KR20170059182A - 휠 조립체 및 이를 갖춘 로봇 청소기 - Google Patents
휠 조립체 및 이를 갖춘 로봇 청소기 Download PDFInfo
- Publication number
- KR20170059182A KR20170059182A KR1020150163196A KR20150163196A KR20170059182A KR 20170059182 A KR20170059182 A KR 20170059182A KR 1020150163196 A KR1020150163196 A KR 1020150163196A KR 20150163196 A KR20150163196 A KR 20150163196A KR 20170059182 A KR20170059182 A KR 20170059182A
- Authority
- KR
- South Korea
- Prior art keywords
- elastic member
- guide portion
- guide
- wheel
- arm
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images

















Classifications
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/009—Carrying-vehicles; Arrangements of trollies or wheels; Means for avoiding mechanical obstacles
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/24—Floor-sweeping machines, motor-driven
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4063—Driving means; Transmission means therefor
- A47L11/4069—Driving or transmission means for the cleaning tools
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4072—Arrangement of castors or wheels
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01D—HARVESTING; MOWING
- A01D34/00—Mowers; Mowing apparatus of harvesters
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01D—HARVESTING; MOWING
- A01D69/00—Driving mechanisms or parts thereof for harvesters or mowers
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L2201/00—Robotic cleaning machines, i.e. with automatic control of the travelling movement or the cleaning operation
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L2201/00—Robotic cleaning machines, i.e. with automatic control of the travelling movement or the cleaning operation
- A47L2201/04—Automatic control of the travelling movement; Automatic obstacle detection
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L2201/00—Robotic cleaning machines, i.e. with automatic control of the travelling movement or the cleaning operation
- A47L2201/06—Control of the cleaning action for autonomous devices; Automatic detection of the surface condition before, during or after cleaning
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/28—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means
- A47L9/2868—Arrangements for power supply of vacuum cleaners or the accessories thereof
- A47L9/2884—Details of arrangements of batteries or their installation
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Manipulator (AREA)
- Electric Suction Cleaners (AREA)
Abstract
Description
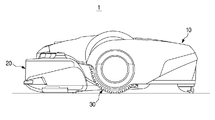
도 2는 본 발명의 제 1 실시예에 따른 로봇 청소기가 평평한 곳을 통과할 경우를 보인 도면이다.
도 3은 본 발명의 제 1 실시예에 따른 로봇 청소기가 높이 차이가 있는 바닥면을 통과할 경우를 보인 도면이다.
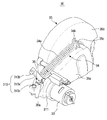
도 4는 본 발명의 제 1 실시예에 따른 휠 조립체가 로봇 청소기에 설치된 상태를 보인 사시도이다.
도 5는 본 발명의 제 1 실시예에 따른 휠 조립체의 사시도이다.
도 6은 본 발명의 제 1 실시예에 따른 휠 조립체의 분해 사시도이다.
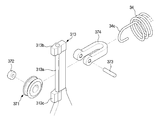
도 7은 본 발명의 제 1 실시예에 따른 휠 조립체에 적용된 이동 부시의 설치 상태를 보인 분해 사시도이다.
도 8은 본 발명의 제 1 실시예에 따른 휠 조립체의 측면도이다.
도 9 내지 도 11은 본 발명의 제 1 실시예에 따른 휠 조립체의 동작 상태도이다.
도 12는 본 발명의 제 2 실시예에 따른 휠 조립체에 적용된 롤러 및 홀더의 설치 상태를 보인 사시도이다.
도 13는 본 발명의 제 2 실시예에 따른 휠 조립체의 측면도이다.
도 14 내지 도 16은 본 발명에 따른 휠 조립체에 적용되는 여러 다른 형태의 가이드를 보인 측면도이다.
도 17은 본 발명의 제 3 실시예에 따른 휠 조립체에 적용된 피니언 및 홀더의 설치 상태를 보인 사시도이다.
도 18는 본 발명의 제 3 실시예에 따른 휠 조립체의 측면도이다.
도 19는 본 발명의 제 3 실시예에 적용될 수 있는 다른 형태의 가이드를 보인 측면도이다.
도 20은 본 발명의 실시예들에 따라 구동 휠에 작용하는 수직항력을 보인 그래프이다.
20: 흡입유닛 30: 휠 조립체
31: 회동 암 32: 구동 휠
33: 구동모터 34: 탄성부재
35: 휠 하우징
Claims (22)
- 본체와,
상기 본체에 결합되어 상기 본체의 이동을 안내하는 휠 조립체를 포함하며,
상기 휠 조립체는 제 1 단부가 상기 본체에 회전 가능하게 설치되는 회동 암과, 상기 제 1 단부의 반대측인 상기 회동 암의 제 2 단부에 회전 가능하게 설치되는 구동 휠과, 제 1 단은 상기 본체에 설치되고 상기 제 1 단과 반대측인 제 2 단은 상기 회동 암에 상하로 이동 가능하게 설치되는 탄성부재를 포함하는 로봇 청소기. - 제 1 항에 있어서,
상기 회동 암은 상기 제 1 단부로부터 상하로 연장된 가이드를 포함하며,
상기 탄성부재의 상기 제 2 단은 상기 가이드에 이동 가능하게 설치되는 로봇 청소기. - 제 2 항에 있어서,
상기 가이드는 상기 탄성부재의 상기 제 1 단의 이동을 안내하는 가이드부와,
상기 가이드부의 상단 및 하단에 마련되어 상기 탄성부재의 상기 제2 단의 이동을 제한하는 한 쌍의 스토퍼부를 포함하는 로봇 청소기. - 제 3 항에 있어서,
상기 탄성부재는 코일 형상의 탄성부와, 상기 본체에 지지되는 제 1 걸림부와, 상기 가이드부에 지지되는 제 2 걸림부를 포함하는 로봇 청소기. - 제 4 항에 있어서,
호 형상으로 형성되어 상기 가이드부에 이동 가능하게 설치되는 이동 부시를 더 포함하며,
상기 이동 부시는 원주 방향으로 마련되어 제 2 걸림부가 안착되는 안착홈을 포함하는 로봇 청소기. - 제 4 항에 있어서,
상기 가이드부에 이동 가능하게 설치되는 롤러를 더 포함하며,
상기 제 2 걸림부는 상기 롤러에 연결되는 로봇 청소기. - 제 6 항에 있어서,
상기 롤러의 중앙에 설치되는 베어링과,
양단이 축을 통해 베어링과 결합되는 홀더를 더 포함하며,
상기 제 1 걸림부는 상기 홀더에 지지되는 로봇 청소기. - 제 3 항에 있어서,
상기 가이드부는 직선 형태로 형성되는 로봇 청소기. - 제 3 항에 있어서,
상기 가이드부는 서로 둔각을 이루도록 경사지게 연결된 두 개의 직선 구간을 포함하는 로봇 청소기. - 제 3 항에 있어서,
상기 가이드부는 오목한 곡선으로 형성되는 로봇 청소기. - 제 5 항에 있어서,
상기 가이드부는 랙 기어로 형성되며,
상기 가이드부에 이동 가능하게 설치되는 피니언과,
양단이 축을 통해 피니언과 결합되는 홀더를 더 포함하며,
상기 제 2 걸림부는 상기 홀더에 지지되는 로봇 청소기. - 제 11 항에 있어서,
상기 가이드부는 이너 기어 형태로 형성되는 로봇 청소기. - 제 1 항에 있어서,
상기 휠 조립체는 한 쌍이 구비되어 상기 본체의 양측에 결합되는 로봇 청소기. - 휠 하우징과,
상기 휠 하우징에 하측으로 이동 가능하게 배치되는 구동 휠과,
제 1 단부를 중심으로 회전 가능하며 상기 제 1 단부의 반대측인 제 2 단부에는 상기 구동 휠이 설치되는 회동 암과,
제 1 단은 상기 휠 하우징에 설치되고 상기 제 1 단과 반대측인 제 2 단은 상기 회동 암에 상하로 이동 가능하게 설치되는 탄성부재를 포함하는 휠 조립체. - 제 14 항에 있어서,
상기 회동 암은 상기 제 1 단부로부터 상하로 연장된 가이드를 포함하며,
상기 탄성부재의 상기 제 2 단은 상기 가이드에 이동 가능하게 설치되는 휠 조립체. - 제 15 항에 있어서,
상기 가이드는 상기 탄성부재의 상기 제 1 단을 이동을 안내하는 가이드부와,
상기 가이드부의 상단 및 하단에 마련되어 상기 탄성부재의 상기 제 2 단의 이동 을 제한하는 한 쌍의 스토퍼부를 포함하는 휠 조립체. - 제 16 항에 있어서,
상기 탄성부재는 코일 형상의 탄성부와, 상기 본체에 지지되는 제 1 걸림부와, 상기 가이드부에 지지되는 제 2 걸림부를 포함하는 휠 조립체. - 제 17 항에 있어서,
호 형상으로 형성되어 상기 가이드부에 이동 가능하게 설치되는 부시를 더 포함하며,
상기 이동 부시는 원주 방향으로 마련되어 제 2 걸림부가 안착되는 안착홈을 포함하는 휠 조립체. - 제 17 항에 있어서,
상기 가이드부에 이동 가능하게 설치되는 롤러와,
상기 롤러의 중앙에 설치되는 베어링과,
양단이 축을 통해 상기 베어링과 결합되는 홀더를 더 포함하며,
상기 제 2 걸림부는 상기 홀더에 지지되는 휠 조립체. - 제 17 항에 있어서,
상기 가이드부는 랙 기어로 형성되며,
상기 가이드부에 이동 가능하게 설치되는 피니언과,
양단이 축을 통해 피니언과 결합되는 홀더를 더 포함하며,
상기 제 2 걸림부는 상기 홀더에 지지되는 휠 조립체. - 제 1 단부가 이동하는 물체에 회전 가능하게 설치되는 회동 암과, 상기 제 1 단부 반대측인 상기 회동 암의 제 2 단부에 회전 가능하게 설치되는 구동 휠과, 제 1 단은 상기 물체에 설치되고 상기 제 1 단과 반대측인 제 2 단은 상기 회동 암에 상하로 이동 가능하게 설치되는 탄성부재를 포함하여,
상기 회동 암이 상기 상기 제 1 단부를 중심으로 회전하면서 상기 회동 암의 상기 제 2 단부에 배치된 구동 휠이 하측으로 이동하고,
상기 구동 휠이 하측으로 이동함에 따라 상기 탄성부재의 상기 제 2 단이 상측으로 이동하는 휠 조립체의 동작 방법. - 제 21 항에 있어서,
상기 회동 암의 상기 제 1 단부에는 상기 탄성부재의 상기 제 2 단의 이동을 안내하는 가이드가 마련되며,
상기 구동 휠이 하측으로 이동함에 따라 상기 탄성부재와 상기 가이드 사이의 각도는 둔각에서 예각으로 점진적으로 전환되는 휠 조립체의 동작 방법.
Priority Applications (7)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020150163196A KR102376774B1 (ko) | 2015-11-20 | 2015-11-20 | 휠 조립체 및 이를 갖춘 로봇 청소기 |
| CN201680067252.3A CN108289579B (zh) | 2015-11-20 | 2016-11-16 | 轮组件和具有该轮组件的机器人清洁器 |
| EP16866647.7A EP3342322B1 (en) | 2015-11-20 | 2016-11-16 | Wheel assembly and robot cleaner having same |
| US15/767,255 US11083353B2 (en) | 2015-11-20 | 2016-11-16 | Wheel assembly and robot cleaner having same |
| PCT/KR2016/013214 WO2017086695A1 (ko) | 2015-11-20 | 2016-11-16 | 휠 조립체 및 이를 갖춘 로봇 청소기 |
| AU2016356448A AU2016356448B2 (en) | 2015-11-20 | 2016-11-16 | Wheel assembly and robot cleaner having same |
| US17/365,302 US11627850B2 (en) | 2015-11-20 | 2021-07-01 | Wheel assembly and robot cleaner having same |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020150163196A KR102376774B1 (ko) | 2015-11-20 | 2015-11-20 | 휠 조립체 및 이를 갖춘 로봇 청소기 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20170059182A true KR20170059182A (ko) | 2017-05-30 |
| KR102376774B1 KR102376774B1 (ko) | 2022-03-21 |
Family
ID=58717486
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020150163196A Active KR102376774B1 (ko) | 2015-11-20 | 2015-11-20 | 휠 조립체 및 이를 갖춘 로봇 청소기 |
Country Status (6)
| Country | Link |
|---|---|
| US (2) | US11083353B2 (ko) |
| EP (1) | EP3342322B1 (ko) |
| KR (1) | KR102376774B1 (ko) |
| CN (1) | CN108289579B (ko) |
| AU (1) | AU2016356448B2 (ko) |
| WO (1) | WO2017086695A1 (ko) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109008831A (zh) * | 2018-09-30 | 2018-12-18 | 江苏美的清洁电器股份有限公司 | 扫地机器人的滚轮传动装置和具有其的扫地机器人 |
| CN110115549A (zh) * | 2018-02-05 | 2019-08-13 | 科沃斯机器人股份有限公司 | 自移动机器人及其行走方法 |
| KR20220002693A (ko) * | 2019-07-08 | 2022-01-06 | 엘지전자 주식회사 | 로봇 청소기 |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107440614B (zh) * | 2017-08-07 | 2019-12-20 | 江苏美的清洁电器股份有限公司 | 吸尘器 |
| CN109340335B (zh) * | 2018-09-11 | 2021-08-24 | 安克创新科技股份有限公司 | 一种智能自移动设备及其减速装置 |
| CN110623608A (zh) * | 2019-11-01 | 2019-12-31 | 深圳市杉川机器人有限公司 | 清洁机器人底盘以及清洁机器人 |
| KR102270318B1 (ko) * | 2020-03-13 | 2021-06-29 | 주식회사 유진로봇 | 휠 슬립 방지를 위한 휠 어셈블리 구조 및 그를 이용한 이동 로봇 |
| CN115227146B (zh) * | 2021-04-22 | 2024-10-22 | 宁波方太厨具有限公司 | 一种地面清洁装置及工作方法 |
| CN115005715B (zh) * | 2022-07-15 | 2024-11-05 | 北京顺造科技有限公司 | 一种地刷组件及湿式表面清洁设备 |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20130021211A (ko) * | 2011-08-22 | 2013-03-05 | 삼성전자주식회사 | 로봇청소기 및 그 제어방법 |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR100963387B1 (ko) * | 2003-05-07 | 2010-06-14 | 엘지전자 주식회사 | 로봇 진공청소기의 휠어셈블리 |
| KR100507926B1 (ko) * | 2003-06-30 | 2005-08-17 | 삼성광주전자 주식회사 | 로봇청소기의 구동장치 |
| KR100518819B1 (ko) * | 2003-08-01 | 2005-10-05 | 삼성전자주식회사 | 이동로봇 |
| CN201119841Y (zh) * | 2007-07-24 | 2008-09-24 | 方曙光 | 自动吸尘器的驱动轮装置 |
| KR20090028359A (ko) * | 2007-09-14 | 2009-03-18 | 삼성광주전자 주식회사 | 이동체의 휠구동장치 |
| KR101018720B1 (ko) | 2008-06-12 | 2011-03-04 | 주식회사 한울로보틱스 | 로봇청소기의 구동장치 |
| GB0918027D0 (en) * | 2009-10-15 | 2009-12-02 | Dyson Technology Ltd | A surface trating appliance |
| EP2570064B1 (en) * | 2011-09-01 | 2015-04-01 | Samsung Electronics Co., Ltd. | Driving wheel assembly and robot cleaner having the same |
| KR101984575B1 (ko) * | 2012-06-25 | 2019-09-03 | 엘지전자 주식회사 | 로봇 청소기 및 그 제어 방법 |
| KR20140000811U (ko) * | 2012-07-25 | 2014-02-06 | 현대중공업 주식회사 | 허브 플랜지용 리프팅 밴드 |
| GB2497452B (en) * | 2013-03-01 | 2013-10-23 | Dyson Technology Ltd | Drive arrangement for an autonomous surface treating appliance |
| JP2014230714A (ja) * | 2013-05-30 | 2014-12-11 | シャープ株式会社 | 自走式電子機器 |
-
2015
- 2015-11-20 KR KR1020150163196A patent/KR102376774B1/ko active Active
-
2016
- 2016-11-16 WO PCT/KR2016/013214 patent/WO2017086695A1/ko not_active Ceased
- 2016-11-16 US US15/767,255 patent/US11083353B2/en active Active
- 2016-11-16 AU AU2016356448A patent/AU2016356448B2/en not_active Ceased
- 2016-11-16 CN CN201680067252.3A patent/CN108289579B/zh active Active
- 2016-11-16 EP EP16866647.7A patent/EP3342322B1/en active Active
-
2021
- 2021-07-01 US US17/365,302 patent/US11627850B2/en active Active
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20130021211A (ko) * | 2011-08-22 | 2013-03-05 | 삼성전자주식회사 | 로봇청소기 및 그 제어방법 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110115549A (zh) * | 2018-02-05 | 2019-08-13 | 科沃斯机器人股份有限公司 | 自移动机器人及其行走方法 |
| CN109008831A (zh) * | 2018-09-30 | 2018-12-18 | 江苏美的清洁电器股份有限公司 | 扫地机器人的滚轮传动装置和具有其的扫地机器人 |
| KR20220002693A (ko) * | 2019-07-08 | 2022-01-06 | 엘지전자 주식회사 | 로봇 청소기 |
Also Published As
| Publication number | Publication date |
|---|---|
| US11627850B2 (en) | 2023-04-18 |
| WO2017086695A1 (ko) | 2017-05-26 |
| AU2016356448B2 (en) | 2022-03-10 |
| US20210321842A1 (en) | 2021-10-21 |
| EP3342322B1 (en) | 2020-02-19 |
| US20190090703A1 (en) | 2019-03-28 |
| AU2016356448A1 (en) | 2018-04-26 |
| EP3342322A1 (en) | 2018-07-04 |
| US11083353B2 (en) | 2021-08-10 |
| EP3342322A4 (en) | 2018-11-14 |
| CN108289579A (zh) | 2018-07-17 |
| KR102376774B1 (ko) | 2022-03-21 |
| CN108289579B (zh) | 2021-02-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20170059182A (ko) | 휠 조립체 및 이를 갖춘 로봇 청소기 | |
| JP7115166B2 (ja) | 掃除ロボットの掃除機 | |
| KR20160037923A (ko) | 자동 청소기 | |
| US10631694B2 (en) | Autonomous cleaner | |
| KR101291202B1 (ko) | 업라이트형 진공청소기 | |
| KR101660987B1 (ko) | 업라이트형 진공 청소기 | |
| JP2015128973A (ja) | 移動体 | |
| JP6707362B2 (ja) | 自律型電気掃除機 | |
| CN1968634B (zh) | 设备,尤其是可移动的吸尘器和这种设备的滚轮 | |
| CN114794990B (zh) | 清洁设备 | |
| KR101457959B1 (ko) | 로봇청소기의 흡입구 지지장치 | |
| KR100664061B1 (ko) | 턱등반장치를 구비한 로봇 | |
| KR20220044317A (ko) | 로봇 청소기 | |
| CN216535094U (zh) | 一种表面清洁装置 | |
| CN114727733B (zh) | 机器人真空清洁器 | |
| JP5638157B1 (ja) | 自走式モップ保持機 | |
| CN223208331U (zh) | 自主移动式表面清洁机器人 | |
| EP4023128A1 (en) | Robotic cleaner | |
| KR102280194B1 (ko) | 로봇 청소기 | |
| CN223994857U (zh) | 一种万向轮装置及清洁设备 | |
| KR20220002693A (ko) | 로봇 청소기 | |
| KR102286412B1 (ko) | 전기 청소기 | |
| JP2022147410A (ja) | ロボットクリーナ | |
| KR20250125396A (ko) | 자동 청소 장치 | |
| KR20050068140A (ko) | 로봇 청소기의 구동바퀴 조립체 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
St.27 status event code: A-0-1-A10-A12-nap-PA0109 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-2-2-P10-P22-nap-X000 |
|
| A201 | Request for examination | ||
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| D13-X000 | Search requested |
St.27 status event code: A-1-2-D10-D13-srh-X000 |
|
| D14-X000 | Search report completed |
St.27 status event code: A-1-2-D10-D14-srh-X000 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| E13-X000 | Pre-grant limitation requested |
St.27 status event code: A-2-3-E10-E13-lim-X000 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U11-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 4 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 5 |
|
| U11 | Full renewal or maintenance fee paid |
Free format text: ST27 STATUS EVENT CODE: A-4-4-U10-U11-OTH-PR1001 (AS PROVIDED BY THE NATIONAL OFFICE) Year of fee payment: 5 |