KR20170068937A - 터널 조명을 이용한 자율주행 차량 항법 시스템 - Google Patents
터널 조명을 이용한 자율주행 차량 항법 시스템 Download PDFInfo
- Publication number
- KR20170068937A KR20170068937A KR1020150176020A KR20150176020A KR20170068937A KR 20170068937 A KR20170068937 A KR 20170068937A KR 1020150176020 A KR1020150176020 A KR 1020150176020A KR 20150176020 A KR20150176020 A KR 20150176020A KR 20170068937 A KR20170068937 A KR 20170068937A
- Authority
- KR
- South Korea
- Prior art keywords
- vehicle
- unit
- information
- image
- tunnel
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images



Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0212—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0231—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means
- G05D1/0246—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using a video camera in combination with image processing means
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0257—Control of position or course in two dimensions specially adapted to land vehicles using a radar
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- Aviation & Aerospace Engineering (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Multimedia (AREA)
- Electromagnetism (AREA)
- Navigation (AREA)
Abstract
Description
도 2는 본 발명의 일실시례에 따른 터널 조명을 이용한 자율주행 차량 항법 시스템의 맵매칭 기술을 도시한 개념도.
도 3은 본 발명의 일실시례에 따른 맵매칭을 위한 터널 조명 검출 기법을 도시한 블록도.
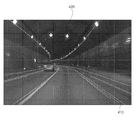
도 4는 본 발명의 일실시례에 따른 터널 조명을 이용한 자율주행 차량 항법 시스템의 예시도.

200 : 환경인지 센서부
300 : 레이더 감지부
400 : 센서융합 측위부
500: 주변환경 인지부
600 : 주행경로 생성부
700: 차량제어부
Claims (7)
- 차량의 위치정보와 지도정보를 측위를 하는 위치정보 측정부;
차량 주변을 촬영하는 환경인지 센서부;
차량 주변을 사물을 감지하는 레이더 감지부;
상기 위치정보 측정부의 차량 위치와 상기 환경인지 센서부의 촬영 영상을 기반으로 미리 정확한 자차 위치를 추정하는 센서융합 측위부;
상기 촬영 영상과 사물을 기반으로 주변 환경 정보를 출력하는 주변환경 인지부;
상기 측위 정보와 주변 환경 정보를 융합하여 차량의 주행 경로를 생성하는 주행경로 생성부; 및
상기 생성된 경로를 기반으로 차량을 제어하는 차량제어부;
를 포함하는 터널 조명을 이용한 자율주행 차량 항법 장치. - 제 1 항에 있어서.
상기 주변환경 인지부는 상기 환경인지 센서부의 영상 정보와 근거로 터널 조명을 검출하여 가상의 차선정보를 이용하여 가상경로를 설정하는 터널 조명을 이용한 자율주행 차량 항법 장치.
- 제 1 항에 있어서
상기 주행경로 생성부는 검출된 가상의 차선정보와 획득된 실제 차선정보의 맵 매칭을 통하여 상기 차량의 현재 위치정보를 보정하는 것을 특징으로 하는 가상차선과 센서 융합을 통한 무인 자율주행 자동차의 항법 장치. - 제 1 항에 있어서
상기 센서융합 측위부는 상기 환경인지 센서부로부터 영상을 일정 이상의 임계값을 갖는 이진화 영상으로 변환하는 터널 조명을 이용한 자율주행 차량 항법 장치. - 카메라를 통해 차량 전방 영상을 출력하는 단계;
상기 전방 영상을 이진화 영상으로 변환하는 단계;
상기 이진화 영상에서 터널 조명 후보군을 추출하는 단계;
상기 터널 조명 후보군을 차량 중심 좌표계로 변환하는 단계;
상기 좌표계를 지도와 상기 차량의 위치에 맵 매칭하는 단계;
상기 맵 매칭 정보를 이용하여 자율주행하는 단계;
를 포함하는 터널 조명을 이용한 자율주행 차량 항법 시스템. - 제 5 항에 있어서
상기 차량 중심 좌표계 변환 단계는 터널 내 조명의 높이를 이용하여 상기 차량 중심 좌표계를 측정하는 것을 특징으로 하는 터널 조명을 이용한 자율주행 차량 항법 시스템. - 제 5 항에 있어서
상기 맵 매칭 단계는 중앙등의 설치 위치를 미리 지도상에 저장해 두고, 전방카메라로 검출된 중앙등을 좌표 변환하여 맵매칭하는 것을 특징으로 하는 터널 조명을 이용한 자율주행 차량 항법 시스템.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020150176020A KR102428765B1 (ko) | 2015-12-10 | 2015-12-10 | 터널 조명을 이용한 자율주행 차량 항법 시스템 |
| KR1020200055203A KR102385907B1 (ko) | 2015-12-10 | 2020-05-08 | 자율주행 차량 항법 장치 및 항법 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020150176020A KR102428765B1 (ko) | 2015-12-10 | 2015-12-10 | 터널 조명을 이용한 자율주행 차량 항법 시스템 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020200055203A Division KR102385907B1 (ko) | 2015-12-10 | 2020-05-08 | 자율주행 차량 항법 장치 및 항법 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20170068937A true KR20170068937A (ko) | 2017-06-20 |
| KR102428765B1 KR102428765B1 (ko) | 2022-08-02 |
Family
ID=59281139
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020150176020A Active KR102428765B1 (ko) | 2015-12-10 | 2015-12-10 | 터널 조명을 이용한 자율주행 차량 항법 시스템 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR102428765B1 (ko) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109597404A (zh) * | 2017-09-30 | 2019-04-09 | 徐工集团工程机械股份有限公司 | 压路机及其控制器、控制方法和系统 |
| KR102030612B1 (ko) * | 2018-08-23 | 2019-10-10 | 한국지질자원연구원 | 위치가 공간형상정보로 정의되는 지도를 이용한 네비게이션 시스템 |
| KR20200064339A (ko) | 2018-11-29 | 2020-06-08 | 주식회사 파인디지털 | 영상을 이용하여 터널 내 차량의 측위를 수행하는 차량용 전자 기기 및 방법 |
| KR20200075922A (ko) * | 2018-12-10 | 2020-06-29 | 현대자동차주식회사 | 차량의 자율주행 제어 장치 및 방법 |
| KR20200137487A (ko) * | 2019-05-30 | 2020-12-09 | 한양대학교 산학협력단 | 웨이포인트를 이용한 웨이포인트 포즈 검출 및 측위 방법 및 그 장치 |
| CN115147785A (zh) * | 2021-03-29 | 2022-10-04 | 东风汽车集团股份有限公司 | 一种车辆识别方法、装置、电子设备和存储介质 |
| KR20230068586A (ko) | 2021-11-11 | 2023-05-18 | 재단법인 지능형자동차부품진흥원 | 음영지역에서 자율주행차량의 위치추정방법 및 이를 위한 자율주행시스템 |
| KR20230112199A (ko) | 2022-01-19 | 2023-07-27 | 현대건설(주) | 문자인식으로 측위가 가능한 터널내 내공 측량로봇 및 이를 이용한 측량방법 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007108043A (ja) * | 2005-10-14 | 2007-04-26 | Xanavi Informatics Corp | 位置測位装置、および位置測位方法 |
| JP2007240380A (ja) * | 2006-03-09 | 2007-09-20 | Alpine Electronics Inc | トンネル内位置検出装置 |
| KR20150084143A (ko) * | 2014-01-13 | 2015-07-22 | 한양대학교 산학협력단 | 다양한 주행 환경 기반의 차량 자율 주행 장치 및 그 경로 계획 방법 |
-
2015
- 2015-12-10 KR KR1020150176020A patent/KR102428765B1/ko active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007108043A (ja) * | 2005-10-14 | 2007-04-26 | Xanavi Informatics Corp | 位置測位装置、および位置測位方法 |
| JP2007240380A (ja) * | 2006-03-09 | 2007-09-20 | Alpine Electronics Inc | トンネル内位置検出装置 |
| KR20150084143A (ko) * | 2014-01-13 | 2015-07-22 | 한양대학교 산학협력단 | 다양한 주행 환경 기반의 차량 자율 주행 장치 및 그 경로 계획 방법 |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109597404A (zh) * | 2017-09-30 | 2019-04-09 | 徐工集团工程机械股份有限公司 | 压路机及其控制器、控制方法和系统 |
| KR102030612B1 (ko) * | 2018-08-23 | 2019-10-10 | 한국지질자원연구원 | 위치가 공간형상정보로 정의되는 지도를 이용한 네비게이션 시스템 |
| KR20200064339A (ko) | 2018-11-29 | 2020-06-08 | 주식회사 파인디지털 | 영상을 이용하여 터널 내 차량의 측위를 수행하는 차량용 전자 기기 및 방법 |
| KR20200075922A (ko) * | 2018-12-10 | 2020-06-29 | 현대자동차주식회사 | 차량의 자율주행 제어 장치 및 방법 |
| KR20200137487A (ko) * | 2019-05-30 | 2020-12-09 | 한양대학교 산학협력단 | 웨이포인트를 이용한 웨이포인트 포즈 검출 및 측위 방법 및 그 장치 |
| CN115147785A (zh) * | 2021-03-29 | 2022-10-04 | 东风汽车集团股份有限公司 | 一种车辆识别方法、装置、电子设备和存储介质 |
| KR20230068586A (ko) | 2021-11-11 | 2023-05-18 | 재단법인 지능형자동차부품진흥원 | 음영지역에서 자율주행차량의 위치추정방법 및 이를 위한 자율주행시스템 |
| KR20230112199A (ko) | 2022-01-19 | 2023-07-27 | 현대건설(주) | 문자인식으로 측위가 가능한 터널내 내공 측량로봇 및 이를 이용한 측량방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR102428765B1 (ko) | 2022-08-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20170068937A (ko) | 터널 조명을 이용한 자율주행 차량 항법 시스템 | |
| CN110530372B (zh) | 定位方法、路径确定方法、装置、机器人及存储介质 | |
| US10384679B2 (en) | Travel control method and travel control apparatus | |
| US11250288B2 (en) | Information processing apparatus and information processing method using correlation between attributes | |
| US10620317B1 (en) | Lidar-based high definition map generation | |
| US10369993B2 (en) | Method and device for monitoring a setpoint trajectory to be traveled by a vehicle for being collision free | |
| US11136048B2 (en) | System for sensor synchronization data analysis in an autonomous driving vehicle | |
| CN112074885A (zh) | 车道标志定位 | |
| US20200341150A1 (en) | Systems and methods for constructing a high-definition map based on landmarks | |
| US12579676B2 (en) | Ego motion-based online calibration between coordinate systems | |
| EP3358545A1 (en) | Travel control method and travel control device | |
| CN111998860A (zh) | 自动驾驶定位数据校验方法、装置、电子设备及存储介质 | |
| WO2019208101A1 (ja) | 位置推定装置 | |
| US11204610B2 (en) | Information processing apparatus, vehicle, and information processing method using correlation between attributes | |
| CN114694111A (zh) | 车辆定位 | |
| JP2018180772A (ja) | 物体検出装置 | |
| US11468691B2 (en) | Traveling lane recognition apparatus and traveling lane recognition method | |
| CN116453031B (zh) | 一种煤矿井下环境感知方法、装置及存储介质 | |
| JP2017181476A (ja) | 車両位置検出装置、車両位置検出方法及び車両位置検出用コンピュータプログラム | |
| KR102385907B1 (ko) | 자율주행 차량 항법 장치 및 항법 | |
| JP6141734B2 (ja) | ステレオ画像処理装置 | |
| KR20160125803A (ko) | 영역 추출 장치, 물체 탐지 장치 및 영역 추출 방법 | |
| KR102705927B1 (ko) | 운전자 보조 시스템 및 운전자 보조 방법 | |
| CN113932820A (zh) | 对象检测的方法和装置 | |
| US20240273743A1 (en) | Method and system for correcting a position of at least one feature in the surroundings of an ego vehicle |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
St.27 status event code: A-0-1-A10-A12-nap-PA0109 |
|
| R17-X000 | Change to representative recorded |
St.27 status event code: A-3-3-R10-R17-oth-X000 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-2-2-P10-P22-nap-X000 |
|
| R17-X000 | Change to representative recorded |
St.27 status event code: A-3-3-R10-R17-oth-X000 |
|
| A107 | Divisional application of patent | ||
| PA0107 | Divisional application |
St.27 status event code: A-0-1-A10-A18-div-PA0107 St.27 status event code: A-0-1-A10-A16-div-PA0107 |
|
| A201 | Request for examination | ||
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U11-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-5-5-R10-R18-oth-X000 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 4 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |