KR20170077143A - 분류 기계에 물품을 공급하기 위한 장치 및 분류 기계 - Google Patents
분류 기계에 물품을 공급하기 위한 장치 및 분류 기계 Download PDFInfo
- Publication number
- KR20170077143A KR20170077143A KR1020177011858A KR20177011858A KR20170077143A KR 20170077143 A KR20170077143 A KR 20170077143A KR 1020177011858 A KR1020177011858 A KR 1020177011858A KR 20177011858 A KR20177011858 A KR 20177011858A KR 20170077143 A KR20170077143 A KR 20170077143A
- Authority
- KR
- South Korea
- Prior art keywords
- article
- articles
- manipulator
- conveyor surface
- conveyor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images










Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G47/00—Article or material-handling devices associated with conveyors; Methods employing such devices
- B65G47/52—Devices for transferring articles or materials between conveyors i.e. discharging or feeding devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B07—SEPARATING SOLIDS FROM SOLIDS; SORTING
- B07C—POSTAL SORTING; SORTING INDIVIDUAL ARTICLES, OR BULK MATERIAL FIT TO BE SORTED PIECE-MEAL, e.g. BY PICKING
- B07C3/00—Sorting according to destination
- B07C3/02—Apparatus characterised by the means used for distribution
- B07C3/06—Linear sorting machines in which articles are removed from a stream at selected points
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B07—SEPARATING SOLIDS FROM SOLIDS; SORTING
- B07C—POSTAL SORTING; SORTING INDIVIDUAL ARTICLES, OR BULK MATERIAL FIT TO BE SORTED PIECE-MEAL, e.g. BY PICKING
- B07C1/00—Measures preceding sorting according to destination
- B07C1/02—Forming articles into a stream; Arranging articles in a stream, e.g. spacing, orientating
- B07C1/06—Orientating; Aligning ; Aligning to one edge
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B07—SEPARATING SOLIDS FROM SOLIDS; SORTING
- B07C—POSTAL SORTING; SORTING INDIVIDUAL ARTICLES, OR BULK MATERIAL FIT TO BE SORTED PIECE-MEAL, e.g. BY PICKING
- B07C3/00—Sorting according to destination
- B07C3/10—Apparatus characterised by the means used for detection ofthe destination
- B07C3/14—Apparatus characterised by the means used for detection ofthe destination using light-responsive detecting means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1679—Program controls characterised by the tasks executed
- B25J9/1684—Tracking a line or surface by means of sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1694—Program controls characterised by use of sensors other than normal servo-feedback from position, speed or acceleration sensors, perception control, multi-sensor controlled systems, sensor fusion
- B25J9/1697—Vision controlled systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65B—MACHINES, APPARATUS OR DEVICES FOR, OR METHODS OF, PACKAGING ARTICLES OR MATERIALS; UNPACKING
- B65B35/00—Supplying, feeding, arranging or orientating articles to be packaged
- B65B35/30—Arranging and feeding articles in groups
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65B—MACHINES, APPARATUS OR DEVICES FOR, OR METHODS OF, PACKAGING ARTICLES OR MATERIALS; UNPACKING
- B65B35/00—Supplying, feeding, arranging or orientating articles to be packaged
- B65B35/30—Arranging and feeding articles in groups
- B65B35/36—Arranging and feeding articles in groups by grippers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G1/00—Storing articles, individually or in orderly arrangement, in warehouses or magazines
- B65G1/02—Storage devices
- B65G1/04—Storage devices mechanical
- B65G1/137—Storage devices mechanical with arrangements or automatic control means for selecting which articles are to be removed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G43/00—Control devices, e.g. for safety, warning or fault-correcting
- B65G43/08—Control devices operated by article or material being fed, conveyed or discharged
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G47/00—Article or material-handling devices associated with conveyors; Methods employing such devices
- B65G47/74—Feeding, transfer, or discharging devices of particular kinds or types
- B65G47/90—Devices for picking-up and depositing articles or materials
- B65G47/905—Control arrangements
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G47/00—Article or material-handling devices associated with conveyors; Methods employing such devices
- B65G47/74—Feeding, transfer, or discharging devices of particular kinds or types
- B65G47/90—Devices for picking-up and depositing articles or materials
- B65G47/91—Devices for picking-up and depositing articles or materials incorporating pneumatic, e.g. suction, grippers
- B65G47/918—Devices for picking-up and depositing articles or materials incorporating pneumatic, e.g. suction, grippers with at least two picking-up heads
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G47/00—Article or material-handling devices associated with conveyors; Methods employing such devices
- B65G47/74—Feeding, transfer, or discharging devices of particular kinds or types
- B65G47/94—Devices for flexing or tilting travelling structures; Throw-off carriages
- B65G47/96—Devices for tilting links or platform
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G2203/00—Indexing code relating to control or detection of the articles or the load carriers during conveying
- B65G2203/02—Control or detection
- B65G2203/0208—Control or detection relating to the transported articles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G2203/00—Indexing code relating to control or detection of the articles or the load carriers during conveying
- B65G2203/04—Detection means
- B65G2203/042—Sensors
- B65G2203/044—Optical
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/37—Measurements
- G05B2219/37555—Camera detects orientation, position workpiece, points of workpiece
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Robotics (AREA)
- Sorting Of Articles (AREA)
- Specific Conveyance Elements (AREA)
- Manipulator (AREA)
Abstract
Description
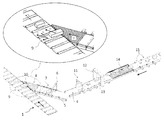
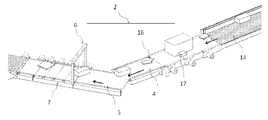
도 2는 물품을 자동으로 로딩하기 위한 스테이션을 포함하는 도 1의 설비의 일부 영역의 개략도를 나타낸다.
도 3는 도 2의 영역의 추가 도를 나타내는 것으로, 물품이 서로 분리되지 못하는 2가지의 예가 나타나 있다.
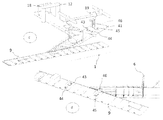
도 4는 부분적으로 겹친 물품이 컨베이어 밸트로부터 픽업되어 분류 기계의 분류 셀 상으로 배치될 때 본 발명이 어떻게 적용되는지에 대한 일 예를 나타낸다.
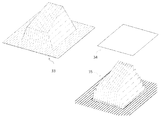
도 5는 본 발명에서 사용되는 광학 검출 장치의 개략도를 나타낸다.
도 6, 7 및 8은 본 발명에서 실행되는 일부 데이타 처리를 나타낸다.
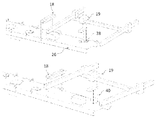
도 9 및 10은 매니퓰레이터(19)를 위한 일부 실제 방안을 나타낸다.
도 11 및 12는 작은 크기의 물품 쌍을 단일의 분류 셀에 로딩하기 위한 구성과 관련된 본 발명의 적용을 일련의 (a), (b), (c) 및 (d)로 나타내고 있다.
도 13은 매니퓰레이터(19)를 이용하여 물품을 픽업하고 이어서 분류 셀 상으로 직접 로딩하는 것에 관한 실시 형태를 나타낸다.
도 14 및 15는 본 발명에 따른 작업 순서의 다른 예를 나타낸다.
Claims (17)
- 분류 기계(1)에 물품을 공급하기 위한 장치로서,
전진 방향(A1)을 따라 물품 또는 소포를 전진시키기 위한 컨베이어 면(26);
물품이 컨베이어 면(26) 상에서 움직이고 있을 때, 물품 표면 상의 결정된 수의 점의 3차원 좌표를 얻고 이 좌표를 좌표 벡터로 조직화할 수 있는 광학 검출 장치(18);
상기 물품을 컨베이어 면(26)으로부터 집고 집힌 물품을 원하는 위치에 배치하기 위해 제공되어 있는 매니퓰레이터(19); 및
컨베이어 면(26) 상에서 움직이고 있는 각 물품에 대해 물품의 3차원 표현을 얻도록 상기 좌표 벡터를 처리하기 위해 제공되어 있는 제어 시스템을 포함하고,
상기 3차원 표현은 상기 제어 시스템이 물품을 집어 배치하기 위한 상기 매니퓰레이터를 취급할 때 근거가 되는 정보를 포함하고,
상기 매니퓰레이터(19)는, 컨베이어 면(26)으로부터 물품을 픽업하고, 또한 물품이 서로 나란히 배치되거나 서로 상하로 부분적으로 겹쳐 있는 변칙적인 경우를 더 해결하기 위해 제공되고, 상기 매니퓰레이터(19)는 물품을 축적 및 컨베이어 면(41) 상에 배치하기 위해 더 제공되어 있고, 그러나, 작은 크기의 물품은 물품의 쌍을 형성하도록 배치되고, 상기 물품의 쌍은 분류 기계의 분류 셀(9)의 후속 작동을 통해 대응하는 목적지로 보내지게 미리 정해진 순서로 분류 기계의 동일한 분류 셀(9) 상에 동시에 로딩되도록 분리 및 배향되어 있는, 분류 기계에 물품을 공급하기 위한 장치. - 제 1 항에 있어서,
상기 제어 시스템에는, 물품이 서로 나란히 배치되거나 서로 상하로 겹쳐 있는 변칙적인 상태를 확인하고 또한 상기 매니퓰레이터(19)의 개입을 통해 상기 변칙적인 상태를 해결하기 위해 좌표 벡터를 분석하기 위한 알고리즘이 제공되어 있는, 분류 기계에 물품을 공급하기 위한 장치. - 제 1 항에 있어서,
상기 광학 검출 장치(18)는, 상기 컨베이어 면(26) 상의 물품의 투영을 검출하기 위해 제공되어 있는 제 1 광학 배리어(22, 23), 및 상기 물품의 수직 윤곽을 검출하기 위해 제공되어 있는 제 2 광학 배리어(24)를 포함하는, 분류 기계에 물품을 공급하기 위한 장치. - 제 1 항에 있어서,
상기 광학 검출 장치(18)는, 컨베이어 면(26) 상에서 움직이고 있는 각 물품의 이미지를 분석하고 물품의 외부 표면 상의 결정된 점들 사이의 거리 및 필요한 3차원 정보를 결정하기 위한 적어도 하나의 3D 비디오 카메라를 포함하는, 분류 기계에 물품을 공급하기 위한 장치. - 제 1 항에 있어서,
물품의 임시 배치를 위한 보조 안착 또는 컨베이어 면을 포함하고, 상기 보조 안착 또는 컨베이어 면에는, 물품을 식별할 수 있는 바코드 또는 다른 코드를 검출하기 위한 장치가 제공되어 있고, 상기 보조 면은 상기 매니퓰레이터(19)가 도달할 수 있도록 위치되어 있는, 분류 기계에 물품을 공급하기 위한 장치. - 제 1 항에 있어서,
컨베이어 방향을 따라 물품들을 서로 이격시키고 또한 물품이 서로 나란히 배치되는 경우를 줄이기 위해 상기 컨베이어 면(26)의 상류에 배치되는 분리 장치(14, 15)를 포함하는, 분류 기계에 물품을 공급하기 위한 장치. - 제 1 항에 있어서,
물품의 식별 코드를 검출하여 상기 제어 시스템에 전달하기 위해 제공되어 있는 적어도 하나의 광학 검출 장치(12), 및 물품의 중량을 검출하기 위해 제공되어 있는 장치를 포함하는, 분류 기계에 물품을 공급하기 위한 장치. - 제 1 항에 있어서,
상기 매니퓰레이터(19)는 하나의 물품을 집거나 또는 2개의 물품을 동시에 집도록 구성되어 있는 집기 장치(36, 40, 38, 39)를 포함하는, 분류 기계에 물품을 공급하기 위한 장치. - 분류 기계로서,
제 1 항 내지 제 8 항 중 어느 한 항에 따른 적어도 하나의 물품 공급 장치(2);
복수의 분류 셀(9)이 제공되어 있는 컨베이어 장치(1);
선택된 특성을 갖는 물품을 수용하기 위한 다양한 출구부를 포함하는 출구부(3);
상기 출구부(3)의 선택된 출구 내에 있는 물품의 언로딩을 결정하기 위해 제공되어 있는 언로딩 수단; 및
각 분류 셀의 위치를 검출하고 추적하며 물품의 로딩 및 언로딩 수단을 제어하기 위한 제어 시스템을 포함하고,
상기 분류 셀 각각에는, 컨베이어 장치(1)의 전진 방향에 수직인 방향으로 움직일 수 있는 컨베이어 면이 제공되어 있고, 상기 컨베이어 면은 하나 또는 두개의 논리적으로 구별되는 영역에서 상기 제어 시스템에 의해 취급되며, 물품은 대응하는 분류 목적지에 따라 미리 결정된 순서로 배치되는, 분류 기계. - 제 9 항에 있어서,
상기 매니퓰레이터(19)는, 상기 기계가 움직이고 있는 중에, 물품을 상기 분류 셀(9) 상에 배치하기에 적합하고, 상기 물품은 자신의 긴 변이 분류 셀(9)의 컨베이어 면의 운동 방향에 평행하게 되도록 배향되는, 분류 기계. - 제 9 항에 있어서,
분류 기계에 물품을 공급하기 위한 상기 장치(2)의 상류에는, 적어도 하나의 컨베이어 면(41)이 배치되어 있고, 상기 매니퓰레이터(19)는 물품의 쌍을 상기 컨베이어 면 상에 로딩하고, 상기 물품의 쌍은, 단일 분류 셀(9)의 후속 작동을 통해 대응하는 목적지로 보내지게 상기 장치(2)에 의해 요구되는 배치에 따라 상기 단일 분류 셀(9) 상에 동시에 로딩되도록 배향 및 배치되는, 분류 기계에 물 - 제 9 항에 있어서,
상기 매니퓰레이터(19)가 도달할 수 있도록 배치되어 있는 회로 컨베이어 장치(55)를 포함하는, 분류 기계. - 제 9 항에 따른 분류 기계에 물품을 공급하기 위한 방법으로서,
물품이 컨베이어 면(26) 또는 회로 컨베이어 장치(55) 상에서 움직이고 있을 때, 광학 검출 장치(18)를 통해 물품의 3차원 표면 상의 점들의 좌표를 검출하는 단계;
제어 시스템이 물품을 선택적으로 집어 배치하기 위한 매니퓰레이터(19)를 취급할 때 근거가 되는 3차원 표현을 각 물품에 대해 얻기 위해 좌표 벡터를 처리하는 단계;
서로 나란히 배치되어 있거나 심지어 서로 상하로 부분적으로 겹쳐 있는 물품을 분리시켜서 상기 매니퓰레이터(19)에 의해 컨베이어 면(26)으로부터 물품을 집는 단계; 및
작은 크기의 물품의 쌍이 먼저 배치되도록, 상기 매니퓰레이터(19)에 의해 픽업된 물품을 상기 공급 장치(2)의 상류에 위치하는 컨베이어 면(41) 상에 배치하는 단계 - 상기 물품의 쌍은, 단일 분류 셀(9)의 후속 작동을 통해 대응하는 목적지로 보내지게 상기 장치(2)에 의해 요구되는 배치에 따라 상기 단일 분류 셀(9) 상에 동시에 로딩되도록 배향 및 배치됨 -;
상기 로딩 장치(2)를 사용하여, 컨베이어 면(41) 상에 배치되어 있는 상기 물품의 쌍을 분류 기계의 분류 셀(9)에 로딩하는 단계;
상기 매니퓰레이터(19)에 의해 픽업되지 않았고 오리엔터(orienter) 컨베이어 면(4)에 의해 공급 장치(2)의 컨베이어 면(5)에 전달된 물품 또는 큰 물품을 공급 장치(2)를 통해 로딩하는 단계; 및
물품을 대응하는 목적지에 보내는 단계를 포함하는, 분류 기계에 물품을 공급하기 위한 방법. - 제 13 항에 있어서,
물품 표면 상의 점 좌표를 처리하는 단계는, 서로 나란히 배치되어 있거나 서로 상하로 부분적으로 겹쳐 있는 물품을 식별하기 위해, 상기 물품의 평면내 윤곽을 규정하는 단계 및 물품의 수직 윤곽을 규정하는 단계를 포함하는, 분류 기계에 물품을 공급하기 위한 방법. - 제 14 항에 있어서,
서로 나란히 배치되어 있거나 서로 상하로 부분적으로 겹쳐 있는 물품은, 매니퓰레이터(19)로부터 제거되어 공급 장치(2)의 컨베이어 면 상으로 배치되거나, 임시 배치를 위한 컨베이어 면 상으로 배치되거나, 또는 움직이고 있는 분류 기계의 분류 셀(9) 상으로 직접 배치되는, 분류 기계에 물품을 공급하기 위한 방법. - 제 13 항에 있어서,
물품이 상기 매니퓰레이터의 집기 장치로부터 벗어나지 않도록 하기 위해, 검출 장치를 사용하여, 높은 가속도의 수직 운동을 통해 물품을 픽업할 때 매니퓰레이터(19)의 유효성을 확인하는 단계를 포함하는, 분류 기계에 물품을 공급하기 위한 방법. - 제 13 항에 있어서,
물품에 대한 위치 코드가 이전에 판독 장치(12)에 의해 검출되지 않은 경우에, 코드 판독 장치가 제공되어 있고 매니퓰레이터(19)가 물품을 임시로 배치하는 지지 및 컨베이어 면을 통해, 상기 위치 코드를 판독하는 단계를 포함하는, 분류 기계에 물품을 공급하기 위한 방법.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| ITMO20140310 | 2014-10-29 | ||
| ITMO2014A000310 | 2014-10-29 | ||
| PCT/IB2015/058119 WO2016067163A1 (en) | 2014-10-29 | 2015-10-21 | A device for feeding items to a sorting machine and sorting machine |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20170077143A true KR20170077143A (ko) | 2017-07-05 |
| KR102048330B1 KR102048330B1 (ko) | 2019-11-25 |
Family
ID=52232337
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020177011858A Active KR102048330B1 (ko) | 2014-10-29 | 2015-10-21 | 분류 기계에 물품을 공급하기 위한 장치 및 분류 기계 |
Country Status (8)
| Country | Link |
|---|---|
| US (1) | US10301122B2 (ko) |
| EP (1) | EP3212546B1 (ko) |
| JP (1) | JP6629853B2 (ko) |
| KR (1) | KR102048330B1 (ko) |
| CN (1) | CN106999987B (ko) |
| BR (1) | BR112017008869B1 (ko) |
| CA (1) | CA2963873C (ko) |
| WO (1) | WO2016067163A1 (ko) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020004920A1 (en) * | 2018-06-27 | 2020-01-02 | Cj Logistics Corporation | Automatic sorting apparatus and system for delivery goods on unloading conveyor belt |
| KR20200025318A (ko) * | 2018-08-30 | 2020-03-10 | 씨제이대한통운 (주) | 통합 물품 분류 시스템 |
| KR102133737B1 (ko) * | 2019-12-02 | 2020-07-14 | 한국기술교육대학교 산학협력단 | 멀티에이전트 강화학습 기반 물품 분류기 제어 시스템 및 그 방법 |
| KR102357783B1 (ko) * | 2020-08-24 | 2022-02-07 | 씨제이대한통운 (주) | 컨베이어 상에 근접 배치된 상품들의 오분류 방지를 위한 상품분류방법 및 시스템 |
| KR20220025337A (ko) * | 2020-08-24 | 2022-03-03 | 씨제이대한통운 (주) | 오분류 방지를 위한 상품분류방법 및 시스템 |
| KR20220088556A (ko) * | 2020-12-18 | 2022-06-28 | 주식회사 에스에프에이 | 로봇 로딩 시스템 |
| WO2024123135A1 (ko) * | 2022-12-08 | 2024-06-13 | 네이버랩스 주식회사 | 물류 자동화 시스템 및 이의 제어 방법 |
Families Citing this family (106)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11542104B2 (en) * | 2016-05-17 | 2023-01-03 | Liebherr-Verzahntechnik Gmbh | Order-picking system |
| DE102016012274A1 (de) | 2016-05-31 | 2017-11-30 | Herbert Kannegiesser Gmbh | Verfahren zum Zuführen von Wäschestücken zu einer Wäscheweiterbehandlungseinrichtung sowie Vorrichtung |
| JP6677115B2 (ja) * | 2016-07-21 | 2020-04-08 | 株式会社ダイフク | 物品並べ替え装置及びそれを備えた物品保管設備 |
| EP3575006B1 (en) * | 2016-08-12 | 2022-12-28 | Amazon Technologies, Inc. | Apparatus for sorting items |
| WO2018059977A1 (fr) * | 2016-09-28 | 2018-04-05 | Grosbois Jerome | Procede de chargemement automatise d'une caisse avec des objets au moyen d'un robot prehenseur |
| NL2017747B1 (en) * | 2016-11-08 | 2018-05-23 | Optimus Sorter Holding B V | Sorting device and method |
| CN110199231B (zh) | 2016-11-08 | 2023-12-15 | 伯克希尔格雷运营股份有限公司 | 用于处理物体的系统和方法 |
| EP4299490A3 (en) | 2016-11-28 | 2024-03-20 | Berkshire Grey Operating Company, Inc. | System for providing singulation of objects for processing |
| CN110049933A (zh) | 2016-12-06 | 2019-07-23 | 伯克希尔格雷股份有限公司 | 用于提供车辆中的物体处理的系统和方法 |
| CN110049934B (zh) | 2016-12-09 | 2022-02-25 | 伯克希尔格雷股份有限公司 | 用于处理在车辆中设置的物品的系统和方法 |
| FR3061042B1 (fr) | 2016-12-22 | 2019-02-01 | Solystic | Equipement pour le tri automatique de colis hors norme |
| EP4527761A3 (en) | 2017-03-17 | 2025-06-11 | Berkshire Grey Operating Company, Inc. | Systems and methods for processing objects including a linear gantry system |
| EP3601108A1 (en) | 2017-03-20 | 2020-02-05 | Berkshire Grey, Inc. | Systems and methods for processing objects including an auto-shuttle system |
| EP3601107A1 (en) | 2017-03-20 | 2020-02-05 | Berkshire Grey, Inc. | Systems and methods for processing objects including mobile matrix carrier systems |
| CA3056782C (en) | 2017-03-20 | 2023-03-14 | Berkshire Grey, Inc. | Systems and methods for processing objects including a zone gantry system |
| CN114852726B (zh) | 2017-03-20 | 2024-01-02 | 伯克希尔格雷营业股份有限公司 | 用于处理包括运输车辆的物体的系统和方法 |
| WO2018175717A1 (en) | 2017-03-22 | 2018-09-27 | Berkshire Grey, Inc. | Systems and methods for processing objects, including automated radial processing stations |
| CA3057367C (en) | 2017-03-23 | 2023-01-10 | Berkshire Grey, Inc. | Systems and methods for processing objects, including automated mobile matrix bins |
| ES2973481T3 (es) | 2017-03-23 | 2024-06-20 | Berkshire Grey Operating Company Inc | Sistema y método para procesar objetos, incluyendo portadores matriciales móviles automatizados |
| EP3601113B1 (en) | 2017-03-24 | 2024-12-18 | Berkshire Grey Operating Company, Inc. | Systems and methods for processing objects, including automated processing |
| IT201700041616A1 (it) * | 2017-04-13 | 2018-10-13 | Ct Pack Srl | Stazione automatica di prelevamento di articoli e relativo procedimento di utilizzo. |
| CN106984549B (zh) * | 2017-04-17 | 2019-05-10 | 上海邮政科学研究院 | 一种用于交叉带分拣机的自动供件台及控制方法 |
| US11205059B2 (en) | 2017-04-18 | 2021-12-21 | Berkshire Grey, Inc. | Systems and methods for separating objects using conveyor transfer with one or more object processing systems |
| US11080496B2 (en) | 2017-04-18 | 2021-08-03 | Berkshire Grey, Inc. | Systems and methods for separating objects using vacuum diverts with one or more object processing systems |
| US11373134B2 (en) | 2018-10-23 | 2022-06-28 | Berkshire Grey Operating Company, Inc. | Systems and methods for dynamic processing of objects with data verification |
| US11055504B2 (en) | 2017-04-18 | 2021-07-06 | Berkshire Grey, Inc. | Systems and methods for separating objects using a vacuum roller with one or more object processing systems |
| US11416695B2 (en) | 2017-04-18 | 2022-08-16 | Berkshire Grey Operating Company, Inc. | Systems and methods for distributing induction of objects to a plurality of object processing systems |
| US11200390B2 (en) | 2017-04-18 | 2021-12-14 | Berkshire Grey, Inc. | Systems and methods for separating objects using drop conveyors with one or more object processing systems |
| US10438034B2 (en) | 2017-04-18 | 2019-10-08 | Berkshire Grey, Inc. | Systems and methods for processing objects including space efficient distribution stations and automated output processing |
| US11301654B2 (en) | 2017-04-18 | 2022-04-12 | Berkshire Grey Operating Company, Inc. | Systems and methods for limiting induction of objects to one or more object processing systems |
| CN114918144B (zh) | 2017-04-24 | 2023-11-17 | 伯克希尔格雷营业股份有限公司 | 提供物体的分离以供处理的系统和方法 |
| JP6592043B2 (ja) * | 2017-07-19 | 2019-10-16 | ファナック株式会社 | ワークを循環する供給装置を備える搬送装置 |
| CN107416539B (zh) * | 2017-07-19 | 2019-07-16 | 上海邮政科学研究院 | 一种自动供件台上件控制系统 |
| CN107678323A (zh) * | 2017-08-16 | 2018-02-09 | 广西柳城县绿之缘生态农业科技有限公司 | 一种食品加工配送控制系统 |
| CH714086A1 (de) * | 2017-08-28 | 2019-02-28 | Wrh Walter Reist Holding Ag | Verfahren und Vorrichtung zum Transferieren von Fördergütern zwischen zwei Fördervorrichtungen sowie ein Fördersystem. |
| CN107563708B (zh) | 2017-09-30 | 2023-04-07 | 北京极智嘉科技股份有限公司 | 物品分拣系统及方法 |
| CN114620398B (zh) | 2017-10-27 | 2024-01-02 | 伯克希尔格雷营业股份有限公司 | 对象处理系统 |
| JP6687591B2 (ja) * | 2017-12-26 | 2020-04-22 | ファナック株式会社 | 物品搬送装置、ロボットシステムおよび物品搬送方法 |
| CN108160507A (zh) * | 2018-01-02 | 2018-06-15 | 杭州佳成国际物流股份有限公司 | 一种无人化物流快递平台系统 |
| JP6659744B2 (ja) * | 2018-01-25 | 2020-03-04 | ファナック株式会社 | ロボットシステム |
| US10843333B2 (en) | 2018-03-05 | 2020-11-24 | Berkshire Grey, Inc. | Systems and methods for processing objects, including automated re-circulating processing stations |
| LU100782B1 (en) * | 2018-04-27 | 2019-10-28 | Soremartec Sa | System for conveying products in succession along an industrial line |
| US10583986B2 (en) * | 2018-05-04 | 2020-03-10 | Berkshire Grey, Inc. | Systems and methods for processing objects, including automated processing stations |
| US11318620B2 (en) | 2018-05-09 | 2022-05-03 | Intelligrated Headquarters, Llc | Method and system for manipulating items |
| US11458635B2 (en) | 2018-05-09 | 2022-10-04 | Intelligrated Headquarters, Llc | Method and system for manipulating articles |
| US10822177B2 (en) | 2018-05-09 | 2020-11-03 | Intelligrated Headquarters, Llc | Method and system for manipulating articles |
| CN108584417A (zh) * | 2018-05-21 | 2018-09-28 | 广东科捷龙机器人有限公司 | 基于机器视觉识别的机械手抓取装配设备 |
| CN108554829B (zh) * | 2018-05-22 | 2024-07-19 | 深圳市驭智装备技术有限公司 | 一种交叉带式物流分拣系统 |
| CN109092696B (zh) * | 2018-07-11 | 2021-02-05 | 深圳市中科视讯智能系统技术有限公司 | 分拣系统及分拣方法 |
| CN108706311B (zh) * | 2018-07-12 | 2024-03-01 | 苏州博涵家居用品有限公司 | 一种自动输送供料机 |
| US11440744B2 (en) | 2018-07-30 | 2022-09-13 | Laitram, L.L.C. | Conveyor package-flow measuring system |
| US11602773B2 (en) * | 2018-09-24 | 2023-03-14 | United States Postal Service | Vision-enhanced photocell system for package sorting |
| CN109261529B (zh) * | 2018-09-26 | 2024-09-03 | 江西扬帆实业有限公司 | 一种双层交叉带分拣机及其空车检测的方法和装置 |
| US11754576B2 (en) | 2018-10-08 | 2023-09-12 | Team Conveyer Intellectual Properties, LLC | Coordinated conveyers in an automated system |
| CN111085448B (zh) | 2018-10-23 | 2022-10-14 | 菜鸟智能物流控股有限公司 | 物流对象处理系统、方法和分拣设备 |
| EP3871172A1 (en) | 2018-10-25 | 2021-09-01 | Berkshire Grey, Inc. | Systems and methods for learning to extrapolate optimal object routing and handling parameters |
| CA3117829A1 (en) * | 2018-10-30 | 2020-05-07 | Berkshire Grey, Inc. | Systems and methods for processing objects including semi-autonomous stations and automated output processing |
| FR3092015B1 (fr) * | 2019-01-24 | 2020-12-25 | Solystic | Systeme de tri/manutention de paquets a convoyeur a plateaux et unite de transfert par gravite |
| CN109834065B (zh) * | 2019-03-07 | 2023-11-24 | 江苏锦明工业机器人自动化有限公司 | 一种用于高速分拣的y型斜口分拣机 |
| CA3216352A1 (en) * | 2019-04-11 | 2020-10-15 | Team Conveyer Intellectual Properties, LLC | Coordinated conveyers in an automated system |
| CN110102490B (zh) * | 2019-05-23 | 2021-06-01 | 北京阿丘机器人科技有限公司 | 基于视觉技术的流水线包裹分拣装置和电子设备 |
| JP7328017B2 (ja) * | 2019-06-11 | 2023-08-16 | ファナック株式会社 | ロボットシステム及び制御装置 |
| US11866224B2 (en) | 2019-06-24 | 2024-01-09 | Berkshire Grey Operating Company, Inc. | Systems and methods for providing shipping of orders in an order fulfillment center |
| KR102230112B1 (ko) * | 2019-06-26 | 2021-03-22 | 김영대 | 소포 분류 시스템 |
| CN112241747B (zh) * | 2019-07-16 | 2024-08-20 | 顺丰科技有限公司 | 物体分拣方法、装置、分拣设备及存储介质 |
| WO2021026359A1 (en) | 2019-08-08 | 2021-02-11 | Berkshire Grey, Inc. | Systems and methods for sorting objects to large numbers of orders |
| JP7389986B2 (ja) * | 2019-08-15 | 2023-12-01 | 大森機械工業株式会社 | 物品搬送供給装置 |
| CN110694918A (zh) * | 2019-09-25 | 2020-01-17 | 石狮市云帆工业设计有限公司 | 一种物件偏离轨道回位分拣的出货分拣轨架 |
| CN112642720B (zh) * | 2019-10-10 | 2023-06-23 | 北京京东乾石科技有限公司 | 一种交叉带分拣机及其应用方法 |
| CN110694919A (zh) * | 2019-10-17 | 2020-01-17 | 威海新北洋正棋机器人股份有限公司 | 机械手及快件分拣设备 |
| CN110694917A (zh) * | 2019-10-17 | 2020-01-17 | 威海新北洋正棋机器人股份有限公司 | 机械手及分拣装置 |
| CN112791962B (zh) * | 2019-11-25 | 2022-10-28 | 科捷智能科技股份有限公司 | 并排包裹的分离方法 |
| CN111036559B (zh) * | 2019-12-31 | 2024-03-15 | 昆船智能技术股份有限公司 | 一种交叉带式多级分拣设备和方法 |
| US11040836B1 (en) | 2020-01-24 | 2021-06-22 | Becton Dickinson Rowa Germany Gmbh | Device and method for separating piece goods |
| US20210260626A1 (en) | 2020-02-26 | 2021-08-26 | InTunes Products, LLC | Package handling and sorting system |
| US12129125B2 (en) | 2020-03-06 | 2024-10-29 | Berkshire Grey Operating Company, Inc. | Systems and methods for providing order fulfillment using a conveyor takeaway system |
| WO2021178835A2 (en) | 2020-03-06 | 2021-09-10 | Berkshire Grey, Inc. | Systems and methods for providing order fulfillment using a recirculating routing system |
| US12269681B2 (en) | 2020-03-06 | 2025-04-08 | Berkshire Grey Operating Company, Inc. | Systems and methods for providing order fulfillment using a routing conveyance system |
| WO2021178830A1 (en) | 2020-03-06 | 2021-09-10 | Berkshire Grey, Inc. | Systems and methods for providing order fulfillment using a spiral tower system |
| JP7796664B2 (ja) | 2020-04-03 | 2026-01-09 | バイマー グループ エーエス | ピックアンドプレースロボットシステム |
| US12059803B2 (en) | 2020-06-22 | 2024-08-13 | Material Handling Systems, Inc. | Conveyor system with multiple robot singulators and buffering conveyor |
| US11753256B2 (en) * | 2020-06-22 | 2023-09-12 | Material Handling Systems, Inc. | Conveyor system with multiple robot singulators |
| CN114313902A (zh) * | 2020-09-30 | 2022-04-12 | 顺丰科技有限公司 | 自动供件装置 |
| TWI747554B (zh) * | 2020-10-15 | 2021-11-21 | 鴻績工業股份有限公司 | 解包系統 |
| CN114433490B (zh) * | 2020-11-04 | 2024-11-29 | 顺丰科技有限公司 | 一种检测物品分拣异常的方法、系统及存储介质 |
| US20220134384A1 (en) * | 2020-11-05 | 2022-05-05 | Beumer Corporation | System and method for separating and singulating postal articles |
| AT524439B1 (de) * | 2021-02-04 | 2022-06-15 | Knapp Ag | System zur Vereinzelung und Identifizierung von Artikeln |
| CN113003096A (zh) * | 2021-03-25 | 2021-06-22 | 北京京东乾石科技有限公司 | 一种移除装置及其物品传送设备 |
| CN113231346B (zh) * | 2021-05-06 | 2023-11-03 | 重庆金裕食品有限公司 | 一种智能食品质量检测机器人 |
| CN113245204B (zh) * | 2021-06-15 | 2022-07-12 | 广东天图物流股份有限公司 | 一种物流自动分拣装置及方法 |
| CN113814178B (zh) * | 2021-09-14 | 2023-04-11 | 浙江华眼视觉科技有限公司 | 一种翻板式分拣机 |
| CN113772312B (zh) * | 2021-09-14 | 2023-10-13 | 深圳市库宝软件有限公司 | 货物运输控制方法、装置、设备、仓储系统及存储介质 |
| JP2023042473A (ja) * | 2021-09-14 | 2023-03-27 | セイコーエプソン株式会社 | 教示方法 |
| WO2023059485A1 (en) | 2021-10-06 | 2023-04-13 | Berkshire Grey Operating Company, Inc. | Dynamic processing of objects provided in elevated vehicles with evacuation systems and methods for receiving objects |
| IT202100025712A1 (it) * | 2021-10-07 | 2023-04-07 | Tiberina Solutions S R L | Sistema per la raccolta e sistemazione di una pluralità di pezzi meccanici di una prima tipologia e di una seconda tipologia all’uscita di un impianto di stampaggio e relativo metodo. |
| WO2023064465A1 (en) | 2021-10-13 | 2023-04-20 | Berkshire Grey Operating Company, Inc. | Robotic put wall systems and methods with mobile destination location assemblies |
| SE547229C2 (en) * | 2021-10-26 | 2025-06-10 | Mp Zenrobotics Oy | Waste Sorting Robot comprising a vacuum conduit having a suction mouth |
| CN114192412B (zh) * | 2021-12-09 | 2024-12-31 | 中邮科技股份有限公司 | 一种物流流水线及物品信息与分拣车绑定的方法 |
| CN114247652B (zh) * | 2021-12-09 | 2024-06-18 | 成都百德邮政专用设备制造有限公司 | 一种物流分拣中心包裹分剔与列队系统及其方法 |
| CN114289320B (zh) * | 2021-12-31 | 2024-03-12 | 中科微至科技股份有限公司 | 一种用于交叉带分拣系统的全自动供件系统 |
| US12441553B2 (en) | 2022-03-23 | 2025-10-14 | Berkshire Grey Operating Company, Inc. | Buffering systems and methods for dynamic processing of objects |
| CH719986A1 (de) | 2022-08-25 | 2024-03-15 | Ferag Ag | Förderanlage. |
| DE102022123248A1 (de) * | 2022-09-13 | 2024-03-14 | Böwe Systec Gmbh | Sortieranlage zum Sortieren von Poststücken sowie Verfahren zur Erfassung einer Belegung von zum Transport von Poststücken verwendeten Ablagen einer Sortieranlage |
| WO2024075378A1 (ja) * | 2022-10-03 | 2024-04-11 | フィブイントラロジスティクス株式会社 | クロスベルトソーター |
| JP7408034B1 (ja) * | 2022-10-03 | 2024-01-04 | フィブイントラロジスティクス株式会社 | クロスベルトソーター |
| CN116750383A (zh) * | 2023-06-08 | 2023-09-15 | 北京京东乾石科技有限公司 | 自动分播装置及方法、物流仓储系统 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20130110280A1 (en) * | 2010-02-24 | 2013-05-02 | Apologistics Gmbh | System and method for separating and order picking articles |
| US20140034456A1 (en) * | 2012-07-31 | 2014-02-06 | Sick Ag | Detection system for installation at a conveyor belt |
Family Cites Families (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2576528B1 (fr) | 1985-01-30 | 1987-03-06 | Hotchkiss Brandt Sogeme | Procede de traitement pour la segregation d'objets |
| JPH05278854A (ja) * | 1992-04-06 | 1993-10-26 | Mitsubishi Heavy Ind Ltd | 製品選別移載方法及び装置 |
| IT1297026B1 (it) | 1997-12-29 | 1999-08-03 | Cml Handling Technology S P A | Metodo ed apparecchiatura ad elevata produttivita' per lo smistamento dei pacchi |
| IT1304005B1 (it) | 1998-06-09 | 2001-03-02 | Resta Srl | Apparecchiatura per immagazzinare temporaneamente manufatti, inparticolare materassi. |
| IT1301696B1 (it) | 1998-06-12 | 2000-07-07 | Cml Handling Technology S P A | Metodo ed apparecchiatura per il caricamento automatico di piu'oggetti ordinati, sulla stessa unita' di una macchina smistatrice |
| CA2451016C (en) * | 2001-08-24 | 2010-01-26 | United Parcel Service Of America, Inc. | Method and apparatus for measuring or estimating the center of gravity, flexibility or length of an object and diverting such object on a high-speed conveyor |
| EP2149831B1 (de) * | 2008-07-31 | 2012-02-01 | Siemens Aktiengesellschaft | Steuerungsverfahren für einen Verbund aus mehreren, hintereinander und/oder nebeneinander angeordneten, mehrachsigen Handlingsgeräten sowie Datenspeichermedium, Steuerungssystem und Verbund |
| US9879976B2 (en) * | 2010-01-20 | 2018-01-30 | Faro Technologies, Inc. | Articulated arm coordinate measurement machine that uses a 2D camera to determine 3D coordinates of smoothly continuous edge features |
| US9607239B2 (en) * | 2010-01-20 | 2017-03-28 | Faro Technologies, Inc. | Articulated arm coordinate measurement machine having a 2D camera and method of obtaining 3D representations |
| DK177381B1 (en) * | 2011-08-16 | 2013-03-04 | Crisplant As | Cross-belt sorting system |
| CN104137051B (zh) * | 2012-02-21 | 2017-06-16 | 亚马逊技术有限公司 | 用于材料处理设施中的产品自动拾取的系统和方法 |
| AU2013290117B2 (en) * | 2012-07-11 | 2017-03-16 | Dematic Corp. | Crossbelt sorter system and method of sorting articles |
| EP2693363B1 (de) * | 2012-07-31 | 2015-07-22 | Sick Ag | Kamerasystem und Verfahren zur Erfassung eines Stromes von Objekten |
| CN103567152B (zh) * | 2012-08-06 | 2017-03-08 | 欧耀多 | 一种邮件分拣输送系统 |
| JP2014113577A (ja) * | 2012-12-12 | 2014-06-26 | Toshiba Corp | 物品区分装置 |
| CN203018325U (zh) * | 2012-12-23 | 2013-06-26 | 郑州牧业工程高等专科学校 | 计算机控制的物流中转分拣系统 |
| JP6415026B2 (ja) * | 2013-06-28 | 2018-10-31 | キヤノン株式会社 | 干渉判定装置、干渉判定方法、コンピュータプログラム |
| ES2739223T3 (es) * | 2013-09-06 | 2020-01-29 | Beumer Group As | Método de individualización y conducción de artículos en un dispositivo clasificador |
| US10017285B2 (en) * | 2014-08-05 | 2018-07-10 | Premier Tech Technologies Ltee | Apparatus and method for grouping and positioning items |
| DE102014017477A1 (de) * | 2014-11-26 | 2016-06-02 | Herbert Kannegiesser Gmbh | Verfahren und Vorrichtung zum Zuführen von Wäschestücken zu einer Mangel oder einer sonstigen Wäschebehandlungseinrichtung |
-
2015
- 2015-10-21 KR KR1020177011858A patent/KR102048330B1/ko active Active
- 2015-10-21 WO PCT/IB2015/058119 patent/WO2016067163A1/en not_active Ceased
- 2015-10-21 JP JP2017523539A patent/JP6629853B2/ja active Active
- 2015-10-21 US US15/521,110 patent/US10301122B2/en active Active
- 2015-10-21 EP EP15800970.4A patent/EP3212546B1/en active Active
- 2015-10-21 BR BR112017008869-0A patent/BR112017008869B1/pt active IP Right Grant
- 2015-10-21 CA CA2963873A patent/CA2963873C/en active Active
- 2015-10-21 CN CN201580058083.2A patent/CN106999987B/zh active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20130110280A1 (en) * | 2010-02-24 | 2013-05-02 | Apologistics Gmbh | System and method for separating and order picking articles |
| US20140034456A1 (en) * | 2012-07-31 | 2014-02-06 | Sick Ag | Detection system for installation at a conveyor belt |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020004920A1 (en) * | 2018-06-27 | 2020-01-02 | Cj Logistics Corporation | Automatic sorting apparatus and system for delivery goods on unloading conveyor belt |
| KR20200025318A (ko) * | 2018-08-30 | 2020-03-10 | 씨제이대한통운 (주) | 통합 물품 분류 시스템 |
| KR102133737B1 (ko) * | 2019-12-02 | 2020-07-14 | 한국기술교육대학교 산학협력단 | 멀티에이전트 강화학습 기반 물품 분류기 제어 시스템 및 그 방법 |
| KR102357783B1 (ko) * | 2020-08-24 | 2022-02-07 | 씨제이대한통운 (주) | 컨베이어 상에 근접 배치된 상품들의 오분류 방지를 위한 상품분류방법 및 시스템 |
| KR20220025337A (ko) * | 2020-08-24 | 2022-03-03 | 씨제이대한통운 (주) | 오분류 방지를 위한 상품분류방법 및 시스템 |
| KR20220088556A (ko) * | 2020-12-18 | 2022-06-28 | 주식회사 에스에프에이 | 로봇 로딩 시스템 |
| WO2024123135A1 (ko) * | 2022-12-08 | 2024-06-13 | 네이버랩스 주식회사 | 물류 자동화 시스템 및 이의 제어 방법 |
| KR20240085950A (ko) * | 2022-12-08 | 2024-06-18 | 네이버랩스 주식회사 | 물류 자동화 시스템 및 이의 제어 방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2016067163A1 (en) | 2016-05-06 |
| CA2963873C (en) | 2020-06-23 |
| JP6629853B2 (ja) | 2020-01-15 |
| CN106999987A (zh) | 2017-08-01 |
| EP3212546B1 (en) | 2021-07-28 |
| US20170349385A1 (en) | 2017-12-07 |
| JP2017533822A (ja) | 2017-11-16 |
| US10301122B2 (en) | 2019-05-28 |
| BR112017008869A2 (pt) | 2017-12-19 |
| BR112017008869B1 (pt) | 2021-12-28 |
| CA2963873A1 (en) | 2016-05-06 |
| KR102048330B1 (ko) | 2019-11-25 |
| CN106999987B (zh) | 2019-08-02 |
| EP3212546A1 (en) | 2017-09-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102048330B1 (ko) | 분류 기계에 물품을 공급하기 위한 장치 및 분류 기계 | |
| US12561538B2 (en) | Systems and methods for separating objects using vacuum diverts with one or more object processing systems | |
| US12182656B2 (en) | Systems and methods for separating objects using drop conveyors with one or more object processing systems | |
| US10906746B2 (en) | Article typing and sorting system | |
| CN109311599B (zh) | 用于处理运动的成件货物的设备和方法,具有用于处理运动的成件货物的设备的输送、处理和/或包装机组 | |
| US9359150B2 (en) | Singulator | |
| US20130110280A1 (en) | System and method for separating and order picking articles | |
| WO2020146480A9 (en) | Systems and methods for separating objects using vacuum diverts with one or more object processing systems | |
| CN212862944U (zh) | 用于处理以至少两个平行排运动的件货的设备 | |
| US12350716B2 (en) | Method and system of feeding groups of products to a processing unit | |
| CN109328173B (zh) | 用于处理以至少一排依次运动的成件货物的方法和设备 | |
| US20220380077A1 (en) | Pick and place device for an apparatus for filling and closing articles | |
| CN114377969A (zh) | 自动上件分拣控制方法 | |
| US12447505B2 (en) | Method for feeding parcels onto a sorting conveyor using a gripper robot with suction cups and an integrated camera | |
| CN217141226U (zh) | 自动上件分拣控制系统 | |
| CN113578759B (zh) | 物品拣选系统上包方法、物品拣选上包系统及分拣系统 | |
| US20250153955A1 (en) | Method and device for moving goods with a load carrier | |
| CN216174311U (zh) | 物品拣选上包系统及分拣系统 | |
| CN223417758U (zh) | 分拣设备 | |
| JP7337537B2 (ja) | 物品判別装置 | |
| CN212531232U (zh) | 用于处理在至少三个排中运动的件货的装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0105 | International application |
Patent event date: 20170428 Patent event code: PA01051R01D Comment text: International Patent Application |
|
| PG1501 | Laying open of application | ||
| A201 | Request for examination | ||
| PA0201 | Request for examination |
Patent event code: PA02012R01D Patent event date: 20171219 Comment text: Request for Examination of Application |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20190228 Patent event code: PE09021S01D |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
Patent event code: PE07011S01D Comment text: Decision to Grant Registration Patent event date: 20190926 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
Comment text: Registration of Establishment Patent event date: 20191119 Patent event code: PR07011E01D |
|
| PR1002 | Payment of registration fee |
Payment date: 20191119 End annual number: 3 Start annual number: 1 |
|
| PG1601 | Publication of registration | ||
| PR1001 | Payment of annual fee |
Payment date: 20221025 Start annual number: 4 End annual number: 4 |
|
| PR1001 | Payment of annual fee |
Payment date: 20241029 Start annual number: 6 End annual number: 6 |