KR20170083380A - 이동 장치 - Google Patents
이동 장치 Download PDFInfo
- Publication number
- KR20170083380A KR20170083380A KR1020160002774A KR20160002774A KR20170083380A KR 20170083380 A KR20170083380 A KR 20170083380A KR 1020160002774 A KR1020160002774 A KR 1020160002774A KR 20160002774 A KR20160002774 A KR 20160002774A KR 20170083380 A KR20170083380 A KR 20170083380A
- Authority
- KR
- South Korea
- Prior art keywords
- movement
- mobile device
- present
- flight
- guide
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images








Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C39/00—Aircraft not otherwise provided for
- B64C39/02—Aircraft not otherwise provided for characterised by special use
- B64C39/024—Aircraft not otherwise provided for characterised by special use of the remote controlled vehicle type, i.e. RPV
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C11/00—Propellers, e.g. of ducted type; Features common to propellers and rotors for rotorcraft
- B64C11/46—Arrangements of, or constructional features peculiar to, multiple propellers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C25/00—Alighting gear
- B64C25/32—Alighting gear characterised by elements which contact the ground or similar surface
- B64C25/52—Skis or runners
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C25/00—Alighting gear
- B64C25/32—Alighting gear characterised by elements which contact the ground or similar surface
- B64C25/54—Floats
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C27/00—Rotorcraft; Rotors peculiar thereto
- B64C27/52—Tilting of rotor bodily relative to fuselage
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C39/00—Aircraft not otherwise provided for
- B64C39/02—Aircraft not otherwise provided for characterised by special use
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U30/00—Means for producing lift; Empennages; Arrangements thereof
- B64U30/20—Rotors; Rotor supports
- B64U30/29—Constructional aspects of rotors or rotor supports; Arrangements thereof
- B64U30/296—Rotors with variable spatial positions relative to the UAV body
- B64U30/297—Tilting rotors
-
- B64C2201/024—
-
- B64C2201/108—
-
- B64C2201/12—
-
- B64C2201/165—
-
- B64C2700/6283—
-
- B64F2700/6226—
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U2101/00—UAVs specially adapted for particular uses or applications
Landscapes
- Engineering & Computer Science (AREA)
- Aviation & Aerospace Engineering (AREA)
- Mechanical Engineering (AREA)
- Remote Sensing (AREA)
- Toys (AREA)
- Motorcycle And Bicycle Frame (AREA)
Abstract
본 발명의 일 측면에 따르면, 본체와, 회동이 가능하도록 상기 본체에 설치되는 적어도 하나의 회동 비행 장치와, 상기 본체의 아래쪽으로 연장되는 적어도 하나의 가이드부와, 상기 가이드부를 따라 움직일 수 있도록 설치되는 움직임부와, 상기 움직임부의 움직임에 의해 상기 회동 비행 장치를 회동시켜 추진력의 방향을 변경시키는 작용부를 포함하는 이동 장치를 제공한다.
Description
본 발명은 이동 장치에 관한 것이다.
최근 들어 드론 등의 이동 장치가 많이 개발되고 있다.
이동 장치는 다양한 목적을 위해 설계되고 제작되므로, 그 목적에 따라 다양한 구조를 가질 수 있다.
드론 등의 이동 장치는 주로 비행을 위해 설계되고 있지만, 최근 들어 다양한 장소에 투입될 수 있는 이동 장치의 개발도 이루어지고 있다. 예를 들어, 공개특허공보 2015-0069571호에는 드론에 플로트를 설치하여 수면에 뜰 수 있게 하여 인명을 구조하는 기술이 개시되어 있다.
본 발명의 일 측면에 따르면, 추진력의 방향을 용이하게 변경시킬 수 있는 구조를 가지는 이동 장치를 제공하는 것을 주된 과제로 한다.
본 발명의 일 측면에 따르면, 본체;와, 회동이 가능하도록 상기 본체에 설치되는 적어도 하나의 회동 비행 장치;와, 상기 본체의 아래쪽으로 연장되는 적어도 하나의 가이드부;와, 상기 가이드부를 따라 움직일 수 있도록 설치되는 움직임부;와, 상기 움직임부의 움직임에 의해 상기 회동 비행 장치를 회동시켜 추진력의 방향을 변경시키는 작용부를 포함하는 이동 장치를 제공한다.
여기서, 상기 본체에 설치되는 적어도 하나의 고정 비행 장치를 더 포함할 수 있다.
여기서, 상기 회동 비행 장치는, 적어도 하나의 로터 블레이드와, 상기 로터 블레이드를 구동시키는 로터 구동 장치를 포함할 수 있다.
여기서, 상기 가이드부에 설치되는 지지부를 포함할 수 있다.
여기서, 상기 움직임부에는 가이드 구멍이 형성되고, 상기 가이드 구멍에 상기 가이드부가 끼워져 움직이도록 배치될 수 있다.
여기서, 상기 가이드부에는 돌출부가 형성될 수 있고, 상기 돌출부와 상기 움직임부 사이에는 탄성 부재가 배치될 수 있다.
여기서, 상기 작용부는, 상기 회동 비행 장치에 설치되는 링크 연결부와, 상기 링크 연결부에 회동 가능하도록 설치되며 상기 움직임부를 연결하는 링크 부재를 포함할 수 있다.
여기서, 상기 작용부는, 상기 회동 비행 장치에 설치되며 슬롯을 구비한 연결 부재와, 일부가 상기 연결 부재의 슬롯에 설치되며 상기 움직임부를 연결하는 링크 부재를 포함할 수 있다.
여기서, 상기 움직임부는 접촉하는 유체에 뜨도록 부력을 받을 수 있다.
여기서, 상기 움직임부에는 바퀴, 스노우 보드, 스케이트 블레이드 중 적어도 하나가 설치될 수 있다.
본 발명의 일 측면에 관한 이동 장치는 부력 또는 반력에 의해 회동 비행 장치를 회동시켜 추진력의 방향을 변경시킬 수 있으므로, 공중뿐만 아니라 다양한 장소에서 이동 장치를 효과적으로 운용할 수 있다.
도 1은 본 발명의 제1 실시예에 관한 이동 장치의 모습을 도시한 개략적인 사시도이다.
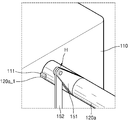
도 2는 본 발명의 제1 실시예에 관한 이동 장치의 회동축이 설치된 모습을 도시한 개략적인 도면이다.
도 3은 본 발명의 제1 실시예에 관한 이동 장치가 수면에 내려 정지한 모습을 도시한 개략적인 측면도이다.
도 4는 본 발명의 제1 실시예에 관한 이동 장치가 비행을 시작할 때의 모습을 도시한 개략적인 측면도이다.
도 5는 본 발명의 제1 실시예에 관한 이동 장치가 비행할 때의 모습을 도시한 개략적인 측면도이다.
도 6은 본 발명의 제1 실시예에 관한 이동 장치가 수면에서 이동하는 모습을 도시한 개략적인 측면도이다.
도 7은 본 발명의 제2 실시예에 관한 이동 장치가 비행할 때의 모습을 도시한 개략적인 측면도이다.
도 8은 본 발명의 제2 실시예에 관한 이동 장치가 눈 표면에서 이동하는 모습을 도시한 개략적인 측면도이다.
도 9는 본 발명의 제3 실시예에 관한 이동 장치가 비행할 때의 모습을 도시한 개략적인 측면도이다.
도 10은 본 발명의 제3 실시예에 관한 이동 장치가 지면에서 이동하는 모습을 도시한 개략적인 측면도이다.
도 2는 본 발명의 제1 실시예에 관한 이동 장치의 회동축이 설치된 모습을 도시한 개략적인 도면이다.
도 3은 본 발명의 제1 실시예에 관한 이동 장치가 수면에 내려 정지한 모습을 도시한 개략적인 측면도이다.
도 4는 본 발명의 제1 실시예에 관한 이동 장치가 비행을 시작할 때의 모습을 도시한 개략적인 측면도이다.
도 5는 본 발명의 제1 실시예에 관한 이동 장치가 비행할 때의 모습을 도시한 개략적인 측면도이다.
도 6은 본 발명의 제1 실시예에 관한 이동 장치가 수면에서 이동하는 모습을 도시한 개략적인 측면도이다.
도 7은 본 발명의 제2 실시예에 관한 이동 장치가 비행할 때의 모습을 도시한 개략적인 측면도이다.
도 8은 본 발명의 제2 실시예에 관한 이동 장치가 눈 표면에서 이동하는 모습을 도시한 개략적인 측면도이다.
도 9는 본 발명의 제3 실시예에 관한 이동 장치가 비행할 때의 모습을 도시한 개략적인 측면도이다.
도 10은 본 발명의 제3 실시예에 관한 이동 장치가 지면에서 이동하는 모습을 도시한 개략적인 측면도이다.
이하, 첨부된 도면을 참조하여 바람직한 실시예에 관한 본 발명을 상세히 설명하기로 한다. 또한, 본 명세서 및 도면에 있어서, 실질적으로 동일한 구성을 갖는 구성 요소에 대해서는, 동일한 부호를 사용함으로써 중복 설명을 생략한다.
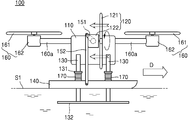
도 1은 본 발명의 제1 실시예에 관한 이동 장치의 모습을 도시한 개략적인 사시도이고, 도 2는 본 발명의 제1 실시예에 관한 이동 장치의 회동축이 설치된 모습을 도시한 개략적인 도면이다.
본 제1 실시예에 관한 이동 장치(100)는 유인 이동 장치, 무인 이동 장치의 종류를 가리지 않고 적용이 가능하다. 즉, 본 발명에 관한 이동 장치는 유인 비행기, 무인 비행기, 유인 헬기, 무인 헬기, 드론 등의 다양한 이동 장치에 제한 없이 적용이 가능하다.
도 1 및 도 2에 도시된 바와 같이, 이동 장치(100)는 본체(110), 회동 비행 장치(120), 가이드부(130), 움직임부(140), 작용부(150), 고정 비행 장치(160), 탄성 부재(170)를 포함하고 있다.
본체(110)는 이동 장치(100)의 배터리 등의 동력원(110a), 통신장치(110b), 메인 제어장치(110c) 등이 설치되는 곳으로써, 프레임, 커버 등으로 이루어져 있다. 여기서 메인 제어 장치(110c)는 이동 장치(100)의 각 구성들을 제어한다.
회동 비행 장치(120)는 이동 장치(100)의 이동을 가능하게 해주는 장치로서 본체(110)에 회동 가능하도록 2개가 대칭으로 설치된다.
회동 비행 장치(120)의 회동축(120a)은 본체(110)에 베어링(미도시) 등으로 연결되어, 회동 비행 장치(120)는 본체(110)에 회동이 가능하도록 설치된다.
도 2에 도시된 바와 같이, 회동축(120a)에는 회전 스토퍼(120a_1)가 형성되어 있는데, 회전 스토퍼(120a_1)는 본체(110)에 형성된 돌기(111)에 걸리도록 구성되어 있으므로 회동축(120a)의 시계 방향 회전 각도를 소정의 각도로 제한할 수 있다. 본 제1 실시예에서는 회동축(120a)의 회전 각도의 변화를 90°로 제한하도록 회전 스토퍼(120a_1) 및 돌기(111)의 위치를 설계한다.
본 제1 실시예에 관한 회동 비행 장치(120)의 회동축(120a)에는 회전 스토퍼(120a_1)가 형성되어 있지만, 본 발명은 이에 한정하지 않는다. 즉, 본 발명에 관한 회동 비행 장치(120)의 회동축(120a)에는 회전 스토퍼(120a_1)가 형성되지 않을 수도 있다.
본 제1 실시예에 관한 회동 비행 장치(120)의 회동축(120a)에는 회전 스토퍼(120a_1)가 1개가 형성되어 있지만, 본 발명은 이에 한정하지 않는다. 즉, 본 발명에 관한 회동 비행 장치(120)의 회동축(120a)에는 회전 스토퍼(120a_1)가 2개가 형성될 수도 있다. 그 경우에 2개의 회전 스토퍼는 회동축(120a)의 시계 방향 회전 각도와 반시계 방향 회전 각도를 함께 제한할 수 있으며, 그에 따라 본체(110)에는 2개의 회전 스토퍼에 걸리는 돌기도 2개가 형성되게 된다.
본 제1 실시예에 관한 회동 비행 장치(120)는 본체(110)에 2개가 대칭으로 설치되지만, 본 발명은 이에 한정하지 않는다. 즉, 본 발명에 관한 회동 비행 장치의 개수에는 특별한 제한이 없다. 예를 들어, 본 발명에 관한 회동 비행 장치의 개수는 1개, 3개, 4개 등이 될 수 있다.
본 제1 실시예에 관한 회동 비행 장치(120)는 로터 블레이드(121)와 로터 블레이드(121)를 회전시켜 구동시키는 로터 구동 장치(122)를 포함한다.
로터 블레이드(121)는 단일의 로터 블레이드를 사용할 수도 있지만, 복수개의 로터 블레이드를 사용할 수도 있다.
로터 구동 장치(122)는 회동축(120a)에 연결된다. 로터 구동 장치(122)로는 모터가 사용되는데, 사용되는 모터로는 스텝 모터, 서보 모터, 일반 직류 모터, 교류 모터 등이 다양하게 적용될 수 있다.
본 제1 실시예에 관한 회동 비행 장치(120)로는 로터 블레이드(121)와 로터 구동 장치(122)가 사용되고 있지만, 본 발명은 이에 한정하지 않는다. 즉, 본 발명에 관한 회동 비행 장치로는 로터 블레이드를 이용한 비행 장치가 사용되지 않고, 유체 추진 장치, 제트 추진 장치 등 다양한 추진 장치를 가지는 비행 장치가 사용될 수 있다.
한편, 가이드부(130)는 본체(110)의 아래쪽으로 연장되도록 본체(110)에 4개가 설치된다.
가이드부(130)는 단면이 원형인 봉 형상을 가지고 있으며 본체(110)의 아래쪽으로 수직으로 연장되도록 배치된다.
본 실시예에 따르면 가이드부(130)는 단면이 원형인 봉 형상을 가지고 있지만, 본 발명은 이에 한정하지 않는다. 즉, 본 발명에 따르면 가이드부를 따라 움직임부(140)가 움직일 수 있기만 하면 되고, 가이드부의 형상에는 특별한 제한이 없다. 예를 들어 가이드부의 형상은 단면이 사각형, 타원형, 다각형 등 다양한 형상을 가질 수 있다.
본 실시예에 따르면 가이드부(130)는 본체(110)에 4개가 설치되지만, 본 발명은 이에 한정하지 않는다. 즉, 본 발명에 따르면 가이드부의 설치 개수에는 특별한 제한이 없다. 예를 들어, 가이드부의 설치 개수는 1개, 2개, 3개, 5개, 6개 등이 될 수 있다.
본 실시예에 따르면 가이드부(130)는 본체(110)의 아래쪽으로 수직으로 연장되도록 배치되지만, 본 발명은 이에 한정하지 않는다. 즉, 본 발명에 따르면 가이드부는 본체(110)의 아래쪽으로 연장되기만 하면 되고, 가이드부(130)의 기울기에 대해서는 특별한 제한이 없다. 예를 들어, 본체(110)의 아래쪽으로 수직선을 그린다면, 가이드부(130)는 그 수직선에 대해 5°, 10°, 15°, 20°, 25°, 30° 등의 다양한 각도를 가질 수 있다.
가이드부(130)에는 돌출부(131)가 형성된다. 돌출부(131)의 크기는 후술하는 움직임부(140)의 가이드 구멍(141)보다 크게 형성되어 있으므로, 가이드부(130)가 지나치게 아래쪽으로 움직이면 돌출부(131)가 가이드 구멍(141)에 걸려 가이드부(130)의 하강 운동이 제한되게 된다. 따라서 돌출부(131)에 의해 본체(110)와 움직임부(140)는 서로 일정 거리를 확보할 수 있게 된다. 아울러 본 제1 실시예의 경우에는 돌출부(131)가 탄성 부재(170)에 고정되어 탄성 부재(170)의 움직임을 제한하는 기능도 수행한다.
본 제1 실시예에 따르면, 돌출부(131)의 크기는 움직임부(140)의 가이드 구멍(141)보다 크게 형성되지만, 본 발명은 이에 한정하지 않는다. 즉 본 발명에 따르면 돌출부(131)의 크기는 후술하는 움직임부(140)의 가이드 구멍(141)보다 작게 형성될 수도 있다.
본 제1 실시예에 따르면, 가이드부(130)에는 돌출부(131)가 형성되지만, 본 발명은 이에 한정하지 않는다. 즉 본 발명에 따르면 가이드부(130)에는 돌출부(131)가 형성되지 않을 수도 있다.
아울러 가이드부(130)의 하부에는 얇은 막대 형상의 지지부(132)가 설치된다.
지지부(132)는 가이드 구멍(141)보다 크게 형성되므로 움직임부(140)의 아래쪽 방향으로의 움직임을 제한한다. 또한 지지부(132)는 이동 장치(100)가 지면 등의 단단한 곳에 착륙할 때 이동 장치(100)를 지지한다.
본 제1 실시예에 따르면, 지지부(132)의 형상은 얇은 막대 형상을 가지고 있지만, 본 발명은 이에 한정하지 않는다. 즉 본 발명에 따르면 지지부(132)의 형상, 구조 등에는 특별한 제한이 없다. 예를 들어, 본 발명에 관한 지지부는 원판의 형상을 가질 수도 있다.
본 제1 실시예에 따르면, 가이드부(130)에는 지지부(132)가 설치되지만, 본 발명은 이에 한정하지 않는다. 즉 본 발명에 따르면 가이드부(130)에는 지지부(132)가 설치되지 않을 수도 있다.
한편, 움직임부(140)는 가이드부(130)를 따라 움직일 수 있도록 설치된다.
움직임부(140)는 부력을 가지도록 설계되는데, 움직임부(140)의 소재, 크기 등은, 「이동 장치가 내려 접촉하게 될 유체」에 이동 장치(100)가 뜰 수 있게 충분한 부력을 받도록 선정되고 설계된다. 여기서, 본 제1 실시예의 경우에는 「이동 장치가 내려 접촉하게 될 유체」로 물을 상정하지만, 행성 탐사 등 특수한 경우에는 「이동 장치가 내려 접촉하게 될 유체」는 물과 비중이 다른 유체가 될 수도 있다.
본 제1 실시예에 따르면 움직임부(140)는, 이동 장치(100)가 접촉하게 될 유체에 이동 장치(100)가 뜨도록 충분한 부력을 받게 설계되지만, 본 발명은 이에 한정하지 않는다. 즉, 본 발명에 따르면 움직임부에 중력의 반대 방향으로 반력을 줄 수 있는 바퀴 장치 등이 설치되고 이동 장치를 평원, 산악 지형 등 바닥이 단단한 지역에서 주로 사용할 경우에는, 움직임부가 받는 부력의 크기는 이동 장치를 유체에 띄울 수 있을 정도가 아니어도 된다.
움직임부(140)에는 가이드부(130)가 끼워져 움직일 수 있는 가이드 구멍(141)이 형성되어 있다.
본 제1 실시예에 따르면 움직임부(140)에는 가이드부(130)가 끼워져 움직일 수 있는 가이드 구멍(141)이 형성되어 있지만, 본 발명은 이에 한정하지 않는다. 즉 본 발명에 따르면 움직임부(140)가 가이드부(130)를 따라 움직일 수 있는 구조를 가지면 되고, 반드시 움직임부(140)에는 구멍이 형성될 필요는 없다. 예를 들어 본 발명에 관한 움직임부(140)에는 구멍 대신에 가이드부(130)가 위치하여 움직일 수 있는 틈, 슬릿 등이 형성될 수 있다.
한편, 작용부(150)는 움직임부(140)의 움직임에 의해 회동 비행 장치(120)을 회동시켜 추진력의 방향을 변경시키는데, 작용부(150)는 링크 연결부(151)와 링크 부재(152)를 포함한다.
링크 연결부(151)는 회동 비행 장치(120)의 회동축(120a)에 설치된다.
본 제1 실시예에 따르면, 링크 연결부(151)가 회동 비행 장치(120)의 회동축(120a)에 설치되지만, 본 발명은 이에 한정하지 않는다. 즉 본 발명에 따르면 링크 연결부(151)는 로터 구동 장치(122)에 직접 설치될 수 있다.
링크 부재(152)의 일부는 링크 연결부(151)에 회동 가능하도록 연결되며, 링크 부재(152)의 타부는 움직임부(140)에 회동 가능하도록 연결된다. 여기서, 회동 가능하도록 연결되는 구조는 일반적으로 링크 연결에 사용되는 힌지 구조(H)가 적용될 수 있다.
본 제1 실시예에 따르면 작용부(150)는 링크 연결부(151)와 링크 부재(152)를 포함하도록 구성되지만, 본 발명은 이에 한정하지 않는다. 즉 본 발명에 관한 작용부는 움직임부(140)의 움직임에 의해 회동 비행 장치(120)를 회동시켜 추진력의 방향을 변경시키기만 하면 되고, 그 외의 작용부의 구성에는 특별한 제한이 없다. 예를 들어 본 발명에 관한 작용부는 본 제1 실시예의 작용부(150)와 다른 형태의 링크 기구, 슬라이드-크랭크 링크 기구, 캠 기구, 캠이 포함된 링크 기구 등 다양한 구조가 적용될 수 있다.
한편, 고정 비행 장치(160)는 이동 장치(100)의 이동을 가능하게 해주는 장치로서 본체(110)에 2개가 대칭으로 설치된다.
고정 비행 장치(160)는 장착부(160a)에 의해 본체(110)에 고정되도록 설치되는데, 이동 장치(100)의 비행을 위해 양력이 발생하도록 설치한다.
본 제1 실시예에 관한 고정 비행 장치(160)는 본체(110)에 2개가 대칭으로 설치되지만, 본 발명은 이에 한정하지 않는다. 즉, 본 발명에 관한 고정 비행 장치의 개수에는 특별한 제한이 없다. 예를 들어, 본 발명에 관한 고정 비행 장치의 개수는 1개, 3개, 4개 등이 될 수 있다.
본 제1 실시예에 관한 고정 비행 장치(160)는 로터 블레이드(161)와 로터 블레이드(161)를 회전시켜 구동시키는 로터 구동 장치(162)를 포함한다.
로터 블레이드(161)는 단일의 로터 블레이드를 사용할 수도 있지만, 복수개의 로터 블레이드를 사용할 수도 있다.
로터 구동 장치(162)는 장착부(160a)에 의해 장착되는데, 로터 구동 장치(162)로는 모터가 사용된다. 로터 구동 장치(162)로 사용되는 모터로는 스텝 모터, 서보 모터, 일반 직류 모터, 교류 모터 등이 다양하게 적용될 수 있다.
본 제1 실시예에 관한 고정 비행 장치(160)로는 로터 블레이드(161)와 로터 구동 장치(162)로서 구동 모터가 사용되고 있지만, 본 발명은 이에 한정하지 않는다. 즉, 본 발명에 관한 고정 비행 장치로는 로터 블레이드를 이용한 비행 장치가 사용되지 않고, 유체 추진 장치, 제트 추진 장치 등 다양한 추진 장치를 가지는 비행 장치가 사용될 수 있다.
한편, 탄성 부재(170)는 원통 코일 스프링의 형상을 가지고 있으며, 가이드부(130)에 끼워져 배치된다. 탄성 부재(170)는 움직임부(140)가 위쪽으로 움직이면 압축되도록 구성된다.
탄성 부재(170)의 직경의 크기는 움직임부(140)의 가이드 구멍(141)보다 크게 형성되고, 탄성 부재(170)의 일단은 돌출부(131)에 고정되어 있으므로, 탄성 부재(170)는 가이드부(130)의 돌출부(131)와 움직임부(140) 사이에 배치된다.
본 제1 실시예에 따르면 탄성 부재(170)의 직경의 크기는 움직임부(140)의 가이드 구멍(141)보다 크게 형성되지만, 본 발명은 이에 한정하지 않는다. 즉 본 발명에 관한 탄성 부재(170)의 직경의 크기는 움직임부(140)의 가이드 구멍(141)보다 크게 형성되지 않을 수도 있다. 그 경우 탄성 부재의 타단은 움직임부(140)에 고정될 수도 있다.
본 제1 실시예에 따르면 이동 장치(100)는 탄성 부재(170)를 포함하고 있지만, 본 발명은 이에 한정하지 않는다. 즉 본 발명에 관한 이동 장치는 탄성 부재를 포함하지 않을 수도 있다. 다만 탄성 부재를 포함하면 움직임부(140)의 갑작스런 움직임에 의해 발생된 충격을 완화시키고, 탄성 복원력에 의해 움직임부(140)의 움직임을 도울 수 있게 된다.
본 제1 실시예에 따르면 탄성 부재(170)는 원통 코일 스프링의 형상을 가지고 있지만, 본 발명은 이에 한정하지 않는다. 즉 본 발명에 관한 탄성 부재는 본체(110)와 움직임부(140) 사이에 설치되어 충격을 완화시키고 탄성력을 작용할 수 있으면 되고, 그 구체적인 형상이나 구조에는 특별한 제한이 없다. 예를 들면, 본 발명에 관한 탄성 부재는 판스프링, 장고형 스프링 등 다양한 형상이나 구조를 가질 수 있다.
이하, 도 3 내지 도 6을 참조로 하여, 본 제1 실시예에 관한 이동 장치(100)의 작동에 대해 설명한다.
도 3은 본 발명의 제1 실시예에 관한 이동 장치가 수면에 내려 정지한 모습을 도시한 개략적인 측면도이고, 도 4는 본 발명의 제1 실시예에 관한 이동 장치가 비행을 시작할 때의 모습을 도시한 개략적인 측면도이다. 또한, 도 5는 본 발명의 제1 실시예에 관한 이동 장치가 비행할 때의 모습을 도시한 개략적인 측면도이고, 도 6은 본 발명의 제1 실시예에 관한 이동 장치가 수면에서 이동하는 모습을 도시한 개략적인 측면도이다.
우선, 이동 장치(100)가 수면에 내려 정지한 상태를 설명한다.
도 3에 도시된 바와 같이, 이동 장치(100)가 수면(S1)에 내린 상태에서는, 본체(110)는 자중에 의해 아래쪽으로 움직이려고 하지만, 움직임부(140)의 부력이 충분하므로 이동 장치(100)는 유체에 뜨게 된다. 이 때 가이드부(130)는 최대로 아래쪽으로 움직인 상태이며, 탄성 부재(170)가 최대로 압축되어 있는 상태가 된다.
이동 장치(100)가 비행을 시작하기 위해서, 메인 제어 장치(110c)는 먼저 고정 비행 장치(160)를 구동시킨다. 비행을 위해 고정 비행 장치(160)의 로터 구동 장치(162)가 구동하게 되면, 로터 블레이드(161)의 회전에 의해 양력이 발생하게 된다. 그렇게 되면 이동 장치(100)는 수면(S1)으로부터 비상하여 움직임부(140)도 수면(S1)으로부터 벗어나게 된다. 이 때 움직임부(140)는 그 자중 및 탄성 부재(170)의 탄성력에 의해 가이드부(130)를 따라 아래쪽으로 움직이게 되고, 이어 움직임부(140)는 지지부(132)에 닿아 움직임이 멈추게 된다. 이러한 과정에서, 도 4에 도시된 바와 같이, 움직임부(140)에 연결된 링크 부재(152)도 아래쪽으로 이동하고, 링크 부재(152)에 연결된 링크 연결부(151)도 회동축(120a)과 함께 반시계 방향으로 회전하게 되므로, 회동 비행 장치(120)는 회동축(120a)을 중심으로 반시계 방향으로 회동되게 된다.
이어, 메인 제어 장치(110c)는 회동 비행 장치(120)의 로터 구동 장치(122)를 구동시킨다. 그렇게 되면, 도 5에 도시된 바와 같이, 회동 비행 장치(120)의 추진력도 비행을 하는데 도움을 주게 되므로, 이동 장치(100)는 본격적인 「비행 모드」에 돌입하여 비행을 수행하게 된다.
한편, 이동 장치(100)가 도 5의 「비행 모드」 상태에 있다가 「수상 이동 모드」로 전환하기 위해 수면에 내릴 경우, 움직임부(140)가 수면에 닿게 되어 부력이 작용하기 시작하면, 본체(110)와 움직임부(140)의 상대 움직임이 발생하게 된다. 즉, 본체(110)는 자중에 의해 아래쪽으로 움직이려고 하지만, 움직임부(140)의 부력이 충분하므로 이동 장치(100)는 유체에 뜨게 된다. 이러한 과정에서, 탄성 부재(170)가 압축되고 움직임부(140)에 연결된 링크 부재(152)가 위쪽으로 이동하며, 링크 부재(152)에 연결된 링크 연결부(151)가 회동축(120a)과 함께 시계 방향으로 회전하게 되고, 따라서 로터 구동 장치(122)도 회동축(120a)을 중심으로 시계 방향으로 회전하게 되어, 도 3에 도시된 상태가 된다.
한편, 이동 장치(100)가 수면에 내린 상태에서 「수상 이동 모드」로 이동을 수행하고자 할 때에는, 도 6에 도시된 바와 같이, 메인 제어 장치(110c)는 고정 비행 장치(160)의 작동을 시키지 않고, 회동 비행 장치(120)의 로터 구동 장치(122)만을 구동한다.
그렇게 되면, 회동 비행 장치(120)의 추진력에 의해 수면(S1)에 평행한 방향의 힘이 작용하게 되고, 이동 장치(100)는 수면에 뜬 상태로 D 방향으로 움직이게 된다. 한편, 본 제1 실시예의 경우에는 회동 비행 장치(120)가 대칭으로 2개가 설치되어 있으므로, 각각의 회동 비행 장치(120)의 구동을 조정함으로써 수면에서 이동 시 이동 방향을 용이하게 조종할 수 있게 된다.
이상과 같이, 본 제1 실시예에 관한 이동 장치(100)는 비행이 가능할 뿐만 아니라, 수면에 내리게 되면 부력에 의한 움직임부(140)의 움직임이 발생하고 그러한 움직임부(140)의 움직임에 의해 회동 비행 장치(120)가 회동됨으로써 추진력의 방향을 변경시킬 수 있다. 따라서 이동 장치(100)는 「수상 이동 모드」시 별도의 스크류 장치 등의 구성이 없어도 수면에 뜬 상태로 이동이 가능하므로, 구조가 간단해지고, 운용 시 「비행 모드」와 「수상 이동 모드」의 상호 전환이 용이하다.
또한, 본 제1 실시예에 관한 이동 장치(100)에 따르면, 이동 장치(100)가 「수상 이동 모드」로 이동할 때에는 고정 비행 장치(160)를 구동하지 않을 수 있어 에너지를 절약할 수 있으므로, 이동 장치(100)의 활용 시간과 이동 범위를 증가시킬 수 있다.
이하, 도 7 및 도 8을 참조하여, 본 발명의 제2 실시예에 관한 이동 장치(200)에 관하여 설명하되, 전술한 본 발명의 제1 실시예의 이동 장치(100)와 상이한 사항을 중심으로 하여 설명한다.
도 7은 본 발명의 제2 실시예에 관한 이동 장치가 비행할 때의 모습을 도시한 개략적인 측면도이고, 도 8은 제2 실시예에 관한 이동 장치가 눈 표면에서 이동하는 모습을 도시한 개략적인 측면도이다.
본 제2 실시예의 이동 장치(200)의 본체(210), 회동 비행 장치(220), 가이드부(230), 작용부(250), 고정 비행 장치(260), 탄성 부재(270)는, 전술한 본 제1 실시예의 이동 장치(100)의 본체(110), 회동 비행 장치(120), 가이드부(130), 작용부(150), 고정 비행 장치(160), 탄성 부재(170)와 그 구성, 작용 등이 동일하므로, 자세한 설명은 생략한다.
한편, 본 제2 실시예의 이동 장치(200)의 구성은 전술한 이동 장치(100)의 구성과 다른 부분이 존재하므로, 이하 설명한다.
움직임부(240)는 가이드부(230)를 따라 움직일 수 있도록 설치되며, 움직임부(240)에는 가이드부(230)가 끼워져 움직일 수 있는 가이드 구멍(241)이 형성되어 있다.
움직임부(240)의 아래쪽으로는 눈 위를 움직일 수 있는 스노우 보드(242)가 설치되고, 스노우 보드(242)는 보드 지지부(243)로 움직임부(240)에 설치된다. 보드 지지부(243)의 상하 방향 길이는 이동 장치(200)가 눈 표면(S2)에 내릴 때 지지부(232)가 눈 표면(S2)에 닿지 않도록 충분한 길이를 가지도록 설계된다.
본 제2 실시예의 이동 장치(200)에 따르면, 움직임부(240)의 아래쪽으로는 눈 위를 움직일 수 있는 스노우 보드(242)가 설치되지만, 본 발명은 이에 한정하지 않는다. 즉, 본 제2 실시예의 이동 장치(200)는 눈 위를 이동할 수 있도록 설계된 것이므로 스노우 보드(242)가 설치되지만, 전술한 바와 같이, 지면 이동용으로는 바퀴, 얼음 이동용으로는 스케이드 블레이드 등이 설치될 수 있다.
이하, 도 7 및 도 8을 참조로 하여, 본 제2 실시예의 이동 장치(200)의 작동에 대해 설명한다.
이동 장치(200)가 비행을 시작하기 위해서, 메인 제어 장치(210c)는 먼저 고정 비행 장치(260)를 구동시킨다. 비행을 위해 고정 비행 장치(260)의 로터 구동 장치(262)가 구동하게 되면, 로터 블레이드(261)의 회전에 의해 양력이 발생하게 된다. 그렇게 되면 이동 장치(200)는 눈 표면(S2)으로부터 비상하여 스노우 보드(242)도 눈 표면(S2)으로부터 위쪽으로 비상하게 된다. 이 때 움직임부(240)는 그 자중 및 탄성 부재(270)의 탄성력에 의해 가이드부(230)를 따라 아래쪽으로 움직이게 되고, 이어 움직임부(240)는 지지부(232)에 닿아 움직임이 멈추게 된다.
이러한 과정에서, 움직임부(240)에 연결된 링크 부재(252)도 아래쪽으로 이동하고, 링크 부재(252)에 연결된 링크 연결부(251)도 회동축(220a)과 함께 반시계 방향으로 회전하게 되므로, 회동 비행 장치(220)는 회동축(220a)을 중심으로 회동되게 된다.
이어, 메인 제어 장치(210c)는 회동 비행 장치(220)의 로터 구동 장치(222)를 구동시킨다. 그렇게 되면, 도 7에 도시된 바와 같이, 회동 비행 장치(220)의 추진력도 비행을 하는데 도움을 주게 되므로, 이동 장치(200)는 본격적인 「비행 모드」에 돌입하여 비행을 수행하게 된다.
한편, 이동 장치(200)가 도 7의 「비행 모드」 상태에 있다가 눈 표면(S2)에 내릴 때에는, 스노우 보드(242)가 눈 표면(S2)에 닿게 되어 반력 F가 작용하기 시작하면, 본체(210)와 움직임부(240)의 상대 움직임이 발생하게 된다. 즉, 본체(210)는 자중에 의해 아래쪽으로 움직이려고 하고, 눈 표면(S2)으로부터 스도우 보드(242)에 반력 F가 작용하므로 본체(210)와 움직임부(240) 사이의 간격이 줄어들게 된다.
이러한 과정에서, 탄성 부재(270)가 압축되고, 움직임부(240)에 연결된 링크 부재(252)가 위쪽으로 이동하고, 링크 부재(252)에 연결된 링크 연결부(251)가 회동축(220a)과 함께 시계 방향으로 회전하게 되고, 따라서 로터 구동 장치(222)도 회동축(220a)을 중심으로 시계 방향으로 회전하게 된다.
한편, 이동 장치(200)가 눈 표면(S2)에 내린 상태에서 「설상 이동 모드」로 이동을 수행하고자 할 때에는, 도 8에 도시된 바와 같이, 메인 제어 장치(210c)는 고정 비행 장치(260)의 작동을 시키지 않고, 회동 비행 장치(220)의 로터 구동 장치(222)만을 구동한다.
그렇게 되면, 회동 비행 장치(220)의 추진력에 의해 눈 표면(S2)에 평행한 방향의 힘이 작용하게 되고, 이동 장치(200)는 눈 표면(S2) 상에서 D 방향으로 움직이게 된다. 한편, 본 제2 실시예의 경우에도 회동 비행 장치(220)가 대칭으로 2개가 설치되어 있으므로, 각각의 회동 비행 장치(220)의 구동을 조정함으로써 눈 표면에서 이동 시 이동 방향을 용이하게 조종할 수 있게 된다.
이상과 같이, 본 제2 실시예에 관한 이동 장치(200)는 비행이 가능할 뿐만 아니라, 눈 표면(S2)에 내리게 되면 스노우 보드(242)에 작용하는 반력에 의해 움직임부(240)의 움직임이 발생하고 그러한 움직임부(240)의 움직임에 의해 회동 비행 장치(220)가 회동됨으로써 추진력의 방향을 변경시킬 수 있다. 따라서 이동 장치(200)는 「설상 이동 모드」시 별도의 무한 궤도 장치 등의 구성이 없어도 눈 표면(S2) 상에서 이동이 가능하므로, 구조가 간단해지고, 운용 시 「비행 모드」와 「설상 이동 모드」의 상호 전환이 용이하다.
또한, 본 제2 실시예에 관한 이동 장치(200)에 따르면, 이동 장치(200)가 「설상 이동 모드」로 이동할 때에는 고정 비행 장치(260)를 구동하지 않을 수 있어 에너지를 절약할 수 있으므로, 이동 장치(200)의 활용 시간과 이동 범위를 증가시킬 수 있다.
이상과 같이 살펴본 구성, 작용 및 효과 외의 본 발명의 제2 실시예에 관한 이동 장치(200)의 구성, 작용 및 효과는, 상기 본 발명의 제1 실시예에 관한 이동 장치(100)의 구성, 작용 및 효과와 동일하므로, 본 설명에서는 생략하기로 한다.
이하, 도 9 및 도 10을 참조하여, 본 발명의 제3 실시예에 관한 이동 장치(300)에 관하여 설명하되, 전술한 본 발명의 제1 실시예의 이동 장치(100)와 상이한 사항을 중심으로 하여 설명한다.
도 9는 본 발명의 제3 실시예에 관한 이동 장치가 비행할 때의 모습을 도시한 개략적인 측면도이고, 도 10은 본 발명의 제3 실시예에 관한 이동 장치가 지면에서 이동하는 모습을 도시한 개략적인 측면도이다.
본 제3 실시예의 이동 장치(300)의 본체(310), 회동 비행 장치(320), 가이드부(330), 고정 비행 장치(360)는, 전술한 본 제1 실시예의 이동 장치(100)의 본체(110), 회동 비행 장치(120), 가이드부(130), 고정 비행 장치(160)와 그 구성, 작용 등이 동일하므로, 자세한 설명은 생략한다.
한편, 본 제3 실시예의 이동 장치(300)의 구성은 전술한 이동 장치(100)의 구성과 다른 부분이 존재하므로, 이하 설명한다.
움직임부(340)는 가이드부(330)를 따라 움직일 수 있도록 설치되며, 움직임부(340)에는 가이드부(330)가 끼워져 움직일 수 있는 가이드 구멍(341)이 형성되어 있다.
움직임부(340)의 아래쪽으로는 지면에서 움직일 수 있는 바퀴(342)가 설치되고, 바퀴(342)는 바퀴 지지부(343)로 움직임부(340)에 설치된다. 바퀴 지지부(343)의 상하 방향 길이는 이동 장치(300)가 지면(S3)에 내릴 때 지지부(332)가 지면(S3)에 닿지 않도록 충분한 길이를 가지도록 설계된다.
본 제3 실시예의 이동 장치(300)에 따르면, 움직임부(340)의 아래쪽으로는 지면에서 움직일 수 있는 바퀴(342)가 설치되지만, 본 발명은 이에 한정하지 않는다. 즉, 본 제3 실시예의 이동 장치(300)는 지면에서 이동할 수 있도록 설계된 것이므로 바퀴(342)가 설치되지만, 전술한 바와 같이, 설상 이동용의 스노우 보드, 얼음 이동용으로는 스케이드 블레이드 등이 설치될 수 있다.
한편, 작용부(350)는 움직임부(340)의 움직임에 의해 회동 비행 장치(320)을 회동시켜 추진력의 방향을 변경시키는데, 작용부(350)는 연결 부재(351)와 링크 부재(352)를 포함한다.
연결 부재(351)는 슬롯(351a)을 구비하고 있으며, 회동 비행 장치(320)의 회동축(320a)에 설치된다.
본 제3 실시예에 따르면, 연결 부재(351)가 회동 비행 장치(320)의 회동축(320a)에 설치되지만, 본 발명은 이에 한정하지 않는다. 즉 본 발명에 따르면 연결 부재(351)는 로터 구동 장치(322)에 직접 설치될 수 있다.
링크 부재(352)의 일부는 연결 부재(351)의 슬롯(351a)에 회동 가능하도록 연결되어 있어 슬롯(351a)의 내면을 따라 슬라이딩 이동이 가능하며, 링크 부재(352)의 타부는 움직임부(340)에 회동 가능하도록 연결된다. 여기서, 회동 가능하도록 연결되는 구조는 일반적으로 링크 연결에 사용되는 힌지 구조(H)가 적용될 수 있다.
한편, 본 제3 실시예에 따른 이동 장치(300)는 본 제1 실시예의 탄성 부재(170)에 대응하는 구성을 포함하지 않지만, 본 발명은 이에 한정하지 않는다. 즉, 본 제3 실시예에 따른 이동 장치(300)는 본 제1 실시예의 탄성 부재(170)에 대응하는 구성을 포함할 수 있다.
이하, 도 9 및 도 10을 참조로 하여, 본 제3 실시예의 이동 장치(300)의 작동에 대해 설명한다.
이동 장치(300)가 비행을 시작하기 위해서, 메인 제어 장치(310c)는 먼저 고정 비행 장치(360)를 구동시킨다. 비행을 위해 고정 비행 장치(360)의 로터 구동 장치(362)가 구동하게 되면, 로터 블레이드(361)의 회전에 의해 양력이 발생하게 된다. 그렇게 되면 이동 장치(300)는 지면(S3)으로부터 비상하여 바퀴(342)도 지면(S3)으로부터 위쪽으로 비상하게 된다. 이 때 움직임부(340)는 그 자중에 의해 가이드부(330)를 따라 아래쪽으로 움직이게 되고, 이어 움직임부(340)는 지지부(332)에 닿아 움직임이 멈추게 된다.
이러한 과정에서, 움직임부(340)에 연결된 링크 부재(352)도 아래쪽으로 이동하고, 링크 부재(352)의 일단은 연결 부재(351)의 슬롯(351a)을 따라 움직여 연결 부재(351)도 회동축(320a)과 함께 반시계 방향으로 회전하게 되므로, 회동 비행 장치(320)는 회동축(320a)을 중심으로 회동되게 된다.
이어, 메인 제어 장치(310c)는 회동 비행 장치(320)의 로터 구동 장치(322)를 구동시킨다. 그렇게 되면, 도 9에 도시된 바와 같이, 회동 비행 장치(320)의 추진력도 비행을 하는데 도움을 주게 되므로, 이동 장치(300)는 본격적인 「비행 모드」에 돌입하여 비행을 수행하게 된다.
한편, 이동 장치(300)가 도 9의 「비행 모드」 상태에 있다가 지면(S3)에 내릴 때에는, 바퀴(342)가 지면(S3)에 닿게 되어 반력 F가 작용하기 시작하면, 본체(310)와 움직임부(340)의 상대 움직임이 발생하게 된다. 즉, 본체(310)는 자중에 의해 아래쪽으로 움직이려고 하고, 지면(S3)으로부터 바퀴(342)에 반력 F가 작용하므로 본체(310)와 움직임부(340) 사이의 간격이 줄어들게 된다.
이러한 과정에서, 움직임부(340)에 연결된 링크 부재(352)가 위쪽으로 이동하고, 링크 부재(352)에 연결된 연결 부재(351)가 회동축(320a)과 함께 시계 방향으로 회전하게 되고, 따라서 로터 구동 장치(322)도 회동축(320a)을 중심으로 시계 방향으로 회전하게 된다.
한편, 이동 장치(300)가 지면(S3)에 내린 상태에서 「지상 이동 모드」로 이동을 수행하고자 할 때에는, 도 10에 도시된 바와 같이, 메인 제어 장치(310c)는 고정 비행 장치(360)의 작동을 시키지 않고, 회동 비행 장치(320)의 로터 구동 장치(322)만을 구동한다.
그렇게 되면, 회동 비행 장치(320)의 추진력에 의해 지면(S3)에 평행한 방향의 힘이 작용하게 되고, 이동 장치(300)는 지면(S3) 상에서 D 방향으로 움직이게 된다. 한편, 본 제3 실시예의 경우에도 회동 비행 장치(320)가 대칭으로 2개가 설치되어 있으므로, 각각의 회동 비행 장치(320)의 구동을 조정함으로써 지면에서 이동 시 이동 방향을 용이하게 조종할 수 있게 된다.
이상과 같이, 본 제3 실시예에 관한 이동 장치(300)는 비행이 가능할 뿐만 아니라, 지면(S3)에 내리게 되면 바퀴(342)에 작용하는 반력에 의해 움직임부(340)의 움직임이 발생하고 그러한 움직임부(340)의 움직임에 의해 회동 비행 장치(320)가 회동됨으로써 추진력의 방향을 변경시킬 수 있다. 따라서 이동 장치(300)는 「지상 이동 모드」시 별도의 바퀴 구동 장치 등의 구성이 없어도 지면(S3)상에서 이동이 가능하므로, 구조가 간단해지고, 운용 시 「비행 모드」와 「지상 이동 모드」의 상호 전환이 용이하다.
또한, 본 제3 실시예에 관한 이동 장치(300)에 따르면, 이동 장치(300)가 「지상 이동 모드」로 이동할 때에는 고정 비행 장치(360)를 구동하지 않을 수 있어, 에너지를 절약할 수 있으므로, 이동 장치(300)의 활용 시간과 이동 범위를 증가시킬 수 있다.
이상과 같이 살펴본 구성, 작용 및 효과 외의 본 발명의 제3 실시예에 관한 이동 장치(300)의 구성, 작용 및 효과는, 상기 본 발명의 제1 실시예에 관한 이동 장치(100)의 구성, 작용 및 효과와 동일하므로, 본 설명에서는 생략하기로 한다.
본 발명의 일 측면들은 첨부된 도면에 도시된 실시예들을 참고로 설명되었으나, 이는 예시적인 것에 불과하며, 당해 기술분야에서 통상의 지식을 가진 자라면 이로부터 다양한 변형 및 균등한 타 실시예가 가능하다는 점을 이해할 수 있을 것이다. 따라서, 본 발명의 진정한 보호 범위는 첨부된 청구 범위에 의해서만 정해져야 할 것이다.
본 발명은 이동 장치를 제조하는 산업에 사용될 수 있다.
100, 200, 300: 이동 장치
110, 210, 310: 본체
120, 220, 320: 회동 비행 장치 130, 230, 330: 가이드부
140, 240, 340: 움직임부 150, 250, 350: 작용부
160, 260, 360: 고정 비행 장치 170, 270: 탄성 부재
120, 220, 320: 회동 비행 장치 130, 230, 330: 가이드부
140, 240, 340: 움직임부 150, 250, 350: 작용부
160, 260, 360: 고정 비행 장치 170, 270: 탄성 부재
Claims (10)
- 본체;
회동이 가능하도록 상기 본체에 설치되는 적어도 하나의 회동 비행 장치;
상기 본체의 아래쪽으로 연장되는 적어도 하나의 가이드부;
상기 가이드부를 따라 움직일 수 있도록 설치되는 움직임부; 및
상기 움직임부의 움직임에 의해 상기 회동 비행 장치를 회동시켜 추진력의 방향을 변경시키는 작용부를 포함하는 이동 장치. - 제1항에 있어서,
상기 본체에 설치되는 적어도 하나의 고정 비행 장치를 더 포함하는 이동 장치. - 제1항에 있어서,
상기 회동 비행 장치는, 적어도 하나의 로터 블레이드와, 상기 로터 블레이드를 구동시키는 로터 구동 장치를 포함하는 이동 장치. - 제1항에 있어서,
상기 가이드부에 설치되는 지지부를 포함하는 이동 장치. - 제1항에 있어서,
상기 움직임부에는 가이드 구멍이 형성되고, 상기 가이드 구멍에 상기 가이드부가 끼워져 움직이도록 배치되는 이동 장치. - 제1항에 있어서,
상기 가이드부에는 돌출부가 형성되고, 상기 돌출부와 상기 움직임부 사이에는 탄성 부재가 배치되는 이동 장치. - 제1항에 있어서,
상기 작용부는,
상기 회동 비행 장치에 설치되는 링크 연결부와, 상기 링크 연결부에 회동 가능하도록 설치되며 상기 움직임부를 연결하는 링크 부재를 포함하는 이동 장치. - 제1항에 있어서,
상기 작용부는,
상기 회동 비행 장치에 설치되며 슬롯을 구비한 연결 부재와, 일부가 상기 연결 부재의 슬롯에 설치되며 상기 움직임부를 연결하는 링크 부재를 포함하는 이동 장치. - 제1항에 있어서,
상기 움직임부는 접촉하는 유체에 뜨도록 부력을 받는 이동 장치. - 제1항에 있어서,
상기 움직임부에는 바퀴, 스노우 보드, 스케이트 블레이드 중 적어도 하나가 설치되는 이동 장치.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020160002774A KR20170083380A (ko) | 2016-01-08 | 2016-01-08 | 이동 장치 |
| PCT/KR2016/002838 WO2017119546A1 (ko) | 2016-01-08 | 2016-03-22 | 이동 장치 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020160002774A KR20170083380A (ko) | 2016-01-08 | 2016-01-08 | 이동 장치 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20170083380A true KR20170083380A (ko) | 2017-07-18 |
Family
ID=59273969
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020160002774A Withdrawn KR20170083380A (ko) | 2016-01-08 | 2016-01-08 | 이동 장치 |
Country Status (2)
| Country | Link |
|---|---|
| KR (1) | KR20170083380A (ko) |
| WO (1) | WO2017119546A1 (ko) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102119424B1 (ko) * | 2018-12-03 | 2020-06-08 | 순천향대학교 산학협력단 | 다목적 드론 |
| CN111661337A (zh) * | 2020-06-22 | 2020-09-15 | 安徽九洲农业科技有限公司 | 一种农业无人机挂载装置 |
| KR20210010966A (ko) * | 2019-07-17 | 2021-01-29 | 김호영 | 다목적 운행체 |
| KR20210084750A (ko) * | 2019-12-27 | 2021-07-08 | 한국전력공사 | 대형 구조물 유지 보수 장치 |
| CN115535279A (zh) * | 2021-12-15 | 2022-12-30 | 聊城市茌平区润德勘察测绘有限公司 | 一种测绘地理信息用无人机勘测系统及其使用方法 |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR3048413A1 (fr) * | 2016-03-03 | 2017-09-08 | Airbus Helicopters | Aeronef muni d'un systeme de flottabilite, et procede de flottabilite |
| CN109850135B (zh) * | 2019-04-04 | 2024-01-30 | 北京零偏科技有限责任公司 | 一种无人机起落架 |
| CN113415413A (zh) * | 2021-07-21 | 2021-09-21 | 靳军 | 一种飞机降落拓展系统 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006224686A (ja) * | 2005-02-15 | 2006-08-31 | Hiyo Kokuki Seizo Kaihatsu Kk | 動的支持装置を有する水上飛行機 |
| JP2009045986A (ja) * | 2007-08-17 | 2009-03-05 | Mitsubishi Heavy Ind Ltd | ヘリコプタ |
| ATE544676T1 (de) * | 2009-12-30 | 2012-02-15 | Agustawestland Spa | Einziehfahrwerk für einen hubschrauber |
| KR20150140172A (ko) * | 2014-06-05 | 2015-12-15 | 대우조선해양 주식회사 | 드론 비행체를 이용한 해저 스캐닝 탐사 시스템 및 그 드론 비행체 |
| KR20150069571A (ko) * | 2015-06-03 | 2015-06-23 | 노인철 | 드론을 이용한 익수자 구조 방법 |
-
2016
- 2016-01-08 KR KR1020160002774A patent/KR20170083380A/ko not_active Withdrawn
- 2016-03-22 WO PCT/KR2016/002838 patent/WO2017119546A1/ko not_active Ceased
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102119424B1 (ko) * | 2018-12-03 | 2020-06-08 | 순천향대학교 산학협력단 | 다목적 드론 |
| KR20210010966A (ko) * | 2019-07-17 | 2021-01-29 | 김호영 | 다목적 운행체 |
| KR20210084750A (ko) * | 2019-12-27 | 2021-07-08 | 한국전력공사 | 대형 구조물 유지 보수 장치 |
| CN111661337A (zh) * | 2020-06-22 | 2020-09-15 | 安徽九洲农业科技有限公司 | 一种农业无人机挂载装置 |
| CN111661337B (zh) * | 2020-06-22 | 2021-08-06 | 安徽九洲农业科技有限公司 | 一种农业无人机挂载装置 |
| CN115535279A (zh) * | 2021-12-15 | 2022-12-30 | 聊城市茌平区润德勘察测绘有限公司 | 一种测绘地理信息用无人机勘测系统及其使用方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2017119546A1 (ko) | 2017-07-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20170083380A (ko) | 이동 장치 | |
| KR101767943B1 (ko) | 추력의 방향 설정이 가능한 멀티로터 타입의 무인 비행체 | |
| CA2544980C (en) | Rotary-wing vehicle system | |
| JP4899069B2 (ja) | 球形飛行機 | |
| US8292215B2 (en) | Helicopter with folding rotor arms | |
| KR20170135577A (ko) | 틸팅 및 가변 피치 시스템이 적용된 무인 비행체 | |
| JP6006452B1 (ja) | ヘリコプタのロータヘッド、マルチロータ型ヘリコプタ及びヘリコプタ | |
| JP3723820B2 (ja) | 同軸反転式ラジオコントロールヘリコプタ | |
| US20100044499A1 (en) | Six rotor helicopter | |
| JP2007521174A (ja) | 超小型飛行体 | |
| KR101853354B1 (ko) | 드론 | |
| KR20170122903A (ko) | 프로펠러 사이 간격을 조절할 수 있는 멀티콥터 | |
| EP2712661B1 (en) | Propulsion apparatus and method of use | |
| JP2024544824A (ja) | プロペラの軸の移動が可能なドローン | |
| KR102038321B1 (ko) | 드론용 틸팅 블레이드 어셈블리 | |
| JP2011195050A (ja) | 小型飛翔装置 | |
| KR101666777B1 (ko) | 회전익 구조체 및 비행 방법 | |
| KR20160010711A (ko) | 멀티콥터 | |
| JP3321586B2 (ja) | 産業用無人ヘリコプタの操舵装置 | |
| KR200336766Y1 (ko) | 날개짓 비행체 구동 메커니즘 | |
| KR102140155B1 (ko) | 가변 팁펜스 프로펠러가 구비되는 드론 | |
| JP2017190091A (ja) | トレイ型マルチコプター | |
| KR101807179B1 (ko) | X자 고정날개가 구비되는 드론 | |
| KR102107174B1 (ko) | 방향전환 구조를 개선한 드론 | |
| EP1863706A2 (en) | A craft having a rotatable fluid propulsion device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
Patent event code: PA01091R01D Comment text: Patent Application Patent event date: 20160108 |
|
| PG1501 | Laying open of application | ||
| N231 | Notification of change of applicant | ||
| PN2301 | Change of applicant |
Patent event date: 20190329 Comment text: Notification of Change of Applicant Patent event code: PN23011R01D |
|
| PC1203 | Withdrawal of no request for examination | ||
| WITN | Application deemed withdrawn, e.g. because no request for examination was filed or no examination fee was paid |