KR20170066049A - 차량, 및 그 제어방법 - Google Patents
차량, 및 그 제어방법 Download PDFInfo
- Publication number
- KR20170066049A KR20170066049A KR1020150172591A KR20150172591A KR20170066049A KR 20170066049 A KR20170066049 A KR 20170066049A KR 1020150172591 A KR1020150172591 A KR 1020150172591A KR 20150172591 A KR20150172591 A KR 20150172591A KR 20170066049 A KR20170066049 A KR 20170066049A
- Authority
- KR
- South Korea
- Prior art keywords
- environment information
- navigation
- vehicle
- message
- information
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000000034 method Methods 0.000 title claims abstract description 37
- 238000011084 recovery Methods 0.000 claims description 16
- 125000004122 cyclic group Chemical group 0.000 claims description 6
- 238000001514 detection method Methods 0.000 claims description 2
- 238000010586 diagram Methods 0.000 description 5
- 210000003195 fascia Anatomy 0.000 description 5
- 230000007613 environmental effect Effects 0.000 description 4
- 230000006870 function Effects 0.000 description 3
- 239000011521 glass Substances 0.000 description 3
- 238000004891 communication Methods 0.000 description 2
- 208000019901 Anxiety disease Diseases 0.000 description 1
- 241001465754 Metazoa Species 0.000 description 1
- 230000036506 anxiety Effects 0.000 description 1
- 230000002146 bilateral effect Effects 0.000 description 1
- 230000003749 cleanliness Effects 0.000 description 1
- 238000012790 confirmation Methods 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 238000007599 discharging Methods 0.000 description 1
- 239000000446 fuel Substances 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- NJPPVKZQTLUDBO-UHFFFAOYSA-N novaluron Chemical compound C1=C(Cl)C(OC(F)(F)C(OC(F)(F)F)F)=CC=C1NC(=O)NC(=O)C1=C(F)C=CC=C1F NJPPVKZQTLUDBO-UHFFFAOYSA-N 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 230000001902 propagating effect Effects 0.000 description 1
- 238000011160 research Methods 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/02—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to ambient conditions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/02—Control of vehicle driving stability
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/28—Wheel speed
-
- B60W2550/402—
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2720/00—Output or target parameters relating to overall vehicle dynamics
- B60W2720/28—Wheel speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2400/00—Special features of vehicle units
- B60Y2400/30—Sensors
- B60Y2400/303—Speed sensors
- B60Y2400/3032—Wheel speed sensors
Landscapes
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- Mathematical Physics (AREA)
- Navigation (AREA)
- Traffic Control Systems (AREA)
Abstract
일 실시예에 따른 차량은, 주행을 위한 회전력을 제공하는 구동부; 미리 정해진 주행 경로 상의 주행 환경 정보를 확인하고, 상기 확인된 주행 환경 정보를 포함하는 메시지를 생성하는 내비게이션; 및 상기 생성된 메시지의 상기 주행 환경 정보가 갱신된 것으로 결정되면, 상기 주행 환경 정보에 기초하여 주행하도록 상기 구동부를 제어하는 제어부; 를 포함하고, 상기 제어부는, 상기 내비게이션이 상기 주행 환경 정보 확인 불능 상태에 진입하면, 상기 진입 시점 이후 생성되는 상기 메시지를 무시하고, 상기 내비게이션이 상기 주행 환경 정보 확인 가능 상태를 회복하면, 상기 회복 시점 직후 생성되는 상기 메시지의 상기 주행 환경 정보에 따라 상기 구동부를 제어할 수 있다.
Description
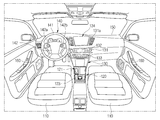
도 2는 일 실시예에 따른 차량의 내부 구성을 나타낸 도면이다.
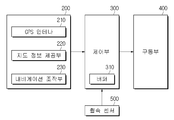
도 3은 일 실시예에 따른 차량의 제어 블록도이다.
도 4는 일 실시예에 따른 차량의 내비게이션 상태에 대한 버퍼에 저장되는 카운터 값을 설명하기 위한 도면이다.
도 5a 및 5b는 여러 가지 실시예에 따른 제어부가 구동부 제어 중단 여부를 결정하는 방법을 설명하기 위한 도면이다.
도 6은 일 실시예에 따른 차량 제어방법의 흐름도이다.
도 7은 다른 실시예에 따른 차량 제어방법의 흐름도이다.
200: 내비게이션
210: GPS 안테나
220: 지도 정보 제공부
230: 내비게이션 조작부
300: 제어부
310: 버퍼
400: 구동부
500: 휠속 센서
Claims (22)
- 주행을 위한 회전력을 제공하는 구동부;
미리 정해진 주행 경로 상의 주행 환경 정보를 확인하고, 상기 확인된 주행 환경 정보를 포함하는 메시지를 생성하는 내비게이션; 및
상기 생성된 메시지의 상기 주행 환경 정보가 갱신된 것으로 결정되면, 상기 주행 환경 정보에 기초하여 주행하도록 상기 구동부를 제어하는 제어부; 를 포함하고,
상기 제어부는,
상기 내비게이션이 상기 주행 환경 정보 확인 불능 상태에 진입하면, 상기 진입 시점 이후 생성되는 상기 메시지를 무시하고,
상기 내비게이션이 상기 주행 환경 정보 확인 가능 상태를 회복하면, 상기 회복 시점 직후 생성되는 상기 메시지의 상기 주행 환경 정보에 따라 상기 구동부를 제어하는 차량. - 제 1 항에 있어서,
상기 내비게이션은,
상기 메시지에 상기 주행 환경 정보 확인 순서에 따라 결정되는 순환식 카운터(Cyclic Counter)를 부가하는 차량. - 제 2 항에 있어서,
상기 제어부는,
제 1 메시지의 상기 주행 환경 정보가 갱신된 것으로 결정되면, 상기 제 1 메시지에 부가된 제 1 카운터를 저장한 후, 제 2 메시지에 부가된 제 2 카운터를 상기 저장된 제 1 카운터와 비교하여 상기 제 2 메시지의 상기 주행 환경 정보가 갱신된 것인지 여부를 결정하는 차량. - 제 3 항에 있어서,
상기 제어부는,
상기 내비게이션이 상기 주행 환경 정보 확인 불능 상태이면, 상기 저장된 제 1 카운터를 무효(Invalid) 값으로 변환하여 저장하는 차량. - 제 4 항에 있어서,
상기 제어부는,
상기 내비게이션이 상기 주행 환경 정보 확인 가능 상태를 회복하면, 상기 저장된 무효 값을 상기 회복 시점 직후 생성된 제 3 메시지에 부가된 제 3 카운터로 변환하여 저장하는 차량. - 제 1 항에 있어서,
상기 제어부는,
상기 내비게이션의 상기 주행 환경 정보 확인 불능 상태 진입 시점에 상기 차량의 위치에 기초하여 상기 구동부 제어의 중단 여부를 결정하는 차량. - 제 6 항에 있어서,
상기 제어부는,
상기 내비게이션의 상기 주행 환경 정보 확인 불능 상태 진입 시점에 상기 차량이 상기 주행 경로 상에 존재하면 상기 구동부의 제어를 유지하는 차량. - 제 7 항에 있어서,
상기 구동부로부터 상기 회전력을 제공받는 차륜의 회전 속도를 감지하는 휠속 센서; 를 더 포함하고,
상기 제어부는,
상기 휠속 센서의 감지 결과를 참조하여 상기 구동부의 제어를 유지하는 차량. - 제 6 항에 있어서,
상기 제어부는,
상기 내비게이션의 상기 주행 환경 정보 확인 불능 상태 진입 시점에 상기 차량이 상기 주행 경로를 이탈하여 존재하면 상기 구동부의 제어를 중단하는 차량. - 제 1 항에 있어서,
상기 내비게이션은,
외부의 입력, 및 상기 차량의 상기 주행 경로 이탈 중 적어도 하나에 따라 상기 주행 환경 정보 확인 불능 상태 또는 상기 주행 환경 정보 확인 가능 상태로 변경됨을 알리는 내비게이션 상태 정보를 상기 제어부로 전송하는 차량. - 제 1 항에 있어서,
상기 내비게이션은,
상기 주행 경로 상의 전방 과속 단속 카메라 정보, 전방 과속 방지턱 정보, 전방 도로 구배 정보, 및 전방 도로 곡률 정보 중 적어도 하나를 포함하는 상기 주행 환경 정보를 확인하고, 상기 확인한 주행 환경 정보 및 상기 차량의 주행 도로의 속성 정보를 포함하는 상기 메시지를 생성하는 차량. - 미리 정해진 주행 경로 상의 주행 환경 정보를 포함하는 메시지를 내비게이션에서 생성하는 단계; 및
상기 생성된 메시지의 상기 주행 환경 정보가 갱신된 것으로 결정되면, 상기 주행 환경 정보에 기초하여 주행하는 단계; 를 포함하고,
상기 주행 환경 정보에 기초하여 주행하는 단계는,
상기 내비게이션이 상기 주행 환경 정보 확인 불능 상태에 진입하면, 상기 진입 시점 이후 생성되는 상기 메시지를 무시하는 단계; 및
상기 내비게이션이 상기 주행 환경 정보 확인 가능 상태를 회복하면, 상기 회복 시점 직후 생성되는 상기 메시지의 상기 주행 환경 정보에 따라 주행하는 단계; 를 포함하는 차량의 제어방법. - 제 12 항에 있어서,
상기 메시지를 생성하는 단계는,
상기 메시지에 상기 주행 환경 정보 확인 순서에 따라 결정되는 순환식 카운터(Cyclic Counter)를 부가하는 차량의 제어방법. - 제 13 항에 있어서,
상기 주행 환경 정보에 기초하여 주행하는 단계는,
제 1 메시지의 상기 주행 환경 정보가 갱신된 것으로 결정되면, 상기 제 1 메시지에 부가된 제 1 카운터를 저장한 후, 제 2 메시지에 부가된 제 2 카운터를 상기 저장된 제 1 카운터와 비교하여 상기 제 2 메시지의 상기 주행 환경 정보가 갱신된 것인지 여부를 결정하는 차량의 제어방법. - 제 14 항에 있어서,
상기 진입 시점 이후 생성되는 상기 메시지를 무시하는 단계는,
상기 내비게이션이 상기 주행 환경 정보 확인 불능 상태이면, 상기 저장된 제 1 카운터를 무효(Invalid) 값으로 변환하여 저장하는 단계; 를 포함하는 차량의 제어방법. - 제 15 항에 있어서,
상기 회복 시점 직후 생성되는 상기 메시지의 상기 주행 환경 정보에 따라 주행하는 단계는,
상기 내비게이션이 상기 주행 환경 정보 확인 가능 상태를 회복하면, 상기 저장된 무효 값을 상기 회복 시점 직후 생성된 제 3 메시지에 부가된 제 3 카운터로 변환하여 저장하는 단계; 를 포함하는 차량의 제어방법. - 제 12 항에 있어서,
상기 내비게이션이 상기 주행 환경 정보 확인 불능 상태에 진입하면, 상기 진입 시점 이후 생성되는 상기 메시지를 무시하는 단계는,
상기 내비게이션의 상기 주행 환경 정보 확인 불능 상태 진입 시점에 상기 차량의 위치에 기초하여 상기 구동부 제어의 중단 여부를 결정하는 단계; 를 포함하는 차량의 제어방법. - 제 17 항에 있어서,
상기 차량의 위치에 기초하여 상기 구동부 제어의 중단 여부를 결정하는 단계는,
상기 내비게이션의 상기 주행 환경 정보 확인 불능 상태 진입 시점에 상기 차량이 상기 주행 경로 상에 존재하면 상기 구동부 제어의 유지를 결정하는 차량의 제어방법. - 제 18 항에 있어서,
상기 차량의 차륜의 회전 속도를 감지하는 단계; 를 더 포함하고,
상기 내비게이션이 상기 주행 환경 정보 확인 불능 상태에 진입하면, 상기 진입 시점 이후 생성되는 상기 메시지를 무시하는 단계는,
상기 구동부의 제어의 유지를 결정하면, 상기 차륜의 회전 속도를 참조하여 상기 구동부를 제어하는 차량의 제어방법. - 제 17 항에 있어서,
상기 차량의 위치에 기초하여 상기 구동부 제어의 중단 여부를 결정하는 단계는,
상기 내비게이션의 상기 주행 환경 정보 확인 불능 상태 진입 시점에 상기 차량이 상기 주행 경로를 이탈하여 존재하면 상기 구동부 제어의 중단을 결정하는 차량의 제어방법. - 제 12 항에 있어서,
외부의 입력, 및 상기 차량의 상기 주행 경로 이탈 중 적어도 하나에 따라 상기 주행 환경 정보 확인 불능 상태 또는 상기 주행 환경 정보 확인 가능 상태로 변경됨을 알리는 내비게이션 상태 정보를 생성하는 단계; 를 더 포함하는 차량의 제어방법. - 제 12 항에 있어서,
상기 메시지를 생성하는 단계는,
상기 주행 경로 상의 전방 과속 단속 카메라 정보, 전방 과속 방지턱 정보, 전방 도로 구배 정보, 및 전방 도로 곡률 정보 중 적어도 하나를 포함하는 상기 주행 환경 정보를 확인하고, 상기 확인한 주행 환경 정보 및 상기 차량의 주행 도로의 속성 정보를 포함하는 상기 메시지를 생성하는 차량의 제어방법.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020150172591A KR102182412B1 (ko) | 2015-12-04 | 2015-12-04 | 차량, 및 그 제어방법 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020150172591A KR102182412B1 (ko) | 2015-12-04 | 2015-12-04 | 차량, 및 그 제어방법 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20170066049A true KR20170066049A (ko) | 2017-06-14 |
| KR102182412B1 KR102182412B1 (ko) | 2020-11-24 |
Family
ID=59218113
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020150172591A Active KR102182412B1 (ko) | 2015-12-04 | 2015-12-04 | 차량, 및 그 제어방법 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR102182412B1 (ko) |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20070032948A (ko) * | 2004-07-20 | 2007-03-23 | 가부시키가이샤 나비타이무쟈판 | 경로 탐색 장치, 경로 탐색 방법 및 프로그램 |
| JP2008056073A (ja) * | 2006-08-31 | 2008-03-13 | Hitachi Ltd | 運転支援装置 |
| JP2010122093A (ja) * | 2008-11-20 | 2010-06-03 | Alpine Electronics Inc | 携帯用ナビゲーション装置及びその経路探索方法 |
| KR101252015B1 (ko) * | 2012-08-16 | 2013-04-09 | 주식회사 피엘케이 테크놀로지 | 차량의 경로 변경을 판정하는 내비게이션 시스템 |
| KR20150054442A (ko) * | 2013-11-12 | 2015-05-20 | 현대모비스 주식회사 | 차량 자동 주행 제어 장치 및 방법 |
-
2015
- 2015-12-04 KR KR1020150172591A patent/KR102182412B1/ko active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20070032948A (ko) * | 2004-07-20 | 2007-03-23 | 가부시키가이샤 나비타이무쟈판 | 경로 탐색 장치, 경로 탐색 방법 및 프로그램 |
| JP2008056073A (ja) * | 2006-08-31 | 2008-03-13 | Hitachi Ltd | 運転支援装置 |
| JP2010122093A (ja) * | 2008-11-20 | 2010-06-03 | Alpine Electronics Inc | 携帯用ナビゲーション装置及びその経路探索方法 |
| KR101252015B1 (ko) * | 2012-08-16 | 2013-04-09 | 주식회사 피엘케이 테크놀로지 | 차량의 경로 변경을 판정하는 내비게이션 시스템 |
| KR20150054442A (ko) * | 2013-11-12 | 2015-05-20 | 현대모비스 주식회사 | 차량 자동 주행 제어 장치 및 방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR102182412B1 (ko) | 2020-11-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9052998B2 (en) | Map display device, navigation device and map display method | |
| US9487129B2 (en) | Method and system to control vehicle turn indicators | |
| KR102331025B1 (ko) | 영상정보 획득장치, 차량, 및 그 제어방법 | |
| KR101782362B1 (ko) | 차량, 및 그 제어방법 | |
| US20190061780A1 (en) | Driving assist system using navigation information and operating method thereof | |
| JP2012225683A (ja) | カーナビゲーション装置 | |
| JP6160364B2 (ja) | 地図情報更新システム、地図情報更新装置、地図情報更新方法及びコンピュータプログラム | |
| WO2006070785A1 (ja) | ナビゲーション装置 | |
| US11555708B2 (en) | Apparatus and method for detecting deviation vehicle | |
| KR20180067066A (ko) | 차량 및 그 제어방법 | |
| JP2016125952A (ja) | 移動案内装置、移動案内装置の地図情報更新方法及びコンピュータプログラム | |
| JP2010091363A (ja) | ナビゲーション装置、ルート案内方法 | |
| KR102078771B1 (ko) | 차량, 및 그 제어방법 | |
| KR101570827B1 (ko) | 차로변경행태를 고려한 안전운전 경로 안내 장치 및 방법 | |
| KR101837393B1 (ko) | 차량, 및 그 제어방법 | |
| US8306743B2 (en) | Route guiding apparatus | |
| KR101463145B1 (ko) | 운행열차의 위치안내 중 음영구간을 해소하는 방법과 이를 적용한 열차위치 안내시스템 | |
| KR102182412B1 (ko) | 차량, 및 그 제어방법 | |
| JP2012154837A (ja) | 車載用ナビゲーション装置および高速道路走行時案内情報表示方法 | |
| JP2005077187A (ja) | 車載用ナビゲーション装置及び経路案内方法 | |
| KR101716232B1 (ko) | 차량, 및 그 제어방법 | |
| JP2011220688A (ja) | 車載ナビゲーション装置 | |
| JP2014081286A (ja) | ナビゲーション装置 | |
| JP5943482B2 (ja) | ナビゲーション装置およびナビゲーション方法 | |
| JP2012173269A (ja) | 車載用表示装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
Patent event code: PA01091R01D Comment text: Patent Application Patent event date: 20151204 |
|
| PG1501 | Laying open of application | ||
| A201 | Request for examination | ||
| PA0201 | Request for examination |
Patent event code: PA02012R01D Patent event date: 20191008 Comment text: Request for Examination of Application Patent event code: PA02011R01I Patent event date: 20151204 Comment text: Patent Application |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20200824 Patent event code: PE09021S01D |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
Patent event code: PE07011S01D Comment text: Decision to Grant Registration Patent event date: 20201114 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
Comment text: Registration of Establishment Patent event date: 20201118 Patent event code: PR07011E01D |
|
| PR1002 | Payment of registration fee |
Payment date: 20201119 End annual number: 3 Start annual number: 1 |
|
| PG1601 | Publication of registration |