KR20170070414A - 보행보조장치착용형 로봇장치 및 그 제어 방법 - Google Patents
보행보조장치착용형 로봇장치 및 그 제어 방법 Download PDFInfo
- Publication number
- KR20170070414A KR20170070414A KR1020150177885A KR20150177885A KR20170070414A KR 20170070414 A KR20170070414 A KR 20170070414A KR 1020150177885 A KR1020150177885 A KR 1020150177885A KR 20150177885 A KR20150177885 A KR 20150177885A KR 20170070414 A KR20170070414 A KR 20170070414A
- Authority
- KR
- South Korea
- Prior art keywords
- sound
- robot apparatus
- wearable robot
- required torque
- torque amount
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images





Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/0006—Exoskeletons, i.e. resembling a human figure
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H3/00—Appliances for aiding patients or disabled persons to walk about
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/08—Controls for manipulators by means of sensing devices, e.g. viewing or touching devices
- B25J13/085—Force or torque sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/02—Sensing devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1628—Program controls characterised by the control loop
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1628—Program controls characterised by the control loop
- B25J9/1633—Program controls characterised by the control loop compliant, force, torque control, e.g. combined with position control
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L5/00—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes
- G01L5/0028—Force sensors associated with force applying means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H3/00—Appliances for aiding patients or disabled persons to walk about
- A61H3/008—Appliances for aiding patients or disabled persons to walk about using suspension devices for supporting the body in an upright walking or standing position, e.g. harnesses
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/003—Controls for manipulators by means of an audio-responsive input
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/08—Controls for manipulators by means of sensing devices, e.g. viewing or touching devices
- B25J13/081—Touching devices, e.g. pressure-sensitive
- B25J13/084—Tactile sensors
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L5/00—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes
- G01L5/0061—Force sensors associated with industrial machines or actuators
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/40—Robotics, robotics mapping to robotics vision
- G05B2219/40145—Force sensation of follower converted to audio signal for operator
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/40—Robotics, robotics mapping to robotics vision
- G05B2219/40305—Exoskeleton, human robot interaction, extenders
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/40—Robotics, robotics mapping to robotics vision
- G05B2219/40413—Robot has multisensors surrounding operator, to understand intention of operator
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/40—Robotics, robotics mapping to robotics vision
- G05B2219/40414—Man robot interface, exchange of information between operator and robot
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Human Computer Interaction (AREA)
- Health & Medical Sciences (AREA)
- Pain & Pain Management (AREA)
- Rehabilitation Therapy (AREA)
- General Physics & Mathematics (AREA)
- Analytical Chemistry (AREA)
- Epidemiology (AREA)
- Chemical & Material Sciences (AREA)
- Physical Education & Sports Medicine (AREA)
- Physics & Mathematics (AREA)
- Life Sciences & Earth Sciences (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Rehabilitation Tools (AREA)
- Manipulator (AREA)
Abstract
일 측면에 따른 착용형 로봇장치는, 프레임, 프레임에 구비되어 사용자로부터 가해지는 힘 정보를 수집하는 감지부, 감지부에서 수집된 정보에 기초해 착용형 로봇장치의 동작에 필요한 요구 토크량을 결정하고, 상기 요구 토크량에 대응되는 소리를 결정하는 제어부 및 결정된 소리를 출력하는 출력부를 포함한다.
Description
도 2는 일 실시 예에 따른 착용형 로봇장치의 자유도를 도시한 도면이다.
도 3은 일 실시 예에 따른 착용형 로봇장치의 제어 블록도를 도시한 도면이다.
도 4는 착용형 로봇장치의 동작 모드에 따라 출력되는 소리의 주파수 대역의 결정 예를 도시한 도면이다.
도 5는 단일 동작 모드에서 착용형 로봇장치의 요구 토크 량의 크기에 따른 소리의 주파수 대역의 결정 예를 도시한 도면이다.
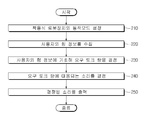
도 6은 일 실시 예에 따른 착용형 로봇장치의 제어 과정을 도시한 흐름도 이다.
20: 제 2 프레임
30: 둔부관절
50: 무릎 관절
60: 발 구조물
70: 발목 관절
90: 제1고정장치
100: 착용형 로봇장치
110: 입력부
120: 감지부
130: 메모리
140: 제어부
150: 출력부
Claims (20)
- 프레임;
상기 프레임에 구비되어 사용자로부터 가해지는 힘 정보를 수집하는 감지부;
상기 감지부에서 수집된 정보에 기초해 착용형 로봇장치의 동작에 필요한 요구 토크량을 결정하고, 상기 요구 토크량에 대응되는 소리를 결정하는 제어부; 및
상기 결정된 소리를 출력하는 출력부;를 포함하는 착용형 로봇장치. - 제 1항에 있어서,
상기 제어부는,
상기 결정된 요구 토크량에 따라 상기 소리의 주파수, 강도 및 음색을 결정하는 착용형 로봇장치. - 제 1항에 있어서,
상기 출력부는,
상기 결정된 요구 토크량에 따라 서로 다른 주파수, 강도 및 음색을 가지는 소리를 출력하는 착용형 로봇장치. - 제 1항에 있어서,
상기 출력부는,
상기 착용형 로봇장치의 동작 모드에 따라 서로 다른 주파수, 강도 및 음색을 가지는 소리를 출력하는 착용형 로봇 장치. - 제 4항에 있어서,
상기 출력부는,
상기 착용형 로봇장치가 제 1 동작 모드로 동작하면 미리 설정된 제 1 주파수 대역의 소리를 출력하고,
상기 착용형 로봇장치가 제 2 동작 모드로 동작하면 미리 설정된 제 2 주파수 대역의 소리를 출력하는 착용형 로봇장치. - 제 1항에 있어서,
상기 착용형 로봇장치의 동작 모드를 입력 받는 입력부;를 더 포함하는 착용형 로봇장치. - 제 1항에 있어서,
상기 착용형 로봇장치의 동작 모드에 따른 힘의 목표 값 정보가 저장된 메모리;를 더 포함하는 착용형 로봇장치. - 제 7항에 있어서,
상기 제어부는,
상기 메모리에 저장된 힘의 목표 값 정보와 상기 감지부에서 수집된 사용자의 힘 정보의 차이에 기초해 상기 착용형 로봇장치의 동작에 필요한 요구 토크량을 결정하는 착용형 로봇장치. - 제 8항에 있어서,
상기 제어부는,
상기 결정된 요구 토크량의 크기에 따라 상기 소리의 주파수, 강도 및 음색을 결정하는 착용형 로봇장치. - 제 7항에 있어서,
상기 메모리는,
상기 요구 토크량에 따라 상기 출력부에서 출력되는 소리의 주파수, 강도 및 음색 정보를 저장하는 착용형 로봇 장치. - 제 1항에 있어서,
상기 감지부는,
상기 착용형 로봇장치의 엔드포인트(end point)에 구비되는 착용형 로봇장치. - 제 1항에 있어서,
상기 감지부는,
사용자의 힘 정보를 수집하는 힘 센서를 포함하는 착용형 로봇장치. - 감지부에서 사용자의 힘 정보를 수집하는 단계;
상기 힘 정보에 기초해 착용형 로봇장치의 동작에 필요한 요구 토크 량을 결정하는 단계;
상기 요구 토크 량에 대응되는 소리를 결정하는 단계; 및
상기 결정된 소리를 출력하는 단계;를 포함하는 착용형 로봇 장치의 제어 방법. - 제 13항에 있어서,
상기 결정된 요구 토크 량에 대응되는 소리를 결정하는 단계는,
상기 결정된 요구 토크량에 따라 상기 소리의 주파수, 강도 및 음색을 결정하는 것을 포함하는 착용형 로봇 장치의 제어 방법. - 제 13항에 있어서,
상기 소리를 출력하는 단계는,
상기 결정된 요구 토크량에 따라 서로 다른 주파수, 강도 및 음색을 가지는 소리를 출력하는 것을 포함하는 착용형 로봇 장치의 제어 방법. - 제 15항에 있어서,
상기 소리를 출력하는 단계는,
상기 착용형 로봇 장치의 동작 모드에 따라 서로 다른 주파수, 강도 및 음색을 가지는 소리를 출력하는 것을 포함하는 착용형 로봇 장치의 제어 방법. - 제 13항에 있어서,
상기 소리를 출력하는 단계는,
상기 착용형 로봇장치가 제 1 동작 모드로 동작하면 미리 설정된 제 1 주파수 대역의 소리를 출력하고,
상기 착용형 로봇장치가 제 2 동작 모드로 동작하면 미리 설정된 제 2 주파수 대역의 소리를 출력하는 것을 포함하는 착용형 로봇장치의 제어 방법. - 제 13항에 있어서,
상기 착용형 로봇장치의 동작 모드를 설정하는 단계;를 더 포함하는 착용형 로봇장치의 제어 방법. - 제 13항에 있어서,
상기 착용형 로봇장치의 동작에 필요한 요구 토크 량을 결정하는 단계는,
메모리에 저장된 힘의 목표 값 정보와 감지부에서 수집된 사용자의 힘 정보의 차이에 기초해 상기 착용형 로봇 장치의 동작에 필요한 요구 토크량을 결정하는 것을 포함하는 착용형 로봇장치의 제어 방법. - 제 19항에 있어서,
상기 요구 토크 량에 대응되는 소리를 결정하는 단계는,
상기 요구 토크 량의 크기에 따라 상기 소리의 주파수, 강도 및 음색을 결정하는 것을 포함하는 착용형 로봇 장치의 제어 방법.
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020150177885A KR20170070414A (ko) | 2015-12-14 | 2015-12-14 | 보행보조장치착용형 로봇장치 및 그 제어 방법 |
| US15/183,144 US10086513B2 (en) | 2015-12-14 | 2016-06-15 | Wearable robot device and method of controlling the wearable robot device |
| CN201610499479.7A CN106863265B (zh) | 2015-12-14 | 2016-06-29 | 穿戴式机器人装置和控制穿戴式机器人装置的方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020150177885A KR20170070414A (ko) | 2015-12-14 | 2015-12-14 | 보행보조장치착용형 로봇장치 및 그 제어 방법 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20170070414A true KR20170070414A (ko) | 2017-06-22 |
Family
ID=59019230
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020150177885A Ceased KR20170070414A (ko) | 2015-12-14 | 2015-12-14 | 보행보조장치착용형 로봇장치 및 그 제어 방법 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US10086513B2 (ko) |
| KR (1) | KR20170070414A (ko) |
| CN (1) | CN106863265B (ko) |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11093590B2 (en) * | 2015-08-31 | 2021-08-17 | Avaya Inc. | Selection of robot operation mode from determined compliance with a security criteria |
| WO2017156363A1 (en) * | 2016-03-10 | 2017-09-14 | Massachusetts Institute Of Technology | Robotic systems for supporting a user |
| USD851387S1 (en) * | 2017-05-22 | 2019-06-18 | U.S. Bionics, Inc. | Trunk and hip assembly for exoskeleton apparatus |
| WO2019005945A1 (en) | 2017-06-27 | 2019-01-03 | Massachusetts Institute Of Technology | PORTABLE ROBOTIC SYSTEMS FOR SUPPORTING A LOAD |
| FR3069664B1 (fr) * | 2017-07-31 | 2019-08-30 | Safran Electronics & Defense | Procede d’assistance d’au moins un mouvement d’un utilisateur et dispositif correspondant |
| TWI667049B (zh) * | 2017-09-25 | 2019-08-01 | 林宗正 | 可減少雜訊的感測模組 |
| JP2021181131A (ja) * | 2020-05-18 | 2021-11-25 | 株式会社ジェイテクト | アシスト装置 |
| EP4271346B1 (en) * | 2020-12-30 | 2025-07-09 | Ozyegin Universitesi | An exoskeleton system |
| US12530641B2 (en) | 2023-08-28 | 2026-01-20 | International Business Machines Corporation | Aggregated capability derived from workers' skills and wearable robotic systems' capabilities |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07251394A (ja) | 1994-03-17 | 1995-10-03 | Fujitsu Ltd | ロボットの状況監視装置 |
| US7153242B2 (en) * | 2001-05-24 | 2006-12-26 | Amit Goffer | Gait-locomotor apparatus |
| JP4611580B2 (ja) * | 2001-06-27 | 2011-01-12 | 本田技研工業株式会社 | トルク付与システム |
| CN101119695B (zh) * | 2005-05-27 | 2011-06-15 | 本田技研工业株式会社 | 行走辅助装置 |
| JP2007097636A (ja) | 2005-09-30 | 2007-04-19 | Matsushita Electric Ind Co Ltd | 筋力補助装置 |
| KR100757500B1 (ko) | 2005-12-08 | 2007-09-11 | 한국전자통신연구원 | 서비스 로봇과 사람 사이의 동작기반 인터페이스 시스템 및방법 |
| JP5244348B2 (ja) | 2007-09-04 | 2013-07-24 | 国立大学法人 筑波大学 | 装着式動作補助装置及びその制御方法 |
| CA2794193C (en) | 2010-03-23 | 2017-08-22 | Idrogenet S.R.L. | A hand rehabilitation device |
| US9844447B2 (en) * | 2010-04-09 | 2017-12-19 | Deka Products Limited Partnership | System and apparatus for robotic device and methods of using thereof |
| JP5515116B2 (ja) | 2010-06-03 | 2014-06-11 | 国立大学法人東京農工大学 | パワーアシストスーツ |
| CA2811593A1 (en) * | 2010-09-27 | 2012-04-05 | Vanderbilt University | Movement assistance device |
| WO2013035814A1 (ja) * | 2011-09-06 | 2013-03-14 | 国立大学法人 和歌山大学 | パワーアシストロボット装置およびその制御方法 |
| KR101305617B1 (ko) * | 2012-01-02 | 2013-09-09 | 현대자동차주식회사 | 착용식 로봇의 양중제어방법 및 양중제어시스템 |
| JP5986445B2 (ja) * | 2012-07-20 | 2016-09-06 | 国立大学法人九州大学 | 歩行用遊脚振子運動補助具およびアシスト力の制御方法 |
| KR101400331B1 (ko) | 2012-07-25 | 2014-05-28 | 삼성중공업 주식회사 | 운동 보조 장치 및 방법 |
| KR101417488B1 (ko) * | 2012-12-17 | 2014-07-08 | 현대자동차주식회사 | 착용로봇의 의도토크 추출방법 및 추출시스템 |
| KR102146363B1 (ko) * | 2013-10-31 | 2020-08-20 | 삼성전자주식회사 | 착용형 로봇 및 그 제어 방법 |
| KR102115950B1 (ko) * | 2013-11-07 | 2020-06-05 | 삼성전자주식회사 | 보행 보조 로봇 및 보행 보조 로봇의 제어 방법 |
| KR20150094427A (ko) * | 2014-02-11 | 2015-08-19 | 삼성전자주식회사 | 착용형 로봇 및 그 제어 방법 |
-
2015
- 2015-12-14 KR KR1020150177885A patent/KR20170070414A/ko not_active Ceased
-
2016
- 2016-06-15 US US15/183,144 patent/US10086513B2/en active Active
- 2016-06-29 CN CN201610499479.7A patent/CN106863265B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| CN106863265B (zh) | 2021-07-30 |
| US10086513B2 (en) | 2018-10-02 |
| US20170165833A1 (en) | 2017-06-15 |
| CN106863265A (zh) | 2017-06-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20170070414A (ko) | 보행보조장치착용형 로봇장치 및 그 제어 방법 | |
| JP5642534B2 (ja) | 装着式動作補助装置、そのインタフェース装置及びプログラム | |
| CN108236560B (zh) | 步态活动促进的电动步行辅具及其应用方法 | |
| US20190224841A1 (en) | Exosuit systems and methods for monitoring working safety and performance | |
| CN110430974A (zh) | 用于辅助机械护甲系统的系统和方法 | |
| CN109718061B (zh) | 辅助装置、辅助方法以及记录介质 | |
| JP6421777B2 (ja) | 歩行補助装置、及びその作動方法 | |
| WO2007012068A2 (en) | Device for movement detection, movement correction and training | |
| JP2015177925A (ja) | 歩行支援装置、歩容計測装置、方法及びプログラム | |
| JP2004313555A (ja) | 機能的電気刺激歩行補助装置 | |
| WO2020112196A1 (en) | Cloud-based control system and method enabling interactive clinical care using a powered mobility assistance device | |
| JP2014087636A (ja) | 歩行支援装置 | |
| CN110290898A (zh) | 用于与辅助机械护甲一起使用的贴片系统 | |
| JP2018114278A (ja) | 歩行転倒防止装置、歩行転倒防止装置の制御装置及び制御方法、並びに、歩行転倒防止装置用制御プログラム | |
| KR20250015074A (ko) | 웨어러블 장치 및 이의 동작 방법 | |
| KR102725149B1 (ko) | 착용 감지 기능을 제공하는 웨어러블 장치 및 웨어러블 장치의 동작 방법 | |
| JP2017158909A (ja) | 歩行評価補助具及び、その端末とシステム | |
| JP2021074265A (ja) | 歩容指標出力装置、歩容指標出力方法、歩容指標情報収集システム、歩容指標出力システム、及び歩容指標比較システム | |
| Lin et al. | Towards Accessible Mobility Support: User-Centered Design of a Passive, Multi-Functional, Low-Cost Knee Exoskeleton | |
| US20250213417A1 (en) | Control method for reducing power consumption of wearable device, and wearable device performing same | |
| JP2022513278A (ja) | 人の関節用の医療器具、および医療器具を操作するための方法 | |
| JP2021090516A (ja) | 歩行状態判定装置、歩行補助装置及び制御プログラム | |
| KR20260038712A (ko) | 착용 상태 감지 기능을 구비한 웨어러블 장치 및 전자 장치, 이들의 동작 방법 | |
| US20240009061A1 (en) | Wearable device for providing wear detection function and operation method thereof | |
| KR20250163445A (ko) | 구동 모듈 및 이를 포함하는 전자 장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| PA0109 | Patent application |
Patent event code: PA01091R01D Comment text: Patent Application Patent event date: 20151214 |
|
| PA0201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20170403 Patent event code: PE09021S01D |
|
| AMND | Amendment | ||
| PG1501 | Laying open of application | ||
| E601 | Decision to refuse application | ||
| PE0601 | Decision on rejection of patent |
Patent event date: 20171021 Comment text: Decision to Refuse Application Patent event code: PE06012S01D Patent event date: 20170403 Comment text: Notification of reason for refusal Patent event code: PE06011S01I |
|
| AMND | Amendment | ||
| PX0901 | Re-examination |
Patent event code: PX09011S01I Patent event date: 20171021 Comment text: Decision to Refuse Application Patent event code: PX09012R01I Patent event date: 20170525 Comment text: Amendment to Specification, etc. |
|
| PX0601 | Decision of rejection after re-examination |
Comment text: Decision to Refuse Application Patent event code: PX06014S01D Patent event date: 20171214 Comment text: Amendment to Specification, etc. Patent event code: PX06012R01I Patent event date: 20171116 Comment text: Decision to Refuse Application Patent event code: PX06011S01I Patent event date: 20171021 Comment text: Amendment to Specification, etc. Patent event code: PX06012R01I Patent event date: 20170525 Comment text: Notification of reason for refusal Patent event code: PX06013S01I Patent event date: 20170403 |