KR20170044019A - 자동-교정 이미지 재구성을 위한 공동 궤적 및 병렬 자기 공명 이미징 최적화를 위한 시스템들 및 방법들 - Google Patents
자동-교정 이미지 재구성을 위한 공동 궤적 및 병렬 자기 공명 이미징 최적화를 위한 시스템들 및 방법들 Download PDFInfo
- Publication number
- KR20170044019A KR20170044019A KR1020160127638A KR20160127638A KR20170044019A KR 20170044019 A KR20170044019 A KR 20170044019A KR 1020160127638 A KR1020160127638 A KR 1020160127638A KR 20160127638 A KR20160127638 A KR 20160127638A KR 20170044019 A KR20170044019 A KR 20170044019A
- Authority
- KR
- South Korea
- Prior art keywords
- image
- reconstructing
- space trajectory
- data
- space
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images



Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/05—Detecting, measuring or recording for diagnosis by means of electric currents or magnetic fields; Measuring using microwaves or radio waves
- A61B5/055—Detecting, measuring or recording for diagnosis by means of electric currents or magnetic fields; Measuring using microwaves or radio waves involving electronic [EMR] or nuclear [NMR] magnetic resonance, e.g. magnetic resonance imaging
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/44—Arrangements or instruments for measuring magnetic variables involving magnetic resonance using nuclear magnetic resonance [NMR]
- G01R33/48—NMR imaging systems
- G01R33/58—Calibration of imaging systems, e.g. using test probes, Phantoms; Calibration objects or fiducial markers such as active or passive RF coils surrounding an MR active material
- G01R33/583—Calibration of signal excitation or detection systems, e.g. for optimal RF excitation power or frequency
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/44—Arrangements or instruments for measuring magnetic variables involving magnetic resonance using nuclear magnetic resonance [NMR]
- G01R33/48—NMR imaging systems
- G01R33/4818—MR characterised by data acquisition along a specific k-space trajectory or by the temporal order of k-space coverage, e.g. centric or segmented coverage of k-space
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/44—Arrangements or instruments for measuring magnetic variables involving magnetic resonance using nuclear magnetic resonance [NMR]
- G01R33/48—NMR imaging systems
- G01R33/4818—MR characterised by data acquisition along a specific k-space trajectory or by the temporal order of k-space coverage, e.g. centric or segmented coverage of k-space
- G01R33/4824—MR characterised by data acquisition along a specific k-space trajectory or by the temporal order of k-space coverage, e.g. centric or segmented coverage of k-space using a non-Cartesian trajectory
- G01R33/4826—MR characterised by data acquisition along a specific k-space trajectory or by the temporal order of k-space coverage, e.g. centric or segmented coverage of k-space using a non-Cartesian trajectory in three dimensions
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/44—Arrangements or instruments for measuring magnetic variables involving magnetic resonance using nuclear magnetic resonance [NMR]
- G01R33/48—NMR imaging systems
- G01R33/54—Signal processing systems, e.g. using pulse sequences ; Generation or control of pulse sequences; Operator console
- G01R33/56—Image enhancement or correction, e.g. subtraction or averaging techniques, e.g. improvement of signal-to-noise ratio and resolution
- G01R33/565—Correction of image distortions, e.g. due to magnetic field inhomogeneities
- G01R33/56518—Correction of image distortions, e.g. due to magnetic field inhomogeneities due to eddy currents, e.g. caused by switching of the gradient magnetic field
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/44—Arrangements or instruments for measuring magnetic variables involving magnetic resonance using nuclear magnetic resonance [NMR]
- G01R33/48—NMR imaging systems
- G01R33/54—Signal processing systems, e.g. using pulse sequences ; Generation or control of pulse sequences; Operator console
- G01R33/56—Image enhancement or correction, e.g. subtraction or averaging techniques, e.g. improvement of signal-to-noise ratio and resolution
- G01R33/565—Correction of image distortions, e.g. due to magnetic field inhomogeneities
- G01R33/56572—Correction of image distortions, e.g. due to magnetic field inhomogeneities caused by a distortion of a gradient magnetic field, e.g. non-linearity of a gradient magnetic field
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/44—Arrangements or instruments for measuring magnetic variables involving magnetic resonance using nuclear magnetic resonance [NMR]
- G01R33/48—NMR imaging systems
- G01R33/54—Signal processing systems, e.g. using pulse sequences ; Generation or control of pulse sequences; Operator console
- G01R33/56—Image enhancement or correction, e.g. subtraction or averaging techniques, e.g. improvement of signal-to-noise ratio and resolution
- G01R33/567—Image enhancement or correction, e.g. subtraction or averaging techniques, e.g. improvement of signal-to-noise ratio and resolution gated by physiological signals, i.e. synchronization of acquired MR data with periodical motion of an object of interest, e.g. monitoring or triggering system for cardiac or respiratory gating
- G01R33/5673—Gating or triggering based on a physiological signal other than an MR signal, e.g. ECG gating or motion monitoring using optical systems for monitoring the motion of a fiducial marker
-
- G06T3/0093—
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T3/00—Geometric image transformations in the plane of the image
- G06T3/18—Image warping, e.g. rearranging pixels individually
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T3/00—Geometric image transformations in the plane of the image
- G06T3/40—Scaling of whole images or parts thereof, e.g. expanding or contracting
- G06T3/4007—Scaling of whole images or parts thereof, e.g. expanding or contracting based on interpolation, e.g. bilinear interpolation
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/44—Arrangements or instruments for measuring magnetic variables involving magnetic resonance using nuclear magnetic resonance [NMR]
- G01R33/48—NMR imaging systems
- G01R33/4818—MR characterised by data acquisition along a specific k-space trajectory or by the temporal order of k-space coverage, e.g. centric or segmented coverage of k-space
- G01R33/4824—MR characterised by data acquisition along a specific k-space trajectory or by the temporal order of k-space coverage, e.g. centric or segmented coverage of k-space using a non-Cartesian trajectory
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/44—Arrangements or instruments for measuring magnetic variables involving magnetic resonance using nuclear magnetic resonance [NMR]
- G01R33/48—NMR imaging systems
- G01R33/54—Signal processing systems, e.g. using pulse sequences ; Generation or control of pulse sequences; Operator console
- G01R33/56—Image enhancement or correction, e.g. subtraction or averaging techniques, e.g. improvement of signal-to-noise ratio and resolution
- G01R33/561—Image enhancement or correction, e.g. subtraction or averaging techniques, e.g. improvement of signal-to-noise ratio and resolution by reduction of the scanning time, i.e. fast acquiring systems, e.g. using echo-planar pulse sequences
- G01R33/5611—Parallel magnetic resonance imaging, e.g. sensitivity encoding [SENSE], simultaneous acquisition of spatial harmonics [SMASH], unaliasing by Fourier encoding of the overlaps using the temporal dimension [UNFOLD], k-t-broad-use linear acquisition speed-up technique [k-t-BLAST], k-t-SENSE
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/44—Arrangements or instruments for measuring magnetic variables involving magnetic resonance using nuclear magnetic resonance [NMR]
- G01R33/48—NMR imaging systems
- G01R33/54—Signal processing systems, e.g. using pulse sequences ; Generation or control of pulse sequences; Operator console
- G01R33/56—Image enhancement or correction, e.g. subtraction or averaging techniques, e.g. improvement of signal-to-noise ratio and resolution
- G01R33/561—Image enhancement or correction, e.g. subtraction or averaging techniques, e.g. improvement of signal-to-noise ratio and resolution by reduction of the scanning time, i.e. fast acquiring systems, e.g. using echo-planar pulse sequences
- G01R33/5615—Echo train techniques involving acquiring plural, differently encoded, echo signals after one RF excitation, e.g. using gradient refocusing in echo planar imaging [EPI], RF refocusing in rapid acquisition with relaxation enhancement [RARE] or using both RF and gradient refocusing in gradient and spin echo imaging [GRASE]
- G01R33/5616—Echo train techniques involving acquiring plural, differently encoded, echo signals after one RF excitation, e.g. using gradient refocusing in echo planar imaging [EPI], RF refocusing in rapid acquisition with relaxation enhancement [RARE] or using both RF and gradient refocusing in gradient and spin echo imaging [GRASE] using gradient refocusing, e.g. EPI
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/44—Arrangements or instruments for measuring magnetic variables involving magnetic resonance using nuclear magnetic resonance [NMR]
- G01R33/48—NMR imaging systems
- G01R33/54—Signal processing systems, e.g. using pulse sequences ; Generation or control of pulse sequences; Operator console
- G01R33/56—Image enhancement or correction, e.g. subtraction or averaging techniques, e.g. improvement of signal-to-noise ratio and resolution
- G01R33/565—Correction of image distortions, e.g. due to magnetic field inhomogeneities
- G01R33/56545—Correction of image distortions, e.g. due to magnetic field inhomogeneities caused by finite or discrete sampling, e.g. Gibbs ringing, truncation artefacts, phase aliasing artefacts
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10072—Tomographic images
- G06T2207/10088—Magnetic resonance imaging [MRI]
Landscapes
- Physics & Mathematics (AREA)
- Health & Medical Sciences (AREA)
- General Physics & Mathematics (AREA)
- High Energy & Nuclear Physics (AREA)
- Engineering & Computer Science (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Life Sciences & Earth Sciences (AREA)
- Radiology & Medical Imaging (AREA)
- General Health & Medical Sciences (AREA)
- Signal Processing (AREA)
- Biophysics (AREA)
- Physiology (AREA)
- Theoretical Computer Science (AREA)
- Pathology (AREA)
- Heart & Thoracic Surgery (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Surgery (AREA)
- Molecular Biology (AREA)
- Medical Informatics (AREA)
- Animal Behavior & Ethology (AREA)
- Biomedical Technology (AREA)
- Cardiology (AREA)
- Power Engineering (AREA)
- Pulmonology (AREA)
- Nonlinear Science (AREA)
- Magnetic Resonance Imaging Apparatus (AREA)
Abstract
Description
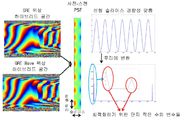
[0009] 도 2는 Wave-CAIPI 방법(좌측)에서 사인파 기울기들의 사용을 통해 생성된 위상을 설명하기 위하여 "PSF"(point spread function)의 사용을 예시한다. 사전-스캔을 통해 결정된 PSF는 통상적으로 슬라이스(또는 위상 인코드) 포지션들(우측)에 대응하는 선형 경향성(linear trend)에 대해 맞추어진다. 정확하게 결정될 필요가 있는 작은 수의 파라미터들(푸리에 기반 항(Fourier basis term)들의 스케일링(scaling))이 도시된다.
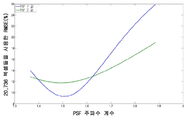
[0010] 도 3은 Wave-CAIPI PSF를 설명하기 위하여 사용된 푸리에 계수들이 조작될 때 제한된 수의 복셀들에 걸쳐 PMSE의 변화를 예시하는 플롯(plot)이다.
[0011] 도 4는 등각점(좌측, 중간)에서 전체 사전-스캔 방법을 사용하는 것과 최적화된 PSF를 사용하는 것의 팬텀(phantom) 재구성 비교를 묘사한다. 최적화된 PSF 및 임상적으로 관련된 FOV 병진들 및 회전들을 활용한 건강한 지원자로부터의 생체내 이미지들은 우측 패널에 묘사된다.




Claims (12)
- MRI(magnetic resonance imaging) 시스템으로 포착된 데이터를 샘플링하기 위하여 사용된 실제 k-공간 궤적을 공동으로 추정하면서 상기 데이터로부터 이미지를 재구성하기 위한 방법으로서,
(a) 설계된 k-공간 궤적을 구현하는 펄스 시퀀스를 사용함으로써 MRI 시스템으로 포착된 데이터를 컴퓨터 시스템에 제공하는 단계;
(b) 공동으로 상기 이미지를 재구성하고 단계(a)에서 제공된 데이터를 포착할 때 샘플링된 실제 k-공간 궤적을 추정하는 목적 함수를 최적화하기 위하여 상기 컴퓨터 시스템을 사용함으로써 단계(a)에서 제공된 상기 데이터로부터 이미지를 재구성하는 단계 ― 상기 목적 함수는 상기 실제 k-공간 궤적과 상기 설계된 k-공간 궤적 사이의 편차들을 설명하는 적어도 하나의 항을 포함함 ―
를 포함하는,
이미지를 재구성하기 위한 방법. - 제 1 항에 있어서,
상기 목적 함수는 조절 파라미터들에 기초하여 상기 실제 k-공간 궤적과 상기 설계된 k-공간 궤적 사이의 편차들을 모델링하는,
이미지를 재구성하기 위한 방법. - 제 2 항에 있어서,
상기 목적 함수를 최적화하는 것은 상기 조절 파라미터들 및 상기 이미지에 대한 감소된 모델을 형성하는 것을 포함하는,
이미지를 재구성하기 위한 방법. - 제 3 항에 있어서,
상기 이미지에 대한 감소된 모델은 상기 이미지를 재구성하는 동안 상기 이미지의 복셀들의 서브세트에 걸쳐 재구성 품질을 평가하는 것을 포함하는,
이미지를 재구성하기 위한 방법. - 제 3 항에 있어서,
상기 조절 파라미터들에 대한 감소된 모델은 단계(a)에서 제공된 데이터를 포착할 때 샘플링된 실제 k-공간 궤적을 추정하면서 평가될 조절 파라미터들의 수를 감소시키는 것을 포함하는,
이미지를 재구성하기 위한 방법. - 제 2 항에 있어서,
상기 설계된 k-공간 궤적은 EPI(echo-planar imaging) 궤적이고 상기 조절 파라미터들은 위상 오프셋들을 포함하는,
이미지를 재구성하기 위한 방법. - 제 4 항에 있어서,
상기 위상 오프셋들은 상기 EPI 궤적의 짝수 k-공간 라인과 홀수 k-공간 라인 사이에서 결정된 위상 오프셋들인,
이미지를 재구성하기 위한 방법. - 제 2 항에 있어서,
상기 설계된 k-공간 궤적은 나선형 궤적이고 상기 조절 파라미터들은 다항식 계수들을 포함하는,
이미지를 재구성하기 위한 방법. - 제 2 항에 있어서,
상기 조절 파라미터들은 푸리에 계수들을 포함하는,
이미지를 재구성하기 위한 방법. - 제 1 항에 있어서,
상기 목적 함수는이고, 여기서 F(t)는 조절 파라미터들(t)의 함수인 k-공간에 대한 맵핑을 사용하여 상기 실제 k-공간 궤적을 설명하는 함수이고; C i 는 N개의 라디오 주파수("RF") 수신 코일들의 어레이 내 i 번째 수신 채널이고; x는 재구성될 이미지이고; 그리고 k i 는 i 번째 수신 채널에 의해 포착된 데이터인,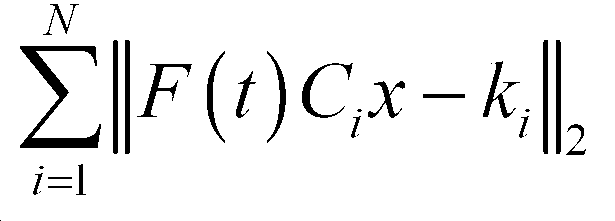
이미지를 재구성하기 위한 방법. - 제 10 항에 있어서,
상기 목적 함수를 최적화하는 것은 상기 조절 파라미터들(t) 및 상기 이미지(x)에 대한 감소된 모델을 형성하는 것을 포함하는,
이미지를 재구성하기 위한 방법. - 제 1 항에 있어서,
단계(a)는 입력으로서 상기 설계된 k-공간 궤적을 사용하여 상기 MRI 시스템으로 상기 데이터를 포착하는 단계를 포함하는,
이미지를 재구성하기 위한 방법.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201562235738P | 2015-10-01 | 2015-10-01 | |
| US62/235,738 | 2015-10-01 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20170044019A true KR20170044019A (ko) | 2017-04-24 |
| KR102657483B1 KR102657483B1 (ko) | 2024-04-12 |
Family
ID=57083032
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020160127638A Active KR102657483B1 (ko) | 2015-10-01 | 2016-10-04 | 자동-교정 이미지 재구성을 위한 공동 궤적 및 병렬 자기 공명 이미징 최적화를 위한 시스템들 및 방법들 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US10408910B2 (ko) |
| EP (1) | EP3151027B1 (ko) |
| KR (1) | KR102657483B1 (ko) |
| CN (1) | CN107049316B (ko) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20200004079A (ko) * | 2018-07-03 | 2020-01-13 | 가천대학교 산학협력단 | 자기공명 영상장치의 기계 학습 기반의 경사자계 오차 보정 시스템 및 방법 |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10557908B2 (en) * | 2017-04-06 | 2020-02-11 | University Of Virginia Patent Foundation | Magnetic field monitoring of spiral echo train imaging |
| CN110133555B (zh) * | 2018-02-08 | 2021-11-05 | 深圳先进技术研究院 | 一种Wave-CAIPI磁共振成像参数的解析优化方法、装置及介质 |
| DE102020205667B4 (de) * | 2020-05-05 | 2025-07-24 | Siemens Healthineers Ag | Rekonstruktion von mr-bildern mittels wave-caipi |
| US11486954B2 (en) * | 2020-08-24 | 2022-11-01 | Siemens Healthcare Gmbh | Systems and methods for extending reconstructions to non-uniform k-space sampling |
| US12108993B2 (en) | 2021-08-05 | 2024-10-08 | GE Precision Healthcare LLC | Methods and system for guided device insertion during medical imaging |
| JP7623260B2 (ja) * | 2021-09-24 | 2025-01-28 | 富士フイルム株式会社 | 磁気共鳴イメージング装置、および、画像処理方法 |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20130099784A1 (en) * | 2011-04-22 | 2013-04-25 | Kawin Setsompop | Method for Magnetic Resonance Imaging with Controlled Aliasing |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2644831B2 (ja) * | 1988-07-06 | 1997-08-25 | 株式会社日立製作所 | Nmrイメージングにおける画像再構成方法 |
| JP3643174B2 (ja) * | 1996-05-09 | 2005-04-27 | ジーイー横河メディカルシステム株式会社 | Mri装置 |
| US6411089B1 (en) * | 2000-11-22 | 2002-06-25 | Philips Medical Systems (Cleveland), Inc. | Two-dimensional phase-conjugate symmetry reconstruction for 3d spin-warp, echo-planar and echo-volume magnetic resonance imaging |
| US20040064033A1 (en) * | 2002-05-14 | 2004-04-01 | Brian Dale | System and method for reconstructing k-space data |
| US7888935B1 (en) * | 2007-02-23 | 2011-02-15 | University Of Virginia Patent Foundation | K-space trajectory estimation in spiral MRI system and related method thereof |
| US7791338B2 (en) * | 2007-09-07 | 2010-09-07 | The Board Of Trustees Of The Leland Stanford Junior University | MRI method of determining time-optimal gradient waveforms with gradient amplitude as a function of arc-length in k-space |
| US8154289B2 (en) | 2008-04-11 | 2012-04-10 | The General Hospital Corporation | Method for joint sparsity-enforced k-space trajectory and radiofrequency pulse design |
| CN102264291B (zh) * | 2008-12-26 | 2013-10-23 | 株式会社日立医疗器械 | 磁共振成像装置及读出梯度磁场误差修正方法 |
| EP2372383B1 (en) * | 2010-03-24 | 2015-12-16 | Bruker BioSpin MRI GmbH | Design of a gradient waveform for a k-space trajectory with an upper frequency limit due to MRI gradient hardware |
| WO2013033558A1 (en) | 2011-09-01 | 2013-03-07 | The General Hospital Corporation | System and method for joint degradation estimation and image reconstruction in magnetic resonance imaging |
| US9417306B2 (en) * | 2012-04-12 | 2016-08-16 | Case Western Reserve University | Magnetic resonance trajectory correcting with GRAPPA operator gridding |
| DE102013221347B4 (de) | 2013-10-21 | 2015-04-30 | Siemens Aktiengesellschaft | Ermittlung einer Magnetresonanz-Pulssequenz unter Verwendung einer Kombination von verschiedenen Trajektorienverlaufs-Funktionen unter Berücksichtigung eines Trajektorien-Fehlermodells |
-
2016
- 2016-09-30 US US15/281,457 patent/US10408910B2/en active Active
- 2016-10-04 EP EP16002132.5A patent/EP3151027B1/en active Active
- 2016-10-04 KR KR1020160127638A patent/KR102657483B1/ko active Active
- 2016-10-09 CN CN201611272479.XA patent/CN107049316B/zh active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20130099784A1 (en) * | 2011-04-22 | 2013-04-25 | Kawin Setsompop | Method for Magnetic Resonance Imaging with Controlled Aliasing |
| US8981776B2 (en) * | 2011-04-22 | 2015-03-17 | The General Hospital Corporation | Method for magnetic resonance imaging with controlled aliasing |
Non-Patent Citations (1)
| Title |
|---|
| Ianni J D, Grissom W A, Trajectory Auto-Corrected Image Reconstruction. Magnetic Resonance in Medicine. 76, pp.757~768 (2015.09.12.)* * |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20200004079A (ko) * | 2018-07-03 | 2020-01-13 | 가천대학교 산학협력단 | 자기공명 영상장치의 기계 학습 기반의 경사자계 오차 보정 시스템 및 방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN107049316B (zh) | 2021-12-21 |
| US20170097403A1 (en) | 2017-04-06 |
| EP3151027A2 (en) | 2017-04-05 |
| US10408910B2 (en) | 2019-09-10 |
| EP3151027A3 (en) | 2017-06-07 |
| EP3151027B1 (en) | 2023-07-26 |
| KR102657483B1 (ko) | 2024-04-12 |
| CN107049316A (zh) | 2017-08-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102657483B1 (ko) | 자동-교정 이미지 재구성을 위한 공동 궤적 및 병렬 자기 공명 이미징 최적화를 위한 시스템들 및 방법들 | |
| JP6553087B2 (ja) | 磁気共鳴撮像のための統合された画像再構成および勾配非線形性補正 | |
| US9933505B2 (en) | System and method for motion correction in magnetic resonance imaging | |
| WO2016070167A1 (en) | Sparse reconstruction strategy for multi-level sampled mri | |
| WO2015175028A1 (en) | Systems and methods for acceleration magnetic resonance fingerprinting | |
| WO2013169368A1 (en) | System and method for local sar reduction in multislice parallel transmission magnetic resonance imaging using sar hopping between excitations | |
| EP3100067A1 (en) | Simltaneous multisl1ce mri with random gradient encoding | |
| US20170336488A1 (en) | System and method for convolution operations for data estimation from covariance in magnetic resonance imaging | |
| WO2020219642A1 (en) | Model-based iterative reconstruction for magnetic resonance imaging with echo planar readout | |
| JP2018520730A (ja) | 非対称勾配を用いた磁気共鳴イメージングにおける随伴磁界補正のためのシステム及び方法 | |
| US10310042B2 (en) | Hierrarchical mapping framework for coil compression in magnetic resonance image reconstruction | |
| US20190035119A1 (en) | Systems and methods for joint image reconstruction and motion estimation in magnetic resonance imaging | |
| US10126397B2 (en) | Systems and methods for fast magnetic resonance image reconstruction using a heirarchically semiseparable solver | |
| US10527695B2 (en) | Systems and methods for efficient magnetic resonance fingerprinting scheduling | |
| US9268003B2 (en) | System and method for measuring induced radio frequency current using phase contrast magnetic resonance imaging | |
| US10324149B2 (en) | Systems and methods for generalized slice dithered enhanced resolution magnetic resonance imaging | |
| WO2015164701A1 (en) | Systems and methods for fast multi-contrast magnetic resonance imaging | |
| WO2015065781A2 (en) | System and method for model-based reconstruction of quantitative images | |
| US12578408B2 (en) | Autocalibrated multi-shot magnetic resonance image reconstruction with joint optimization of shot-dependent phase and parallel image reconstruction | |
| US11035920B2 (en) | Sparse approximate encoding of Wave-CAIPI: preconditioner and noise reduction | |
| EP4065997A1 (en) | Model-based nyquist ghost correction for reverse readout echo planar imaging | |
| WO2025155687A1 (en) | Systems and methods for physics-driven mri reconstruction without access to raw k-space data | |
| WO2026015808A1 (en) | Physics-driven deep learning reconstruction of non-fourier encoded magnetic resonance imaging data | |
| CA2805580C (en) | System and method for measuring induced radio frequency current using phase contrast magnetic resonance imaging | |
| US20170030989A1 (en) | Body-CoilL-Constrained Reconstruction of Undersampled Magnetic Resonance Imaging Data |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
Patent event code: PA01091R01D Comment text: Patent Application Patent event date: 20161004 |
|
| PG1501 | Laying open of application | ||
| A201 | Request for examination | ||
| PA0201 | Request for examination |
Patent event code: PA02012R01D Patent event date: 20211005 Comment text: Request for Examination of Application Patent event code: PA02011R01I Patent event date: 20161004 Comment text: Patent Application |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20230628 Patent event code: PE09021S01D |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
Patent event code: PE07011S01D Comment text: Decision to Grant Registration Patent event date: 20240109 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
Comment text: Registration of Establishment Patent event date: 20240409 Patent event code: PR07011E01D |
|
| PR1002 | Payment of registration fee |
Payment date: 20240409 End annual number: 3 Start annual number: 1 |
|
| PG1601 | Publication of registration |