KR20170050191A - 다축 다이나모미터 시스템 및 그 제어 방법 - Google Patents
다축 다이나모미터 시스템 및 그 제어 방법 Download PDFInfo
- Publication number
- KR20170050191A KR20170050191A KR1020150151410A KR20150151410A KR20170050191A KR 20170050191 A KR20170050191 A KR 20170050191A KR 1020150151410 A KR1020150151410 A KR 1020150151410A KR 20150151410 A KR20150151410 A KR 20150151410A KR 20170050191 A KR20170050191 A KR 20170050191A
- Authority
- KR
- South Korea
- Prior art keywords
- datagram
- inverter
- dynamometer
- position information
- angular velocity
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
- 238000000034 method Methods 0.000 title claims abstract description 21
- 238000004891 communication Methods 0.000 claims abstract description 86
- 230000001360 synchronised effect Effects 0.000 claims abstract description 83
- 238000004088 simulation Methods 0.000 claims abstract description 14
- 238000013178 mathematical model Methods 0.000 claims description 20
- 230000005540 biological transmission Effects 0.000 claims description 7
- 230000001133 acceleration Effects 0.000 claims description 4
- 239000000463 material Substances 0.000 description 8
- 238000010586 diagram Methods 0.000 description 6
- 238000001514 detection method Methods 0.000 description 3
- 238000003754 machining Methods 0.000 description 3
- 238000012546 transfer Methods 0.000 description 3
- 230000000694 effects Effects 0.000 description 2
- 238000011156 evaluation Methods 0.000 description 2
- 239000000284 extract Substances 0.000 description 2
- 230000001629 suppression Effects 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
Images




Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R31/00—Arrangements for testing electric properties; Arrangements for locating electric faults; Arrangements for electrical testing characterised by what is being tested not provided for elsewhere
- G01R31/34—Testing dynamo-electric machines
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L3/00—Measuring torque, work, mechanical power, or mechanical efficiency, in general
- G01L3/16—Rotary-absorption dynamometers, e.g. of brake type
-
- G—PHYSICS
- G08—SIGNALLING
- G08C—TRANSMISSION SYSTEMS FOR MEASURED VALUES, CONTROL OR SIMILAR SIGNALS
- G08C19/00—Electric signal transmission systems
- G08C19/02—Electric signal transmission systems in which the signal transmitted is magnitude of current or voltage
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P23/00—Arrangements or methods for the control of AC motors characterised by a control method other than vector control
- H02P23/14—Estimation or adaptation of motor parameters, e.g. rotor time constant, flux, speed, current or voltage
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Control Of Multiple Motors (AREA)
Abstract
본 발명은 다축 시스템 부하 모의 장치 및 복수의 인버터 장치를 포함하는 다축 다이나모미터 시스템 및 그 제어 방법을 공개한다. 본 발명의 다축 시스템 부하 모의 장치는 복수의 인버터 장치들 중 어느 하나로 복수의 인버터 장치에 대한 토크 지령을 모두 포함한 데이터그램을 송신하면, 이를 수신한 인버터 장치가 자신의 토크지령을 판독하고 자신에게 연결된 다이나모미터의 각속도 및 회전 위치 정보를 데이터그램에 포함시켜 다른 인버터 장치로 전송하고, 이를 수신한 다른 인버터 장치 역시 자신의 토크 지령을 판독하고 자신에게 연결된 다이나모미터의 각속도 및 회전 위치 정보를 데이터그램에 포함시켜 다른 인버터 장치로 전송하며, 마지막 인버터 장치는 데이터그램을 다축 시스템 부하 모의장치로 전송함으로써, 다축 시스템 부하 모의장치는 데이터그램을 송신한 후 수신하는 1회의 동기통신을 수행함으로써, 모든 인버터 장치에 대한 정보를 획득할 수 있고, 이러한 과정을 통해서 각 인버터 장치들이 동기화되어, 상술한 다축 시스템의 관성, 백래쉬, 마찰과 관련한 부하특성을 모의하여 다축 시스템의 성능을 평가할 수 있는 효과가 나타난다.
Description
본 발명은 다축 다이나모미터 시스템 및 그 제어방법에 관한 것으로서, 보다 구체적으로는 복수의 축에 연결된 다이나모미터를 동기화한 다축 다이나모미터 시스템 및 그 제어 방법에 관한 것이다.
일반적으로, 다이나모미터 시스템은, 전동기, 엔진, 롤러 등의 부하 기기와 상기 부하 기기에서 발생한 동력을 흡수하는 다이나모미터를 공통 축으로 연결함과 동시에, 인코더 또는 축토크 미터의 검출 신호를 바탕으로 다이나모미터의 속도 또는 위치를 제어하여 부하 기기에 적당한 부하를 인가하면서, 부하 기기의 출력 성능을 시험하는 시스템을 칭한다.
다이나모미터 시스템의 일 예가 대한민국 특허 제 10-1525421 호에 공개되어 있다.
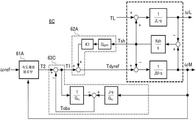
상기 대한민국 특허의 대표도를 도시한, 도 1를 참조하면, 종래 기술의 다이나모미터 시스템의 속도 제어장치(6C)는, 각속도 지령값 ref 및 다이나모미터 각속도 M을 바탕으로 토크 전류 지령값 T2를 산출하는 속도 제어 회로부(61A), 외란 옵저버 Tobs를 속도 제어 회로부(61A)에 의해 산출된 토크 전류 지령값 T2에서 감산하여 해당 토크 전류 지령값을 보정하는 외란 옵저버 보상부(63C), 및 축토크 검출값 Tsh에 필터 전달 함수 GBPF 및 억제 게인 K1을 곱해서 수득된 축토크 검출 보상량 Tsh_K를 토크 전류 지령값 T1에 가산하여 해당 토크 전류 지령값을 보정하는 축토크 검출 보상부(62A)를 구비하여 구성된다. 이 때, 축토크 검출 보상부(62A)의 필터 전달 함수 GBPF는 부하 기기 및 다이나모미터로 이루어지는 기계계의 공진 주파수 및 그 근방만을 통과 대역으로 하여 설정된다.
그러나, 상기한 종래 기술은 단일 전동기의 부하특성을 고려하여 위치제어 혹은 속도제어를 수행하는 다이나모미터 시스템으로서, 다축 시스템의 관성, 백래쉬, 마찰 등의 기계적 파라미터의 차이로 다축 운동으로 인해 발생하는 동기화 문제점에 대한 제어기의 평가가 불가능하다.
본 발명이 해결하고자 하는 과제는, 다축 시스템의 관성, 백래쉬, 마찰과 관련한 부하특성을 모의하여 다축 시스템의 성능을 평가할 수 있는 다축 다이나모미터 시스템을 제공하는 것이다.
상술한 과제를 해결하기 위한 본 발명의 바람직한 실시예에 따른 다축 다이나모미터 시스템은, 다축 시스템의 각 축에 공통으로 연결된 복수의 다이나모미터; 복수의 다이나모미터에 각각 연결되어, 자신에게 연결된 다이나모미터를 제어하는 복수의 인버터 장치; 및 상기 인버터 장치들과 동기 통신을 수행하여 상기 인버터 장치들로부터 상기 각 다이나모미터의 각속도 및 회전 위치 정보를 수신하고, 상기 각속도 및 회전 위치 정보에 따라서 상기 각 다이나모미터로 출력할 토크 지령들을 각 필드에 포함하는 데이터그램을 상기 복수의 인버터 장치로 전송하는 다축 시스템 부하 모의장치를 포함하고, 상기 다축 시스템 부하 모의장치 또는 인접한 인버터 장치로부터 데이터그램을 수신한 인버터 장치는 상기 데이터그램에서 자신에게 대응되는 토크지령을 판독하고, 자신에게 연결된 다이나모미터의 각속도 및 회전 위치 정보를 상기 데이터그램에 포함시켜 인접한 다른 인버터 장치 또는 상기 다축 시스템 부하 모의 장치로 전송한다.
또한, 상기 복수의 인버터 장치 중 상기 다축 시스템 부하 모의 장치로부터 직접 데이터그램을 수신한 인버터 장치는, 수신된 데이터그램에서 자신에게 대응되는 토크지령을 판독하고, 자신에게 연결된 다이나모미터의 가속도 및 회전 위치 정보를 데이터그램의 빈 필드에 포함시켜 인접한 인버터 장치로 송신하고, 인접한 인버터 장치로부터 데이터그램을 수신한 인버터 장치는 수신된 데이터그램에서 자신에게 대응되는 토크지령을 판독하고, 자신에게 연결된 다이나모미터의 가속도 및 회전 위치 정보를 데이터그램의 빈 필드에 포함시키고, 상기 데이터그램을 전송한 인버터 장치 이외의 인접한 인버터 장치가 존재하는 경우에는 해당 인버터 장치로 데이터그램을 전송하고, 상기 데이터그램을 전송한 인버터 장치 이외의 인접한 인버터 장치가 존재하지 않는 경우에는 데이터그램을 상기 다축 시스템 부하 모의 장치로 전송할 수 있다.
또한, 상기 다축 시스템 부하 모의 장치는, 인버터 장치로부터 수신된 데이터 그램으로부터 상기 각 인버터 장치들에 연결된 상기 각 다이나모미터들의 각속도 및 회전 위치 정보를 판독하고, 상기 각속도 및 회전 위치 정보를 상기 다축 시스템에 대한 수학적 모델에 적용하여 상기 각 다이나모미터들에 출력할 토크지령들을 생성하고, 생성된 토크지령들을 데이터그램에 포함시켜 상기 복수의 인버터 장치 중 어느 하나로 송신할 수 있다.
또한, 상기 수학적 모델은 사용자로부터 입력된 상기 다축 시스템의 기계적 형상 및 외력 모델에 따라서 생성될 수 있다.
또한, 상기 다축 시스템 부하 모의 장치는, 상기 다축 시스템의 기계적 형상에 대한 정보를 사용자로부터 입력받거나, 소정의 데이터 베이스로부터 판독하여 제어부로 출력하는 사용자 조건 입력부; 상기 다축 시스템의 외력 모델을 사용자로부터 입력받거나 소정의 데이터 베이스로부터 판독하여 상기 제어부로 출력하는 외력 모델 입력부; 상기 제어부로부터 입력된 복수의 인버터 장치들 각각에 대한 토크지령들을 포함하는 데이터그램을 생성하여 복수의 인버터 장치 중 어느 하나로 송신하는 동기통신 송신부; 복수의 인버터 장치들에서 측정된 다이나모미터의 각속도 및 회전 위치 정보를 포함하는 데이터그램을 인버터 장치로부터 수신하고, 수신된 데이터그램에 포함된 각 인버터 장치의 각속도 및 회전 위치 정보를 상기 제어부로 출력하는 동기통신 수신부; 및 상기 다축 시스템의 기계적 형상에 대한 정보 및 상기 외력 모델을 이용하여 상기 다축 시스템에 대한 수학적 모델을 생성하고, 상기 동기통신 수신부로부터 입력된 각 축의 다이나모미터의 각속도 및 회전 위치 정보를 상기 수학적 모델에 적용하여 각 다이나모미터를 제어하는 각 인버터 장치로 송신할 토크지령들을 생성하여 상기 동기통신 송신부로 출력하는 상기 제어부를 포함할 수 있다.
또한, 상기 복수의 인버터 장치는, 상기 다축 시스템 부하 모의 장치 또는 상기 인접한 인버터 장치로부터 데이터그램을 수신하여, 상기 데이터그램으로부터 상기 인버터 장치에 대한 토크 지령을 판독하여 인버터 제어부로 출력하는 동기통신 수신부; 상기 데이터그램으로부터 판독된 토크지령을 입력받고, 다이나모미터에 설치된 엔코더로부터 다이나모미터의 각속도 및 회전 위치 정보를 입력받으며, 상기 토크지령 및 각속도 및 회전 위치 정보에 따라서 상기 다이나모미터로 전원을 공급하여 상기 다이나모미터를 구동하고 제어하는 인버터 제어부; 및 상기 인버터 제어부로부터 다이나모미터의 각속도 및 회전 위치 정보를 입력받아 데이터그램에 포함시켜 인접한 인버터 장치 또는 다축 시스템 부하 모의 장치로 송신하는 동기통신 송신부를 포함할 수 있다.
한편, 상술한 과제를 해결하기 위한 본 발명의 바람직한 실시예에 따른 다축 다이나모미터 시스템 제어 방법은, 다축 시스템의 각 축에 연결된 다이나모미터를 제어하는 복수의 인버터 장치 및 상기 인버터 장치들을 제어하는 다축 시스템 부하 모의 장치를 포함하는 다축 다이나모미터 시스템의 제어 방법으로서, (a) 상기 다축 시스템 부하 모의 장치가 상기 다축 시스템의 기계적 형상에 대한 정보 및 상기 다축 시스템의 외력 모델을 사용자로부터 입력받거나, 소정의 데이터 베이스로부터 판독하는 단계; (c) 상기 다축 시스템 부하 모의 장치가 동기통신을 수행하여 상기 복수의 인버터 장치 중 어느 하나로부터 상기 인버터 장치들이 제어하는 다이나모미터들의 각속도 및 회전 위치 정보를 포함하는 데이터그램을 수신하는 단계; (d) 상기 다축 시스템 부하 모의 장치가 상기 데이터그램에서 각 다이나모미터들의 각속도 및 회전 위치 정보를 판독하고, 상기 다축 시스템의 기계적 형상에 대한 정보 및 외력 모델을 이용하여 생성된 수학적 모델에 적용하여, 각 인버터 장치로 송신할 토크지령을 생성하는 단계; (e) 상기 다축 시스템 부하 모의 장치가 상기 각 인버터 장치로 송신할 토크지령을 포함하는 데이터그램을 생성하여, 상기 복수의 인버터 장치들 중 어느 하나로 송신하는 단계; (f) 상기 데이터그램을 수신한 인버터 장치가, 상기 데이터그램에서 자신에 대한 토크지령을 판독하고, 자신에게 연결된 다이나모미터의 각속도 및 회전 위치 정보를 상기 데이터그램에 포함시켜 인접하는 인버터 장치로 전송하는 단계; 및 (g) 인접한 인버터 장치로부터 데이터그램을 수신한 인버터 장치가, 수신된 데이터그램에서 자신에 대한 토크지령을 판독하고, 자신에게 연결된 다이나모미터의 각속도 및 회전 위치 정보를 상기 데이터그램에 포함시켜 인접하는 인버터 장치 또는 상기 다축 시스템 부하 모의 장치로 전송하는 단계를 포함한다.
또한, 상기 다축 다이나모미터 시스템의 제어 방법의 상기 (a) 단계와 상기 (c) 단계 사이에, (b) 상기 다축 시스템의 기계적 형상에 대한 정보 및 상기 외력 모델을 이용하여 상기 다축 시스템에 대한 수학적 모델을 생성하는 단계를 더 포함할 수 있다.
또한, 상기 (f) 단계 및 상기 (g) 단계에서, 인버터 장치는 데이터그램에서 판독된 자신에 대한 토크지령과 자신에게 연결된 다이나모미터의 각속도 및 회전 위치 정보에 따라서 다이나모미터로 공급되는 전원을 제어하여 다이나모미터를 제어할 수 있다.
본 발명은 하나의 다축 시스템 부하 모의 장치가, 다축 시스템의 각 축에 각각 연결된 다이나모미터를 각각 제어하는 복수의 인버터 장치와 동기 통신을 수행하여, 각 인버터 장치로 토크 지령을 송신하고 다이나모미터의 각속도 및 회전 위치 정보를 수신함으로써, 각 인버터 장치들은 다축 시스템 부하 모의 장치와 동기화되고, 이로 인해서, 다축 시스템의 관성, 백래쉬, 마찰과 관련한 부하특성을 모의하여 다축 시스템의 성능을 평가할 수 있는 효과가 나타난다.
특히, 본 발명의 다축 시스템 부하 모의 장치는 복수의 인버터 장치들 중 어느 하나로 복수의 인버터 장치에 대한 토크 지령을 모두 포함한 데이터그램을 송신하면, 이를 수신한 인버터 장치가 자신의 토크지령을 판독하고 자신에게 연결된 다이나모미터의 각속도 및 회전 위치 정보를 데이터그램에 포함시켜 다른 인버터 장치로 전송하고, 이를 수신한 다른 인버터 장치 역시 자신의 토크 지령을 판독하고 자신에게 연결된 다이나모미터의 각속도 및 회전 위치 정보를 데이터그램에 포함시켜 다른 인버터 장치로 전송하며, 마지막 인버터 장치는 데이터그램을 다축 시스템 부하 모의장치로 전송함으로써, 다축 시스템 부하 모의장치는 데이터그램을 송신한 후 수신하는 1회의 동기통신을 수행함으로써, 모든 인버터 장치에 대한 정보를 획득할 수 있고, 이러한 과정을 통해서 각 인버터 장치들이 동기화되어, 상술한 다축 시스템의 관성, 백래쉬, 마찰과 관련한 부하특성을 모의하여 다축 시스템의 성능을 평가할 수 있는 효과가 나타난다.
도 1은 종래기술에 따른 단일 축 다이나모 시스템의 일 구성예를 도시한 도면이다.
도 2는 본 발명의 바람직한 실시예에 따른 다축 다이나모미터 시스템의 전체 구성을 도시하는 블록도이다.
도 3은 본 발명의 바람직한 실시예에 따른 다축 다이나모미터 시스템의 세부 구성을 도시하는 블록도이다.
도 4는 본 발명이 적용되는 다축 공작 기계의 일 예를 도시하는 도면이다.
도 5는 본 발명의 바람직한 실시예에 따른 다축 다이나모미터 시스템의 제어 방법을 설명하는 흐름도이다.
도 2는 본 발명의 바람직한 실시예에 따른 다축 다이나모미터 시스템의 전체 구성을 도시하는 블록도이다.
도 3은 본 발명의 바람직한 실시예에 따른 다축 다이나모미터 시스템의 세부 구성을 도시하는 블록도이다.
도 4는 본 발명이 적용되는 다축 공작 기계의 일 예를 도시하는 도면이다.
도 5는 본 발명의 바람직한 실시예에 따른 다축 다이나모미터 시스템의 제어 방법을 설명하는 흐름도이다.
이하, 첨부된 도면을 참조하여 본 발명의 바람직한 실시예들을 설명한다.
도 2는 본 발명의 바람직한 실시예에 따른 다축 다이나모미터 시스템의 전체 구성을 도시하는 블록도이다.
도 2를 참조하면, 본 발명의 바람직한 실시예에 따른 다축 다이나모미터 시스템은 다축 시스템(100)(예컨대, 다축 서보 시스템)의 각 축에 각각 연결된 복수의 다이나모미터(210-1,210-2), 각 다이나모미터(210-1,210-2)에 하나씩 설치된 복수의 엔코더(212-1,212-2), 각 다이나모미터(210-1,210-2)에 연결되어 해당 다이나모미터(210-1,210-2)에 설치된 엔코더(212-1,212-2)로부터 다이나모미터(210-1,210-2)의 각속도 정보 및 회전위치 정보를 입력받고 다축 시스템 부하 모의 장치(230)로부터 토크 지령을 수신하여 다이나모미터(210-1,210-2)를 제어하는 인버터 장치(220-1,220-2) 및 다이나모미터(210-1,210-2)가 설치된 축마다 설치된 인버터 장치(220-1,220-2)로 토크 지령을 전송하는 다축 시스템 부하 모의 장치(230)를 포함한다.
각 구성 요소들의 기능을 설명하면, 다축 시스템 부하 모의 장치(230)는 시험 대상인 다축 시스템(100)의 기계적 형상에 대한 정보를 입력받고, 시험 대상인 다축 시스템(100)의 외력 모델을 입력받으며, 다축 시스템(100)의 기계적 형상 및 외력 모델에 따라서 시험 대상인 다축 시스템(100)에 대한 수학적 모델을 생성한다.
또한, 다축 시스템 부하 모의 장치(230)는 각 축의 엔코더(212-1,212-2)에서 측정된 각속도 및 회전 위치를 수학적 모델에 적용하여 각 축의 인버터 장치(220-1,220-2)로 전송할 토크 지령을 생성하여, 내부에 포함된 마스터측 동기 통신부를 통해서 인버터 장치(220-1,220-2)로 전송하는 한편, 시험 대상인 다축 시스템(100)에 포함된 인버터 장치(120-1,120-2)들로 모의 디지털 출력 신호를 전송함으로써, 다축 시스템(100)이 실제 환경에서 동작하는 것과 같은 효과를 나타낼 수 있다. 여기서, 모의 디지털 출력 신호는 전동기(110-1,110-2)에 의한 모재 또는 공작기의 이동을 제한하는 리미트 신호 또는 비상 정지 신호 등이다.
다이나모미터 시스템의 각 축의 인버터 장치(220-1,220-2)는 내부에 슬레이브측 동기 통신부(221-1,221-2)를 포함하여, 다른 축의 인버터 장치(220-2,220-1)에 포함된 슬레이브측 동기 통신부(221-2,221-2)와 상호 연결되어 통신을 수행한다. 또한, 각 축의 인버터 장치(220-1,220-2)는 다축 시스템 부하 모의 장치(230)로부터 직접 수신되거나, 또는 다른 축의 인버터 장치의 동기 통신부를 통해서 다축 시스템 부하 모의 장치(230)로부터 수신된 토크 지령에 따라서 다이나모미터(210-1,210-2)가 구동되도록, 토크 지령과 엔코더(212-1,212-2)로부터 수신된 각속도 및 회전 위치 정보에 따라서 DC 전원을 AC 전원으로 변환하여 다이나모미터(210-1,210-2)로 공급함으로써 다이나모미터(210-1,210-2)를 구동하고 제어한다.
특히, 본 발명의 다축 시스템 부하 모의 장치(230)는 각각의 인버터 장치(220-1,220-2)로 출력할 토크 지령들을, 하나의 데이터그램에 포함된 각 필드에 포함시켜서 하나의 인버터 장치(220-1)로 전송하고, 각 인버터 장치(220-1,220-2)의 동기 통신부(221-1,221-2)는 데이터그램을 수신하면, 해당 데이터그램에서 자신의 토크 지령을 판독하고, 인버터 장치(220-1,220-2)에 연결된 다이나모미터(210-1,210-2)의 엔코더(212-1,212-2)로부터 수신된 각속도 및 회전위치 정보를 수신된 데이터그램의 빈 필드에 포함시켜서 다음 인버터 장치(220-2)의 동기 통신부(221-2)로 전송한다.
인접한 인버터 장치(220-1)로부터 데이터그램을 수신한 다른 인버터 장치(220-2)의 동기 통신부(221-2)는, 동일한 방식으로 데이터그램에서 자신의 토크지령을 판독하고 자신에게 연결된 엔코더(212-2)로부터 수신된 가속도 및 회전위치 정보를 수신된 데이터그램의 빈 필드에 포함시켜서 다음 인버터 장치로 전송한다.
이 때, 자신이 마지막 인버터 장치(220-2)인 경우에, 인버터 장치(220-2)의 동기 통신부(221-2)는 데이터그램을 다축 시스템 부하 모의 장치(230)로 전송하게 되고, 다축 시스템 부하 모의 장치(230)는 인버터 장치(220-2)로부터 수신된 데이터그램에서 각 인버터 장치(220-1,220-2)에 연결된 다이나모미터(210-1,210-2)의 각속도 및 회전위치 정보를 추출하고, 이를 다축 시스템(100)의 수학적 모델에 적용하여 다시 각 인버터 장치(220-1,220-2)에 전송할 토크 지령들을 생성한다.
다이나모미터(210-1,210-2)는 각 인버터 장치(220-1,220-2)로부터 AC 전원을 입력받아 구동됨으로써 전동기(110-1,110-2)에 인위적인 부하를 인가한다. 다이나모미터(210-1,210-2)의 기능은 종래 기술과 동일하므로 구체적인 설명은 생략한다.
도 3은 본 발명의 바람직한 실시예에 따른 다축 다이나모미터 시스템의 세부 구성을 도시하는 블록도이다.
도 3을 더 참조하면, 본 발명의 바람직한 실시예에 따른 다축 다이나모미터 시스템은 다축 시스템 부하 모의 장치(230) 및 복수의 인버터 장치(220-1,220-2)를 포함한다.
먼저, 다축 시스템 부하 모의 장치(230)는 사용자 조건 입력부(231), 외력 모델 입력부(232), 제어부(234), 운전 상태 출력부(233), 및 마스터측 동기 통신부(235)를 포함하고, 마스터측 동기 통신부(235)는 동기통신 수신부(235a) 및 동기통신 송신부(235b)를 포함한다.
또한, 각 인버터 장치(220-1,220-2)는 운전상태 입력부(223-1,223-2), 인버터 제어부(224-1,224-2), 슬레이브측 동기 통신부(221-1,221-2)를 포함하고, 슬레이브측 동기 통신부(221-1,221-2)는 동기통신 수신부(221-1a,221-2a) 및 동기통신 송신부(221-1b,221-2b)를 포함한다.
먼저, 다축 시스템 부하 모의 장치(230)를 설명하면, 사용자 조건 입력부(231)는 본 발명의 다축 다이나모미터 시스템이 연결되는 실제 다축 시스템(100)의 기계적 형상에 대한 정보를 사용자로부터 입력받거나, 소정의 데이터 베이스로부터 판독하여 제어부(234)로 출력한다. 실제 다축 시스템(100)의 기계적 형상에 대한 정보는 본 발명의 다축 다이나모미터 시스템이 적용되는 다축 시스템에 따라서 정해지는데, 도 4에 도시된 바와 같은 공작 기계의 경우에는 부하질량, 테이블질량, 볼스크류 샤프트 길이, 볼스크류 너트 길이, 볼스크류 리드, 리미트 스위치 위치 값, 볼스크류 마찰상수, 볼베어링 마찰상수, 커플러 비틀림상수 등과 같이 정보들이 입력된다.
외력 모델 입력부(232)는 실제 다축 시스템(100)의 외력 모델을 사용자로부터 입력받거나 소정의 데이터 베이스로부터 판독하여 제어부(234)로 출력한다. 외력모델은 다축 시스템이 단순한 위치 결정뿐만 아니라 가공을 하는 경우에, 가공물의 재질, 가공 두께, 가공구 면적, 가공속도 등의 정보를 갖는다. 이 경우, 전동기의 위치 및 회전 속도에 따른 부가적인 토크 값이 계산되어 제어부(234)로 입력된다. 참고로, 가공물의 재질 및 가공 두께에 따른 외력 모델식은 아래와 같이 주어진다.
[수학식 1]

상기 수학식 1에서 kc1 은 절단되는 모재의 절단 두께가 1mm일 때의 특정 컷팅 값, hm은 모재의 절단 두께의 역수, mc는 모재와 커터로부터 구해진 절단율 상수 값이다. 절삭동력은 모재의 재질에 따라 그 값이 달라진다.
제어부(234)는 사용자 조건 입력부(231)로부터 입력된 실제 다축 시스템(100)의 기계적 형상에 대한 정보와, 외력 모델 입력부(232)로부터 입력된 외력 모델을 이용하여, 본 발명의 다축 다이나모미터 시스템이 적용된 다축 시스템에 대한 수학적 모델을 생성하고, 마스터측 동기 통신부(235)를 통해서 각 축의 인버터 장치들(220-1,220-2)로부터 수신된 각 다이나모미터들(210-1,210-2)의 각속도 및 회전위치 정보를, 상기 생성된 수학적 모델에 적용하여 각 축의 인버터 장치(220-1,220-2)로 출력할 토크 지령을 생성한다.
예컨대, 도 4에 도시된 공작기계에 대한 정보와 상기 수학식 1의 외력 모델을 적용한 수학적 모델은 아래의 수학식 2와 같이 구해질 수 있다.
[수학식 2]
여기서, T는 모터에 걸리는 부하토크 지령치  , P는 볼스크류 리드 거리[m], W는 부하질량과 테이블의 질량의 합[kg], μ는 볼스크류 마찰계수, F는 외력[kg]이다.
, P는 볼스크류 리드 거리[m], W는 부하질량과 테이블의 질량의 합[kg], μ는 볼스크류 마찰계수, F는 외력[kg]이다.
또한, 외력 F는 다음의 수학식 3으로부터 구해진다.
[수학식 3]
위 식에서  는 외력모델 식으로부터 구해진 값을
는 외력모델 식으로부터 구해진 값을  값으로 구한 값이며, Atool은 가공공구 면적을 나타낸다.
값으로 구한 값이며, Atool은 가공공구 면적을 나타낸다.
상술한 바와 같이, 상술한 수학식 1 내지 3에 기재된 외력 모델 및 다축 시스템의 수학적 모델은 일 예에 불과하며, 본 발명의 기술적 사상이 이들에 제한되는 것은 아님을 주의해야 한다.
한편, 제어부(234)는 상기한 수학적 모델에 따라서 각 축의 토크 지령을 생성하는 한편, 다축 시스템 수학적 모델로부터, 다축 시스템의 행정거리, 가공물의 위치 및 부피 정보뿐만 아니라, 가상적인 기구학적 위치에 따른 정보(리미트 스위치 동작 여부, 긴급 정지 신호 등)를 운전상태 출력부(233)로 전달하고, 운전 상태 출력부(233)는 제어부(234)로부터 입력된 운전상태 정보를 각 인버터 장치(220-1,220-2)의 운전상태 입력부(223-1,223-2)로 전송한다.
한편, 마스터측 동기 통신부(235)는 동기통신 수신부(235a) 및 동기통신 송신부(235b)를 포함한다. 동기통신 송신부235b)는 제어부(234)로부터 입력되는 각 인버터 장치로 전송할 토크 지령들을 입력받고, 각 토크 지령이 포함된 필드들과 빈 필드들로 구성되는 데이터그램 1을 생성하여, 사전에 정의된 통신 방식에 따라서 복수의 축 중 첫 번째 축에 대응되는 인버터 장치(도 3의 예에서는 도면부호 220-1 로 표시됨)의 수신측 동기 통신부로 전송한다. 도 3에 도시된 예에서, 데이터그램 1은 복수의 필드로 구성되고, 첫 번째 및 두 번째 필드에는 제어부(234)가 생성한 각 인버터 장치(220-1,220-2)에 대한 토크 지령들(토크지령 1 및 토크지령 2)이 각각 포함되어 있고, 나머지 필드들에는 데이터가 기록되지 않은 상태이다.
또한, 마스터측 동기통신 수신부(235a)는 사전에 정의된 통신 방식에 따라서 복수의 축 중 마지막 축에 대응되는 인버터 장치(도 3의 예에서는 도면부호 220-2 로 표시됨)로부터 데이터그램(도 3의 데이터그램 3)을 수신하여 제어부(234)로 출력한다.
도 3에 도시된 예에서, 데이터그램 3은 첫 번째 및 두 번째 필드에는 제어부(234)가 생성한 각 인버터 장치(220-1,220-2)에 대한 토크 지령들(토크지령 1 및 토크지령 2)이 각각 포함되어 있고, 세 번째 필드에는 인버터 장치 1 (220-1)의 엔코더(212-1)에서 측정된 각속도 및 회전 위치 정보가 포함되어 있고, 네 번째 필드에는 인버터 장치 2 (220-2)의 엔코더(212-2)에서 측정된 각속도 및 회전 위치 정보가 포함되어 있다.
이하, 본 발명의 인버터 장치를 설명하면, 도 3에 도시된 바와 같이, 본 발명의 인버터 장치(220-1,220-2)는 각각 다이나모미터(210-1,210-2)에 연결되어 있으며, 다이나모미터(210-1,210-2)에 설치된 엔코더(212-1,212-2)로부터 가속도 및 회전 위치정보를 입력받는다.
엔코더(212-1,212-2)는 운전상태 입력부(223-1,223-2), 인버터 제어부(224-1,224-2), 슬레이브측 동기 통신부(221-1,221-2)를 포함하여 구성되고, 슬레이브측 동기 통신부(221-1,221-2)는 동기통신 수신부(221-1a,221-2a) 및 동기통신 송신부(221-1b,221-2b)를 포함하여 구성된다.
운전상태 입력부(223-1,223-2)는 상술한 다축 시스템 부하 모의 장치(230)의 운전상태 출력부(233)로부터 리미트 신호, 긴급 정지 신호와 같은 운전 상태에 관한 정보를 수신하여 인버터 제어부(224-1,224-2)로 출력한다.
인버터 제어부(224-1,224-2)는 운전상태 입력부(223-1,223-2)로부터 운전 상태에 관한 정보를 수신하고, 엔코더(212-1,212-2)로부터 다이나모미터(210-1,210-2)의 각속도 및 회전 위치 정보를 수신하며, 동기통신 수신부(221-1a,221-2a)로부터 다축 시스템 부하 모의 장치(230)가 해당 인버터 장치(220-1,220-2)로 전송한 토크 지령을 입력받는다. 그 후, 인버터 제어부(224-1,224-2)는 현재 다이나모미터(210-1,210-2)의 각속도 및 회전 위치와 토크 지령에 따라서 전원을 조절하여 다이나모미터(210-1,210-2)로 출력함으로써 다이나모미터(210-1,210-2)의 구동을 제어한다.
또한, 인버터 제어부(224-1,224-2)는 현재 엔코더(212-1,212-2)로부터 입력된 다이나모미터(210-1,210-2)의 각속도 및 회전 위치 정보를 동기통신 송신부(221-1b,221-2b)로 출력한다. 여기서, 다이나모미터(210-1,210-2)는 그 축이 전동기(110-1,110-2)와 공통이므로, 다이나모미터(210-1,210-2)에서 측정된 각속도 및 회전 위치는 전동기(110-1,110-2)의 각속도 및 회전 위치와 동일하므로, 다이나모미터(210-1,210-2)의 각속도 및 회전 위치 정보는 다축 시스템 부하 모의 장치(230)에서 전동기의 각속도 및 회전 위치 정보로서 이용된다.
동기통신 수신부(221-1a,221-2a)는 다축 시스템 부하 모의 장치(230) 또는 인접한 인버터 장치(220-1,220-2)로부터 데이터그램을 수신하고, 데이터그램에서 해당 인버터 장치(220-1,220-2)에 대한 토크 지령을 판독하여 인버터 제어부(224-1,224-2)로 출력한다.
동기통신 송신부(221-1b,221-2b)는 동기통신 수신부(221-1a,221-2a)에서 수신한 데이터그램의 빈 필드에 인버터 제어부(224-1,224-2)로부터 입력된 다이나모미터(210-1,210-2)의 각속도 및 회전 위치 정보를 포함시켜 인접한 인버터 장치(220-1,220-2) 또는 다축 시스템 부하 모의 장치(230)로 전송한다.
도 3에 도시된 예에서, 동기통신 수신부(221-1a)는 다축 시스템 부하 모의 장치(230)의 동기통신 송신부(235b)로부터 토크지령 1과 토크지령 2가 포함된 데이터그램 1을 수신하고, 자신이 포함된 인버터 장치 1(220-1)에 대응되는 토크지령 1을 판독하여 인버터 제어부(224-1)로 출력한다. 그 후, 동기통신 송신부(221-1b)는 인버터 제어부(224-1)로부터 다이나모미터(210-1)의 각속도 및 회전 위치 정보를 입력받아, 이를 데이터그램 1의 빈 필드에 기록하여 데이터그램 2를 생성하고, 데이터그램 2를 인접한 인버터 장치(220-2)의 동기통신 수신부(221-2a)로 전송한다.
인버터 장치(220-2)의 동기통신 수신부(221-2a)는 데이터그램 2를 수신하고, 자신이 포함된 인버터 장치 2(220-2)에 대응되는 토크지령 2을 판독하여 인버터 제어부(224-2)로 출력한다. 그 후, 동기통신 송신부(221-2b)는 인버터 제어부(224-2)로부터 다이나모미터(210-1,210-2)의 각속도 및 회전 위치 정보를 입력받아, 이를 데이터그램 2의 빈 필드에 기록하여 데이터그램 3을 생성하고, 데이터그램 3을 다축 시스템 부하 모의 장치(230)의 동기통신 수신부(235a)로 전송한다.
한편, 다축 시스템 부하 모의 장치(230)의 동기통신 수신부(235a)는 데이터그램 3에서 각속도 및 회전 위치 정보 1, 및 각속도 및 회전 위치 정보 2를 각각 추출하여 제어부(234)로 출력하고, 제어부(234)는 각 축의 다이나모미터(210-1,210-2)의 각속도 및 회전 위치 정보를 상술한 수학적 모델에 적용하여, 다축 시스템(100)의 각 축의 전동기(110-1,110-2)에 걸리는 부하를 각각 계산한다.
그 후, 제어부(234)는 계산된 각 축의 부하값에 따라서 각 축의 다이나모미터(210-1,210-2)에 적용할 토크 지령을 다시 생성하여 동기통신 송신부(235b)로 출력하고, 동기통신 송신부(235b)는 토크지령 1 및 토크지령 2를 각각 필드에 포함하는 데이터그램 1을 생성하여 인버터 장치 1 (220-1)의 동기통신 수신부(221-1a)로 전송한다. 이 후, 상술한 과정이 반복되면서, 각 축의 다이나모미터에 대한 제어가 수행된다.
이하에서는, 도 5를 더 참조하여, 본 발명의 바람직한 실시예에 따른 다축 다이나모미터 시스템의 제어 방법을 설명한다.
도 5는 본 발명의 바람직한 실시예에 따른 다축 다이나모미터 시스템의 제어 방법을 설명하는 흐름도이다. 도 5에 도시된 다축 다이나모미터 시스템의 제어 방법은 도 2 내지 도 4를 참조하여 설명한 다축 다이나모미터 시스템에서 수행되는 것이므로, 대부분의 기능에 대한 설명이 상술한 내용들과 중복된다. 따라서, 이하에서는 전체적인 시계열적인 흐름을 중심으로 설명한다. 다만, 명시적인 설명이 없더라도, 다축 다이나모미터 시스템에서 수행되는 기능들은 모두 다축 다이나모미터 시스템의 제어 방법에서 수행됨을 주의하여야 한다.
본 발명의 다축 다이나모미터 시스템의 제어 방법이 수행되기 위해서는, 먼저, 다축 시스템 부하 모의 장치(230)의 사용자 조건 입력부(231) 및 외력 모델 입력부(232)가, 다축 다이나모미터 시스템이 연결되어 성능 평가가 수행되는 다축 시스템(100)의 기계적 형상에 대한 정보 및 다축 시스템의 외력 모델을 각각 사용자로부터 입력받거나, 소정의 데이터 베이스로부터 판독하여 제어부(234)로 출력한다(S510).
다축 다이나모미터 시스템의 제어부(234)는 입력된 다축 시스템(100)의 기계적 형상에 대한 정보 및 상기 외력 모델을 이용하여 다축 시스템(100)에 대한 수학적 모델을 생성한다(S520).
그 후, 다축 시스템 부하 모의 장치(230)는 동기통신을 수행하여 복수의 인버터 장치(220-1,220-2) 중 어느 하나로부터, 상기 인버터 장치들(220-1,220-2)이 제어하는 다이나모미터들(210-1,210-2)의 각속도 및 회전 위치 정보를 포함하는 데이터그램을 수신한다(S530). 도 3에 도시된 예에서, 다축 시스템 부하 모의 장치(230)의 동기통신 수신부(235a)는 인버터 장치 2(220-2)로부터 데이터그램 3을 수신하는데, 데이터그램 3에는 도 3에 도시된 바와 같이, 인버터 장치 1(220-1) 및 인버터 장치 2(220-2)가 엔코더(212-1,212-2)로부터 수신한 각 다이나모미터(210-1,210-2)의 각속도 및 회전 위치 정보가 포함된다.
동기통신 수신부(235a)가 인버터 장치(220-2)로부터 수신된 데이터그램에서 각 다이나모미터들(210-1,210-2)의 각속도 및 회전 위치 정보를 판독하여 제어부(234)로 출력하면, 제어부(234)는 각 다이나모미터들(210-1,210-2)의 각속도 및 회전 위치 정보를 상기한 수학적 모델에 적용하여, 각 인버터 장치(220-1,220-2)로 송신할 토크지령(토크지령 1 및 토크지령2)을 생성하여 동기통신 송신부(235b)로 출력한다(S540).
다축 시스템 부하 모의 장치(230)의 동기통신 송신부(235b)는 각 인버터 장치(220-1,220-2)로 송신할 토크지령을 포함하는 데이터그램을 생성하여, 상기 복수의 인버터 장치들(220-1,220-2) 중 어느 하나로 송신한다(S550). 도 3에 도시된 예에서, 동기통신 송신부(235b)는 토크지령 1, 토크지령 2 및 빈 필드를 포함하는 데이터그램 1을 생성하여 인버터 장치1(220-1)의 동기통신 수신부(221-1a)로 전송한다.
토크지령이 포함된 데이터그램을 수신한 인버터 장치는, 데이터그램에서 자신에 대한 토크지령을 판독하고, 자신에게 연결된 다이나모미터의 각속도 및 회전 위치 정보를 데이터그램에 포함시켜 인접하는 인버터 장치로 전송한다(S560). 도 3에 도시된 예에서, 인버터 장치 1 (220-1)의 동기통신 수신부(221-1a)는 데이터그램 1에서 토크지령 1을 판독하여 인버터 제어부(224-1)로 출력하고, 인버터 제어부(224-1)는 엔코더(212-1)로부터 입력된 다이나모미터 1 (210-1)의 각속도 및 회전 위치 정보를 동기통신 송신부(221-1b)로 출력하며, 동기통신 송신부(221-1b)는 데이터그램 1의 빈 필드에 다이나모미터 1 (210-1)의 각속도 및 회전 위치 정보를 포함시켜 데이터그램 2를 생성하여 인접한 인버터 장치 2 (220-2)로 전송한다. 제 S560 단계에서, 인버터 장치 1 (220-1)은 데이터그램 1에서 판독된 자신에 대한 토크지령 1과 자신에게 연결된 다이나모미터 1 (210-1)의 각속도 및 회전 위치 정보에 따라서 다이나모미터 1 (210-1)로 공급되는 전원을 제어하여 다이나모미터 1(210-1)을 제어한다.
다음으로, 인접한 인버터 장치로부터 데이터그램을 수신한 다른 인버터 장치는 수신된 데이터그램에서 자신에 대한 토크지령을 판독하고, 자신에게 연결된 다이나모미터의 각속도 및 회전 위치 정보를 데이터그램에 포함시켜 인접하는 인버터 장치 또는 다축 시스템 부하 모의 장치(230)로 송신한다(S570).
도 3에 도시된 예에서, 인버터 장치 2 (220-2)의 동기통신 수신부(221-2a)는 데이터그램 2에서 토크지령 2를 판독하여 인버터 제어부(224-2)로 출력하고, 인버터 제어부(224-2)는 엔코더(212-2)로부터 입력된 다이나모미터 2 (210-2)의 각속도 및 회전 위치 정보를 동기통신 송신부(221-2b)로 출력하며, 동기통신 송신부(221-2b)는 데이터그램 2의 빈 필드에 다이나모미터 2 (210-2)의 각속도 및 회전 위치 정보를 포함시켜 데이터그램 3을 생성하여 다축 시스템 부하 모의 장치(230)로 전송한다. 제 S570 단계에서, 인버터 장치 2 (220-2)는 데이터그램 2에서 판독된 자신에 대한 토크지령 2와 자신에게 연결된 다이나모미터 2 (210-2)의 각속도 및 회전 위치 정보에 따라서 다이나모미터 2 (210-2)로 공급되는 전원을 제어하여 다이나모미터 2 (210-2)를 제어하는 것은 인버터 장치 1 (220-1)의 경우와 동일하다.
그 후, 상술한 제 S530 단계 내지 제 S570 단계가 반복적으로 수행되어, 다축 다이나모미터 시스템의 제어가 지속적으로 실행된다. 참고로, 상기 제 S530 단계 내지 제 S570 단계는 시스템의 정상 상태에서의 동작 단계들을 설명하는 것임을 주의해야 한다.
이제까지 본 발명에 대하여 그 바람직한 실시예들을 중심으로 살펴보았다. 본 발명이 속하는 기술 분야에서 통상의 지식을 가진 자는 본 발명이 본 발명의 본질적인 특성에서 벗어나지 않는 범위에서 변형된 형태로 구현될 수 있음을 이해할 수 있을 것이다. 그러므로 개시된 실시예들은 한정적인 관점이 아니라 설명적인 관점에서 고려되어야 한다. 본 발명의 범위는 전술한 설명이 아니라 특허청구범위에 나타나 있으며, 그와 동등한 범위 내에 있는 모든 차이점은 본 발명에 포함된 것으로 해석되어야 할 것이다.
100 : 다축 시스템
110-1,110-2 : 전동기
120-1,120-2 : 인버터 장치 130 : 다축 시스템 제어기
210-1 : 다이나모미터 1 210-2 : 다이나모미터 2
212-1, 212-2 : 엔코더
220-1 : 인버터 장치 1 221-1 : 슬레이브측 동기 통신부
221-1a : 슬레이브측 동기통신 수신부
221-1b : 슬레이브측 동기통신 송신부
223-1 : 운전 상태 입력부
224-1 : 인버터 제어부
220-2 : 인버터 장치 2 221-2 : 슬레이브측 동기 통신부
221-2a : 슬레이브측 동기통신 수신부
221-2b : 슬레이브측 동기통신 송신부
223-2 : 운전 상태 입력부
224-2 : 인버터 제어부
230 : 다축 부하 시스템 모의 장치
231 : 사용자 조건 입력부 232 : 외력 모델 입력부
233 : 운전 상태 출력부 234 : 제어부
235 : 마스터측 동기통신부 235a : 마스터측 동기통신 수신부
235b : 마스터측 동기통신 송신부
120-1,120-2 : 인버터 장치 130 : 다축 시스템 제어기
210-1 : 다이나모미터 1 210-2 : 다이나모미터 2
212-1, 212-2 : 엔코더
220-1 : 인버터 장치 1 221-1 : 슬레이브측 동기 통신부
221-1a : 슬레이브측 동기통신 수신부
221-1b : 슬레이브측 동기통신 송신부
223-1 : 운전 상태 입력부
224-1 : 인버터 제어부
220-2 : 인버터 장치 2 221-2 : 슬레이브측 동기 통신부
221-2a : 슬레이브측 동기통신 수신부
221-2b : 슬레이브측 동기통신 송신부
223-2 : 운전 상태 입력부
224-2 : 인버터 제어부
230 : 다축 부하 시스템 모의 장치
231 : 사용자 조건 입력부 232 : 외력 모델 입력부
233 : 운전 상태 출력부 234 : 제어부
235 : 마스터측 동기통신부 235a : 마스터측 동기통신 수신부
235b : 마스터측 동기통신 송신부
Claims (9)
- 다축 시스템의 각 축에 공통으로 연결된 복수의 다이나모미터;
복수의 다이나모미터에 각각 연결되어, 자신에게 연결된 다이나모미터를 제어하는 복수의 인버터 장치; 및
상기 인버터 장치들과 동기 통신을 수행하여 상기 인버터 장치들로부터 상기 각 다이나모미터의 각속도 및 회전 위치 정보를 수신하고, 상기 각속도 및 회전 위치 정보에 따라서 상기 각 다이나모미터로 출력할 토크 지령들을 각 필드에 포함하는 데이터그램을 상기 복수의 인버터 장치로 전송하는 다축 시스템 부하 모의장치를 포함하고,
상기 다축 시스템 부하 모의장치 또는 인접한 인버터 장치로부터 데이터그램을 수신한 인버터 장치는 상기 데이터그램에서 자신에게 대응되는 토크지령을 판독하고, 자신에게 연결된 다이나모미터의 각속도 및 회전 위치 정보를 상기 데이터그램에 포함시켜 인접한 다른 인버터 장치 또는 상기 다축 시스템 부하 모의 장치로 전송하는 것을 특징으로 하는 다축 다이나모미터 시스템.
- 제 1 항에 있어서,
상기 복수의 인버터 장치 중 상기 다축 시스템 부하 모의 장치로부터 직접 데이터그램을 수신한 인버터 장치는 수신된 데이터그램에서 자신에게 대응되는 토크지령을 판독하고, 자신에게 연결된 다이나모미터의 가속도 및 회전 위치 정보를 데이터그램의 빈 필드에 포함시켜 인접한 인버터 장치로 송신하고,
인접한 인버터 장치로부터 데이터그램을 수신한 인버터 장치는 수신된 데이터그램에서 자신에게 대응되는 토크지령을 판독하고, 자신에게 연결된 다이나모미터의 가속도 및 회전 위치 정보를 데이터그램의 빈 필드에 포함시키고, 상기 데이터그램을 전송한 인버터 장치 이외의 인접한 인버터 장치가 존재하는 경우에는 해당 인버터 장치로 데이터그램을 전송하고, 상기 데이터그램을 전송한 인버터 장치 이외의 인접한 인버터 장치가 존재하지 않는 경우에는 데이터그램을 상기 다축 시스템 부하 모의 장치로 전송하는 것을 특징으로 하는 다축 다이나모미터 시스템.
- 제 2 항에 있어서, 상기 다축 시스템 부하 모의 장치는
인버터 장치로부터 수신된 데이터 그램으로부터 상기 각 인버터 장치들에 연결된 상기 각 다이나모미터들의 각속도 및 회전 위치 정보를 판독하고,
상기 각속도 및 회전 위치 정보를 상기 다축 시스템에 대한 수학적 모델에 적용하여 상기 각 다이나모미터들에 출력할 토크지령들을 생성하고, 생성된 토크지령들을 데이터그램에 포함시켜 상기 복수의 인버터 장치 중 어느 하나로 송신하는 것을 특징으로 하는 다축 다이나모미터 시스템.
- 제 3 항에 있어서,
상기 수학적 모델은 사용자로부터 입력된 상기 다축 시스템의 기계적 형상 및 외력 모델에 따라서 생성되는 것을 특징으로 하는 다축 나이나모미터 시스템.
- 제 4 항에 있어서, 상기 다축 시스템 부하 모의 장치는
상기 다축 시스템의 기계적 형상에 대한 정보를 사용자로부터 입력받거나, 소정의 데이터 베이스로부터 판독하여 제어부로 출력하는 사용자 조건 입력부;
상기 다축 시스템의 외력 모델을 사용자로부터 입력받거나 소정의 데이터 베이스로부터 판독하여 상기 제어부로 출력하는 외력 모델 입력부;
상기 제어부로부터 입력된 복수의 인버터 장치들 각각에 대한 토크지령들을 포함하는 데이터그램을 생성하여 복수의 인버터 장치 중 어느 하나로 송신하는 동기통신 송신부;
복수의 인버터 장치들에서 측정된 다이나모미터의 각속도 및 회전 위치 정보를 포함하는 데이터그램을 인버터 장치로부터 수신하고, 수신된 데이터그램에 포함된 각 인버터 장치의 각속도 및 회전 위치 정보를 상기 제어부로 출력하는 동기통신 수신부; 및
상기 다축 시스템의 기계적 형상에 대한 정보 및 상기 외력 모델을 이용하여 상기 다축 시스템에 대한 수학적 모델을 생성하고, 상기 동기통신 수신부로부터 입력된 각 축의 다이나모미터의 각속도 및 회전 위치 정보를 상기 수학적 모델에 적용하여 각 다이나모미터를 제어하는 각 인버터 장치로 송신할 토크지령들을 생성하여 상기 동기통신 송신부로 출력하는 상기 제어부를 포함하는 것을 특징으로 하는 다축 다이나모미터 시스템.
- 제 4 항에 있어서, 상기 복수의 인버터 장치는
상기 다축 시스템 부하 모의 장치 또는 상기 인접한 인버터 장치로부터 데이터그램을 수신하여, 상기 데이터그램으로부터 상기 인버터 장치에 대한 토크 지령을 판독하여 인버터 제어부로 출력하는 동기통신 수신부;
상기 데이터그램으로부터 판독된 토크지령을 입력받고, 다이나모미터에 설치된 엔코더로부터 다이나모미터의 각속도 및 회전 위치 정보를 입력받으며, 상기 토크지령 및 각속도 및 회전 위치 정보에 따라서 상기 다이나모미터로 전원을 공급하여 상기 다이나모미터를 구동하고 제어하는 인버터 제어부; 및
상기 인버터 제어부로부터 다이나모미터의 각속도 및 회전 위치 정보를 입력받아 데이터그램에 포함시켜 인접한 인버터 장치 또는 다축 시스템 부하 모의 장치로 송신하는 동기통신 송신부를 포함하는 것을 특징으로 하는 다축 다이나모미터 시스템.
- 다축 시스템의 각 축에 연결된 다이나모미터를 제어하는 복수의 인버터 장치 및 상기 인버터 장치들을 제어하는 다축 시스템 부하 모의 장치를 포함하는 다축 다이나모미터 시스템의 제어 방법으로서,
(a) 상기 다축 시스템 부하 모의 장치가 상기 다축 시스템의 기계적 형상에 대한 정보 및 상기 다축 시스템의 외력 모델을 사용자로부터 입력받거나, 소정의 데이터 베이스로부터 판독하는 단계;
(c) 상기 다축 시스템 부하 모의 장치가 동기통신을 수행하여 상기 복수의 인버터 장치 중 어느 하나로부터 상기 인버터 장치들이 제어하는 다이나모미터들의 각속도 및 회전 위치 정보를 포함하는 데이터그램을 수신하는 단계;
(d) 상기 다축 시스템 부하 모의 장치가 상기 데이터그램에서 각 다이나모미터들의 각속도 및 회전 위치 정보를 판독하고, 상기 다축 시스템의 기계적 형상에 대한 정보 및 외력 모델을 이용하여 생성된 수학적 모델에 적용하여, 각 인버터 장치로 송신할 토크지령을 생성하는 단계;
(e) 상기 다축 시스템 부하 모의 장치가 상기 각 인버터 장치로 송신할 토크지령을 포함하는 데이터그램을 생성하여, 상기 복수의 인버터 장치들 중 어느 하나로 송신하는 단계;
(f) 상기 데이터그램을 수신한 인버터 장치가, 상기 데이터그램에서 자신에 대한 토크지령을 판독하고, 자신에게 연결된 다이나모미터의 각속도 및 회전 위치 정보를 상기 데이터그램에 포함시켜 인접하는 인버터 장치로 전송하는 단계; 및
(g) 인접한 인버터 장치로부터 데이터그램을 수신한 인버터 장치가, 수신된 데이터그램에서 자신에 대한 토크지령을 판독하고, 자신에게 연결된 다이나모미터의 각속도 및 회전 위치 정보를 상기 데이터그램에 포함시켜 인접하는 인버터 장치 또는 상기 다축 시스템 부하 모의 장치로 전송하는 단계를 포함하는 것을 특징으로 하는 다축 다이나모미터 시스템의 제어 방법.
- 제 7 항에 있어서, 상기 (a) 단계와 상기 (c) 단계 사이에
(b) 상기 다축 시스템의 기계적 형상에 대한 정보 및 상기 외력 모델을 이용하여 상기 다축 시스템에 대한 수학적 모델을 생성하는 단계를 더 포함하는 것을 특징으로 하는 다축 다이나모미터 시스템의 제어 방법.
- 제 7 항에 있어서, 상기 (f) 단계 및 상기 (g) 단계에서,
인버터 장치는 데이터그램에서 판독된 자신에 대한 토크지령과 자신에게 연결된 다이나모미터의 각속도 및 회전 위치 정보에 따라서 다이나모미터로 공급되는 전원을 제어하여 다이나모미터를 제어하는 것을 특징으로 하는 다축 다이나모미터 시스템의 제어 방법.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020150151410A KR20170050191A (ko) | 2015-10-29 | 2015-10-29 | 다축 다이나모미터 시스템 및 그 제어 방법 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020150151410A KR20170050191A (ko) | 2015-10-29 | 2015-10-29 | 다축 다이나모미터 시스템 및 그 제어 방법 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20170050191A true KR20170050191A (ko) | 2017-05-11 |
Family
ID=58741777
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020150151410A Withdrawn KR20170050191A (ko) | 2015-10-29 | 2015-10-29 | 다축 다이나모미터 시스템 및 그 제어 방법 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR20170050191A (ko) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107272656A (zh) * | 2017-07-21 | 2017-10-20 | 河南工业大学 | 时变分数阶fcor多轴协同控制系统性能评估方法 |
| CN108549026A (zh) * | 2018-05-08 | 2018-09-18 | 广州视源电子科技股份有限公司 | 多轴控制系统的同步性能检测方法、装置和系统 |
-
2015
- 2015-10-29 KR KR1020150151410A patent/KR20170050191A/ko not_active Withdrawn
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107272656A (zh) * | 2017-07-21 | 2017-10-20 | 河南工业大学 | 时变分数阶fcor多轴协同控制系统性能评估方法 |
| CN108549026A (zh) * | 2018-05-08 | 2018-09-18 | 广州视源电子科技股份有限公司 | 多轴控制系统的同步性能检测方法、装置和系统 |
| CN108549026B (zh) * | 2018-05-08 | 2020-11-24 | 广州视源电子科技股份有限公司 | 多轴控制系统的同步性能检测方法、装置和系统 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5759013B2 (ja) | 制御プログラム、制御方法及び制御装置 | |
| CN104339351A (zh) | 机器人控制装置 | |
| WO2015156350A1 (ja) | 入出力装置およびステアリング測定装置 | |
| Adewusi | Modeling and parameter identification of a DC motor using constraint optimization technique | |
| US11340578B2 (en) | Machine control system, machine controller, and vibration suppression command generation method | |
| Sun et al. | Enhancement of feed drive dynamics using additional table speed feedback | |
| KR20170050191A (ko) | 다축 다이나모미터 시스템 및 그 제어 방법 | |
| US20130098147A1 (en) | Method and device for simulating a body that is moved in a translational or rotational manner | |
| Zeng et al. | The electromagnetic balancing regulator and the automatic balancing system | |
| JP4019710B2 (ja) | エンジンベンチシステム | |
| Ting et al. | Research on dual drive synchronization performance based on virtual shaft control strategy | |
| Bacelli et al. | Design and bench testing of a model-scale WEC for advanced PTO control research | |
| Adib et al. | Dynamic load emulation for evaluating evs machines based on sliding mode control | |
| JPH112588A (ja) | ダイナモメータによって慣性の力を模擬する方法 | |
| WO2006046500A1 (ja) | 通信遅延を有する通信路を介して信号を送受信する遠隔制御システム | |
| KR102558850B1 (ko) | 모터 구동 장치 | |
| Suchý et al. | Dynamic emulation of mechanical loads—Analysis and implementation into industrial drive | |
| JP7491190B2 (ja) | 二慣性系模擬装置 | |
| JPH06225564A (ja) | 電動機駆動系の負荷定数測定方法 | |
| Kokuryu et al. | Wide-bandwidth bilateral control using two stage actuator systems: Evaluation results of a prototype | |
| CN108918142A (zh) | 一种机器人rv减速机全自动测试仪 | |
| EP3855413B1 (en) | Control loading with slotted motor | |
| Šlapák et al. | Load Emulation for Testing of Electrical Actuators in Industrial Applications | |
| Rodic̆ et al. | Dynamic emulation of mechanical loads—position control approach | |
| Kaiser et al. | Identification of a Lumped-Parameter-Model for a Dual-Motor Robotic Drive Train with Backlash and Electrical Preload |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
Patent event code: PA01091R01D Comment text: Patent Application Patent event date: 20151029 |
|
| PG1501 | Laying open of application | ||
| PC1203 | Withdrawal of no request for examination |