KR20170053989A - 기립 보조 방법 및 장치 - Google Patents
기립 보조 방법 및 장치 Download PDFInfo
- Publication number
- KR20170053989A KR20170053989A KR1020150156615A KR20150156615A KR20170053989A KR 20170053989 A KR20170053989 A KR 20170053989A KR 1020150156615 A KR1020150156615 A KR 1020150156615A KR 20150156615 A KR20150156615 A KR 20150156615A KR 20170053989 A KR20170053989 A KR 20170053989A
- Authority
- KR
- South Korea
- Prior art keywords
- user
- standing
- information
- torque
- state
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images













Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H3/00—Appliances for aiding patients or disabled persons to walk about
- A61H3/008—Appliances for aiding patients or disabled persons to walk about using suspension devices for supporting the body in an upright walking or standing position, e.g. harnesses
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H1/00—Apparatus for passive exercising; Vibrating apparatus; Chiropractic devices, e.g. body impacting devices, external devices for briefly extending or aligning unbroken bones
- A61H1/02—Stretching or bending or torsioning apparatus for exercising
- A61H1/0237—Stretching or bending or torsioning apparatus for exercising for the lower limbs
- A61H1/0244—Hip
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61G—TRANSPORT, PERSONAL CONVEYANCES, OR ACCOMMODATION SPECIALLY ADAPTED FOR PATIENTS OR DISABLED PERSONS; OPERATING TABLES OR CHAIRS; CHAIRS FOR DENTISTRY; FUNERAL DEVICES
- A61G5/00—Chairs or personal conveyances specially adapted for patients or disabled persons, e.g. wheelchairs
- A61G5/10—Parts, details or accessories
- A61G5/14—Standing-up or sitting-down aids
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H3/00—Appliances for aiding patients or disabled persons to walk about
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/103—Measuring devices for testing the shape, pattern, colour, size or movement of the body or parts thereof, for diagnostic purposes
- A61B5/11—Measuring movement of the entire body or parts thereof, e.g. head or hand tremor or mobility of a limb
- A61B5/1113—Local tracking of patients, e.g. in a hospital or private home
- A61B5/1114—Tracking parts of the body
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/103—Measuring devices for testing the shape, pattern, colour, size or movement of the body or parts thereof, for diagnostic purposes
- A61B5/11—Measuring movement of the entire body or parts thereof, e.g. head or hand tremor or mobility of a limb
- A61B5/1116—Determining posture transitions
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/103—Measuring devices for testing the shape, pattern, colour, size or movement of the body or parts thereof, for diagnostic purposes
- A61B5/11—Measuring movement of the entire body or parts thereof, e.g. head or hand tremor or mobility of a limb
- A61B5/1118—Determining activity level
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H1/00—Apparatus for passive exercising; Vibrating apparatus; Chiropractic devices, e.g. body impacting devices, external devices for briefly extending or aligning unbroken bones
- A61H1/02—Stretching or bending or torsioning apparatus for exercising
- A61H1/0237—Stretching or bending or torsioning apparatus for exercising for the lower limbs
- A61H1/0255—Both knee and hip of a patient, e.g. in supine or sitting position, the feet being moved together in a plane substantially parallel to the body-symmetrical plane
- A61H1/0262—Walking movement; Appliances for aiding disabled persons to walk
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2503/00—Evaluating a particular growth phase or type of persons or animals
- A61B2503/08—Elderly
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H3/00—Appliances for aiding patients or disabled persons to walk about
- A61H2003/005—Appliances for aiding patients or disabled persons to walk about with knee, leg or stump rests
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H3/00—Appliances for aiding patients or disabled persons to walk about
- A61H2003/007—Appliances for aiding patients or disabled persons to walk about secured to the patient, e.g. with belts
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/12—Driving means
- A61H2201/1207—Driving means with electric or magnetic drive
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/12—Driving means
- A61H2201/1253—Driving means driven by a human being, e.g. hand driven
- A61H2201/1261—Driving means driven by a human being, e.g. hand driven combined with active exercising of the patient
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/14—Special force transmission means, i.e. between the driving means and the interface with the user
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/16—Physical interface with patient
- A61H2201/1602—Physical interface with patient kind of interface, e.g. head rest, knee support or lumbar support
- A61H2201/1628—Pelvis
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/16—Physical interface with patient
- A61H2201/1602—Physical interface with patient kind of interface, e.g. head rest, knee support or lumbar support
- A61H2201/1628—Pelvis
- A61H2201/163—Pelvis holding means therefor
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/16—Physical interface with patient
- A61H2201/1602—Physical interface with patient kind of interface, e.g. head rest, knee support or lumbar support
- A61H2201/164—Feet or leg, e.g. pedal
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/16—Physical interface with patient
- A61H2201/1602—Physical interface with patient kind of interface, e.g. head rest, knee support or lumbar support
- A61H2201/164—Feet or leg, e.g. pedal
- A61H2201/1642—Holding means therefor
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/16—Physical interface with patient
- A61H2201/1602—Physical interface with patient kind of interface, e.g. head rest, knee support or lumbar support
- A61H2201/165—Wearable interfaces
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/16—Physical interface with patient
- A61H2201/1657—Movement of interface, i.e. force application means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/50—Control means thereof
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/50—Control means thereof
- A61H2201/5007—Control means thereof computer controlled
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/50—Control means thereof
- A61H2201/5058—Sensors or detectors
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/50—Control means thereof
- A61H2201/5058—Sensors or detectors
- A61H2201/5061—Force sensors
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/50—Control means thereof
- A61H2201/5058—Sensors or detectors
- A61H2201/5064—Position sensors
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/50—Control means thereof
- A61H2201/5058—Sensors or detectors
- A61H2201/5069—Angle sensors
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/50—Control means thereof
- A61H2201/5058—Sensors or detectors
- A61H2201/5071—Pressure sensors
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2203/00—Additional characteristics concerning the patient
- A61H2203/04—Position of the patient
- A61H2203/0406—Standing on the feet
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2205/00—Devices for specific parts of the body
- A61H2205/10—Leg
- A61H2205/102—Knee
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Epidemiology (AREA)
- Pain & Pain Management (AREA)
- Physical Education & Sports Medicine (AREA)
- Rehabilitation Therapy (AREA)
- Engineering & Computer Science (AREA)
- Biophysics (AREA)
- Molecular Biology (AREA)
- Physics & Mathematics (AREA)
- Dentistry (AREA)
- Pathology (AREA)
- Physiology (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Surgery (AREA)
- Orthopedic Medicine & Surgery (AREA)
- Rehabilitation Tools (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Manipulator (AREA)
- Prostheses (AREA)
- Measurement Of The Respiration, Hearing Ability, Form, And Blood Characteristics Of Living Organisms (AREA)
Abstract
Description
도 3은 일 예에 따른 일어서는 동작을 도시한다.
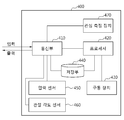
도 4는 일 실시예에 따른 기립 보조 장치의 구성도이다.
도 5는 일 실시예에 따른 기립 보조 방법의 흐름도이다.
도 6은 일 예에 따른 압력 센서가 부착된 위치를 도시한다.
도 7은 일 예에 따른 제공되는 보조력을 도시한다.
도 8은 일 예에 따른 기립 패턴을 생성하는 방법의 흐름도이다.
도 9는 일 예에 따른 생성된 기립 패턴을 도시한다.
도 10은 다른 일 예에 따른 생성된 기립 패턴을 도시한다.
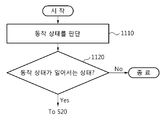
도 11은 일 예에 따른 동작 상태가 일어서는 상태인지 여부를 판단하는 방법의 흐름도이다.
도 12는 일 예에 따른 사용자의 동작 상태를 판단하는 방법의 흐름도이다.
도 13은 일 예에 따른 사용자의 관절 각도를 도시한다.
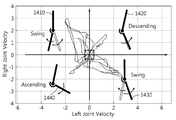
도 14는 일 예에 따른 동작 이벤트를 사용자의 오른쪽 다리의 회전 각속도 및 왼쪽 다리의 회전 각속도에 따라 구분한 그래프이다.
도 15는 일 예에 따른 동작 이벤트를 단순화한 모델을 도시한다.
도 16는 일 예에 따른 복수의 동작 상태들에 대한 천이를 도시한다.

| x | e | x<-e | -e≤x≤e | e<x | |
| LA | lq | 5° | -1 | 0 | 1 |
| RA | rq | 5° | -1 | 0 | 1 |
| LSA | lq | 45° | -1 | 0 | 1 |
| RSA | rq | 45° | -1 | 0 | 1 |
| DA | lq-rq | 15° | -1 | 0 | 1 |
| LW | lw | 2°/s | -1 | 0 | 1 |
| RW | rw | 2°/s | -1 | 0 | 1 |
| 스윙 이벤트 | 폄 이벤트 | 상승 이벤트 | 굽힘 이벤트 | 하강 이벤트 | |
| lq | ㆍ | < θs | ㆍ | > θs | ㆍ |
| rq | ㆍ | < θs | ㆍ | > θs | ㆍ |
| lq-rq | ㆍ | ≒0 | ≒0 | ≒0 | ≒0 |
| lw | + - | ≒0 | - | ≒0 | + |
| rw | - + | ≒0 | - | ≒0 | + |
| duration | >tswg | >text | >tasc | >tflx | >tdsc |
| LA | RA | LSA | RSA | DA | LW | RW | Duration | |
| 하강 이벤트 | 1 | 1 | ㆍ | ㆍ | 0 | 1 | 1 | >20ms |
| 상승 이벤트 | 1 | 1 | ㆍ | ㆍ | 0 | -1 | -1 | >20ms |
| 굽힘 이벤트 | ㆍ | ㆍ | -1 | -1 | 0 | 0 | 0 | >50ms |
| 폄 이벤트 | ㆍ | ㆍ | 1 | 1 | 0 | 0 | 0 | >50ms |
| 스윙 이벤트 | ㆍ | ㆍ | ㆍ | ㆍ | ㆍ | 1 | -1 | >20ms |
| ㆍ | ㆍ | ㆍ | ㆍ | ㆍ | -1 | 1 |
410: 통신부
420: 프로세서
430: 구동 장치
440: 저장부
450: 압력 센서
460: 관절 각도 센서
470: 관성 측정 장치
Claims (24)
- 사용자의 신체 부위에 가해지는 압력을 측정하는 단계;
상기 측정된 압력에 대응하는 토크에 관한 정보를 획득하는 단계; 및
상기 토크에 관한 정보에 기반하여 상기 사용자의 신체에 기립 보조력을 제공하는 단계
를 포함하는,
기립 보조 방법.
- 제1항에 있어서,
상기 신체 부위는 무릎인,
기립 보조 방법.
- 제2항에 있어서,
상기 무릎에 가해지는 압력은 상기 사용자의 손에 의해 가해지는,
기립 보조 방법.
- 제1항에 있어서,
상기 사용자의 동작 상태를 판단하는 단계
를 더 포함하고,
상기 토크에 관한 정보를 획득하는 단계는,
상기 동작 상태가 일어서는 상태인 경우 수행되는,
기립 보조 방법.
- 제4항에 있어서,
상기 동작 상태를 판단하는 단계는,
상기 사용자의 하나 이상의 관절 각도들을 측정하는 단계
를 포함하고,
상기 동작 상태를 판단하는 단계는 상기 하나 이상의 관절 각도들에 기반하여 상기 동작 상태를 판단하는,
기립 보조 방법.
- 제5항에 있어서,
상기 하나 이상의 관절 각도들은 상기 사용자의 왼쪽 고관절의 각도 및 오른쪽 고관절의 각도를 포함하는,
기립 보조 방법.
- 제5항에 있어서,
상기 하나 이상의 관절 각도들은 상기 사용자의 왼쪽 무릎 관절의 각도 및 오른쪽 무릎 관절의 각도를 포함하는,
기립 보조 방법.
- 제5항에 있어서,
상기 하나 이상의 관절 각도들은 상기 사용자의 왼쪽 발목 관절의 각도 및 오른쪽 발목 관절의 각도를 포함하는,
기립 보조 방법.
- 제4항에 있어서,
상기 동작 상태를 판단하는 단계는,
상기 사용자의 상체 움직임을 센싱하는 단계; 및
상기 센싱된 상체 움직임에 기반하여 상기 동작 상태를 판단하는 단계
를 포함하는,
기립 보조 방법.
- 제9항에 있어서,
상기 센싱하는 단계는,
관성 측정 장치(Inertial measurement unit)를 이용하여 상기 상체 움직임을 센싱하는 단계인,
기립 보조 방법.
- 제4항에 있어서,
상기 동작 상태를 판단하는 단계는,
상기 사용자의 하나 이상의 관절 각도들을 측정하는 단계;
상기 사용자의 상체 움직임을 센싱하는 단계;
상기 하나 이상의 관절 각도들 및 상기 상체 움직임에 기반하여 상기 사용자의 다리의 회전 정보를 추정하는 단계; 및
상기 회전 정보에 기반하여 상기 동작 상태를 판단하는 단계
를 포함하는,
기립 보조 방법.
- 제11항에 있어서,
상기 회전 정보에 기반하여 상기 동작 상태를 판단하는 단계는,
미리 설정된 복수의 동작 상태들 중 상기 추정된 회전 정보에 대응하는 동작 상태를 판단하는 단계
를 포함하는,
기립 보조 방법.
- 제12항에 있어서,
상기 미리 설정된 복수의 동작 상태들은 서있는 상태, 앉아 있는 상태, 일어서는 상태 및 앉는 상태를 포함하는,
기립 보조 방법.
- 제4항에 있어서,
상기 동작 상태를 판단하는 단계는,
미리 설정된 복수의 동작 상태들 중 상기 사용자의 하나 이상의 관절 각도들에 대응하는 동작 상태를 판단하는 단계
를 포함하는,
기립 보조 방법.
- 제1항에 있어서,
상기 획득된 토크에 관한 정보의 패턴을 저장하는 단계; 및
상기 저장된 토크에 관한 정보의 패턴에 기반하여 상기 사용자의 기립 패턴을 생성하는 단계
를 더 포함하는
기립 보조 방법.
- 제15항에 있어서,
상기 사용자의 상기 동작 상태를 판단하는 단계
를 더 포함하고,
상기 보조력을 제공하는 단계는,
상기 기립 패턴이 생성되어 있는 경우 상기 기립 패턴에 대응하는 제2 토크에 관한 정보를 구동 장치에 설정하는 단계; 및
상기 제2 토크에 관한 정보에 기반하여 상기 사용자의 신체에 보조력을 제공하는 단계
를 포함하고,
상기 보조력을 제공하는 단계는,
상기 판단된 동작 상태가 일어서는 상태인 경우 수행되는,
기립 보조 방법.
- 제15항에 있어서,
상기 사용자의 기립 패턴을 생성하는 단계는,
추가적인 하나 이상의 토크에 관한 정보의 패턴들에 기반하여 상기 기립 패턴을 조정하는 단계
를 포함하는,
기립 보조 방법
- 사용자의 신체 부위에 가해지는 압력을 측정하는 압력 센서;
상기 측정된 압력에 대응하는 토크에 관한 정보를 획득하는 프로세서; 및
상기 토크에 관한 정보에 기반하여 상기 사용자의 신체에 기립 보조력을 제공하는 구동 장치
를 포함하는,
기립 보조 장치.
- 제18항에 있어서,
상기 압력 센서는 상기 사용자의 무릎에 가해지는 압력을 측정하는,
기립 보조 장치.
- 제18항에 있어서,
상기 프로세서는 상기 사용자의 동작 상태를 판단하고, 상기 동작 상태가 일어서는 상태인 경우 상기 토크에 관한 정보를 획득하는,
기립 보조 장치.
- 제20항에 있어서,
상기 사용자의 상체 움직임을 센싱하는 관성 측정 장치(Inertial measurement unit)
를 더 포함하고,
상기 프로세서는 상기 센싱된 상체 움직임에 기반하여 상기 동작 상태를 판단하는,
기립 보조 장치.
- 제20항에 있어서,
상기 사용자의 하나 이상의 관절 각도들을 측정하는 하나 이상의 관절 각도 센서들; 및
상기 사용자의 상체 움직임을 센싱하는 관성 측정 장치
를 더 포함하고,
상기 프로세서는 상기 하나 이상의 관절 각도들 및 상기 상체 움직임에 기반하여 상기 사용자의 다리의 회전 정보를 추정하고, 상기 회전 정보에 기반하여 상기 동작 상태를 판단하는,
기립 보조 장치.
- 제18항에 있어서,
상기 획득된 토크에 관한 정보의 패턴을 저장하는 저장부
를 더 포함하고,
상기 프로세서는 상기 저장된 토크에 관한 정보의 패턴에 기반하여 상기 사용자의 기립 패턴을 생성하는,
기립 보조 장치.
- 제23항에 있어서,
상기 프로세서는 상기 사용자의 동작 상태를 판단하고, 상기 판단된 동작 상태가 일어서는 상태인 경우 및 상기 기립 패턴이 생성되어 있는 경우 상기 기립 패턴에 대응하는 제2 토크에 관한 정보를 구동 장치에 설정하고,
상기 구동 장치는 상기 제2 토크에 관한 정보에 기반하여 상기 사용자의 신체에 보조력을 제공하는,
기립 보조 장치.
Priority Applications (8)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020150156615A KR102503910B1 (ko) | 2015-11-09 | 2015-11-09 | 기립 보조 방법 및 장치 |
| US15/083,456 US10912692B2 (en) | 2015-11-09 | 2016-03-29 | Standing-up assistance method and apparatus |
| EP16170162.8A EP3165211B1 (en) | 2015-11-09 | 2016-05-18 | Standing-up assistance method and apparatus |
| EP20186737.1A EP3753542B1 (en) | 2015-11-09 | 2016-05-18 | Standing-up assistance method and apparatus |
| CN201610528149.6A CN106667727B (zh) | 2015-11-09 | 2016-07-06 | 站立辅助方法和设备 |
| JP2016154405A JP6884526B2 (ja) | 2015-11-09 | 2016-08-05 | 起立補助方法及び装置 |
| US17/125,485 US20210100704A1 (en) | 2015-11-09 | 2020-12-17 | Standing-up assistance method and apparatus |
| KR1020230022284A KR102762511B1 (ko) | 2015-11-09 | 2023-02-20 | 기립 보조 방법 및 장치 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020150156615A KR102503910B1 (ko) | 2015-11-09 | 2015-11-09 | 기립 보조 방법 및 장치 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020230022284A Division KR102762511B1 (ko) | 2015-11-09 | 2023-02-20 | 기립 보조 방법 및 장치 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20170053989A true KR20170053989A (ko) | 2017-05-17 |
| KR102503910B1 KR102503910B1 (ko) | 2023-02-27 |
Family
ID=56083917
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020150156615A Active KR102503910B1 (ko) | 2015-11-09 | 2015-11-09 | 기립 보조 방법 및 장치 |
| KR1020230022284A Active KR102762511B1 (ko) | 2015-11-09 | 2023-02-20 | 기립 보조 방법 및 장치 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020230022284A Active KR102762511B1 (ko) | 2015-11-09 | 2023-02-20 | 기립 보조 방법 및 장치 |
Country Status (5)
| Country | Link |
|---|---|
| US (2) | US10912692B2 (ko) |
| EP (2) | EP3753542B1 (ko) |
| JP (1) | JP6884526B2 (ko) |
| KR (2) | KR102503910B1 (ko) |
| CN (1) | CN106667727B (ko) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20190026243A (ko) * | 2017-09-04 | 2019-03-13 | 삼성전자주식회사 | 보행 보조 장치의 토크 출력 방법 및 장치 |
| WO2023249259A1 (ko) * | 2022-06-23 | 2023-12-28 | 삼성전자주식회사 | 웨어러블 운동 장치 및 이의 동작 방법과 운동 자세 평가 방법 |
Families Citing this family (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2553225C2 (ru) | 2008-05-23 | 2015-06-10 | Сива Корпорейшн | Способ облегчения регенерации |
| US8721571B2 (en) | 2010-11-22 | 2014-05-13 | Siwa Corporation | Selective removal of cells having accumulated agents |
| US10358502B2 (en) | 2014-12-18 | 2019-07-23 | Siwa Corporation | Product and method for treating sarcopenia |
| US10889634B2 (en) | 2015-10-13 | 2021-01-12 | Siwa Corporation | Anti-age antibodies and methods of use thereof |
| KR102503910B1 (ko) * | 2015-11-09 | 2023-02-27 | 삼성전자주식회사 | 기립 보조 방법 및 장치 |
| EP3513776B1 (en) * | 2016-09-13 | 2020-05-27 | Fuji Corporation | Assistance device |
| WO2018065967A1 (en) * | 2016-10-07 | 2018-04-12 | Rewalk Robotics Ltd. | Devices, systems and methods for pressure detection in an exoskeleton system |
| US10858449B1 (en) | 2017-01-06 | 2020-12-08 | Siwa Corporation | Methods and compositions for treating osteoarthritis |
| US10995151B1 (en) | 2017-01-06 | 2021-05-04 | Siwa Corporation | Methods and compositions for treating disease-related cachexia |
| US11096847B2 (en) | 2017-02-03 | 2021-08-24 | Toyota Motor Engineering & Manufacturing North America, Inc. | Exoskeleton wheelchair system |
| CA3059803A1 (en) | 2017-04-13 | 2018-10-18 | Siwa Corporation | Humanized monoclonal advanced glycation end-product antibody |
| JP6945145B2 (ja) * | 2017-06-26 | 2021-10-06 | パナソニックIpマネジメント株式会社 | アシスト装置及びアシスト装置の作動方法 |
| US20190152047A1 (en) * | 2017-11-20 | 2019-05-23 | Steering Solutions Ip Holding Corporation | Biomechanical assistive device |
| US11518801B1 (en) | 2017-12-22 | 2022-12-06 | Siwa Corporation | Methods and compositions for treating diabetes and diabetic complications |
| CN112218608B (zh) * | 2018-06-05 | 2022-11-25 | 株式会社富士 | 护理装置的管理装置及管理方法 |
| JP7289246B2 (ja) | 2019-05-29 | 2023-06-09 | パナソニック インテレクチュアル プロパティ コーポレーション オブ アメリカ | 下肢筋力評価方法、下肢筋力評価プログラム、下肢筋力評価装置及び下肢筋力評価システム |
| CN112006703B (zh) * | 2019-05-29 | 2024-05-31 | 松下电器(美国)知识产权公司 | 下肢肌肉力量评价方法、评价装置、评价系统以及记录介质 |
| CN111281738A (zh) * | 2020-01-20 | 2020-06-16 | 深圳市丞辉威世智能科技有限公司 | 动作状态转换方法、装置、设备及可读存储介质 |
| CN111297530B (zh) * | 2020-01-20 | 2022-07-15 | 深圳市丞辉威世智能科技有限公司 | 肢体辅助训练方法、设备、控制终端及可读存储介质 |
| CN111297529B (zh) * | 2020-01-20 | 2022-05-13 | 深圳市丞辉威世智能科技有限公司 | 坐站辅助训练方法、设备、控制终端及可读存储介质 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20120071797A1 (en) * | 2010-03-17 | 2012-03-22 | Toyota Jidosha Kabushiki Kaisha | Leg assist device |
| KR20120107928A (ko) * | 2009-08-31 | 2012-10-04 | 아이워크, 아이엔씨. | 의족 보철 또는 지지대를 이용하는 기립 시퀀스의 구현 |
| US20150088269A1 (en) * | 2013-09-26 | 2015-03-26 | Samsung Electronics Co., Ltd. | Wearable robots and control methods thereof |
Family Cites Families (41)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| AU688348B2 (en) * | 1993-07-09 | 1998-03-12 | Kinetecs, Inc. | Exercise apparatus and technique |
| JPH0819577A (ja) | 1994-07-08 | 1996-01-23 | Fujitsu Ltd | 介助装置 |
| JP4159627B2 (ja) * | 1997-03-13 | 2008-10-01 | 三菱電機株式会社 | リハビリ装置 |
| EP1242588A2 (en) * | 1999-11-12 | 2002-09-25 | Lexicon Genetics Incorporated | Human proteins with homology to carboxypeptidases and polynucleotides encoding the same |
| US7153242B2 (en) * | 2001-05-24 | 2006-12-26 | Amit Goffer | Gait-locomotor apparatus |
| JP4611580B2 (ja) * | 2001-06-27 | 2011-01-12 | 本田技研工業株式会社 | トルク付与システム |
| US7396337B2 (en) * | 2002-11-21 | 2008-07-08 | Massachusetts Institute Of Technology | Powered orthotic device |
| US6976698B2 (en) | 2003-04-24 | 2005-12-20 | Rehabilitation Institute Of Chicago | Manually operable standing wheelchair |
| JP4315766B2 (ja) * | 2003-05-21 | 2009-08-19 | 本田技研工業株式会社 | 歩行補助装置 |
| JP4291093B2 (ja) * | 2003-09-11 | 2009-07-08 | 本田技研工業株式会社 | 2足歩行移動体の関節モーメント推定方法 |
| WO2005074369A2 (en) | 2004-02-05 | 2005-08-18 | Motorika Inc. | Methods and apparatuses for rehabilitation exercise and training |
| JP4503311B2 (ja) * | 2004-02-25 | 2010-07-14 | 本田技研工業株式会社 | 脚体運動補助装具の発生トルク制御方法 |
| JP4200492B2 (ja) * | 2004-03-11 | 2008-12-24 | 国立大学法人 筑波大学 | 装着式動作補助装置 |
| JP2006204485A (ja) | 2005-01-27 | 2006-08-10 | Mihoko Nishimura | 歩行補助機 |
| JP4588666B2 (ja) * | 2005-05-27 | 2010-12-01 | 本田技研工業株式会社 | 歩行補助装置の制御装置および制御プログラム |
| KR100651638B1 (ko) | 2005-12-30 | 2006-12-01 | 서강대학교산학협력단 | 지능형 근력 및 보행 보조용 로봇의 허벅지 압력 센서 |
| KR100975557B1 (ko) | 2008-12-24 | 2010-08-13 | 한양대학교 산학협력단 | 인체 하지용 근력 보조 로봇과 이의 보행제어 방법 |
| JP5244029B2 (ja) * | 2009-05-25 | 2013-07-24 | 本田技研工業株式会社 | 歩行補助装置 |
| WO2011002306A1 (en) * | 2009-07-01 | 2011-01-06 | Rex Bionics Limited | Control system for a mobility aid |
| JP5083461B2 (ja) * | 2010-06-21 | 2012-11-28 | トヨタ自動車株式会社 | 脚支援装置 |
| US9682006B2 (en) * | 2010-09-27 | 2017-06-20 | Vanderbilt University | Movement assistance devices |
| WO2012048123A1 (en) * | 2010-10-06 | 2012-04-12 | Berkeley Bionics | Human machine interfaces for lower extremity orthotics |
| JP5841787B2 (ja) | 2011-02-25 | 2016-01-13 | 川崎重工業株式会社 | 装着型動作支援装置 |
| JP5316708B2 (ja) * | 2010-12-16 | 2013-10-16 | トヨタ自動車株式会社 | 歩行支援装置 |
| JP5642534B2 (ja) * | 2010-12-27 | 2014-12-17 | Cyberdyne株式会社 | 装着式動作補助装置、そのインタフェース装置及びプログラム |
| JP2013056041A (ja) * | 2011-09-08 | 2013-03-28 | Panasonic Corp | 立ち上がり補助システム |
| US9572520B2 (en) * | 2011-12-21 | 2017-02-21 | Shinshu University | Movement assistance device, and synchrony based control method for movement assistance device |
| KR101353974B1 (ko) | 2012-02-14 | 2014-01-23 | 경북대학교 산학협력단 | 하지 지지 보조기구 및 그 동작 방법 |
| JP2014068869A (ja) | 2012-09-28 | 2014-04-21 | Equos Research Co Ltd | 歩行支援装置及び歩行支援プログラム |
| JP2014073222A (ja) * | 2012-10-04 | 2014-04-24 | Sony Corp | 運動補助装置及び運動補助方法 |
| KR20140078492A (ko) | 2012-12-17 | 2014-06-25 | 현대자동차주식회사 | 로봇제어장치 및 방법 |
| WO2014104360A1 (ja) * | 2012-12-28 | 2014-07-03 | 株式会社東芝 | 動作情報処理装置及び方法 |
| WO2014194257A1 (en) * | 2013-05-31 | 2014-12-04 | President And Fellows Of Harvard College | Soft exosuit for assistance with human motion |
| JP6187049B2 (ja) | 2013-08-30 | 2017-08-30 | 船井電機株式会社 | 歩行アシスト移動体 |
| JP5880504B2 (ja) * | 2013-09-17 | 2016-03-09 | 株式会社安川電機 | 動作補助装置 |
| JP5801859B2 (ja) | 2013-10-23 | 2015-10-28 | 株式会社テオリック | 立ち上がり補助具 |
| KR102186859B1 (ko) | 2014-01-09 | 2020-12-04 | 삼성전자주식회사 | 보행 보조 기구 및 보행 보조 기구의 제어 방법 |
| JP6357628B2 (ja) | 2014-01-30 | 2018-07-18 | 国立大学法人 筑波大学 | 装着式動作補助装置、及び装着式動作補助装置の操作ユニット |
| JP5758028B1 (ja) * | 2014-06-19 | 2015-08-05 | 本田技研工業株式会社 | 歩数計測器、歩行補助装置および歩数計測プログラム |
| JP6272735B2 (ja) * | 2014-06-19 | 2018-01-31 | 本田技研工業株式会社 | 歩行補助装置および歩行制御プログラム |
| KR102503910B1 (ko) * | 2015-11-09 | 2023-02-27 | 삼성전자주식회사 | 기립 보조 방법 및 장치 |
-
2015
- 2015-11-09 KR KR1020150156615A patent/KR102503910B1/ko active Active
-
2016
- 2016-03-29 US US15/083,456 patent/US10912692B2/en active Active
- 2016-05-18 EP EP20186737.1A patent/EP3753542B1/en active Active
- 2016-05-18 EP EP16170162.8A patent/EP3165211B1/en active Active
- 2016-07-06 CN CN201610528149.6A patent/CN106667727B/zh active Active
- 2016-08-05 JP JP2016154405A patent/JP6884526B2/ja active Active
-
2020
- 2020-12-17 US US17/125,485 patent/US20210100704A1/en active Pending
-
2023
- 2023-02-20 KR KR1020230022284A patent/KR102762511B1/ko active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20120107928A (ko) * | 2009-08-31 | 2012-10-04 | 아이워크, 아이엔씨. | 의족 보철 또는 지지대를 이용하는 기립 시퀀스의 구현 |
| US20120071797A1 (en) * | 2010-03-17 | 2012-03-22 | Toyota Jidosha Kabushiki Kaisha | Leg assist device |
| US20150088269A1 (en) * | 2013-09-26 | 2015-03-26 | Samsung Electronics Co., Ltd. | Wearable robots and control methods thereof |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20190026243A (ko) * | 2017-09-04 | 2019-03-13 | 삼성전자주식회사 | 보행 보조 장치의 토크 출력 방법 및 장치 |
| WO2023249259A1 (ko) * | 2022-06-23 | 2023-12-28 | 삼성전자주식회사 | 웨어러블 운동 장치 및 이의 동작 방법과 운동 자세 평가 방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN106667727B (zh) | 2021-07-13 |
| JP2017086871A (ja) | 2017-05-25 |
| EP3165211B1 (en) | 2020-08-26 |
| KR20230033691A (ko) | 2023-03-08 |
| EP3753542B1 (en) | 2024-09-04 |
| KR102503910B1 (ko) | 2023-02-27 |
| US20210100704A1 (en) | 2021-04-08 |
| EP3165211A1 (en) | 2017-05-10 |
| CN106667727A (zh) | 2017-05-17 |
| EP3753542C0 (en) | 2024-09-04 |
| US10912692B2 (en) | 2021-02-09 |
| EP3753542A1 (en) | 2020-12-23 |
| JP6884526B2 (ja) | 2021-06-09 |
| US20170128291A1 (en) | 2017-05-11 |
| KR102762511B1 (ko) | 2025-02-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102762511B1 (ko) | 기립 보조 방법 및 장치 | |
| US12121489B2 (en) | Method and apparatus for controlling balance | |
| JP6383351B2 (ja) | 下肢装具用のヒューマンマシンインターフェース | |
| CN103813771B (zh) | 运动辅助装置和运动辅助方法、计算机程序以及程序记录介质 | |
| CN109760015B (zh) | 用于转弯步行的控制方法和控制设备 | |
| KR102626098B1 (ko) | 보행 보조 장치를 제어하는 방법 및 그 방법을 수행하는 전자 장치 | |
| US11744764B2 (en) | Method and device for assisting walking | |
| JP6516283B2 (ja) | 運動解析装置 | |
| KR102094852B1 (ko) | 토크 설정 방법 및 장치 | |
| KR20180031409A (ko) | 보행 보조 장치 및 보행 보조 장치의 제어 방법 | |
| WO2005079725A1 (ja) | 脚体運動補助装具の発生トルク制御方法 | |
| KR20160079627A (ko) | 보조력 설정 방법 및 장치 | |
| JP2016043092A (ja) | 運動測定装置 | |
| KR20180076759A (ko) | 센서 장치 및 센서 장치를 이용하는 보행 보조 장치 | |
| JP6281608B2 (ja) | 複数リンクシステム、制御方法、並びにコンピューター・プログラム | |
| CN110338996A (zh) | 一种轮椅控制方法 | |
| KR20160087779A (ko) | 보행 시스템 | |
| Li et al. | Gait mode recognition using an inertial measurement unit to control an ankle-foot orthosis during stair ascent and descent | |
| KR102205833B1 (ko) | 토크 설정 방법 및 장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
St.27 status event code: A-0-1-A10-A12-nap-PA0109 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-2-2-P10-P22-nap-X000 |
|
| A201 | Request for examination | ||
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| D13-X000 | Search requested |
St.27 status event code: A-1-2-D10-D13-srh-X000 |
|
| D14-X000 | Search report completed |
St.27 status event code: A-1-2-D10-D14-srh-X000 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| E13-X000 | Pre-grant limitation requested |
St.27 status event code: A-2-3-E10-E13-lim-X000 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| A107 | Divisional application of patent | ||
| PA0107 | Divisional application |
St.27 status event code: A-0-1-A10-A18-div-PA0107 St.27 status event code: A-0-1-A10-A16-div-PA0107 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U11-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 4 |
|
| U11 | Full renewal or maintenance fee paid |
Free format text: ST27 STATUS EVENT CODE: A-4-4-U10-U11-OTH-PR1001 (AS PROVIDED BY THE NATIONAL OFFICE) Year of fee payment: 4 |