KR20170080949A - 4 바 링크 구조를 갖는 주행 차량(로봇)의 서스펜션 힘 추정 시스템 및 방법 - Google Patents
4 바 링크 구조를 갖는 주행 차량(로봇)의 서스펜션 힘 추정 시스템 및 방법 Download PDFInfo
- Publication number
- KR20170080949A KR20170080949A KR1020150190991A KR20150190991A KR20170080949A KR 20170080949 A KR20170080949 A KR 20170080949A KR 1020150190991 A KR1020150190991 A KR 1020150190991A KR 20150190991 A KR20150190991 A KR 20150190991A KR 20170080949 A KR20170080949 A KR 20170080949A
- Authority
- KR
- South Korea
- Prior art keywords
- suspension
- link
- unit
- angle
- bar
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G17/00—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load
- B60G17/015—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements
- B60G17/018—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements characterised by the use of a specific signal treatment or control method
- B60G17/0182—Resilient suspensions having means for adjusting the spring or vibration-damper characteristics, for regulating the distance between a supporting surface and a sprung part of vehicle or for locking suspension during use to meet varying vehicular or surface conditions, e.g. due to speed or load the regulating means comprising electric or electronic elements characterised by the use of a specific signal treatment or control method involving parameter estimation, e.g. observer, Kalman filter
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2204/00—Indexing codes related to suspensions per se or to auxiliary parts
- B60G2204/10—Mounting of suspension elements
- B60G2204/20—Mounting of accessories, e.g. pump, compressor
- B60G2204/202—Mounting of accessories, e.g. pump, compressor of cables
- B60G2204/2022—Mounting of accessories, e.g. pump, compressor of cables using a suspension element (e.g. link, damper or spring) as part of the electrical circuitry
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2204/00—Indexing codes related to suspensions per se or to auxiliary parts
- B60G2204/40—Auxiliary suspension parts; Adjustment of suspensions
- B60G2204/422—Links for mounting suspension elements
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2400/00—Indexing codes relating to detected, measured or calculated conditions or factors
- B60G2400/05—Attitude
- B60G2400/051—Angle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2600/00—Indexing codes relating to particular elements, systems or processes used on suspension systems or suspension control systems
- B60G2600/18—Automatic control means
- B60G2600/187—Digital Controller Details and Signal Treatment
- B60G2600/1875—Other parameter or state estimation methods not involving the mathematical modelling of the vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2800/00—Indexing codes relating to the type of movement or to the condition of the vehicle and to the end result to be achieved by the control action
- B60G2800/70—Estimating or calculating vehicle parameters or state variables
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Vehicle Body Suspensions (AREA)
Abstract
본 발명에 따르면, 차량(로봇)의 서스펜션 힘 추정을 위해 필요한 초기 측정치를 입력하는 단계, 본체를 구동하여 서스펜션에 힘을 가하는 단계, 링크가 움직이는 각도를 측정하는 단계, 상기 초기 측정치 및 링크가 움직이는 각도를 저장하는 단계, 저장된 초기 측정치와 링크가 움직이는 각도를 토대로 서스펜션에 가해진 힘을 연산하는 단계 및 연산된 결과를 출력하는 단계를 포함한다.
상기와 같은 본 발명에 따르면, 복잡한 과정의 동역학적인 분석을 할 필요가 없고, 고가의 센서들을 사용하지 않고도 쉽게 차량(로봇)의 서스펜션에 가해지는 힘을 추정함으로써 수직항력을 계산할 수 있게 하는 효과가 있다.
Description
도 2는 서스펜션 힘 추정 시스템이 장착된 차량(로봇)을 도시한 도면이다.
도 3은 도 2에서 서스펜션 힘 추정 시스템을 확대한 도면이다.
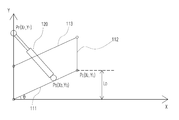
도 4는 도 3에 대하여 2차원 평면에 도시한 도면이다.
도 5는 서스펜션의 구동에 대하여 2차원 평면에 도시한 도면이다.
도 6은 4 바 링크 구조를 갖는 주행 차량(로봇)의 서스펜션 힘 추정 방법의 일 실시예를 순차적으로 도시한 순서도이다.
100 : 구동부 110 : 링크
111 : A바 112 : B바
113 : C바 114 : D바
120 : 서스펜션 200 : 입력부
300 : 각도추출부 400 : 저장부
500 : 제어부 600 : 출력부
Claims (8)
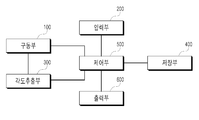
- 하부에 휠이 구비되는 차량(로봇)의 서스펜션 힘 추정 시스템에 있어서,
차체와 휠의 사이에 배치되고 상기 휠의 구동에 따라 동작되는 링크 및 서스펜션을 포함하는 구동부;
상기 구동부의 링크 및 서스펜션에 대한 초기 측정치를 입력하는 입력부;
상기 구동부의 링크가 움직인 각도를 측정하는 각도추출부;
상기 입력부에서 입력되는 초기 측정치 및 상기 각도추출부에서 측정되는 링크가 움직인 각도를 저장하는 저장부;
상기 구동부와 입력부, 각도추출부, 저장부 및 출력부에 연결되어 동작을 제어하고, 상기 입력부에서 입력되는 초기 측정치 및 링크가 움직인 각도를 입력받아 서스펜션에 가해진 힘을 연산하는 제어부;
상기 제어부에서 연산된 결과를 출력하는 출력부를 포함하는 것을 특징으로 하는 4 바 링크 구조를 갖는 주행 차량(로봇)의 서스펜션 힘 추정 시스템.
- 제 1항에 있어서,
상기 구동부는 A바, B바 및 C바로 이루어지는 링크와 서스펜션을 포함하고,
A바의 일측단부는 본체의 일측에 회전가능하게 연결되며,
A바의 타측단부는 B바의 일측단부에 링크연결되고 상기 B바의 일측에는 휠이 장착되며,
상기 B바의 타측단부는 C바의 일측단부에 링크연결되고,
상기 C바의 타측단부는 본체의 다른 일측에 회전가능하게 연결되며,
상기 서스펜션은 일단이 본체의 다른 일측에 회전가능하게 연결되고 타측단부는 A바의 일측에 회전가능하게 연결되는 것을 특징으로 하는 4 바 링크 구조를 갖는 주행 차량(로봇)의 서스펜션 힘 추정 시스템.
- 제 1항에 있어서,
상기 입력부에 입력되는 초기 측정치는 링크의 길이와 링크가 고정되어 있는 위치, 압축되기 전 서스펜션의 길이, 서스펜션의 상단 고정부 좌표, 서스펜션의 하단 고정부 좌표, A바의 단부에서 서스펜션의 단부까지의 거리, 서스펜션의 스프링상수와 서스펜션의 댐핑계수가 포함되는 것을 특징으로 하는 4 바 링크 구조를 갖는 주행 차량(로봇)의 서스펜션 힘 추정 시스템.
- 제 1항에 있어서,
상기 각도추출부는 선형적 특성을 지닌 가변저항을 사용하여 링크가 움직인 각도를 추출하거나 엔코더를 장착하여 링크가 움직인 각도를 측정하는 것을 특징으로 하는 4 바 링크 구조를 갖는 주행 차량(로봇)의 서스펜션 힘 추정 시스템.
- 하부에 휠이 구비되는 차량(로봇)의 서스펜션 힘 추정 방법에 있어서,
상기 입력부에 링크와 서스펜션에 대한 초기 측정치를 입력하는 단계(S100);
상기 제어부가 본체를 구동하여 휠을 구동시키는 단계(S200);
상기 제어부가 각도추출부를 제어하여 휠의 구동에 의해 링크가 움직이는 각도를 측정하는 단계(S300);
상기 제어부가 상기 입력부에서 입력된 초기 측정치 및 상기 각도추출부에서 측정된 링크가 움직이는 각도를 저장부에 저장하는 단계(S400);
상기 제어부가 저장부로부터 상기 초기 측정치 및 링크가 움직이는 각도를 입력받아 서스펜션의 힘을 연산하는 단계(S500);
상기 제어부가 연산된 결과를 출력부를 통해 출력하는 단계(S600)를 포함하는 것을 특징으로 하는 4 바 링크 구조를 갖는 주행 차량(로봇)의 서스펜션 힘 추정 방법.
- 제 5항에 있어서,
상기 제어부는 아래의 [수학식 3]에 따라 서스펜션의 길이 변화량을 연산하는 4 바 링크 구조를 갖는 주행 차량(로봇)의 서스펜션 힘 추정 방법.
[수학식 3]
x = Lsi - Lsp
(여기서, x는 서스펜션의 길이 변화량, Lsi는 서스펜션의 압축되지 않은 전체 길이, Lsp는 서스펜션의 압축된 전체 길이)
- 제 6항에 있어서,
상기 제어부는 아래의 [수학식 2]에 따라 서스펜션의 압축된 전체 길이를 연산하는 4 바 링크 구조를 갖는 주행 차량(로봇)의 서스펜션 힘 추정 방법.
[수학식 2]
Lsp = sqrt((Xf - Xs')^2 + (Yf - Ys')^2)
(여기서, Xf 및 Yf는 본체의 일측에 연결된 서스펜션 단부의 고정좌표, Xs 및 Ys는 서스펜션의 압축된 타측단부의 새로운 좌표)
- 제 5항에 있어서,
상기 제어부는 아래의 [수학식 4]에 따라 서스펜션의 힘을 연산하는 4 바 링크 구조를 갖는 주행 차량(로봇)의 서스펜션 힘 추정 방법.
[수학식 4]
F = Kx + Cx'
(여기서, F는 서스펜션의 힘, K는 스프링 상수, C는 댐핑계수, x'은 x/(sampling time))
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020150190991A KR20170080949A (ko) | 2015-12-31 | 2015-12-31 | 4 바 링크 구조를 갖는 주행 차량(로봇)의 서스펜션 힘 추정 시스템 및 방법 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020150190991A KR20170080949A (ko) | 2015-12-31 | 2015-12-31 | 4 바 링크 구조를 갖는 주행 차량(로봇)의 서스펜션 힘 추정 시스템 및 방법 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20170080949A true KR20170080949A (ko) | 2017-07-11 |
Family
ID=59355018
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020150190991A Ceased KR20170080949A (ko) | 2015-12-31 | 2015-12-31 | 4 바 링크 구조를 갖는 주행 차량(로봇)의 서스펜션 힘 추정 시스템 및 방법 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR20170080949A (ko) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20230056955A (ko) * | 2021-10-21 | 2023-04-28 | 한국기술교육대학교 산학협력단 | 유해 동물 퇴치 로봇 시스템 및 이의 구동 방법 |
| WO2023113065A1 (ko) * | 2021-12-13 | 2023-06-22 | 엘지전자 주식회사 | 로봇 |
-
2015
- 2015-12-31 KR KR1020150190991A patent/KR20170080949A/ko not_active Ceased
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20230056955A (ko) * | 2021-10-21 | 2023-04-28 | 한국기술교육대학교 산학협력단 | 유해 동물 퇴치 로봇 시스템 및 이의 구동 방법 |
| WO2023113065A1 (ko) * | 2021-12-13 | 2023-06-22 | 엘지전자 주식회사 | 로봇 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7493647B2 (ja) | 摩耗量推定装置および摩耗量推定方法 | |
| CN110887978B (zh) | 使用有效载荷系统校准加速度传感器的系统和方法 | |
| US12039812B2 (en) | Tire force estimation system and tire force estimation method | |
| JP7146814B2 (ja) | 軌道検測車および鉛直方向の軌道位置を検出する方法 | |
| KR101478760B1 (ko) | 차량의 가동축 하중 측정장치 및 하중 측정방법 | |
| TW201700977A (zh) | 用於操作一慣性感應器及車輛的方法及車輛 | |
| EP2511111B1 (en) | Vehicle control device | |
| WO2017175840A1 (ja) | 姿勢推定装置及び輸送機器 | |
| KR20170080949A (ko) | 4 바 링크 구조를 갖는 주행 차량(로봇)의 서스펜션 힘 추정 시스템 및 방법 | |
| CN118219743B (zh) | 车辆悬架的控制方法、系统、设备、介质和车辆 | |
| JP2008537521A (ja) | 自動車用のホイールサスペンション | |
| JP5591185B2 (ja) | 車両の位置姿勢測定装置 | |
| JP7469868B2 (ja) | 制動距離予測システムおよび制動距離予測方法 | |
| KR101459683B1 (ko) | 자동차 및 그 제어방법 | |
| JP2021088227A (ja) | 回避走行支援システムおよび回避走行支援方法 | |
| US20150151599A1 (en) | High accuracy load detection for air suspension systems | |
| CN115135519B (zh) | 通过分布式布置的传感器确定车辆的动力学量 | |
| JP6372738B2 (ja) | 車両の重量推定装置 | |
| CN102991297A (zh) | 用于可调节的底盘系统的控制器 | |
| JP2019027874A (ja) | 鉄道車両の異常診断システム | |
| CN115127653A (zh) | 用于牵引车拖车的负载传感 | |
| JP4593351B2 (ja) | 車体傾斜角検出装置 | |
| KR20120026690A (ko) | 자동차용 벡터 속도 계산 방법 | |
| CN120552843B (zh) | 一种纯电动污泥运输车行驶反馈优化调控方法及系统 | |
| KR100558518B1 (ko) | 반능동 현가장치의 수직 가속도 및 속도 측정 방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| PA0109 | Patent application |
St.27 status event code: A-0-1-A10-A12-nap-PA0109 |
|
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| D13-X000 | Search requested |
St.27 status event code: A-1-2-D10-D13-srh-X000 |
|
| D14-X000 | Search report completed |
St.27 status event code: A-1-2-D10-D14-srh-X000 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| T11-X000 | Administrative time limit extension requested |
St.27 status event code: U-3-3-T10-T11-oth-X000 |
|
| E13-X000 | Pre-grant limitation requested |
St.27 status event code: A-2-3-E10-E13-lim-X000 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| E601 | Decision to refuse application | ||
| PE0601 | Decision on rejection of patent |
St.27 status event code: N-2-6-B10-B15-exm-PE0601 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-2-2-P10-P22-nap-X000 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-3-3-R10-R18-oth-X000 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-3-3-R10-R13-asn-PN2301 St.27 status event code: A-3-3-R10-R11-asn-PN2301 |
|
| R11 | Change to the name of applicant or owner or transfer of ownership requested |
Free format text: ST27 STATUS EVENT CODE: A-3-3-R10-R11-ASN-PN2301 (AS PROVIDED BY THE NATIONAL OFFICE) |
|
| R13 | Change to the name of applicant or owner recorded |
Free format text: ST27 STATUS EVENT CODE: A-3-3-R10-R13-ASN-PN2301 (AS PROVIDED BY THE NATIONAL OFFICE) |