KR20170063610A - 다평면의 가변형상 지그재그 절단 접이식 드릴 시스템 - Google Patents
다평면의 가변형상 지그재그 절단 접이식 드릴 시스템 Download PDFInfo
- Publication number
- KR20170063610A KR20170063610A KR1020177007923A KR20177007923A KR20170063610A KR 20170063610 A KR20170063610 A KR 20170063610A KR 1020177007923 A KR1020177007923 A KR 1020177007923A KR 20177007923 A KR20177007923 A KR 20177007923A KR 20170063610 A KR20170063610 A KR 20170063610A
- Authority
- KR
- South Korea
- Prior art keywords
- drill
- foldable
- user
- cutting
- plane
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000005553 drilling Methods 0.000 title claims description 4
- 238000005520 cutting process Methods 0.000 claims description 89
- 230000003287 optical effect Effects 0.000 claims description 35
- 239000012530 fluid Substances 0.000 claims description 30
- 238000000034 method Methods 0.000 claims description 28
- 210000001562 sternum Anatomy 0.000 claims description 28
- 230000033001 locomotion Effects 0.000 claims description 23
- 230000007246 mechanism Effects 0.000 claims description 21
- 238000001356 surgical procedure Methods 0.000 claims description 20
- 230000008713 feedback mechanism Effects 0.000 claims description 18
- 230000000007 visual effect Effects 0.000 claims description 14
- 238000005259 measurement Methods 0.000 claims description 11
- 239000003550 marker Substances 0.000 claims description 10
- 210000001519 tissue Anatomy 0.000 claims description 6
- 238000004891 communication Methods 0.000 claims description 5
- 210000003127 knee Anatomy 0.000 claims description 5
- 210000000115 thoracic cavity Anatomy 0.000 claims description 5
- 230000008520 organization Effects 0.000 claims description 2
- 238000013150 knee replacement Methods 0.000 claims 1
- 230000000451 tissue damage Effects 0.000 claims 1
- 231100000827 tissue damage Toxicity 0.000 claims 1
- 210000000988 bone and bone Anatomy 0.000 description 15
- 210000003484 anatomy Anatomy 0.000 description 13
- 230000008859 change Effects 0.000 description 13
- 230000008901 benefit Effects 0.000 description 6
- 210000002683 foot Anatomy 0.000 description 6
- 239000000463 material Substances 0.000 description 5
- 230000008569 process Effects 0.000 description 5
- 239000007943 implant Substances 0.000 description 4
- 210000004872 soft tissue Anatomy 0.000 description 4
- 238000011883 total knee arthroplasty Methods 0.000 description 4
- 210000003811 finger Anatomy 0.000 description 3
- 239000011521 glass Substances 0.000 description 3
- 230000010354 integration Effects 0.000 description 3
- 238000004659 sterilization and disinfection Methods 0.000 description 3
- 238000013519 translation Methods 0.000 description 3
- 210000000689 upper leg Anatomy 0.000 description 3
- 238000011882 arthroplasty Methods 0.000 description 2
- 230000004888 barrier function Effects 0.000 description 2
- 238000007675 cardiac surgery Methods 0.000 description 2
- 150000001875 compounds Chemical class 0.000 description 2
- 238000010276 construction Methods 0.000 description 2
- 238000013461 design Methods 0.000 description 2
- 238000001914 filtration Methods 0.000 description 2
- 230000006870 function Effects 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 230000001954 sterilising effect Effects 0.000 description 2
- 210000002303 tibia Anatomy 0.000 description 2
- MFRCZYUUKMFJQJ-UHFFFAOYSA-N 1,4-dioxane-2,5-dione;1,3-dioxan-2-one Chemical compound O=C1OCCCO1.O=C1COC(=O)CO1 MFRCZYUUKMFJQJ-UHFFFAOYSA-N 0.000 description 1
- 208000035874 Excoriation Diseases 0.000 description 1
- 206010028980 Neoplasm Diseases 0.000 description 1
- FAPWRFPIFSIZLT-UHFFFAOYSA-M Sodium chloride Chemical compound [Na+].[Cl-] FAPWRFPIFSIZLT-UHFFFAOYSA-M 0.000 description 1
- 208000002847 Surgical Wound Diseases 0.000 description 1
- 230000004075 alteration Effects 0.000 description 1
- 238000004873 anchoring Methods 0.000 description 1
- 210000003423 ankle Anatomy 0.000 description 1
- 239000003242 anti bacterial agent Substances 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000000712 assembly Effects 0.000 description 1
- 238000000429 assembly Methods 0.000 description 1
- 230000009286 beneficial effect Effects 0.000 description 1
- 230000003115 biocidal effect Effects 0.000 description 1
- 239000000560 biocompatible material Substances 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 230000037182 bone density Effects 0.000 description 1
- 210000005013 brain tissue Anatomy 0.000 description 1
- 230000000747 cardiac effect Effects 0.000 description 1
- 238000002316 cosmetic surgery Methods 0.000 description 1
- 238000007428 craniotomy Methods 0.000 description 1
- 230000000994 depressogenic effect Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 238000002224 dissection Methods 0.000 description 1
- 239000012636 effector Substances 0.000 description 1
- 238000002594 fluoroscopy Methods 0.000 description 1
- 210000005224 forefinger Anatomy 0.000 description 1
- 230000004927 fusion Effects 0.000 description 1
- 210000004247 hand Anatomy 0.000 description 1
- 230000035876 healing Effects 0.000 description 1
- 208000015181 infectious disease Diseases 0.000 description 1
- 208000014674 injury Diseases 0.000 description 1
- 238000007689 inspection Methods 0.000 description 1
- 230000003993 interaction Effects 0.000 description 1
- 230000001788 irregular Effects 0.000 description 1
- 230000002262 irrigation Effects 0.000 description 1
- 238000003973 irrigation Methods 0.000 description 1
- 210000000629 knee joint Anatomy 0.000 description 1
- 238000003698 laser cutting Methods 0.000 description 1
- HLXZNVUGXRDIFK-UHFFFAOYSA-N nickel titanium Chemical compound [Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni] HLXZNVUGXRDIFK-UHFFFAOYSA-N 0.000 description 1
- 229910001000 nickel titanium Inorganic materials 0.000 description 1
- 230000000399 orthopedic effect Effects 0.000 description 1
- 239000002504 physiological saline solution Substances 0.000 description 1
- 230000005855 radiation Effects 0.000 description 1
- 238000011160 research Methods 0.000 description 1
- 230000029058 respiratory gaseous exchange Effects 0.000 description 1
- 239000000523 sample Substances 0.000 description 1
- 238000007789 sealing Methods 0.000 description 1
- 238000004088 simulation Methods 0.000 description 1
- 210000003625 skull Anatomy 0.000 description 1
- 230000006641 stabilisation Effects 0.000 description 1
- 238000011105 stabilization Methods 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
- 210000004233 talus Anatomy 0.000 description 1
- 210000003813 thumb Anatomy 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
- 230000008733 trauma Effects 0.000 description 1
- 238000003466 welding Methods 0.000 description 1
- 239000002023 wood Substances 0.000 description 1
Images







Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/16—Instruments for performing osteoclasis; Drills or chisels for bones; Trepans
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/16—Instruments for performing osteoclasis; Drills or chisels for bones; Trepans
- A61B17/1613—Component parts
- A61B17/1622—Drill handpieces
- A61B17/1624—Drive mechanisms therefor
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/16—Instruments for performing osteoclasis; Drills or chisels for bones; Trepans
- A61B17/1613—Component parts
- A61B17/1626—Control means; Display units
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/16—Instruments for performing osteoclasis; Drills or chisels for bones; Trepans
- A61B17/1662—Instruments for performing osteoclasis; Drills or chisels for bones; Trepans for particular parts of the body
- A61B17/1691—Instruments for performing osteoclasis; Drills or chisels for bones; Trepans for particular parts of the body for the sternum
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B2017/00743—Type of operation; Specification of treatment sites
- A61B2017/00796—Breast surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2048—Tracking techniques using an accelerometer or inertia sensor
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2055—Optical tracking systems
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2065—Tracking using image or pattern recognition
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/30—Devices for illuminating a surgical field, the devices having an interrelation with other surgical devices or with a surgical procedure
- A61B2090/309—Devices for illuminating a surgical field, the devices having an interrelation with other surgical devices or with a surgical procedure using white LEDs
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/39—Markers, e.g. radio-opaque or breast lesions markers
- A61B2090/3937—Visible markers
- A61B2090/3945—Active visible markers, e.g. light emitting diodes
Landscapes
- Health & Medical Sciences (AREA)
- Surgery (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- General Health & Medical Sciences (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Dentistry (AREA)
- Orthopedic Medicine & Surgery (AREA)
- Pathology (AREA)
- Robotics (AREA)
- Surgical Instruments (AREA)
Abstract
Description
도 1은 본 발명에 의해 만들어진 다양한 예시적인 삼각파 절단 패턴들을 도시한다.
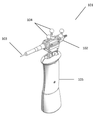
도 2는 접이식 손-파지 드릴 (articulating hand-held drill)의 사시도를 나타낸다.
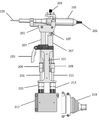
도 3은 접이식 손-파지 드릴의 상세도를 나타낸다.
도 4는 2-자유도(degrees of freedom)로 접히는 드릴 부분을 도시한다.
도 5는 접이식 손-파지 드릴의 엑츄에이터들과 드릴 부분 사이의 하나의 제안된 연결을 도시한다.
도 6은 본 발명의 시스템을 사용하여 생성될 수 있는 예시적인 절단 다평면 경로를 도시한다.
도 7은 손 파지 드릴 시스템의 바람직한 구성을 도시한다.
도 8은 손 파지 드릴 시스템을 위한 외부 하드웨어 및 컨트롤러들의 개략도를 나타낸다.
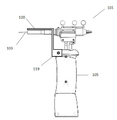
도 9는 부착 가능한 기준 가이드들을 구비한 접이식 손 파지 드릴을 도시한다.
도 10은 손 파지 드릴 시스템의 선형 레일 베어링 메커니즘의 상세도를 나타낸다.
Claims (47)
- 접이식 드릴 시스템으로서,
손 파지 부분;
드릴 부분;
상기 드릴 부분의 적어도 2개의 축들을 제어하기 위한 적어도 2개의 엑츄에이터들; 및
상기 적어도 2개의 엑츄에이터들을 제어하기 위한 내비게이션 시스템을 포함하는 접이식 드릴 시스템. - 제1항에 있어서, 상기 적어도 2개의 엑츄에이터들은 상기 드릴 부분이 적어도 하나의 운동 고정 평면에서 작동되는 것을 가능하게 하는 접이식 드릴 시스템.
- 제1항 또는 제2항에 있어서, 상기 드릴 부분은 적어도 3 자유도로 작동하도록 적어도 3개의 축들을 가지는 접이식 드릴 시스템.
- 제1항 또는 제2항에 있어서, 상기 드릴 부분은 4 자유도로 작동하도록 적어도 4개의 축들을 가지는 접이식 드릴 시스템.
- 제1항에 있어서, 상기 내비게이션 시스템은 적어도 하나의 광 마커와 적어도 하나의 광 수신기를 포함하는 접이식 드릴 시스템.
- 제5항에 있어서, 상기 광 마커는 반사 마커들인 접이식 드릴 시스템.
- 제5항에 있어서, 상기 광 마커는 능동형 마커들인 접이식 드릴 시스템.
- 제7항에 있어서, 상기 능동형 마커들은 발광 다이오들인 접이식 드릴 시스템.
- 제1항에 있어서, 상기 내비게이션 시스템은 관성 측정 유닛들을 추가로 포함하는 접이식 드릴 시스템.
- 제1항에 있어서, 상기 드릴 부분은 조직과 상호 작용하는 공구를 추가로 포함하는 접이식 드릴 시스템.
- 제10항에 있어서, 상기 공구는 드릴 비트, 톱 또는 버(bur)인 접이식 드릴 시스템.
- 제10항에 있어서, 상기 공구는 상기 조직에 시각적 표시들을 만드는 접이식 드릴 시스템.
- 제10항에 있어서, 상기 공구는 디지털화 및/또는 표기를 위하여 조직에 특정 구역들을 표시하는 접이식 드릴 시스템.
- 제1항에 있어서, 상기 드릴 부분은 드릴 가드를 추가로 포함하며, 상기 드릴 가드는 절단 평면의 밑면에서 진행하여, 상기 드릴 가드 아래의 임의의 표면들을 드릴이 절단하는 것을 방지하는 접이식 드릴 시스템.
- 제10항에 있어서, 상기 공구는 상기 공구의 팁에 있는 드릴 가드를 추가로 포함하며, 상기 드릴 가드는 절단 평면의 밑면에서 진행하여, 상기 드릴 가드 아래의 임의의 표면들을 드릴이 절단하는 것을 방지하는 접이식 드릴 시스템.
- 제15항에 있어서, 상기 드릴 가드는 제2 구체 내에 있는 구체이며, 상기 구체는 조직 손상을 최소화하도록 상기 공구보다 낮은 속도로 회전하는 접이식 드릴 시스템.
- 제1항에 있어서, 상기 내비게이션 시스템은 상기 드릴 부분의 위치, 배향, 또는 속도 중 하나에 대한 실시간 피드백을 제공하는 접이식 드릴 시스템.
- 제17항에 있어서, 상기 실시간 피드백은, 표면 움직임을 보완하도록 상기 적어도 2개의 엑츄에이터들을 조정하기 위해 컨트롤러에 의해 사용되도록 디바이스가 작동됨에 따라서 상기 드릴 부분에 표면을 관련시키는 정보를 제공하는 접이식 드릴 시스템.
- 제17항에 있어서, 상기 실시간 피드백은, 상기 손 파지 부분의 사용자의 움직임을 보완하도록 상기 적어도 2개의 엑츄에이터들을 조정하기 위해 컨트롤러에 의해 사용되도록 디바이스가 작동됨에 따라서 상기 드릴 부분에 표면을 관련시키는 정보를 제공하는 접이식 드릴 시스템.
- 제17항에 있어서, 상기 실시간 피드백은, 사전 표시된 패턴을 벗어난 상기 디바이스의 작동을 방지하도록 상기 적어도 2개의 엑츄에이터들을 조정하기 위하여 컨트롤러에 의해 사용되도록 디바이스가 작동됨에 따라서 상기 드릴 부분에 표면을 관련시키는 정보를 제공하는 접이식 드릴 시스템.
- 제1항에 있어서, 상기 드릴 부분은 상기 손 파지 부분의 위치 및 배향에 관계없이 상기 내비게이션 시스템에 의해 추적되는 접이식 드릴 시스템.
- 제1항에 있어서, 사전 표시된 패턴은 사용자 지정 목표 지점들에 상기 드릴 부분을 접촉시키는 것에 의해 드릴의 작동 전에 기록되는 접이식 드릴 시스템.
- 제10항에 있어서, 사전 표시된 패턴은 사용자 지정 목표 지점들에 상기 공구 팁을 접촉시키는 것에 의해 드릴의 작동 전에 기록되는 접이식 드릴 시스템.
- 제1항에 있어서, 사용자 피드백 메커니즘을 추가로 포함하는 접이식 드릴 시스템.
- 제24항에 있어서, 상기 사용자 피드백 메커니즘은 트리거 또는 풋 페달인 접이식 드릴 시스템.
- 제24항에 있어서, 상기 사용자 피드백 메커니즘은 새로운 운동 고정 평면이 필요하다는 것을 상기 내비게이션 시스템과 드릴에 통신하도록 사용자에 의해 활성화되는 접이식 드릴 시스템.
- 제24항에 있어서, 상기 사용자 피드백 메커니즘은 상기 공구의 속도를 제어하는 접이식 드릴 시스템.
- 제1항에 있어서, 상기 손 파지 부분은 상기 드릴 부분의 평면에 대한 기준 가이드의 평면 사이의 시각적 관계를 사용자에게 제공하는 강성 기준 가이드를 부착하기 위한 어댑터를 포함하는 접이식 드릴 시스템.
- 제28항에 있어서, 상기 부착 가능한 기준 가이드는 유체의 평면에 의해 표시되는 접이식 드릴 시스템.
- 제28항에 있어서, 상기 기준 가이드를 조명하는 광원을 추가로 포함하는 접이식 드릴 시스템.
- 제1항에 있어서, 상기 적어도 2개의 엑츄에이터들은 선형 엑츄에이터를 포함하는 접이식 드릴 시스템.
- 제1항에 있어서, 사용자에 대한 피드백 단서를 추가로 포함하는 접이식 드릴 시스템.
- 제32항에 있어서, 상기 피드백 단서는 시각적 및/또는 청각적인 접이식 드릴 시스템.
- 제32항에 있어서, 상기 피드백 단서는 위치 또는 배향으로 사용자를 가이드하거나 유지하는 것을 돕는 촉각 및/또는 햅틱인 접이식 드릴 시스템.
- 제1항에 있어서, 상기 적어도 2개의 엑츄에이터들과 통신하고 상기 드릴 부분에 부착되는 적어도 2개의 강성 물체들을 추가로 포함하는 접이식 드릴 시스템.
- 제35항에 있어서, 상기 강성 물체들 중 적어도 하나는 상기 드릴 부분이 회전하는 것을 허용하도록 상기 드릴 부분에 부착되는 접이식 드릴 시스템.
- 제36항에 있어서, 상기 부착물은 상기 드릴 부분 상의 슬롯 내에 있는 베어링인 접이식 드릴 시스템.
- 제36항에 있어서, 상기 강성 물체는 상기 드릴 부분에 부착되는 힌지 메커니즘인 접이식 드릴 시스템.
- 제1항의 시스템을 사용하여 ± 1.0 ㎜ 및 ± 1.0°편차 내에서 또는 더욱 양호한 선형 절단을 만들기 위한 방법.
- 제39항에 있어서, 상기 선형 절단은 제1항의 시스템을 사용하여 사용자에 의해 한정된 한 세트의 선형 절단들 중 일부인 방법.
- 제39항에 있어서, 상기 선형 절단은 사용자에 의해 수술 전에 계획되고 제1항의 시스템에 의해 실행되는 한 세트의 선형 절단들 중 일부인 방법.
- 제39항에 있어서, 상기 선형 절단은 제1항의 시스템을 사용하여 사용자에 의해 수술 중에 계획되고 제1항의 시스템에 의해 실행되는 한 세트의 선형 절단들 중 일부인 방법.
- 제39항에 있어서, 상기 선형 절단은 무릎 관절 교체 수술을 위한 일련의 평면 절단들 중 일부인 방법.
- 제39항에 있어서, 상기 선형 절단은 무릎 관절 표면 처리 수술(knee resurfacing surgery)을 위한 일련의 평면 절단들 중 일부인 방법.
- 제39항에 있어서, 상기 선형 절단은 무릎 관절 재수술(knee revision surgery)을 위한 일련의 평면 절단들 중 일부인 방법.
- 제39항에 있어서, 상기 선형 절단은 제1항의 시스템을 사용하여 "삼각파 패턴"으로 흉부 수술을 위한 흉골에서의 절단인 방법.
- 제39항에 있어서, 상기 선형 절단은 제1항의 시스템을 사용하여 흉골의 전방을 "삼각파 패턴"으로 절단하고, 흉골의 후방을 직선 절단하는 방법.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020237006747A KR20230034432A (ko) | 2014-09-23 | 2015-09-23 | 다평면의 가변형상 지그재그 절단 접이식 드릴 시스템 |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201462054009P | 2014-09-23 | 2014-09-23 | |
| US62/054,009 | 2014-09-23 | ||
| PCT/US2015/051713 WO2016049180A1 (en) | 2014-09-23 | 2015-09-23 | Multi-planar variable geometry zigzag cut articulating drilling system |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020237006747A Division KR20230034432A (ko) | 2014-09-23 | 2015-09-23 | 다평면의 가변형상 지그재그 절단 접이식 드릴 시스템 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20170063610A true KR20170063610A (ko) | 2017-06-08 |
| KR102511541B1 KR102511541B1 (ko) | 2023-03-16 |
Family
ID=55581949
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020177007923A Active KR102511541B1 (ko) | 2014-09-23 | 2015-09-23 | 다평면의 가변형상 지그재그 절단 접이식 드릴 시스템 |
| KR1020237006747A Ceased KR20230034432A (ko) | 2014-09-23 | 2015-09-23 | 다평면의 가변형상 지그재그 절단 접이식 드릴 시스템 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020237006747A Ceased KR20230034432A (ko) | 2014-09-23 | 2015-09-23 | 다평면의 가변형상 지그재그 절단 접이식 드릴 시스템 |
Country Status (7)
| Country | Link |
|---|---|
| US (3) | US10492870B2 (ko) |
| EP (1) | EP3197375B1 (ko) |
| JP (3) | JP2017528255A (ko) |
| KR (2) | KR102511541B1 (ko) |
| CN (1) | CN107072674A (ko) |
| AU (4) | AU2015320736B2 (ko) |
| WO (1) | WO2016049180A1 (ko) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20230167776A (ko) * | 2022-06-02 | 2023-12-12 | 동국대학교 산학협력단 | 수술 도구, 네비게이션 수술 장치 및 네비게이션 수술 장치의 동작 방법 |
Families Citing this family (70)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3656317A1 (en) | 2011-09-02 | 2020-05-27 | Stryker Corporation | Surgical system including an instrument and method for using the instrument |
| US10874466B2 (en) | 2012-06-21 | 2020-12-29 | Globus Medical, Inc. | System and method for surgical tool insertion using multiaxis force and moment feedback |
| US11896446B2 (en) | 2012-06-21 | 2024-02-13 | Globus Medical, Inc | Surgical robotic automation with tracking markers |
| US11974822B2 (en) | 2012-06-21 | 2024-05-07 | Globus Medical Inc. | Method for a surveillance marker in robotic-assisted surgery |
| US11298196B2 (en) | 2012-06-21 | 2022-04-12 | Globus Medical Inc. | Surgical robotic automation with tracking markers and controlled tool advancement |
| US11857149B2 (en) | 2012-06-21 | 2024-01-02 | Globus Medical, Inc. | Surgical robotic systems with target trajectory deviation monitoring and related methods |
| US11963755B2 (en) | 2012-06-21 | 2024-04-23 | Globus Medical Inc. | Apparatus for recording probe movement |
| US11045267B2 (en) | 2012-06-21 | 2021-06-29 | Globus Medical, Inc. | Surgical robotic automation with tracking markers |
| US10758315B2 (en) | 2012-06-21 | 2020-09-01 | Globus Medical Inc. | Method and system for improving 2D-3D registration convergence |
| US11857266B2 (en) | 2012-06-21 | 2024-01-02 | Globus Medical, Inc. | System for a surveillance marker in robotic-assisted surgery |
| US11864839B2 (en) | 2012-06-21 | 2024-01-09 | Globus Medical Inc. | Methods of adjusting a virtual implant and related surgical navigation systems |
| US12133699B2 (en) | 2012-06-21 | 2024-11-05 | Globus Medical, Inc. | System and method for surgical tool insertion using multiaxis force and moment feedback |
| US12594001B2 (en) | 2012-06-21 | 2026-04-07 | Globus Medical, Inc. | Apparatus for recording probe movement |
| US12004905B2 (en) | 2012-06-21 | 2024-06-11 | Globus Medical, Inc. | Medical imaging systems using robotic actuators and related methods |
| US11864745B2 (en) | 2012-06-21 | 2024-01-09 | Globus Medical, Inc. | Surgical robotic system with retractor |
| US10368878B2 (en) | 2013-06-11 | 2019-08-06 | Orthotaxy | System for positioning a surgical device |
| US10507063B2 (en) | 2014-11-21 | 2019-12-17 | Think Surgical, Inc. | Visible light communication system for transmitting data between visual tracking systems and tracking markers |
| AU2015360839B2 (en) | 2014-12-08 | 2019-09-12 | Think Surgical, Inc. | Implant based planning, digitizing, and registration for total joint arthroplasty |
| US10932866B1 (en) | 2014-12-08 | 2021-03-02 | Think Surgical, Inc. | Implant based planning, digitizing, and registration for total joint arthroplasty |
| AU2016225968B2 (en) | 2015-03-05 | 2020-07-23 | Think Surgical, Inc. | Methods for locating and tracking a tool axis |
| US12376912B2 (en) | 2015-03-05 | 2025-08-05 | Think Surgical, Inc. | Methods for locating and tracking a tool axis |
| WO2017087371A1 (en) | 2015-11-16 | 2017-05-26 | Think Surgical, Inc. | Method for confirming registration of tracked bones |
| US12527633B2 (en) | 2015-11-16 | 2026-01-20 | Think Surgical, Inc. | Method for confirming registration of tracked bones |
| US10405929B1 (en) * | 2015-11-18 | 2019-09-10 | Bradley S. Seltmann | Attachment mechanism for surgical tool tracking system |
| US12220137B2 (en) | 2015-11-24 | 2025-02-11 | Think Surgical, Inc. | Cut guide for arthroplasty procedures |
| AU2016359274A1 (en) | 2015-11-24 | 2018-04-12 | Think Surgical, Inc. | Active robotic pin placement in total knee arthroplasty |
| US12178532B2 (en) | 2015-11-24 | 2024-12-31 | Think Surgical, Inc. | Robotic alignment of a tool or pin with a virtual plane |
| US12082893B2 (en) | 2015-11-24 | 2024-09-10 | Think Surgical, Inc. | Robotic pin placement |
| US11883217B2 (en) | 2016-02-03 | 2024-01-30 | Globus Medical, Inc. | Portable medical imaging system and method |
| WO2017151751A1 (en) | 2016-03-02 | 2017-09-08 | Think Surgical, Inc. | Method for recovering a registration of a bone |
| EA036632B1 (ru) * | 2016-06-22 | 2020-12-02 | Эдванст Остеотоми Тулз - Эот Аг | Лазерный стернотом |
| US20180056496A1 (en) * | 2016-08-26 | 2018-03-01 | Robert Bosch Tool Corporation | Modular Handheld Power Tool |
| WO2018112025A1 (en) | 2016-12-16 | 2018-06-21 | Mako Surgical Corp. | Techniques for modifying tool operation in a surgical robotic system based on comparing actual and commanded states of the tool relative to a surgical site |
| US10772685B2 (en) | 2017-01-16 | 2020-09-15 | Think Surgical, Inc. | System and method for bone re-registration and marker installation |
| CA3055819A1 (en) * | 2017-03-08 | 2018-09-13 | The Trustees Of Dartmouth College | Electrical impedance sensing dental drill system configured to detect cancellous-cortical bone and bone-soft tissue boundaries |
| WO2018175172A1 (en) * | 2017-03-21 | 2018-09-27 | Think Surgical, Inc. | Two degree of freedom system and method for spinal applications |
| EP3614931B1 (en) | 2017-04-28 | 2025-11-19 | Stryker Corporation | System and method for indicating mapping of console-based surgical systems |
| KR101968296B1 (ko) * | 2017-05-11 | 2019-04-11 | (주)신영하이테크 | 드릴 지그 장치 |
| IT201700057066A1 (it) | 2017-05-25 | 2018-11-25 | St Microelectronics Srl | Sistema di elaborazione implementante un algoritmo per la fusione di dati da sensori inerziali, e metodo |
| US11027432B2 (en) | 2017-09-06 | 2021-06-08 | Stryker Corporation | Techniques for controlling position of an end effector of a robotic device relative to a virtual constraint |
| WO2019140533A1 (en) * | 2018-01-22 | 2019-07-25 | Claronav Inc. | Robotic surgical tool |
| WO2019200154A1 (en) * | 2018-04-13 | 2019-10-17 | Think Surgical, Inc. | A rollable digitizer for computer-assisted surgery |
| US11484381B2 (en) * | 2018-06-21 | 2022-11-01 | Ruthless, LLC | Instrument alignment feedback system and method |
| CN110742673B (zh) * | 2018-07-24 | 2021-03-16 | 上海库欣医疗科技有限公司 | 一种电动骨钻 |
| CN109498102B (zh) * | 2018-12-07 | 2024-03-26 | 北京天智航医疗科技股份有限公司 | 测深装置及磨削装置 |
| EP3747389A1 (en) * | 2019-06-05 | 2020-12-09 | Globus Medical, Inc. | Surgical robotic automation with tracking markers |
| US12232744B2 (en) | 2019-07-15 | 2025-02-25 | Stryker Corporation | Robotic hand-held surgical instrument systems and methods |
| WO2021072061A1 (en) | 2019-10-08 | 2021-04-15 | Spindle Karlton E | Instrument handle for use with instrument alignment feedback system and method |
| US11407098B2 (en) | 2019-11-26 | 2022-08-09 | Stmicroelectronics S.R.L. | Smart push button device utilizing MEMS sensors |
| JP2023505164A (ja) | 2019-12-02 | 2023-02-08 | シンク サージカル, インコーポレイテッド | 医療処置を施行するために道具を軸と整列させるためのシステム及び方法 |
| JP2023512760A (ja) * | 2020-02-04 | 2023-03-29 | マコ サージカル コーポレーション | 視覚インジケータを備える手持ち式ロボット手術器具システム及びそれを制御する方法 |
| CN113608576B (zh) | 2020-05-05 | 2024-06-25 | 意法半导体股份有限公司 | 电子装置控制方法、其电子装置和软件产品 |
| IT202000009937A1 (it) | 2020-05-05 | 2021-11-05 | St Microelectronics Srl | Metodo di controllo di un apparecchio elettronico eseguito tramite il calcolo di un angolo di apertura, relativo apparecchio elettronico e prodotto software |
| CN111938744A (zh) * | 2020-08-19 | 2020-11-17 | 黄丽娟 | 医疗钻孔设备及其设用方法 |
| US20230255701A1 (en) * | 2020-09-08 | 2023-08-17 | Mako Surgical Corp. | Systems And Methods For Guiding Movement Of A Handheld Medical Robotic Instrument |
| US12533805B2 (en) | 2020-10-30 | 2026-01-27 | Mako Surgical Corp. | Robotic surgical system with cut selection logic |
| AU2021376224A1 (en) | 2020-11-06 | 2023-06-22 | Stryker Corporation | Robotic hand-held surgical instrument systems and methods |
| US12527632B2 (en) | 2020-12-15 | 2026-01-20 | Mako Surgical Corp. | Systems and methods for initial assessment warnings |
| WO2022159568A1 (en) * | 2021-01-20 | 2022-07-28 | Mako Surgical Corp. | Robotic hand-held surgical instrument systems and methods |
| CN115337071B (zh) * | 2021-05-12 | 2025-05-27 | 炳硕生医(新加坡)私人有限公司 | 手术电钻及骨科手术系统 |
| CN116784928B (zh) * | 2021-07-16 | 2025-12-12 | 深圳市鑫君特智能医疗器械有限公司 | 一种骨科置钉装置及骨科置入手术操作系统 |
| CN117545437A (zh) * | 2021-07-19 | 2024-02-09 | 史密夫和内修有限公司 | 手术切除装置和手术计算装置 |
| USD1044829S1 (en) | 2021-07-29 | 2024-10-01 | Mako Surgical Corp. | Display screen or portion thereof with graphical user interface |
| EP4465915A2 (en) * | 2022-01-20 | 2024-11-27 | MAKO Surgical Corp. | Robotic hand-held surgical system |
| US12146894B2 (en) | 2022-05-27 | 2024-11-19 | Stmicroelectronics S.R.L. | Lid angle detection |
| US12259760B2 (en) | 2022-05-27 | 2025-03-25 | Stmicroelectronics S.R.L. | Lid angle detection |
| WO2025010213A2 (en) | 2023-07-01 | 2025-01-09 | Innovations 4 Surgery, LLC | Medical cutting and drill devices having static components, retractable sheaths, sensors, navigation components, working blade bodies, rails, struts, channels for fluid and gas flow, hand-piece, robotic arm attachment capabilities, computing devices, and associated feedbacks and outputs |
| GB2638678A (en) * | 2024-02-26 | 2025-09-03 | Norwegian Univ Sci & Tech Ntnu | A method and apparatus for monitoring a surgical intervention device |
| EP4649911A3 (de) | 2024-04-26 | 2026-01-14 | Universität des Saarlandes | Stationäre medizinische resektionsvorrichtung zur maschinengeführten bestimmung eines oberflächenverlaufs einer oberfläche von zu resezierendem gewebe |
| CN118806443B (zh) * | 2024-05-11 | 2025-09-16 | 北京天智航医疗科技股份有限公司 | 一种手持前端及控制方法 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20050165420A1 (en) * | 2003-12-19 | 2005-07-28 | Cha Charles W. | Dissecting high speed burr for spinal surgery |
| US7035716B2 (en) * | 2001-01-29 | 2006-04-25 | The Acrobot Company Limited | Active-constraint robots |
| US20110130761A1 (en) * | 2005-04-07 | 2011-06-02 | Perception Raisonnement Action En Medecine | Robotic guide assembly for use in computer-aided surgery |
| US20130060278A1 (en) * | 2011-09-02 | 2013-03-07 | Stryker Corporation | Surgical instrument including housing, a cutting accessory that extends from the housing and actuators that establish the position of the cutting accessory relative to the housing |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0467836A (ja) * | 1990-07-09 | 1992-03-03 | Nec San-Ei Instr Co Ltd | テレメータ |
| WO2000030557A1 (en) | 1998-11-23 | 2000-06-02 | Microdexterity Systems, Inc. | Surgical manipulator |
| JP2001074826A (ja) * | 1999-09-08 | 2001-03-23 | Casio Comput Co Ltd | 測位システム |
| DE10239673A1 (de) | 2002-08-26 | 2004-03-11 | Markus Schwarz | Vorrichtung zur Bearbeitung von Teilen |
| US20050053199A1 (en) * | 2003-09-04 | 2005-03-10 | Miles Dale A. | Portable x-ray device and method |
| CA2826925C (en) * | 2005-02-22 | 2017-01-24 | Mako Surgical Corp. | Haptic guidance system and method |
| WO2007014470A2 (en) | 2005-08-01 | 2007-02-08 | Resonant Medical Inc. | System and method for detecting drifts in calibrated tracking systems |
| US8876830B2 (en) | 2009-08-13 | 2014-11-04 | Zimmer, Inc. | Virtual implant placement in the OR |
| CA2770507C (en) * | 2009-08-17 | 2019-01-08 | Mazor Robotics Ltd. | Device for improving the accuracy of manual operations |
| US9341704B2 (en) | 2010-04-13 | 2016-05-17 | Frederic Picard | Methods and systems for object tracking |
| CN102892352A (zh) * | 2010-04-22 | 2013-01-23 | 蓝带技术有限责任公司 | 被导航徒手外科手术工具和工具包 |
| US9060794B2 (en) | 2011-10-18 | 2015-06-23 | Mako Surgical Corp. | System and method for robotic surgery |
| CN108175503B (zh) * | 2013-03-13 | 2022-03-18 | 史赛克公司 | 用于在外科程序的准备中布置手术室中的对象的系统 |
| TWI548388B (zh) | 2013-12-30 | 2016-09-11 | 國立臺灣大學 | 骨科手術之手持式機器人以及其控制方法 |
-
2015
- 2015-09-23 KR KR1020177007923A patent/KR102511541B1/ko active Active
- 2015-09-23 AU AU2015320736A patent/AU2015320736B2/en active Active
- 2015-09-23 US US15/512,180 patent/US10492870B2/en active Active
- 2015-09-23 CN CN201580051559.XA patent/CN107072674A/zh active Pending
- 2015-09-23 KR KR1020237006747A patent/KR20230034432A/ko not_active Ceased
- 2015-09-23 JP JP2017515687A patent/JP2017528255A/ja not_active Withdrawn
- 2015-09-23 EP EP15845042.9A patent/EP3197375B1/en active Active
- 2015-09-23 WO PCT/US2015/051713 patent/WO2016049180A1/en not_active Ceased
-
2019
- 2019-10-21 US US16/659,153 patent/US11284946B2/en active Active
-
2020
- 2020-08-31 AU AU2020226980A patent/AU2020226980B2/en active Active
- 2020-09-29 JP JP2020163607A patent/JP2021010745A/ja active Pending
-
2022
- 2022-03-14 US US17/693,765 patent/US20220192761A1/en active Pending
- 2022-06-22 JP JP2022100303A patent/JP2022123109A/ja active Pending
-
2023
- 2023-03-22 AU AU2023201777A patent/AU2023201777B2/en active Active
-
2025
- 2025-07-11 AU AU2025205393A patent/AU2025205393A1/en active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7035716B2 (en) * | 2001-01-29 | 2006-04-25 | The Acrobot Company Limited | Active-constraint robots |
| US20050165420A1 (en) * | 2003-12-19 | 2005-07-28 | Cha Charles W. | Dissecting high speed burr for spinal surgery |
| US20110130761A1 (en) * | 2005-04-07 | 2011-06-02 | Perception Raisonnement Action En Medecine | Robotic guide assembly for use in computer-aided surgery |
| US20130060278A1 (en) * | 2011-09-02 | 2013-03-07 | Stryker Corporation | Surgical instrument including housing, a cutting accessory that extends from the housing and actuators that establish the position of the cutting accessory relative to the housing |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20230167776A (ko) * | 2022-06-02 | 2023-12-12 | 동국대학교 산학협력단 | 수술 도구, 네비게이션 수술 장치 및 네비게이션 수술 장치의 동작 방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2016049180A1 (en) | 2016-03-31 |
| US20200046438A1 (en) | 2020-02-13 |
| AU2023201777A1 (en) | 2023-04-20 |
| EP3197375A4 (en) | 2018-08-01 |
| EP3197375A1 (en) | 2017-08-02 |
| US20170258532A1 (en) | 2017-09-14 |
| CN107072674A (zh) | 2017-08-18 |
| AU2020226980A1 (en) | 2020-09-17 |
| EP3197375B1 (en) | 2025-09-17 |
| AU2015320736A1 (en) | 2017-03-09 |
| US11284946B2 (en) | 2022-03-29 |
| AU2015320736A2 (en) | 2017-05-11 |
| US20220192761A1 (en) | 2022-06-23 |
| JP2022123109A (ja) | 2022-08-23 |
| AU2015320736B2 (en) | 2020-07-02 |
| AU2023201777B2 (en) | 2025-04-17 |
| KR20230034432A (ko) | 2023-03-09 |
| US10492870B2 (en) | 2019-12-03 |
| AU2020226980B2 (en) | 2022-12-22 |
| AU2025205393A1 (en) | 2025-07-31 |
| KR102511541B1 (ko) | 2023-03-16 |
| JP2017528255A (ja) | 2017-09-28 |
| JP2021010745A (ja) | 2021-02-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| AU2023201777B2 (en) | Multi-planar variable geometry zigzag cut articulating drilling system | |
| AU2023223011B2 (en) | Active robotic pin placement | |
| EP3551098B1 (en) | Surgical system for cutting an anatomical structure according to at least one target cutting plane | |
| US11607229B2 (en) | Surgical system for cutting an anatomical structure according to at least one target plane | |
| EP3007636B1 (en) | System for positioning a surgical device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0105 | International application |
Patent event date: 20170322 Patent event code: PA01051R01D Comment text: International Patent Application |
|
| PG1501 | Laying open of application | ||
| A201 | Request for examination | ||
| PA0201 | Request for examination |
Patent event code: PA02012R01D Patent event date: 20200923 Comment text: Request for Examination of Application |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20220428 Patent event code: PE09021S01D |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
Patent event code: PE07011S01D Comment text: Decision to Grant Registration Patent event date: 20221124 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
Comment text: Registration of Establishment Patent event date: 20230314 Patent event code: PR07011E01D |
|
| PR1002 | Payment of registration fee |
Payment date: 20230314 End annual number: 3 Start annual number: 1 |
|
| PG1601 | Publication of registration |