1 (en) | Automatic projector calibration | |
| US9009952B2 (en) | Apparatus for assembling a lens module and an image sensor to form a camera module, and a method of assembling the same | |
| JP5198295B2 (ja) | 撮像素子の位置調整方法、カメラモジュール製造方法及び装置、カメラモジュール | |
| CN107014312B (zh) | 一种振镜式线激光扫描三维测量系统的整体标定方法 | |
| US20170132774A1 (en) | Apparatus And Method For Adjusting And / Or Calibrating A Multi-Camera Module As Well As The Use Of Such An Apparatus | |
| CN104364892B (zh) | 用于确定对准误差的装置和方法 | |
| CN114788259B (zh) | 测试图卡、相机制造装置、相机的制造方法以及计算机可读记录介质 | |
| CN112492192B (zh) | 一种相机及用于相机生产的方法 | |
| CN113091628A (zh) | 一种小尺寸轴孔间隙视觉测量标定装置及方法 | |
| US20150292867A1 (en) | Apparatus for detecting position of image pickup element | |
| TWI661240B (zh) | 透鏡元件搬送機構、控制器、光軸調整裝置、光學模組製造設備及其製造方法 | |
| US9366839B2 (en) | Position adjustment device and position adjustment method | |
| JP2011151551A (ja) | カメラモジュールの製造方法及び装置 | |
| JP2007040801A (ja) | 3次元座標測定装置及び方法 | |
| WO2013153645A1 (ja) | 撮像装置及び画像処理装置 | |
| US12547083B2 (en) | Use of alternating layer patterns approach for effective overlay metrology in multi-stack die applications | |
| JP2016540435A (ja) | デジタル顕微鏡用の移動装置を備えた撮像装置およびデジタル顕微鏡 | |
| Ishii et al. | Constant-magnification varifocal mirror and its application to measuring three-dimensional (3-D) shape of solder bump | |
| CN118511052A (zh) | 具有参考标记的并联运动学系统中的位姿确定 | |
| KR20250173884A (ko) | 카메라의 정렬방법 | |
| JP6072511B2 (ja) | 位置調整装置、および位置調整方法 | |
| JP2022034109A (ja) | 認識カメラ校正プレートおよび認識カメラ校正方法 | |
| KR20070016310A (ko) | 반도체 제조설비 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| PA0105 | International application |
St.27 status event code: A-0-1-A10-A15-nap-PA0105 |
|
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| D13-X000 | Search requested |
St.27 status event code: A-1-2-D10-D13-srh-X000 |
|
| D14-X000 | Search report completed |
St.27 status event code: A-1-2-D10-D14-srh-X000 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U12-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-5-5-R10-R18-oth-X000 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |
|
| PC1903 | Unpaid annual fee |
St.27 status event code: A-4-4-U10-U13-oth-PC1903 Not in force date: 20211212 Payment event data comment text: Termination Category : DEFAULT_OF_REGISTRATION_FEE |
|
| PC1903 | Unpaid annual fee |
St.27 status event code: N-4-6-H10-H13-oth-PC1903 Ip right cessation event data comment text: Termination Category : DEFAULT_OF_REGISTRATION_FEE Not in force date: 20211212 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |