KR20170035547A - 원격 제어장치, 원격 제어방법 및 원격 제어시스템 - Google Patents
원격 제어장치, 원격 제어방법 및 원격 제어시스템 Download PDFInfo
- Publication number
- KR20170035547A KR20170035547A KR1020150134523A KR20150134523A KR20170035547A KR 20170035547 A KR20170035547 A KR 20170035547A KR 1020150134523 A KR1020150134523 A KR 1020150134523A KR 20150134523 A KR20150134523 A KR 20150134523A KR 20170035547 A KR20170035547 A KR 20170035547A
- Authority
- KR
- South Korea
- Prior art keywords
- remote
- gesture
- remote control
- user
- motion
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images






















Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/011—Arrangements for interaction with the human body, e.g. for user immersion in virtual reality
-
- G—PHYSICS
- G04—HOROLOGY
- G04G—ELECTRONIC TIME-PIECES
- G04G21/00—Input or output devices integrated in time-pieces
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/0011—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots associated with a remote control arrangement
- G05D1/0038—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots associated with a remote control arrangement by providing the operator with simple or augmented images from one or more cameras located onboard the vehicle, e.g. tele-operation
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/017—Gesture based interaction, e.g. based on a set of recognized hand gestures
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/033—Pointing devices displaced or positioned by the user, e.g. mice, trackballs, pens or joysticks; Accessories therefor
- G06F3/0346—Pointing devices displaced or positioned by the user, e.g. mice, trackballs, pens or joysticks; Accessories therefor with detection of the device orientation or free movement in a three-dimensional [3D] space, e.g. 3D mice, 6-DOF [six degrees of freedom] pointers using gyroscopes, accelerometers or tilt-sensors
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N21/00—Selective content distribution, e.g. interactive television or video on demand [VOD]
- H04N21/40—Client devices specifically adapted for the reception of or interaction with content, e.g. set-top-box [STB]; Operations thereof
- H04N21/41—Structure of client; Structure of client peripherals
- H04N21/422—Input-only peripherals, i.e. input devices connected to specially adapted client devices, e.g. global positioning system [GPS]
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N21/00—Selective content distribution, e.g. interactive television or video on demand [VOD]
- H04N21/40—Client devices specifically adapted for the reception of or interaction with content, e.g. set-top-box [STB]; Operations thereof
- H04N21/41—Structure of client; Structure of client peripherals
- H04N21/422—Input-only peripherals, i.e. input devices connected to specially adapted client devices, e.g. global positioning system [GPS]
- H04N21/42204—User interfaces specially adapted for controlling a client device through a remote control device; Remote control devices therefor
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N21/00—Selective content distribution, e.g. interactive television or video on demand [VOD]
- H04N21/40—Client devices specifically adapted for the reception of or interaction with content, e.g. set-top-box [STB]; Operations thereof
- H04N21/47—End-user applications
- H04N21/472—End-user interface for requesting content, additional data or services; End-user interface for interacting with content, e.g. for content reservation or setting reminders, for requesting event notification, for manipulating displayed content
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Physics & Mathematics (AREA)
- Human Computer Interaction (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Remote Sensing (AREA)
- Radar, Positioning & Navigation (AREA)
- Automation & Control Theory (AREA)
- Aviation & Aerospace Engineering (AREA)
- Databases & Information Systems (AREA)
- User Interface Of Digital Computer (AREA)
Abstract
Description
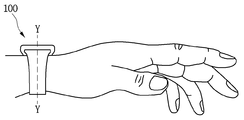
도 2는 본 발명의 실시예에 따른 웨어러블 디바이스의 사시도를 나타낸다.
도 3은 본 발명의 실시예에 따른 웨어러블 디바이스의 내부 블록도를 나타낸다.
도 4는 본 발명의 실시예에 따른 제스처 센서를 나타내기 위한 밴드 부분의 투시도를 나타낸다.
도 5는 본 발명의 실시예에 따른 제 1 제스처를 감지하는 방법을 설명하기 위한 도면들이다.
도 6은 본 발명의 실시예에 따른 제 2 제스처를 감지하는 방법을 설명하기 위한 도면들이다.
도 7은 본 발명의 실시예에 따른 모션 센서를 설명하기 위한 도면이다.
도 8은 본 발명의 실시예에 따른 디스플레이부의 화면을 나타낸다.
도 9는 본 발명의 실시예에 따른 원격 제어장치를 이용해 외부 기기를 원격 제어하는 과정을 설명하기 위한 흐름도이다.
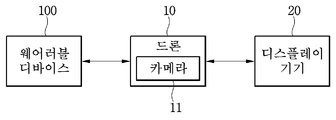
도 10은 본 발명의 실시예에 따른 원격 제어시스템의 일 례를 나타내는 블록도이다.
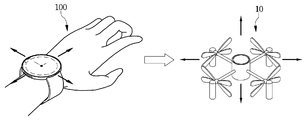
도 11은 본 발명의 실시예에 따른 제스처에 따른 원격 제어를 설명하기 위한 도면이다.
도 12는 본 발명의 실시예에 따른 제 2 모션에 따른 원격 제어를 설명하기 위한 도면이다.
도 13은 본 발명의 실시예에 따른 제 1 모션에 따른 원격 제어를 설명하기 위한 도면이다.
도 14는 본 발명의 다른 실시예에 따른 원격 제어를 설명하기 위한 도면이다.
도 15는 본 발명의 다른 실시예에 따른 원격 제어시스템의 일 례를 나타내는 블록도이다.
도 16은 본 발명의 다른 실시예에 따른 제 1 제어 모드에서 모션에 따른 원격 제어를 설명하기 위한 도면이다.
도 17은 본 발명의 다른 실시예에 따른 제 2 제어 모드에서 모션에 따른 원격 제어를 설명하기 위한 도면이다.
도 18은 본 발명의 또 다른 실시예에 따른 원격 제어시스템의 일 례를 나타내는 블록도이다.
도 19 내지 22는 본 발명의 또 다른 실시예에 따라 원격 제어를 수행하는 모습을 나타내는 도면들이다.
도 23은 본 발명의 또 다른 실시예에 따른 원격 제어시스템의 일 례를 나타내는 블록도이다.
도 24 내지 25는 본 발명의 또 다른 실시예에 따라 원격 제어를 수행하는 모습을 나타내는 도면들이다.
Claims (20)
- 사용자의 입력에 따라 원격으로 외부 기기를 제어하는 와치 타입 웨어러블 원격 제어장치로서,
상기 외부 기기를 제어하는 원격 실행 신호를 상기 외부 기기로 전송하는 무선 통신부;
상기 사용자의 제스처를 감지하는 제스처 센서;
상기 사용자의 모션을 감지하는 모션 센서; 및
상기 감지된 사용자의 제스처에 따라서 제 1 원격 실행 신호를 생성하고, 상기 감지된 모션에 따라 제 2 원격 실행 신호를 생성하는 제어부를 포함하는
원격 제어장치. - 제 1 항에 있어서,
상기 제스처는 상기 원격 제어장치를 착용한 상태에서 취한 유지 가능한 몸짓이고,
상기 제스처 센서는 적어도 2 이상의 제스처를 감지하는
원격 제어장치. - 제 1 항에 있어서,
상기 제스처 센서는,
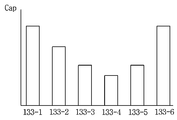
상기 사용자의 제스처에 따른 원격 제어장치와의 접촉 면적 변화를 정전용량 변화로 감지하는
원격 제어장치. - 제 1 항에 있어서,
상기 모션 센서는,
가속도 센서(acceleration sensor), 자이로스코프 센서(gyroscope sensor) 및 중력 센서(geomagnetic sensor) 중 적어도 둘 이상을 포함하여 적어도 둘 이상의 모듈로 각기 다른 모션을 감지하는
원격 제어장치. - 제 4 항에 있어서,
상기 가속도 센서는,
상기 사용자가 손목을 특정 방향으로 이동시키는 제 1 모션을 감지하고,
상기 자이로스코프 센서,
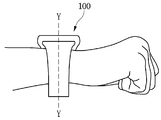
상기 사용자가 손목을 특정 방향으로 기울이는 제 2 모션을 감지하는
원격 제어장치. - 제 1 항에 있어서,
상기 제어부는 상기 감지된 사용자의 제스처에 따라서 제어 모드를 결정하고, 상기 결정된 제어 모드에서 상기 감지된 사용자의 모션에 따라 원격 실행 신호를 생성하는
원격 제어장치. - 제 6 항에 있어서,
상기 제어부는,
상기 제스처 센서에서 제 1 제스처를 감지하면 제 1 제어 모드에서, 제 2 제스처를 감지하면 제 2 제어 모드에서 상기 감지된 사용자의 모션에 따라 원격 실행 신호를 생성하는
원격 제어장치. - 제 7 항에 있어서,
상기 제어부는,
상기 제 1 제어 모드에서 제 1 모션 감지시 제 1 원격 실행 신호를 생성하고,
상기 제 2 제어 모드에서 제 1 모션 감지시 제 3 원격 실행 신호를 생성하고,
상기 제 1 원격 실행 신호와 상기 제 3 원격 실행 신호는 상기 외부 기기의 각기 다른 특성을 제어하는
원격 제어장치. - 제 8 항에 있어서,
상기 제 1 제어 모드에서 제 2 모션 감지시 제 2 원격 실행 신호를 생성하고,
상기 제 2 제어 모드에서 제 2 모션 감지시 제 4 원격 실행 신호를 생성하고,
상기 제 1 원격 실행 신호 내지 상기 제 4 원격 실행 신호는 상기 외부 기기의 각기 다른 특성을 제어하는
원격 제어장치. - 제 1 항에 있어서,
상기 외부 기기는 드론인
원격 제어장치. - 제 1 항에 있어서,
상기 제어부는,
제 1 제스처 감지시 상기 드론을 상승시키는 원격 실행 신호를 생성하고,
상기 제 2 제스처 감지시 상기 드론을 하강시키는 원격 실행 신호를 생성하는,
원격 제어장치. - 제 11 항에 있어서,
상기 제어부는,
제 1 모션 감지시 상기 드론의 기울기를 제어하는 원격 실행 신호를 생성하는
원격 제어장치. - 제 12 항에 있어서,
상기 제어부는,
제 2 모션 감지시 상기 드론의 가속 방향을 제어하는 원격 실행 신호를 생성하는
원격 제어장치. - 제 10 항에 있어서,
상기 제어부는,
제 1 제스처 감지시 상기 드론의 이동 특성을 제어하는 제 1 제어 모드를 제공하고,
제 2 제스처 감지시 상기 드론의 카메라를 제어하는 제 2 제어 모드를 제공하는
원격 제어장치. - 제 9 항에 있어서,
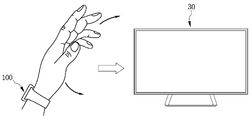
상기 외부 기기는 스마트 티비인
원격 제어장치. - 제 15 항에 있어서,
상기 제 1 제어 모드는 상기 스마트 티비의 채널을 제어하는 모드이고,
상기 제 2 제어 모드는 상기 스마트 티비의 음향을 제어하는 모드인
원격 제어장치. - 제 1 항에 있어서,
상기 무선 통신부는
블루투스 통신 방식으로 근접 거리에 위치한 상기 외부 기기에 직접 상기 원격 실행 신호를 전송하는 근거리 통신 모듈을 포함하는
원격 제어장치. - 제 1 항에 있어서,
상기 제스처 감지 상태 및 상기 모션 감지 상태를 출력하는 출력부를 더 포함하는
원격 제어장치. - 와치 타입 원격 제어장치를 이용하여 외부 기기를 원격 제어하는 방법으로서,
원격 제어를 시작하는 단계;
사용자의 제스처를 감지하는 단계;
상기 사용자의 제스처 상태에 따라서 제어 모드를 결정하는 단계;
상기 결정된 제어 모드에서 상기 사용자의 모션 입력을 감지하는 단계;
상기 결정된 제어 모드에서 상기 모션 입력에 따른 원격 실행신호를 생성하는 단계; 및
상기 원격 실행신호를 상기 외부 기기로 무선 전송하는 단계;를 포함하는
원격 제어방법. - 와치 타입 웨어러블 디바이스로 사용자의 제스처에 따라 제어 모드를 결정하고, 결정된 제어 모드에서 입력된 모션에 따라 원격 실행신호를 생성하고, 상기 원격 실행신호를 무선 전송하는 원격 제어장치; 및
상기 원격 제어 장치로부터 상기 원격 실행신호를 수신하고, 상기 수신된 원격 실행신호에 따라 제어되는 외부 기기를 포함하는
원격 제어시스템.
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020150134523A KR20170035547A (ko) | 2015-09-23 | 2015-09-23 | 원격 제어장치, 원격 제어방법 및 원격 제어시스템 |
| CN201690001180.8U CN208188782U (zh) | 2015-09-23 | 2016-08-18 | 远程控制设备、远程控制方法和远程控制系统 |
| PCT/KR2016/009095 WO2017052077A1 (ko) | 2015-09-23 | 2016-08-18 | 원격 제어장치, 원격 제어방법 및 원격 제어시스템 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020150134523A KR20170035547A (ko) | 2015-09-23 | 2015-09-23 | 원격 제어장치, 원격 제어방법 및 원격 제어시스템 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20170035547A true KR20170035547A (ko) | 2017-03-31 |
Family
ID=58386184
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020150134523A Ceased KR20170035547A (ko) | 2015-09-23 | 2015-09-23 | 원격 제어장치, 원격 제어방법 및 원격 제어시스템 |
Country Status (3)
| Country | Link |
|---|---|
| KR (1) | KR20170035547A (ko) |
| CN (1) | CN208188782U (ko) |
| WO (1) | WO2017052077A1 (ko) |
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101852851B1 (ko) * | 2017-11-10 | 2018-04-27 | (유)동아하이테크 | 드론 제어 장치 |
| KR101884125B1 (ko) * | 2017-06-13 | 2018-07-31 | 이승호 | 셀피용 촬영 시스템 및 이를 이용한 촬영 방법 |
| KR101887314B1 (ko) * | 2017-12-14 | 2018-08-09 | 세종대학교산학협력단 | 무인 항공기의 원격 제어 장치 및 방법과, 무인 항공기에 부착되는 움직임 제어 장치 |
| KR20190048565A (ko) * | 2017-10-31 | 2019-05-09 | 용비에이티(주) | 드론을 제어하는 방법 및 이를 위한 증강현실 관광 시스템 |
| KR20190076407A (ko) * | 2017-12-22 | 2019-07-02 | 세종대학교산학협력단 | 무인 항공기의 원격 제어 장치 및 방법 |
| KR20190098893A (ko) * | 2018-02-14 | 2019-08-23 | 동국대학교 산학협력단 | 드론의 제어 신호 생성 방법 및 제어 장치 |
| US10545495B2 (en) | 2017-12-14 | 2020-01-28 | Industry Academy Cooperation Foundation Of Sejong University | Remote control device and method for UAV and motion control device attached to UAV |
| WO2021046328A1 (en) * | 2019-09-06 | 2021-03-11 | Warner Bros. Entertainment Inc. | Gesture-centric user interface |
| KR102228151B1 (ko) * | 2019-10-29 | 2021-03-16 | 이승훈 | 스마트 스크린 원격 조작 장치 |
| KR20230070889A (ko) * | 2021-11-15 | 2023-05-23 | 국방과학연구소 | 컨트롤러 및 그의 동작 방법 |
| US11907431B2 (en) | 2019-09-06 | 2024-02-20 | Warner Bros. Entertainment Inc. | Gesture recognition device with minimal wand form factor |
Families Citing this family (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3195098B1 (en) | 2014-07-21 | 2024-10-23 | Apple Inc. | Remote user interface |
| US9547419B2 (en) | 2014-09-02 | 2017-01-17 | Apple Inc. | Reduced size configuration interface |
| GB2574886A (en) | 2018-06-22 | 2019-12-25 | Ecole Polytechnique Fed Lausanne Epfl | Teleoperation with a wearable sensor system |
| CN109521784B (zh) * | 2018-12-13 | 2021-05-11 | 华南农业大学 | 一种触觉感知式可穿戴上肢外骨骼无人机控制系统及方法 |
| CN110175059A (zh) * | 2019-04-16 | 2019-08-27 | 上海达龙信息科技有限公司 | 基于陀螺仪的远程桌面操控方法及系统、存储介质、服务器 |
| KR102393717B1 (ko) | 2019-05-06 | 2022-05-03 | 애플 인크. | 전자 디바이스의 제한된 동작 |
| DK201970533A1 (en) | 2019-05-31 | 2021-02-15 | Apple Inc | Methods and user interfaces for sharing audio |
| CN110515457A (zh) * | 2019-08-21 | 2019-11-29 | 辽宁科技大学 | 一种远程识别手势的装置及方法 |
| KR102842923B1 (ko) * | 2019-11-12 | 2025-08-07 | 현대자동차주식회사 | 후석 엔터테인먼트 시스템, 후석 엔터테인먼트 원격 제어 장치 및 그 방법 |
| JP1691390S (ja) | 2020-07-07 | 2021-08-02 | インタラクティブ デバイス | |
| CN111913580A (zh) * | 2020-08-12 | 2020-11-10 | 南京工业职业技术学院 | 一种基于红外光电的手势无人机控制器 |
| US12511021B2 (en) | 2020-09-14 | 2025-12-30 | Apple Inc. | Device management user interface |
| USD997754S1 (en) | 2021-02-10 | 2023-09-05 | Meta Platforms Technologies, Llc | Wearable device |
| USD1055050S1 (en) | 2021-04-29 | 2024-12-24 | Meta Platforms Technologies, Llc | Display screen with graphical user interface |
| USD1065212S1 (en) | 2021-05-03 | 2025-03-04 | Meta Platforms Technologies, Llc | Display device screen with graphical user interface |
| US12449907B2 (en) | 2021-05-19 | 2025-10-21 | Apple Inc. | Navigating user interfaces using a cursor |
| US12579758B2 (en) | 2022-02-08 | 2026-03-17 | Apple Inc. | Devices, methods, and graphical user interfaces for interacting with virtual objects using hand gestures |
| US12386428B2 (en) | 2022-05-17 | 2025-08-12 | Apple Inc. | User interfaces for device controls |
| US20240385691A1 (en) * | 2023-05-05 | 2024-11-21 | Apple Inc. | User interfaces for gesture detection |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101793566B1 (ko) * | 2013-08-23 | 2017-11-03 | 후아웨이 테크놀러지 컴퍼니 리미티드 | 원격 제어기, 정보 처리 방법 및 시스템 |
| KR20150029453A (ko) * | 2013-09-10 | 2015-03-18 | 엘지전자 주식회사 | 웨어러블 디바이스 및 이의 제어 방법 |
| US20150145653A1 (en) * | 2013-11-25 | 2015-05-28 | Invensense, Inc. | Device control using a wearable device |
| KR20150099324A (ko) * | 2014-02-21 | 2015-08-31 | 삼성전자주식회사 | 전자 장치간 원격 제어 방법 및 그를 위한 시스템 |
| KR20150063998A (ko) * | 2015-05-21 | 2015-06-10 | 엘지이노텍 주식회사 | 원격조종기능을 갖는 이동통신단말기 및 그 제어방법 |
-
2015
- 2015-09-23 KR KR1020150134523A patent/KR20170035547A/ko not_active Ceased
-
2016
- 2016-08-18 CN CN201690001180.8U patent/CN208188782U/zh not_active Expired - Fee Related
- 2016-08-18 WO PCT/KR2016/009095 patent/WO2017052077A1/ko not_active Ceased
Cited By (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101884125B1 (ko) * | 2017-06-13 | 2018-07-31 | 이승호 | 셀피용 촬영 시스템 및 이를 이용한 촬영 방법 |
| KR20190048565A (ko) * | 2017-10-31 | 2019-05-09 | 용비에이티(주) | 드론을 제어하는 방법 및 이를 위한 증강현실 관광 시스템 |
| KR101852851B1 (ko) * | 2017-11-10 | 2018-04-27 | (유)동아하이테크 | 드론 제어 장치 |
| KR101887314B1 (ko) * | 2017-12-14 | 2018-08-09 | 세종대학교산학협력단 | 무인 항공기의 원격 제어 장치 및 방법과, 무인 항공기에 부착되는 움직임 제어 장치 |
| US10545495B2 (en) | 2017-12-14 | 2020-01-28 | Industry Academy Cooperation Foundation Of Sejong University | Remote control device and method for UAV and motion control device attached to UAV |
| KR20190076407A (ko) * | 2017-12-22 | 2019-07-02 | 세종대학교산학협력단 | 무인 항공기의 원격 제어 장치 및 방법 |
| KR20190098893A (ko) * | 2018-02-14 | 2019-08-23 | 동국대학교 산학협력단 | 드론의 제어 신호 생성 방법 및 제어 장치 |
| US11907431B2 (en) | 2019-09-06 | 2024-02-20 | Warner Bros. Entertainment Inc. | Gesture recognition device with minimal wand form factor |
| GB2603392A (en) * | 2019-09-06 | 2022-08-03 | Warner Bros Entertainment Inc | Gesture-centric user interface |
| GB2603392B (en) * | 2019-09-06 | 2023-05-17 | Warner Bros Entertainment Inc | Gesture-centric user interface |
| WO2021046328A1 (en) * | 2019-09-06 | 2021-03-11 | Warner Bros. Entertainment Inc. | Gesture-centric user interface |
| US11914786B2 (en) | 2019-09-06 | 2024-02-27 | Warner Bros. Entertainment Inc. | Gesture recognition (GR) device with multiple light sources generating multiple lighting effects |
| US11972059B2 (en) | 2019-09-06 | 2024-04-30 | Warner Bros. Entertainment Inc. | Gesture-centric user interface |
| US12153739B2 (en) | 2019-09-06 | 2024-11-26 | Warner Bros. Entertainment Inc. | Gesture recognition device and method for sensing multi-factor assertion |
| US12299204B2 (en) | 2019-09-06 | 2025-05-13 | Warner Bros. Entertainment Inc. | Managing states of a gesture recognition device and an interactive casing |
| US12561008B2 (en) | 2019-09-06 | 2026-02-24 | Warner Bros. Entertainment Inc. | Gesture recognition device and method for sensing multi-factor assertion |
| KR102228151B1 (ko) * | 2019-10-29 | 2021-03-16 | 이승훈 | 스마트 스크린 원격 조작 장치 |
| KR20230070889A (ko) * | 2021-11-15 | 2023-05-23 | 국방과학연구소 | 컨트롤러 및 그의 동작 방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN208188782U (zh) | 2018-12-04 |
| WO2017052077A1 (ko) | 2017-03-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20170035547A (ko) | 원격 제어장치, 원격 제어방법 및 원격 제어시스템 | |
| CN112424730B (zh) | 具有手指设备的计算机系统 | |
| EP3485355B1 (en) | Finger-mounted device with sensors and haptics | |
| KR101541082B1 (ko) | 손 재활 운동 시스템 및 방법 | |
| US10139906B1 (en) | Ring human-machine interface | |
| KR102212030B1 (ko) | 글래스 타입 단말기 및 이의 제어방법 | |
| JP5969626B2 (ja) | 高められたジェスチャ・ベースの対話のためのシステム及び方法 | |
| US10055064B2 (en) | Controlling multiple devices with a wearable input device | |
| US20220233142A1 (en) | Wearable device and method of generating signal for controlling operation of electronic device | |
| US10168775B2 (en) | Wearable motion sensing computing interface | |
| US10120444B2 (en) | Wearable device | |
| JP5974928B2 (ja) | 表示制御装置、表示装置、表示制御方法、およびプログラム | |
| EP3037946A1 (en) | Remote controller, information processing method and system | |
| US20150185852A1 (en) | Ring mobile device and operation method of the same | |
| JP2010108500A (ja) | 着用型コンピューティング環境基盤のユーザインターフェース装置およびその方法 | |
| KR102677050B1 (ko) | 전자 장치 및 그 제어 방법 | |
| US20120068925A1 (en) | System and method for gesture based control | |
| KR20150088599A (ko) | 이동 단말기 및 이의 제어방법 | |
| KR20160035948A (ko) | 이동 단말기와 그것을 포함하는 시스템 | |
| JP6483556B2 (ja) | 操作認識装置、操作認識方法及びプログラム | |
| JP2015121979A (ja) | 装着型情報入力装置、情報入力システム、及び情報入力方法 | |
| EP3309659A1 (en) | Systems and methods for providing electrostatic haptic effects via a wearable or handheld device | |
| KR20160096902A (ko) | 밴드형 센서 및 이를 포함하는 웨어러블 디바이스 | |
| JP6536881B2 (ja) | 表示装置及び情報表示方法、情報表示プログラム | |
| WO2015153690A1 (en) | Wearable motion sensing computing interface |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
St.27 status event code: A-0-1-A10-A12-nap-PA0109 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-3-3-R10-R18-oth-X000 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| R17-X000 | Change to representative recorded |
St.27 status event code: A-3-3-R10-R17-oth-X000 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-2-2-P10-P22-nap-X000 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-3-3-R10-R18-oth-X000 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-3-3-R10-R18-oth-X000 |
|
| A201 | Request for examination | ||
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-3-3-R10-R13-asn-PN2301 St.27 status event code: A-3-3-R10-R11-asn-PN2301 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| E601 | Decision to refuse application | ||
| PE0601 | Decision on rejection of patent |
St.27 status event code: N-2-6-B10-B15-exm-PE0601 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-2-2-P10-P22-nap-X000 |