KR20170088681A - 단층 촬영 장치 및 그에 따른 단층 영상 복원 방법 - Google Patents
단층 촬영 장치 및 그에 따른 단층 영상 복원 방법 Download PDFInfo
- Publication number
- KR20170088681A KR20170088681A KR1020160008891A KR20160008891A KR20170088681A KR 20170088681 A KR20170088681 A KR 20170088681A KR 1020160008891 A KR1020160008891 A KR 1020160008891A KR 20160008891 A KR20160008891 A KR 20160008891A KR 20170088681 A KR20170088681 A KR 20170088681A
- Authority
- KR
- South Korea
- Prior art keywords
- motion
- data
- image
- psf
- tomographic
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images








Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/52—Devices using data or image processing specially adapted for radiation diagnosis
- A61B6/5258—Devices using data or image processing specially adapted for radiation diagnosis involving detection or reduction of artifacts or noise
- A61B6/5264—Devices using data or image processing specially adapted for radiation diagnosis involving detection or reduction of artifacts or noise due to motion
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/72—Signal processing specially adapted for physiological signals or for diagnostic purposes
- A61B5/7203—Signal processing specially adapted for physiological signals or for diagnostic purposes for noise prevention, reduction or removal
- A61B5/7207—Signal processing specially adapted for physiological signals or for diagnostic purposes for noise prevention, reduction or removal of noise induced by motion artifacts
- A61B5/721—Signal processing specially adapted for physiological signals or for diagnostic purposes for noise prevention, reduction or removal of noise induced by motion artifacts using a separate sensor to detect motion or using motion information derived from signals other than the physiological signal to be measured
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/02—Arrangements for diagnosis sequentially in different planes; Stereoscopic radiation diagnosis
- A61B6/03—Computed tomography [CT]
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/02—Arrangements for diagnosis sequentially in different planes; Stereoscopic radiation diagnosis
- A61B6/03—Computed tomography [CT]
- A61B6/032—Transmission computed tomography [CT]
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/02—Arrangements for diagnosis sequentially in different planes; Stereoscopic radiation diagnosis
- A61B6/03—Computed tomography [CT]
- A61B6/037—Emission tomography
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/52—Devices using data or image processing specially adapted for radiation diagnosis
- A61B6/5205—Devices using data or image processing specially adapted for radiation diagnosis involving processing of raw data to produce diagnostic data
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/52—Devices using data or image processing specially adapted for radiation diagnosis
- A61B6/5211—Devices using data or image processing specially adapted for radiation diagnosis involving processing of medical diagnostic data
- A61B6/5217—Devices using data or image processing specially adapted for radiation diagnosis involving processing of medical diagnostic data extracting a diagnostic or physiological parameter from medical diagnostic data
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/52—Devices using data or image processing specially adapted for radiation diagnosis
- A61B6/5258—Devices using data or image processing specially adapted for radiation diagnosis involving detection or reduction of artifacts or noise
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T12/00—Tomographic reconstruction from projections
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T12/00—Tomographic reconstruction from projections
- G06T12/10—Image preprocessing, e.g. calibration, positioning of sources or scatter correction
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T12/00—Tomographic reconstruction from projections
- G06T12/30—Image post-processing, e.g. metal artefact correction
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/0002—Inspection of images, e.g. flaw detection
- G06T7/0012—Biomedical image inspection
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/70—Determining position or orientation of objects or cameras
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/97—Determining parameters from multiple pictures
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/0059—Measuring for diagnostic purposes; Identification of persons using light, e.g. diagnosis by transillumination, diascopy, fluorescence
- A61B5/0062—Arrangements for scanning
- A61B5/0066—Optical coherence imaging
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2211/00—Image generation
- G06T2211/40—Computed tomography
- G06T2211/412—Dynamic
Landscapes
- Engineering & Computer Science (AREA)
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Medical Informatics (AREA)
- Physics & Mathematics (AREA)
- General Health & Medical Sciences (AREA)
- Surgery (AREA)
- Public Health (AREA)
- Biophysics (AREA)
- Veterinary Medicine (AREA)
- Animal Behavior & Ethology (AREA)
- Pathology (AREA)
- Molecular Biology (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Radiology & Medical Imaging (AREA)
- Optics & Photonics (AREA)
- High Energy & Nuclear Physics (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Theoretical Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Signal Processing (AREA)
- Pulmonology (AREA)
- Physiology (AREA)
- Artificial Intelligence (AREA)
- Psychiatry (AREA)
- Apparatus For Radiation Diagnosis (AREA)
- Quality & Reliability (AREA)
- Multimedia (AREA)
- Geometry (AREA)
- Computer Graphics (AREA)
Abstract
단층 영상 복원 방법 및 단층 촬영 장치가 개시된다.
대상체를 단층 촬영하여 복수개의 뷰에 대응되는 복수개의 로 데이터를 획득하고, 갠트리 내에 형성되는 시야면(FOV) 내의 복셀의 위치에 따라 변화하는 PSF에 기초하여 복수개의 로 데이터를 각각 디블러링하는 단계, 및 대상체의 움직임을 나타내는 모션 벡터에 기초하여, 디블러링된 복수개의 로 데이터로부터 대상체의 움직임이 보정된 최종 단층 영상을 복원하는 단계를 포함하는, 단층 영상 복원 방법이 개시된다.
대상체를 단층 촬영하여 복수개의 뷰에 대응되는 복수개의 로 데이터를 획득하고, 갠트리 내에 형성되는 시야면(FOV) 내의 복셀의 위치에 따라 변화하는 PSF에 기초하여 복수개의 로 데이터를 각각 디블러링하는 단계, 및 대상체의 움직임을 나타내는 모션 벡터에 기초하여, 디블러링된 복수개의 로 데이터로부터 대상체의 움직임이 보정된 최종 단층 영상을 복원하는 단계를 포함하는, 단층 영상 복원 방법이 개시된다.
Description
개시된 실시예들은 단층 촬영 장치 및 그에 따른 단층 영상 복원 방법에 관한 것이다. 보다 구체적으로, 단층 촬영한 의료 영상의 해상도를 향상시킬 수 있는 단층 촬영 장치 및 그에 따른 단층 영상 복원 방법에 관한 것이다.
의료 영상 장치는 대상체의 내부 구조를 영상으로 획득하기 위한 장비이다. 의료 영상 처리 장치는 비침습 검사 장치로서, 신체 내의 구조적 세부사항, 내부 조직 및 유체의 흐름 등을 촬영 및 처리하여 사용자에게 보여준다. 의사 등의 사용자는 의료 영상 처리 장치에서 출력되는 의료 영상을 이용하여 환자의 건강 상태 및 질병을 진단할 수 있다.
환자에게 엑스레이를 조사하여 대상체를 촬영하기 위한 장치로는 대표적으로 컴퓨터 단층 촬영(CT: Computed Tomography) 장치가 있다.
의료 영상 처리 장치 중 단층 촬영 장치인 컴퓨터 단층 촬영(CT) 장치는 대상체에 대한 단면 영상을 제공할 수 있고, 일반적인 엑스레이 장치에 비하여 대상체의 내부 구조(예컨대, 신장, 폐 등의 장기 등)가 겹치지 않게 표현할 수 있다는 장점이 있어서, 질병의 정밀한 진단을 위하여 널리 이용된다. 이하에서는 단층 촬영 장치에 의해서 획득된 의료 영상을 단층 영상이라 한다.
단층 영상을 획득하는데 있어서, 단층 촬영 장치는 대상체에 대한 단층 촬영을 수행하고, 로 데이터(raw data)를 획득한다. 그리고, 단층 촬영 장치는 획득한 로 데이터를 이용하여 단층 영상을 복원(reconstruction)하게 된다. 여기서, 로 데이터는 엑스레이를 대상체로 조사(projection)하여 획득한 프로젝션 데이터(projection data), 또는 프로젝션 데이터의 집합인 사이노그램(sinogram)이 될 수 있다.
단층 촬영 장치 또는 단층 촬영의 대상이 되는 대상체가 움직이거나 단층 촬영 장치의 성능 등으로 인하여, 단층 영상을 복원할 때 블러링 아티팩트(blurring artifact)가 발생할 수 있다. 예를 들어, 단층 촬영 장치는 동작 시 자체적인 흔들림을 가질 수 있으며, 이러한 흔들림으로 인하여 영상 내의 블러링 아티팩트가 발생할 수 있다.
블러링 아티팩트가 발생하면, 복원된 단층 영상에서 대상체의 최외곽 경계(edge)가 선명하지 않고 중첩적으로 표시될 수 있으며, 단층 영상 내에 대상체의 내부 경계가 블러링(blurring)되어 표시된다.
또한, CT 촬영의 대상이 되는 대상체가 움직이는 경우, 한주기 동안에도 대상체의 움직임이 발생하게 되며, 이러한 대상체의 움직임으로 인하여, CT 영상을 복원(reconstruction)하는데 있어서 움직임 아티팩트(motion artifact)가 발생하게 된다.
이러한 단층 영상 내의 블러링 아티팩트 및 움직임 아티팩트는, 단층 영상의 화질을 저하시키고, 사용자가 영상을 판독하여 질병을 진단할 때, 판독 및 진단의 정확성을 저하시킨다.
따라서, 단층 촬영에 있어서, 단층 영상의 블러링 아티팩트 및 움직임 아트팩트를 최소화하는 것이 중요하다.
개시된 실시예들은 단층 영상의 블러링 아티팩트 및 움직임 아티팩트를 감소시킬 수 있는 단층 촬영 장치 및 그에 따른 단층 영상 복원 방법의 제공을 목적으로 한다.
개시된 일 실시예에 따른 단층 영상 복원 방법은, 대상체를 단층 촬영하여 복수개의 뷰에 대응되는 복수개의 로 데이터를 획득하고, 갠트리 내에 형성되는 시야면 내의 위치에 따라 변화하는 PSF에 기초하여 복수개의 로 데이터를 각각 디블러링하는 단계, 대상체이 움직임을 나타내는 모션 벡터에 기초하여 디블러링된 복수개의 로 데이터로부터 대상체의 움직임이 보정된 최종 단층 영상을 복원하는 단계를 포함할 수 있다.
개시된 일 실시예에 따른 디블러링하는 단계는, 갠트리 내에 형성되는 시야면 내의 위치에 따라 변화하는 PSF에 기초하여, 로 데이터를 디컨볼루션하는 단계를 포함할 수 있다.
개시된 일 실시예에 따른 단층 영상 복원 방법은, 대상체를 단층 촬영하여 획득한 서로 다른 뷰에 대응되는 로 데이터들을 이용하여 부분 영상들을 획득하는 단계, 부분 영상들에 기초하여 대상체의 움직임을 측정하는 단계, 및 측정된 움직임을 모션 벡터로 나타내는 단계를 더 포함할 수 있다.
개시된 일 실시예에 따른 단층 영상 복원 방법은, 복수개의 로 데이터에 기초하여, 뷰에 대응되는 갠트리 내에 형성되는 시야면 내의 위치에 따라 변화하는 PSF를 추정하는 단계를 더 포함할 수 있다.
개시된 일 실시예에 따른 단층 영상 복원 방법은, 대상체를 단층 촬영하여 복수개의 뷰에 대응되는 복수개의 로 데이터를 획득하는 단계, 복수개의 뷰 각각에 대응되는 시점을 계산하고, 갠트리 내에 형성되는 시야면을 구성하는 모든 복셀들에 대하여, 각 시점에 대응되는 모션 벡터에 기초하여 복셀들의 위치를 보정하는 단계, 및 보정된 복셀들의 위치에 대응되는 PSF 각각에 기초하여 디블러링하는 단계를 포함할 수 있다.
개시된 일 실시예에 따른 디블러링하는 단계는, 뷰에 대응되는 각도 및 보정된 복셀의 위치에 기초하여, 복셀의 위치에 대응되는 PSF를 추정하는 단계를 더 포함할 수 있다.
개시된 일 실시예에 따른 디블러링하는 단계는, 보정된 복셀의 위치에 대응되는 프로젝션 좌표를 계산하는 단계, 및 보정된 복셀의 위치에 대응되는 PSF에 기초하여, 프로젝션 좌표에서 디컨볼루션을 수행하는 단계를 더 포함할 수 있다.
개시된 일 실시예에 따른 단층 영상 복원 방법은, 사전에 복수개의 뷰에 대응되는 시점에 대하여, 각 복셀에서의 움직임을 예측하고, 예측된 움직임을 각각의 모션 벡터로 나타내는 단계; 및 각각의 모션 벡터를 저장하는 단계를 더 포함할 수 있다.
개시된 일 실시예에 따른 단층 영상 복원 방법은, 디블러링된 데이터에 기초하여 최종 단층 영상을 복원하는 단계를 더 포함할 수 있다.
개시된 일 실시예에 따른 단층 촬영 장치는, 대상체를 단층 촬영하여 복수개의 뷰에 대응되는 복수개의 로 데이터를 획득하는 데이터 획득부, 및 갠트리 내에 형성되는 시야면 내의 위치에 따라 변화하는 PSF에 기초하여 복수개의 로 데이터를 각각 디블러링하고, 대상체의 움직임을 나타내는 모션 벡터에 기초하여 디블러링된 복수개의 로 데이터로부터 대상체의 움직임이 보정된 최종 단층 영상을 복원하는 영상 처리부를 포함할 수 있다.
개시된 일 실시예에 따른 영상 처리부는, 갠트리 내에 형성되는 시야면 내의 위치에 따라 변화하는 PSF에 기초하여, 로 데이터를 디컨볼루션 수행할 수 있다.
개시된 일 실시예에 따른 데이터 획득부는 대상체를 단층 촬영하여 획득한 서로 다른 뷰에 대응되는 로 데이터들을 이용하여 부분 영상들을 획득하고, 영상 처리부는 부분 영상들에 기초하여 대상체의 움직임을 측정하고, 측정된 움직임을 모션 벡터로 나타낼 수 있다.
개시된 일 실시예에 따른 영상 처리부는, 복수개의 로 데이터에 기초하여, 뷰에 대응되고 상기 갠트리 내에 형성되는 시야면 내의 위치에 따라 변화하는 PSF를 추정할 수 있다.
개시된 일 실시예에 따른 단층 촬영 장치는, 대상체를 단층 촬영하여 복수개의 뷰에 대응되는 복수개의 로 데이터를 획득하는 데이터 획득부, 및 복수개의 뷰 각각에 대응되는 시점을 계산하고, 갠트리 내에 형성되는 시야면을 구성하는 모든 복셀들에 대하여, 각 시점에 대응되는 모션 벡터에 기초하여 복셀들 각각의 위치를 보정하고, 보정된 복셀들의 위치에 대응되는 PSF 각각에 기초하여 디블러링하는 영상 처리부를 포함할 수 있다.
개시된 일 실시예에 따른 영상 처리부는, 뷰에 대응되는 각도 및 보정된 복셀의 위치에 기초하여, 복셀의 위치에 대응되는 PSF를 추정할 수 있다.
개시된 일 실시예에 따른 영상 처리부는, 보정된 복셀의 위치에 대응되는 프로젝션 좌표를 계산하고, 보정된 복셀의 위치에 대응되는 PSF에 기초하여 프로젝션 좌표에서 디컨볼루션을 수행할 수 있다.
개시된 일 실시예에 따른 단층 촬영 장치는 저장부를 더 포함하고, 영상 처리부는 사전에 복수개의 뷰 각각에 대응되는 시점에 대하여, 각 복셀에서의 움직임을 예측하고, 예측된 움직임을 각각의 모션 벡터로 나타내고, 저장부는 각각의 모션 벡터를 저장할 수 있다.
개시된 일 실시예에 따른 영상 처리부는, 디블러링된 데이터에 기초하여 최종 단층 영상을 복원할 수 있다.
도 1은 일반적인 CT 시스템의 개략도이다.
도 2는 개시된 실시예에 따른 CT 시스템의 구조를 나타내는 도면이다.
도 3은 통신부의 구성을 나타내는 도면이다.
도 4는 개시된 일 실시예에 따른 단층 영상 복원 방법을 나타내는 흐름도이다.
도 5는 개시된 일 실시예에 따른 부분 영상을 설명하기 위한 도면이다.
도 6은 개시된 다른 실시예에 따른 단층 영상 복원 방법을 나타내는 흐름도이다.
도 7은 개시된 일 실시예에 따른 단층 촬영 장치에서 복셀의 위치를 보정하는 과정을 설명하기 위한 도면이다.
도 8은 개시된 일 실시예에 따른 단층 영상 복원 방법을 나타내는 흐름도이다.
도 9a 및 도 9b는 개시된 실시예에 따른 단층 촬영 장치의 구성을 나타내는 블록도이다.
도 2는 개시된 실시예에 따른 CT 시스템의 구조를 나타내는 도면이다.
도 3은 통신부의 구성을 나타내는 도면이다.
도 4는 개시된 일 실시예에 따른 단층 영상 복원 방법을 나타내는 흐름도이다.
도 5는 개시된 일 실시예에 따른 부분 영상을 설명하기 위한 도면이다.
도 6은 개시된 다른 실시예에 따른 단층 영상 복원 방법을 나타내는 흐름도이다.
도 7은 개시된 일 실시예에 따른 단층 촬영 장치에서 복셀의 위치를 보정하는 과정을 설명하기 위한 도면이다.
도 8은 개시된 일 실시예에 따른 단층 영상 복원 방법을 나타내는 흐름도이다.
도 9a 및 도 9b는 개시된 실시예에 따른 단층 촬영 장치의 구성을 나타내는 블록도이다.
본 발명의 이점 및 특징, 그리고 그것들을 달성하는 방법은 첨부되는 도면과 함께 후술되어 있는 실시예들을 참조하면 명확해질 것이다. 그러나 본 발명은 이하에서 개시되는 실시예들에 한정되는 것이 아니라 서로 다른 다양한 형태로 구현될 수 있으며, 단지 본 실시예들은 본 발명의 개시가 완전하도록 하고, 본 발명이 속하는 기술 분야에서 통상의 지식을 가진 자에게 발명의 범주를 완전하게 알려주기 위해 제공되는 것이며, 본 발명은 청구항의 범주에 의해 정의될 뿐이다. 명세서 전체에 걸쳐, 동일 참조 부호는 동일 구성 요소를 지칭한다.
본 명세서에서 사용되는 용어에 대해 간략히 설명하고, 본 발명에 대해 구체적으로 설명하기로 한다.
본 발명에서 사용되는 용어는 본 발명에서의 기능을 고려하면서 가능한 현재 널리 사용되는 일반적인 용어들을 선택하였으나, 이는 당 분야에 종사하는 기술자의 의도 또는 판례, 새로운 기술의 출현 등에 따라 달라질 수 있다. 또한, 특정한 경우는 출원인이 임의로 선정한 용어도 있으며, 이 경우 해당되는 발명의 설명 부분에서 상세히 그 의미를 기재할 것이다. 따라서 본 발명에서 사용되는 용어는 단순한 용어의 명칭이 아닌, 그 용어가 가지는 의미와 본 발명의 전반에 걸친 내용을 토대로 정의되어야 한다.
명세서 전체에서 어떤 부분이 어떤 구성요소를 "포함"한다고 할 때, 이는 특별히 반대되는 기재가 없는 한 다른 구성요소를 제외하는 것이 아니라 다른 구성요소를 더 포함할 수 있음을 의미한다. 또한, 명세서에서 사용되는 "부"라는 용어는 소프트웨어, FPGA 또는 ASIC과 같은 하드웨어 구성요소를 의미하며, "부"는 어떤 역할들을 수행한다. 그렇지만 '부'는 소프트웨어 또는 하드웨어에 한정되는 의미는 아니다. '부'는 어드레싱할 수 있는 저장 매체에 있도록 구성될 수도 있고, 하나 또는 그 이상의 프로세서들을 재생시키도록 구성될 수도 있다. 따라서, 일 예로서 "부"는 소프트웨어 구성요소들, 객체지향 소프트웨어 구성요소들, 클래스 구성요소들 및 태스크 구성요소들과 같은 구성요소들과, 프로세스들, 함수들, 속성들, 프로시저들, 서브루틴들, 프로그램 코드의 세그먼트들, 드라이버들, 펌웨어, 마이크로 코드, 회로, 데이터, 데이터베이스, 데이터 구조들, 테이블들, 어레이들 및 변수들을 포함한다. 구성요소들과 "부"들 안에서 제공되는 기능은 더 작은 수의 구성요소들 및 "부"들로 결합되거나, 추가적인 구성요소들과 "부"들로 더 분리될 수 있다.
아래에서는, 첨부한 도면을 참고하여 개시된 실시예에 대하여 본 발명이 속하는 기술 분야에서 통상의 지식을 가진 자가 용이하게 실시할 수 있도록 상세히 설명한다. 그러나, 본 발명은 여러 가지 상이한 형태로 구현될 수 있으며, 여기에서 설명하는 실시예들에 한정되지 않는다. 그리고, 도면에서 본 발명을 명확하게 설명하기 위해서 설명과 관계없는 부분은 생략한다.
본 명세서에서 "영상"은 이산적인 영상 요소들(예를 들어, 2차원 영상에 있어서의 픽셀들 및 3차원 영상에 있어서의 복셀들)로 구성된 다차원(multi-dimensional) 데이터를 의미할 수 있다. 예를 들어, 영상은 CT 촬영 장치에 의해 획득된 대상체의 의료 영상 등을 포함할 수 있다.
본 명세서에서 "CT(Computed Tomography) 영상"이란 대상체에 대한 적어도 하나의 축을 중심으로 회전하며, 대상체를 촬영함으로써 획득된 복수개의 엑스레이 영상들의 합성 영상을 의미할 수 있다.
본 명세서에서 "대상체(object)"는 사람 또는 동물, 또는 사람 또는 동물의 일부 또는 전부일 수 있다. 예를 들어, 대상체는 간, 심장, 자궁, 뇌, 유방, 복부 등의 장기, 및 혈관 중 적어도 하나를 포함할 수 있다. 또한, "대상체"는 팬텀(phantom)일 수도 있다. 팬텀은 생물의 밀도와 실효 원자 번호에 아주 근사한 부피를 갖는 물질을 의미하는 것으로, 신체와 유사한 성질을 갖는 구형(sphere)의 팬텀을 포함할 수 있다.
본 명세서에서 "사용자"는 의료 전문가로서 의사, 간호사, 임상 병리사, 의료 영상 전문가 등이 될 수 있으며, 의료 장치를 수리하는 기술자가 될 수 있으나, 이에 한정되지 않는다.
CT 시스템은 대상체에 대하여 단면 영상을 제공할 수 있으므로, 일반적인 X-ray 촬영 기기에 비하여 대상체의 내부 구조(예컨대, 신장, 폐 등의 장기 등)가 겹치지 않게 표현할 수 있다는 장점이 있다.
구체적으로, 단층 촬영 시스템(100)은 CT(computed Tomography) 장치, OCT(Optical Coherenc Tomography), 또는 PET(positron emission tomography)-CT 장치 등과 같은 모든 단층 촬영 장치들을 포함할 수 있다.
이하에서는, 단층 촬영 시스템(100)으로 CT 시스템을 예로 들어 설명한다.
CT 시스템은, 예를 들어, 2mm 두께 이하의 영상 데이터를 초당 수백 회 획득하여 가공함으로써 대상체에 대하여 비교적 정확한 단면 영상을 제공할 수 있다. 종래에는 대상체의 가로 단면만으로 표현된다는 문제점이 있었지만, 다음과 같은 여러 가지 영상 재구성 기법의 등장에 의하여 극복되었다. 3차원 재구성 영상 기법들로는 다음과 같은 기법들이 있다.
- SSD(Shade surface display): 초기 3차원 영상 기법으로 일정 HU 값을 가지는 복셀들만 나타내도록 하는 기법.
- MIP(maximum intensity projection)/MinIP(minimum intensity projection): 영상을 구성하는 복셀 중에서 가장 높은 또는 낮은 HU 값을 가지는 것들만 나타내는 3D 기법.
- VR(volume rendering): 영상을 구성하는 복셀들을 관심 영역별로 색 및 투과도를 조절할 수 있는 기법.
- 가상내시경(Virtual endoscopy): VR 또는 SSD 기법으로 재구성한 3차원 영상에서 내시경적 관찰이 가능한 기법.
- MPR(multi planar reformation): 다른 단면 영상으로 재구성하는 영상 기법. 사용자가 원하는 방향으로의 자유 자재의 재구성이 가능하다.
- Editing: VR에서 관심 부위를 보다 쉽게 관찰하도록 주변 복셀들을 정리하는 여러 가지 기법.
- VOI(voxel of interest): 선택 영역만을 VR로 표현하는 기법.
개시된 실시예에 따른 컴퓨터 단층촬영(CT) 시스템(100)은 첨부된 도 3을 참조하여 설명될 수 있다. 개시된 실시예에 따른 CT 시스템(100)은 다양한 형태의 장치들을 포함할 수 있다.
도 1은 CT 시스템(100)의 개략도이다.
도 1을 참조하면, CT 시스템(100)은 갠트리(102), 테이블(105), X-ray 생성부(106) 및 X-ray 검출부(108)를 포함할 수 있다.
갠트리(102)는 X-ray 생성부(106) 및 X-ray 검출부(108)를 포함할 수 있다.
대상체(10)는 테이블(105) 상에 위치될 수 있다.
테이블(105)은 CT 촬영 과정에서 소정의 방향(예컨대, 상, 하, 좌, 우 중 적어도 한 방향)으로 이동할 수 있다. 또한, 테이블(105)은 소정의 방향으로 소정의 각도만큼 기울어질 수 있거나(tilting) 또는 회전(rotating)될 수 있다.
또한, 갠트리(102)도 소정의 방향으로 소정의 각도만큼 기울어질 수 있다.
도 2는 개시된 실시예에 따른 CT 시스템(100)의 구조를 나타낸 도면이다.
개시된 실시예에 따른 CT 시스템(100)은 갠트리(102), 테이블(105), 제어부(118), 저장부(124), 영상 처리부(126), 입력부(128), 디스플레이부(130), 통신부(132)를 포함할 수 있다.
전술한 바와 같이, 대상체(10)는 테이블(105) 상에 위치할 수 있다. 개시된 실시예에 따른 테이블(105)은 소정의 방향(예컨대, 상, 하, 좌, 우 중 적어도 한 방향)으로 이동 가능하고, 제어부(118)에 의하여 움직임이 제어될 수 있다.
개시된 실시예에 따른 갠트리(102)는 회전 프레임(104), X-ray 생성부(106), X-ray 검출부(108), 회전 구동부(110), 데이터 획득 회로(116), 데이터 송신부(120)을 포함할 수 있다.
개시된 실시예에 따른 갠트리(102)는 소정의 회전축(RA; Rotation Axis)에 기초하여 회전 가능한 고리 형태의 회전 프레임(104)을 포함할 수 있다. 또한, 회전 프레임(104)는 디스크의 형태일 수도 있다.
회전 프레임(104)은 소정의 시야 범위(FOV; Field Of View)를 갖도록 각각 대향하여 배치된 X-ray 생성부(106) 및 X-ray 검출부(108)를 포함할 수 있다. 또한, 회전 프레임(104)은 산란 방지 그리드(anti-scatter grid, 114)를 포함할 수 있다. 산란 방지 그리드(114)는 X-ray 생성부(106)와 X-ray 검출부(108)의 사이에서 위치할 수 있다.
의료용 영상 시스템에 있어서, 검출기(또는 감광성 필름)에 도달하는 X-선 방사선에는, 유용한 영상을 형성하는 감쇠된 주 방사선(attenuated primary radiation) 뿐만 아니라 영상의 품질을 떨어뜨리는 산란 방사선(scattered radiation) 등이 포함되어 있다. 주 방사선은 대부분 투과시키고 산란 방사선은 감쇠시키기 위해, 환자와 검출기(또는 감광성 필름)와의 사이에 산란 방지 그리드를 위치시킬 수 있다.
예를 들어, 산란 방지 그리드는, 납 박편의 스트립(strips of lead foil)과, 중공이 없는 폴리머 물질(solid polymer material)이나 중공이 없는 폴리머(solid polymer) 및 섬유 합성 물질(fiber composite material) 등의 공간 충전 물질(interspace material)을 교대로 적층한 형태로 구성될 수 있다. 그러나, 산란 방지 그리드의 형태는 반드시 이에 제한되는 것은 아니다.
회전 프레임(104)은 회전 구동부(110)로부터 구동 신호를 수신하고, X-ray 생성부(106)와 X-ray 검출부(108)를 소정의 회전 속도로 회전시킬 수 있다. 회전 프레임(104)은 슬립 링(미도시)을 통하여 접촉 방식으로 회전 구동부(110)로부터 구동 신호, 파워를 수신할 수 있다. 또한, 회전 프레임(104)은 무선 통신을 통하여 회전 구동부(110)로부터 구동 신호, 파워를 수신할 수 있다.
X-ray 생성부(106)는 파워 분배부(PDU; Power Distribution Unit, 미도시)에서 슬립 링(미도시)을 거쳐 고전압 생성부(미도시)를 통하여 전압, 전류를 인가 받아 X선을 생성하여 방출할 수 있다. 고전압 생성부가 소정의 전압(이하에서 튜브 전압으로 지칭함)을 인가할 때, X-ray 생성부(106)는 이러한 소정의 튜브 전압에 상응하게 복수의 에너지 스펙트럼을 갖는 X-ray들을 생성할 수 있다.
X-ray 생성부(106)에 의하여 생성되는 X-ray는, 콜리메이터(collimator, 112)에 의하여 소정의 형태로 방출될 수 있다.
X-ray 검출부(108)는 X-ray 생성부(106)와 마주하여 위치할 수 있다. X-ray 검출부(108)는 복수의 X-ray 검출 소자들을 포함할 수 있다. 단일 엑스선 검출 소자는 단일 채널을 형성할 수 있지만, 반드시 이에 제한되는 것은 아니다.
X-ray 검출부(108)는 X-ray 생성부(106)로부터 생성되고 대상체(10)를 통하여 전송된 X선을 감지하고, 감지된 X선의 강도에 상응하게 전기 신호를 생성할 수 있다.
X-ray 검출부(108)는 방사선을 광으로 전환하여 검출하는 간접 방식과 방사선을 직접 전하로 변환하여 검출하는 직접 방식 검출기를 포함할 수 있다. 간접방식의 X-ray 검출부는 Scintillator를 사용할 수 있다. 또한, 직접 방식의 X-ray 검출부는 photon counting detector를 사용할 수 있다. 데이터 획득 회로(DAS; Data Acquisitino System)(116)는 X-ray 검출부(108)와 연결될 수 있다. X-ray 검출부(108)에 의하여 생성된 전기 신호는 DAS(116)에서 수집될 수 있다. X-ray 검출부(108)에 의하여 생성된 전기 신호는 유선 또는 무선으로 DAS(116)에서 수집될 수 있다. 또한, X-ray 검출부(108)에 의하여 생성된 전기 신호는 증폭기(미도시)를 거쳐 아날로그/디지털 컨버터(미도시)로 제공될 수 있다.
슬라이스 두께(slice thickness)나 슬라이스 개수에 따라 X-ray 검출부(108)로부터 수집된 일부 데이터만이 영상 처리부(126)에 제공될 수 있고, 또는 영상 처리부(126)에서 일부 데이터만을 선택할 수 있다.
이러한 디지털 신호는 데이터 송신부(120)를 통하여 영상 처리부(126)로 제공될 수 있다. 이러한 디지털 신호는 데이터 송신부(120)를 통하여 유선 또는 무선으로 영상 처리부(126)로 송신될 수 있다.
개시된 실시예에 따른 제어부(118)는 CT 시스템(100)의 각각의 모듈의 동작을 제어할 수 있다. 예를 들어, 제어부(118)는 테이블(105), 회전 구동부(110), 콜리메이터(112), DAS(116), 저장부(124), 영상 처리부(126), 입력부(128), 디스플레이부(130), 통신부(132) 등의 동작들을 제어할 수 있다.
영상 처리부(126)는 DAS(116)로부터 획득된 데이터(예컨대, 가공 전인 로 데이터(raw data))를 데이터 송신부(120)을 통하여 수신하여, 전처리(pre-processing)하는 과정을 수행할 수 있다.
전처리는, 예를 들면, 채널들 사이의 감도 불균일 정정 프로세스, 신호 세기의 급격한 감소 또는 금속 같은 X선 흡수재로 인한 신호의 유실 정정 프로세스 등을 포함할 수 있다.
영상 처리부(126)의 출력 데이터는 로 데이터(raw data) 또는 프로젝션(projection) 데이터로 지칭될 수 있다. 이러한 프로젝션 데이터는, 데이터 획득시의 촬영 조건(예컨대, 튜브 전압, 촬영 각도 등)등과 함께 저장부(124)에 저장될 수 있다.
프로젝션 데이터는 대상체를 통과한 X선의 세기에 상응하는 데이터 값의 집합일 수 있다. 설명의 편의를 위해, 모든 채널들에 대하여 동일한 촬영 각도로 동시에 획득된 프로젝션 데이터의 집합을 프로젝션 데이터 세트로 지칭한다.
저장부(124)는 플래시 메모리 타입(flash memory type), 하드디스크 타입(hard disk type), 멀티미디어 카드 마이크로 타입(multimedia card micro type), 카드 타입의 메모리(SD, XD 메모리 등), 램(RAM; Random Access Memory) SRAM(Static Random Access Memory), 롬(ROM; Read-Only Memory), EEPROM(Electrically Erasable Programmable Read-Only Memory), PROM(Programmable Read-Only Memory) 자기 메모리, 자기 디스크, 광디스크 중 적어도 하나의 타입의 저장매체를 포함할 수 있다.
또한, 영상 처리부(126)는, 획득된 프로젝션 데이터 세트를 이용하여 대상체에 대한 단면 영상을 재구성할 수 있다. 이러한 단면 영상은 3차원 영상일 수 있다. 다시 말해서, 영상 처리부(126)는 획득된 프로젝션 데이터 세트에 기초하여 콘 빔 재구성(cone beam reconstruction) 방법 등을 이용하여 대상체에 대한 3차원 영상을 생성할 수 있다.
입력부(128)를 통하여 X선 단층 촬영 조건, 영상 처리 조건 등에 대한 외부 입력이 수신될 수 있다. 예를 들면, X선 단층 촬영 조건은, 복수의 튜브 전압, 복수의 X선들의 에너지 값 설정, 촬영 프로토콜 선택, 영상재구성 방법 선택, FOV 영역 설정, 슬라이스 개수, 슬라이스 두께(slice thickness), 영상 후처리 파라미터 설정 등을 포함할 수 있다. 또한 영상 처리 조건은 영상의 해상도, 영상에 대한 감쇠 계수 설정, 영상의 조합 비율 설정 등을 포함할 수 있다.
입력부(128)는 외부로부터 소정의 입력을 인가 받기 위한 디바이스 등을 포함할 수 있다. 예컨대, 입력부(128)는 마이크로폰, 키보드, 마우스, 조이스틱, 터치 패드, 터치팬, 음성, 제스처 인식장치 등을 포함할 수 있다.
디스플레이부(130)는 영상 처리부(126)에 의해 재구성된 X선 촬영 영상을 디스플레이할 수 있다.
전술한 엘리먼트들 사이의 데이터, 파워 등의 송수신은 유선, 무선 및 광통신 중 적어도 하나를 이용하여 수행될 수 있다.
통신부(132)는 서버(134) 등을 통하여 외부 디바이스, 외부 의료 장치 등과의 통신을 수행할 수 있다. 이와 관련하여서는, 도 3을 참조하여 후술한다.
도 3은 통신부의 구성을 도시하는 도면이다.
통신부(132)는, 유선 또는 무선으로 네트워크(301)와 연결되어 외부 서버(134), 의료 장치(136) 또는 휴대용 장치(138) 와의 통신을 수행할 수 있다. 통신부(132)는, 의료 영상 정보 시스템(PACS, Picture Archiving and Communication System)을 통해 연결된 병원 서버나 병원 내의 다른 의료 장치와 데이터를 주고 받을 수 있다.
또한, 통신부(132)는 의료용 디지털 영상 및 통신(DICOM, Digital Imaging and Communications in Medicine) 표준에 따라 휴대용 장치 (138) 등과 데이터 통신을 수행할 수 있다.
통신부(132)는 네트워크(301)를 통해 대상체의 진단과 관련된 데이터를 송수신할 수 있다. 또한 통신부(132)는 MRI 장치, X-ray 장치 등 의료 장치(136)에서 획득된 의료 영상 등을 송수신할 수 있다.
나아가, 통신부(132)는 서버(134)로부터 환자의 진단 이력이나 치료 일정 등을 수신하여 환자의 임상적 진단 등에 활용할 수도 있다. 또한, 통신부(132)는 병원 내의 서버(134)나 의료 장치(136)뿐만 아니라, 사용자나 환자의 휴대용 장치(138) 등과 데이터 통신을 수행할 수도 있다.
또한, 장비의 이상 유무 및 품질 관리 현황 정보를 네트워크를 통해 시스템 관리자나 서비스 담당자에게 송신하고 그에 대한 피드백(feedback)을 수신할 수 있다.
모든 영상 장치는 공간 해상도(spatial resolution)를 가진다. 공간 해상도는, 영상 장치를 구동시켜 공간 상의 대상체를 촬영할 때, 촬영된 영상의 정밀도를 의미한다. 영상 장치로부터 획득된 영상은, 장치의 특성으로 인하여, 촬영 시점에서의 대상체의 상태를 블러링(blurring)없이 완벽하게 나타낼 수 없다. 예를 들어, 영상 장치가 구동되는 과정에서 발생하는 영상 장치 자체의 흔들림으로 인하여, 촬영된 영상 자체에도 흔들림이 나타날 수 있다. 또한, 단층 촬영의 대상이 되는 대상체가 움직이는 경우, 대상체의 움직임으로 인하여 영상에 블러링이 발생할 수 있다.
공간 해상도는 이미징된 영상 내에서 발생한 블러링의 정도에 따라서 결정된다. 예를 들어, 높은 공간 해상도를 가지는 영상 장치는, 낮은 공간 해상도를 가지는 영상 장치에 비하여, 영상 내에서 블러링의 정도가 적다.
단층 촬영 장치도 공간 해상도를 가진다. 그리고, 공간 해상도는, 단층 촬영 장치 자체의 성능 및 대상체의 움직임에 의해 영향을 받을 수 있다. 예를 들어, 단층 촬영 장치 자체의 성능의 제한으로 인해 발생하는 블러링 아티팩트(blurring artifact) 및 대상체의 움직임에 따라 발생하는 움직임 아티팩트(motion artifact)가 발생하게 된다. 이러한 단층 영상 내의 블러링 아티팩트 및 움직임 아티팩트는 단층 영상의 화질을 저하시킨다. 이로 인해, 의사 등의 사용자가 영상을 판독하여 질병을 진단하는데 있어서, 판독 및 진단의 정확성을 저하시킨다. 예를 들어, 영상에서 칼슘 영역을 나타내는 부분에 블러링 아티팩트가 발생한 경우, 실제로 막히지 않은 혈관이 막혀 있는 것처럼 보일 수 있다. 따라서, 이것은 혈관 질환의 진단 정확도를 낮출 수 있다.
블러링 아티팩트는, PSF(Point Spread Function)를 추정하고, 추정된 PSF에 기초하여 영상을 디블러링(de-blurring) 함으로써 개선될 수 있다. 여기서, PSF 는 단층 촬영 장치에 따라서 달라지게 된다. 구체적으로, PSF 는 단층 촬영 장치의 제품 사양 및/또는 성능 등에 따라서 달라질 수 있다. PSF는 복잡한 형태를 가지며, 갠트리 내에 형성되는 시야면(FOV. Field Of View)의 위치 및 X선 생성을 위한 관전류(tube current measured in milliamperes)에 따라 달라질 수 있다. 여기서, 블러링 아티팩트를 보정하는 것을 디블러링(de-blurring), 또는 디블루밍(de-blooming)이라고 칭할 수 있다. 이하에서는, 설명의 편의를 위하여, 블러링 아티팩트를 보정하는 것을 디블러링으로 통일하여 칭하기로 한다.
또한, 움직임 아티팩트는, 한주기에 해당하는 시간 또는 각도를 최소화하여 로 데이터를 획득함으로써 줄일 수 있다. 여기서, '한주기'는, 하나의 단층 영상을 복원하는데 필요한 로 데이터를 획득하기 위해서, X-ray 생성부(106)가 회전하는 시간 또는 각도(또는 위상)을 의미한다.
X-ray 생성부(106)가 반바퀴 이상 한바퀴 미만을 회전하여 획득된 로 데이터를 이용하여 하나의 단층 영상을 복원하는 것은 절반 복원(half reconstruction) 방식이라 하고, X-ray 생성부(106)가 한바퀴 회전하여 획득된 로 데이터를 이용하여 하나의 단층 영상을 복원하는 것은 전체 복원(full reconstruction) 방식이라 한다. 절반 복원 방식은 전체 복원 방식에 비하여, X-ray 생성부(106)가 회전하는 각도 구간이 작으므로, 절반 복원 방식으로 복원된 단층 영상은 전체 복원 방식에 의해 획득된 단층 영상에 비하여 움직임 아티팩트가 감소할 수 있다.
도 4는 개시된 일 실시예에 따른 단층 영상 복원 방법을 나타내는 흐름도이다.
S410 단계에서, 단층 촬영 장치(100)는, 대상체를 단층 촬영하여 복수개의 뷰(view)에 대응되는 복수개의 로 데이터를 획득한다. 그리고, 단층 촬영 장치(100)는, 갠트리 내에 형성되는 시야면(FOV) 내의 위치에 따라 변화하는 PSF에 기초하여, 복수개의 로 데이터를 각각 디블러링한다.
이때 대상체는, 소정의 장기를 포함할 수 있다. 구체적으로, 대상체는 심장, 복부, 자궁, 뇌, 유방 및 간 중 적어도 하나를 포함할 수 있다. 예를 들어, 대상체는 표면(surface)에 의해 표현되는 심장을 포함할 수 있다. 여기서, 심장은 소정의 영역 내 서로 다른 밝기 값을 가지는 적어도 하나의 조직을 포함할 수 있다.
소정의 위치에서 X-ray 생성부(106)가 대상체로 엑스레이를 방출할 때, X-ray 생성부(106)가 대상체를 바라보는 시점 또는 방향을 뷰(view)라고 한다. 그리고, 로 데이터(raw data)는 방사선을 대상체로 조사하여 획득된 프로젝션 데이터(projection data), 또는 프로젝션 데이터의 집합인 사이노그램(sinogram)이 될 수 있다. 또한, 로 데이터(raw data)는 사이노그램을 여과 역투영(filtered backprojection)하여 생성된 영상이 될 수도 있다. 프로젝션 데이터는 하나의 뷰에 대응하여 획득한 로 데이터이며, 사이노그램은 복수개의 프로젝션 데이터를 순차적으로 나열하여 획득한 로 데이터를 뜻한다.
그리고, 단층 촬영 장치(100)는, 시야면 내의 위치에 따라 변화하는 PSF에 기초하여, 로 데이터를 디컨볼루션 수행할 수 있다.
PSF(Point Spread Function)는, 갠트리 내에 형성되는 시야면 내의 위치에 따라 달라질 수 있다. 따라서, 시야면 내의 모든 위치에서 동일한 PSF에 기초하여 로 데이터를 디블러링하게 되면, 일부 위치에서는 정확하지 않은 PSF가 적용될 수 있다. 이에 따라, 단층 촬영 장치(100)는, 갠트리 내에 형성되는 시야면 내의 위치에 따라 변화하는 PSF에 기초하여, 로 데이터를 디블러링함으로써, 각 위치에 대응되는 정확한 PSF를 적용할 수 있다.
이때, 각 위치에 따른 PSF는, 가우시안 함수(Gaussian function)의 형태로 추정될 수 있으나, 이에 한정되지 않는다. 또한, 실시예에 따라, 단층 촬영 장치(100)는, 각 위치에 따른 PSF를 사전에 미리 추정하여 저장하고, 실제 대상체를 촬영할 때 저장된 PSF에 기초하여 디블러링할 수 있다. 또한, 단층 촬영 장치(100)는, 갠트리 내에 형성되는 시야면 내의 위치에 따라 변화하는 PSF를 외부 장치로부터 불러올 수 있다.
또한, 단층 촬영 장치(100)는, 대상체의 움직임을 나타내는 모션 벡터(motion vector)에 기초하여, 디블러링된 복수개의 로 데이터로부터 대상체의 움직임이 보정된 최종 단층 영상을 복원한다.
영상을 복원하는데 필요한 로 데이터를 획득하기 위해 갠트리가 회전하는데 걸리는 시간이 길수록, 움직임 아티팩트가 크게 나타날 수 있다. 이에 따라, 단층 촬영 장치(100)는, 서로 다른 180도 미만의 각도 구간에 대하여 단층 촬영하여 획득한 복수의 부분 영상(partial image)에 기초하여, 대상체의 움직임을 나타내는 모션 벡터를 계산할 수 있다. 부분 영상에 대해서는, 도 5를 참조하여 후술하기로 한다.
단층 촬영 장치(100)는, 모션 벡터를 사전에 계산하고, 대상체를 촬영하기 전에 미리 저장할 수 있다. 그러면, 단층 촬영 장치(100)는, 저장된 모션 벡터에 기초하여, 대상체의 움직임을 보정할 수 있다.
도 5는 개시된 일 실시예에 따른 부분 영상을 설명하기 위한 도면이다.
전술한 바와 같이, 단층 촬영 장치(100)는, 서로 다른 180도 미만의 각도 구간(510, 520)에 대하여 단층 촬영하여 획득한 복수의 부분 영상(partial image)에 기초하여, 대상체의 움직임을 나타내는 모션 벡터를 계산할 수 있다.
예를 들어, 단층 촬영 장치(100)는, 각각 180도 미만의 값을 갖는 제1 각도 구간(510) 및 제2 각도 구간(520)에 대하여 단층 촬영하여 각각의 로 데이터를 획득하고, 획득된 로 데이터를 이용하여 제1 영상 및 제2 영상을 획득할 수 있다. 이때, 제1 각도 구간 및 제2 각도 구간은 한주기 각도 구간 내에 포함되는 각도 구간으로, 서로 마주보는 켤레각(conjugate angle)의 관계를 가질 수 있다.
제1 영상 및 제2 영상은 부분 각도 복원(PAR: partial angle reconstruction)에 따라서 복원되는 영상이 될 수 있다. 이때, 제1 영상 및 제2 영상은 180도 미만의 각도 구간에서 획득된 로 데이터를 이용하여 복원된 영상이므로, 대상체를 전체적으로 나타내는 완전한 영상(complete image)가 아니라, 대상체를 부분적으로 나타내는 불완전한 영상(incomplete image)을 의미할 수 있다. 제1 영상 및 제2 영상과 같이 대상체를 부분적으로 나타내는 불완전한 영상(incomplete image)을 ‘부분 영상(partial image)’ 또는 ‘부분 각도 영상(partial angle image)’라 칭할 수 있다.
또한, 제1 각도 구간 및 제2 각도 구간이 켤레각의 관계에 있으면, 제1 각도 구간 및 제2 각도 구간에서의 뷰가 동일하므로, 제1 영상과 제2 영상은 대상체의 동일한 부위의 경계를 표시한다. 따라서, 단층 촬영 장치(100)는, 제1 영상과 제2 영상을 비교함으로써, 제1 영상과 제2 영상에 포함되는 대상체의 동일 부위의 표면들 사이의 차이를 알 수 있고, 대상체의 움직임 정도를 파악할 수 있다. 이에 따라, 단층 촬영 장치(100)는, 제1 영상 및 제2 영상에 기초하여, 대상체의 움직임을 나타내는 모션 벡터를 계산할 수 있다. 그리고, 모션 벡터는, 대상체의 움직임으로 인해 발생하는, 제1 영상에 포함되는 소정 대상체와 제2 영상에 포함되는 소정 대상체 사이의 형태, 크기, 및 위치 중 적어도 하나의 차이를 나타낼 수 있다.
도 6은 개시된 다른 실시예에 따른 단층 영상 복원 방법을 나타내는 흐름도이다.
S610 단계에서, 단층 촬영 장치(100)는, 대상체를 단층 촬영하여 복수개의 뷰에 대응되는 복수개의 로 데이터를 획득한다.
S620 단계에서, 단층 촬영 장치(100)는, 복수개의 뷰 각각에 대응되는 시점을 계산하고, 갠트리 내에 형성되는 시야면을 구성하는 모든 복셀들에 대하여, 각 시점에 대응되는 모션 벡터에 기초하여 복셀들의 위치를 보정한다.
대상체의 움직임은 시간이 흐름에 따라 다르게 나타나기 때문에, 대상체의 움직임을 나타내는 모션 벡터 또한 시간에 따라 변화한다. 이에 따라, 단층 촬영 장치(100)는, 대상체의 움직임을 보정할 때, 각각의 뷰에 대응되는 시점을 계산하고, 계산된 시점에 대응되는 모션 벡터를 적용하여 대상체의 움직임을 보정할 수 있다.
모션 벡터에 대해서는, 이하에서 도 7을 참조하여 후술하기로 한다.
S630 단계에서, 단층 촬영 장치(100)는, 보정된 복셀들의 위치에 대응되는 PSF에 기초하여, 디블러링할 수 있다. 보정된 복셀들의 위치는, 특정 시점에서의 대상체의 움직임이 보정된 복셀들의 위치일 수 있다. 따라서, 단층 촬영 장치(100)는, 움직임이 보정된 복셀의 위치에 대응되는 PSF를 적용함으로써, 정확한 PSF에 기초하여 디블러링할 수 있다.
도 7은 개시된 실시예에 따른 단층 촬영 장치에서 모션 벡터에 기초하여 복셀들의 위치를 보정하는 과정을 설명하기 위한 도면이다.
예를 들어, 도 7을 참조하면, 촬영을 시작한 시점에 대상체는 A에 위치할 수 있다. 그러나, 시간이 흐름에 따라 대상체가 움직일 수 있고, 특정 시점 t1일 때, 대상체의 실제 위치는 A'일 수 있다. 또한, 특정 시점 t2일 때, 대상체의 실제 위치는 A"일 수 있다. 이때, 대상체가 실제 위치하는 A' 또는 A"이 아닌 A에 대응되는 PSF 에 기초하여 디블러링할 경우, 정확하지 않은 PSF가 적용될 수 있고, 디블러링이 효과적으로 수행되지 않을 수 있다. 따라서, 디블러링을 효과적으로 수행하기 위해서는, 시간의 흐름에 따른 대상체의 움직임을 예측하고, 예측된 움직임을 고려하여 특정 시점에서의 대상체의 실제 위치를 보정하는 과정이 필요할 수 있다.
예를 들어, 단층 촬영 장치(100)는 도 7에 도시된 바와 같이, A에서 A'으로의 위치 변화를 나타내는 모션 벡터, A에서 A"으로의 위치 변화를 나타내는 모션 벡터에 기초하여, 위치를 보정할 수 있다. 이때, 단층 촬영 장치(100)는, 시간에 따라 변화하는 모션 벡터를 사전에 미리 계산하여 저장할 수 있다. 이에 따라, 단층 촬영 장치(100)는 단층 영상을 복원하는데 소요되는 시간을 줄일 수 있다. 그리고, 단층 촬영 장치(100)는, 보정된 위치에 대응되는 PSF를 적용하여 디블러링함으로써, 효과적으로 디블러링을 수행하고, 단층 영상의 해상도를 높일 수 있다.
도 8은 개시된 일 실시예에 따른 단층 영상 복원 방법을 나타내는 흐름도이다.
단층 촬영 장치(100)는, 대상체를 단층 촬영하여 복수개의 뷰에 대응되는 복수개의 로 데이터(810)를 획득할 수 있다. 이때, 단층 촬영 장치(100) 자체의 성능의 제한으로 블러링 아티팩트(820)가 발생할 수 있다. 블러링 아티팩트(820)는, 사용자가 단층 영상을 판독하여 질병을 진단하는데 있어서, 판독 및 진단의 정확성을 저하시킬 수 있다.
단층 촬영 장치(100)는, PSF(830)를 추정하고, 추정된 PSF(830)에 기초하여 로 데이터(810)를 디블러링함으로써 개선될 수 있다. 그리고, PSF(830)는, 갠트리 내에 형성되는 시야면 내의 위치에 따라 달라질 수 있다. 이에 따라, 단층 촬영 장치(100)는, 갠트리 내에 형성되는 시야면 내의 위치에 따라 변화하는 PSF(830)에 기초하여, 복수개의 로 데이터를 각각 디블러링함으로써, 각 위치에 대응되는 정확한 PSF를 적용할 수 있다.
또한, 단층 촬영 장치(100)는, 모션 벡터에 기초하여, 대상체의 움직임에 따라 발생하는 움직임 아티팩트를 개선할 수 있다. 대상체의 움직임은 시간이 흐름에 따라 다르게 나타나기 때문에, 대상체의 움직임을 나타내는 모션 벡터 또한 시간에 따라 다르게 변화한다. 이에 따라, 단층 촬영 장치(100)는, 각 시점에 대응되는 모션 벡터를 추정(840)하고, 계산된 시점에 대응되는 모션 벡터(850)를 적용하여 대상체의 움직임이 보정된 영상을 복원(860)할 수 있다.
또한, 실시예에 따라, 단층 촬영 장치(100)는, 복수개의 뷰에 대응되는 복수개의 로 데이터(810)로부터, 복수개의 뷰 각각에 대응되는 시점을 계산할 수 있다. 그리고, 단층 촬영 장치(100)는, 갠트리 내에 형성되는 시야면을 구성하는 모든 복셀들에 대하여, 각 시점에 대응되는 모션 벡터에 기초하여 복셀들의 위치를 보정할 수 있다. 그리고, 단층 촬영 장치(100)는, 보정된 복셀들의 위치에 대응되는 PSF(830)에 기초하여, 디블러링할 수 있다.
이에 따라, 단층 촬영 장치(100)는, 블러링 아티팩트 및 모션 아티팩트가 개선된 단층 영상을 복원(870)할 수 있다.
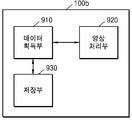
도 9a 및 도 9b는 개시된 일 실시예에 따른 단층 촬영 장치의 구성을 나타내는 블록도이다.
도 9a를 참조하면, 단층 촬영 장치(100a)는 데이터 획득부(910), 및 영상 처리부(920)를 포함한다.
단층 촬영 장치(100a)는 도 1 및 도 2에서 설명한 CT 시스템(100) 내에 포함될 수 있다. 또한, 단층 촬영 장치(100a)는 도 3에서 설명한 의료 장치(136) 또는 휴대용 장치(138) 내에 포함되어, CT 시스템(100)과 연결되어 동작할 수 도 있다. 구체적으로, 단층 촬영 장치(100a)는 대상체를 투과한 광선을 이용하여 획득된 데이터를 이용하여 영상을 복원하는 모든 의료 영상 장치가 될 수 있다. 즉, 단층 촬영 장치(100a)는 대상체를 투과한 광선을 이용하여 획득된 프로젝션 데이터(projection data)를 이용하여 단층 영상을 복원하는 모든 의료 영상 장치가 될 수 있다. 구체적으로, 단층 촬영 장치(100a)는 CT(computed Tomography) 장치, OCT(Optical Coherenc Tomography), 또는 PET(positron emission tomography)-CT 장치 등이 될 수 있다. 따라서, 본 발명의 실시예에 따른 단층 촬영 장치(100a)에서 획득되는 단층 영상은 CT 영상, OCT 영상, PET 영상 등이 될 수 있다. 이하에서 참조된 도면에서는 단층 영상으로 CT 영상을 예로 들어 첨부하였다. 또한, 단층 촬영 장치(100a)가 도 1 또는 도 2에서 설명한 CT 시스템(100)에 포함되는 경우, 도 3에 도시된 데이터 획득부 및 영상 처리부는 각각 도 2의 갠트리(102) 및 영상 처리부(126)에 포함될 수 있다. 따라서, 단층 촬영 장치(100a)에 있어서, 도 1 및 도 2에서와 중복되는 설명은 생략한다.
데이터 획득부(910)는, 대상체를 단층 촬영하여 복수개의 뷰에 대응되는 복수개의 프로젝션 데이터를 획득한다.
영상 처리부(920)는, 갠트리 내에 형성되는 시야면(FOV, Field of View) 내의 위치에 따라 변화하는 PSF에 기초하여, 데이터 획득부(910)로부터 획득한 로 데이터를 각각 디블러링한다. 구체적으로, 영상 처리부(920)는, 시야면 내의 위치에 따라 변화하는 PSF에 기초하여, 데이터 획득부(910)로부터 획득한 로 데이터를 디컨볼루션 수행할 수 있다.
전술한 바와 같이, PSF(Point Spread Function)는, 갠트리 내에 형성되는 시야면 내의 위치에 따라 달라질 수 있다. 따라서, 시야면 내의 모든 위치에서 동일한 PSF에 기초하여 로 데이터를 디블러링하게 되면, 일부 위치에서는 정확하지 않은 PSF가 적용될 수 있다. 이에 따라, 영상 처리부(920)는, 갠트리 내에 형성되는 시야면 내의 위치에 따라 변화하는 PSF에 기초하여, 로 데이터를 디블러링함으로써, 각 위치에 대응되는 정확한 PSF를 적용할 수 있다.
또한, 영상 처리부(920)는, 대상체의 움직임 량을 나타내는 모션 벡터(motion vector)에 기초하여, 디블러링된 복수개의 로 데이터로부터 대상체의 움직임이 보정된 최종 단층 영상을 복원한다.
영상 처리부(920)는, 모션 벡터를 사전에 계산하고, 저장부에 미리 저장할 수 있다. 그러면, 영상 처리부(920)는, 저장부에 저장된 모션 벡터에 기초하여, 대상체의 움직임을 보정할 수 있다.
또는, 실시예에 따라, 영상 처리부(920)는, 갠트리 내에 형성되는 시야면을 구성하는 복셀들 각각을 기준으로, PSF에 기초한 디블러링 및 모션 벡터에 기초한 움직임 보정을 수행할 수 있다. 구체적으로, 영상 처리부(920)는, 각 뷰에 대응되는 시점을 계산하고, 갠트리 내에 형성되는 시야면을 구성하는 모든 복셀들에 대하여, 각 시점에 대응되는 모션 벡터에 기초하여 복셀들의 위치를 보정할 수 있다. 전술한 바와 같이, 대상체를 촬영하는 과정에서 대상체가 움직일 수 있고, 시간이 경과함에 따라 대상체의 실제 위치가 달라질 수 있다.
또한, 영상 처리부(920)는, 복수개의 뷰에 대응되는 복수개의 로 데이터에 기초하여, 각 뷰에 대응되면서 갠트리 내에 형성되는 시야면 내의 위치에 따라 변화하는 PSF를 추정할 수 있다. 이에 따라, 영상 처리부(920)는, 특정 시점에서의 대상체의 실제 위치를 고려하여, 복셀들의 위치를 보정하고, 보정된 복셀들의 위치에 대응되는 PSF에 기초하여 디블러링할 수 있다. 그리고, 영상 처리부(920)는, 디블러링된 데이터에 기초하여 최종 단층 영상을 복원할 수 있다.
또한, 도 9b에 도시된 바와 같이, 단층 촬영 장치(100b)는, 데이터 획득부(910) 및 영상 처리부(920) 이외에 저장부(930)를 더 포함할 수 있다.
저장부(930)는, 시간에 따라 변화하는 모션 벡터를 사전에 계산하여 저장할 수 있다. 또한, 저장부(930)는, 대상체를 단층 촬영하는 과정에서 사용되는 임시 데이터 또는 시스템 파라미터를 저장할 수 있다.
한편, 상술한 본 발명의 실시예들은 컴퓨터에서 실행될 수 있는 프로그램으로 작성가능하고, 컴퓨터로 읽을 수 있는 기록매체를 이용하여 상기 프로그램을 동작시키는 범용 디지털 컴퓨터에서 구현될 수 있다.
상기 컴퓨터로 읽을 수 있는 기록매체는 마그네틱 저장매체(예를 들면, 롬, 플로피 디스크, 하드디스크 등), 광학적 판독 매체(예를 들면, 시디롬, 디브이디 등) 및 캐리어 웨이브(예를 들면, 인터넷을 통한 전송)와 같은 저장매체를 포함한다.
이상과 첨부된 도면을 참조하여 본 발명의 실시예를 설명하였지만, 본 발명이 속하는 기술분야에서 통상의 지식을 가진 자는 본 발명이 그 기술적 사상이나 필수적인 특징을 변경하지 않고서 다른 구체적인 형태로 실시될 수 있다는 것을 이해할 수 있을 것이다. 그러므로 이상에서 기술한 실시예들은 모든 면에서 예시적인 것이며 한정적이 아닌 것으로 이해해야만 한다.
Claims (19)
- 대상체를 단층 촬영하여 복수개의 뷰에 대응되는 복수개의 로 데이터를 획득하고, 갠트리 내에 형성되는 시야면(FOV) 내의 위치에 따라 변화하는 PSF에 기초하여 상기 복수개의 로 데이터를 각각 디블러링하는 단계; 및
상기 대상체의 움직임을 나타내는 모션 벡터에 기초하여, 디블러링된 복수개의 로 데이터로부터 상기 대상체의 움직임이 보정된 최종 단층 영상을 복원하는 단계;
를 포함하는, 단층 영상 복원 방법.
- 제 1항에 있어서, 상기 디블러링하는 단계는,
상기 갠트리 내에 형성되는 시야면 내의 위치에 따라 변화하는 PSF에 기초하여, 상기 로 데이터를 디컨볼루션 수행하는 단계를 포함하는, 단층 영상 복원 방법.
- 제 1항에 있어서, 상기 단층 영상 복원 방법은,
대상체를 단층 촬영하여 획득한 서로 다른 뷰에 대응되는 로 데이터들을 이용하여 복수개의 부분 영상들을 획득하는 단계;
상기 복수개의 부분 영상들에 기초하여 상기 대상체의 움직임을 측정하는 단계; 및
상기 측정된 움직임을 상기 모션 벡터로 나타내는 단계;
를 더 포함하는, 단층 영상 복원 방법.
- 제 1항에 있어서, 상기 단층 영상 복원 방법은,
상기 복수개의 로 데이터에 기초하여, 상기 뷰에 대응되는 상기 갠트리 내에 형성되는 시야면 내의 위치에 따라 변화하는 PSF를 추정하는 단계를 더 포함하는, 단층 영상 복원 방법.
- 대상체를 단층 촬영하여 복수개의 뷰에 대응되는 복수개의 로 데이터를 획득하는 단계;
상기 복수개의 뷰 각각에 대응되는 시점을 계산하고, 갠트리 내에 형성되는 시야면을 구성하는 모든 복셀들에 대하여, 상기 각 시점에 대응되는 모션 벡터에 기초하여 상기 복셀들 각각의 위치를 보정하는 단계; 및
보정된 복셀들의 위치에 대응되는 PSF에 기초하여 디블러링하는 단계;
를 포함하는, 단층 영상 복원 방법.
- 제 5항에 있어서, 상기 디블러링하는 단계는,
상기 뷰에 대응되는 각도 및 상기 보정된 복셀의 위치에 기초하여, 상기 보정된 복셀의 위치에 대응되는 PSF를 추정하는 단계를 포함하는, 단층 영상 복원 방법.
- 제 5항에 있어서, 상기 디블러링하는 단계는,
상기 보정된 복셀의 위치에 대응되는 프로젝션 좌표를 계산하는 단계; 및
상기 보정된 복셀의 위치에 대응되는 PSF에 기초하여, 상기 프로젝션 좌표에서 디컨볼루션을 수행하는 단계를 더 포함하는, 단층 영상 복원 방법.
- 제 5항에 있어서, 상기 단층 영상 복원 방법은,
사전에 상기 복수개의 뷰 각각에 대응되는 시점에 대하여, 각 복셀에서의 움직임을 예측하고, 예측된 움직임을 상기 각각의 모션 벡터로 나타내는 단계; 및
상기 각각의 모션 벡터를 저장하는 단계를 더 포함하는, 단층 영상 복원 방법.
- 제 5항에 있어서, 상기 단층 영상 복원 방법은,
디블러링된 데이터에 기초하여, 최종 단층 영상을 복원하는 단계를 더 포함하는, 단층 영상 복원 방법.
- 대상체를 단층 촬영하여 복수개의 뷰에 대응되는 복수개의 로 데이터를 획득하는 데이터 획득부; 및
갠트리 내에 형성되는 시야면 내의 위치에 따라 변화하는 PSF에 기초하여 상기 복수개의 로 데이터를 각각 디블러링하고, 상기 대상체의 움직임을 나타내는 모션 벡터에 기초하여 디블러링된 복수개의 로 데이터로부터 상기 대상체의 움직임이 보정된 최종 단층 영상을 복원하는 영상 처리부;
를 포함하는, 단층 촬영 장치.
- 제 10항에 있어서, 상기 영상 처리부는,
상기 갠트리 내에 형성되는 시야면 내의 위치에 따라 변화하는 PSF에 기초하여, 상기 로 데이터를 디컨볼루션 수행하는, 단층 촬영 장치.
- 제 10항에 있어서, 상기 데이터 획득부는,
대상체를 단층 촬영하여 획득한 서로 다른 뷰에 대응되는 로 데이터들을 이용하여 부분 영상들을 획득하고,
상기 영상 처리부는, 상기 부분 영상들에 기초하여 상기 대상체의 움직임을 측정하고, 상기 측정된 움직임을 상기 모션 벡터로 나타내는, 단층 촬영 장치.
- 제 10항에 있어서, 상기 영상 처리부는,
상기 복수개의 로 데이터에 기초하여, 상기 뷰에 대응되고 상기 갠트리 내에 형성되는 시야면 내의 위치에 따라 변화하는 PSF를 추정하는, 단층 촬영 장치.
- 대상체를 단층 촬영하여 복수개의 뷰에 대응되는 복수개의 로 데이터를 획득하는 데이터 획득부; 및
상기 복수개의 뷰 각각에 대응되는 시점을 계산하고, 갠트리 내에 형성되는 시야면을 구성하는 모든 복셀들에 대하여, 상기 각 시점에 대응되는 모션 벡터에 기초하여 상기 복셀들 각각의 위치를 보정하고, 보정된 복셀들의 위치에 대응되는 PSF에 기초하여 디블러링하는 영상 처리부;
를 포함하는, 단층 촬영 장치.
- 제 14항에 있어서, 상기 영상 처리부는,
상기 뷰에 대응되는 각도 및 상기 보정된 복셀의 위치에 기초하여, 상기 보정된 복셀의 위치에 대응되는 PSF를 추정하는, 단층 촬영 장치.
- 제 14항에 있어서, 상기 영상 처리부는,
상기 보정된 복셀의 위치에 대응되는 프로젝션 좌표를 계산하고, 상기 보정된 복셀의 위치에 대응되는 PSF에 기초하여 상기 프로젝션 좌표에서 디컨볼루션을 수행하는, 단층 촬영 장치.
- 제 14항에 있어서, 상기 단층 촬영 장치는,
저장부를 더 포함하고,
상기 영상 처리부는, 사전에 상기 복수개의 뷰 각각에 대응되는 시점에 대하여, 각 복셀에서의 움직임을 예측하고, 예측된 움직임을 상기 각각의 모션 벡터로 나타내고,
상기 저장부는, 상기 각각의 모션 벡터를 저장하는, 단층 촬영 장치.
- 제 14항에 있어서, 상기 영상 처리부는,
디블러링된 데이터에 기초하여 최종 단층 영상을 복원하는, 단층 촬영 장치.
- 제 1항 내지 제 9항 중 어느 한 항의 단층 영상 복원 방법을 구현하기 위한 프로그램이 기록된 컴퓨터로 판독 가능한 기록 매체.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020160008891A KR20170088681A (ko) | 2016-01-25 | 2016-01-25 | 단층 촬영 장치 및 그에 따른 단층 영상 복원 방법 |
| US15/415,805 US10213179B2 (en) | 2016-01-25 | 2017-01-25 | Tomography apparatus and method of reconstructing tomography image |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020160008891A KR20170088681A (ko) | 2016-01-25 | 2016-01-25 | 단층 촬영 장치 및 그에 따른 단층 영상 복원 방법 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20170088681A true KR20170088681A (ko) | 2017-08-02 |
Family
ID=59360254
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020160008891A Withdrawn KR20170088681A (ko) | 2016-01-25 | 2016-01-25 | 단층 촬영 장치 및 그에 따른 단층 영상 복원 방법 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US10213179B2 (ko) |
| KR (1) | KR20170088681A (ko) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20220159771A (ko) * | 2021-05-26 | 2022-12-05 | 주식회사바텍 | 피검체의 움직임 검출이 가능한 스파이럴 ct 영상 형성 장치 및 방법 |
| KR20240042194A (ko) * | 2021-09-23 | 2024-04-01 | 홀로직, 인크. | 단층촬영술 이득 교정 및 영상 보정 |
Families Citing this family (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015189397A1 (en) * | 2014-06-13 | 2015-12-17 | Siemens Aktiengesellschaft | Intra reconstruction motion correction |
| CN106372035B (zh) * | 2015-07-23 | 2018-12-18 | 清华大学 | 一种点扩散函数估计方法及系统 |
| US10506235B2 (en) | 2015-09-11 | 2019-12-10 | Facebook, Inc. | Distributed control of video encoding speeds |
| US10602157B2 (en) | 2015-09-11 | 2020-03-24 | Facebook, Inc. | Variable bitrate control for distributed video encoding |
| US10602153B2 (en) | 2015-09-11 | 2020-03-24 | Facebook, Inc. | Ultra-high video compression |
| US10063872B2 (en) | 2015-09-11 | 2018-08-28 | Facebook, Inc. | Segment based encoding of video |
| US10499070B2 (en) | 2015-09-11 | 2019-12-03 | Facebook, Inc. | Key frame placement for distributed video encoding |
| US10341561B2 (en) * | 2015-09-11 | 2019-07-02 | Facebook, Inc. | Distributed image stabilization |
| US10375156B2 (en) | 2015-09-11 | 2019-08-06 | Facebook, Inc. | Using worker nodes in a distributed video encoding system |
| KR102555465B1 (ko) * | 2018-06-11 | 2023-07-17 | 삼성전자주식회사 | 단층 영상의 생성 방법 및 그에 따른 엑스선 영상 장치 |
| US11484279B2 (en) | 2018-09-24 | 2022-11-01 | Siemens Medical Solutions Usa, Inc. | Systems to assess projection data inconsistency |
| US11645747B2 (en) * | 2020-02-25 | 2023-05-09 | GE Precision Healthcare LLC | Methods and systems for digital mammography imaging |
| JP7833949B2 (ja) * | 2022-04-13 | 2026-03-23 | 富士フイルム株式会社 | X線ct装置、画像処理装置、及び、ct画像の動き補正画像再構成方法 |
| US12207962B2 (en) * | 2022-04-20 | 2025-01-28 | National Cheng Kung University | Method for measuring muscle mass |
| DE102023204237A1 (de) * | 2023-05-08 | 2024-11-14 | Siemens Healthineers Ag | Erstellen einer Röntgenrekonstruktion mit Ultraschallunterstützung |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000051197A (ja) | 1998-08-05 | 2000-02-22 | Toshiba Corp | 医用画像処理装置 |
| US6236704B1 (en) | 1999-06-30 | 2001-05-22 | Siemens Corporate Research, Inc. | Method and apparatus using a virtual detector for three-dimensional reconstruction from x-ray images |
| US7492967B2 (en) | 2003-09-24 | 2009-02-17 | Kabushiki Kaisha Toshiba | Super-resolution processor and medical diagnostic imaging apparatus |
| JP4519434B2 (ja) | 2003-09-24 | 2010-08-04 | 株式会社東芝 | 超解像処理装置及び医用画像診断装置 |
| US7840249B2 (en) * | 2004-11-24 | 2010-11-23 | University Of Iowa Research Foundation | Clinical micro-CT (CMCT) methods, techniques and apparatus |
| EP2284794B1 (en) | 2004-11-26 | 2017-01-18 | Toshiba Medical Systems Corporation | X-ray CT apparatus and image processing device |
| WO2008156764A1 (en) | 2007-06-15 | 2008-12-24 | The Johns Hopkins University | Methods for motion compensated image reconstruction and systems related thereto |
| DE102011083643A1 (de) | 2011-09-28 | 2013-03-28 | Siemens Aktiengesellschaft | Verfahren, Rechensystem und CT-System zur Bestimmung eines Bewegungsfeldes und zur bewegungskompensierenden Rekonstruktion mit diesem Bewegungsfeld |
| DE102013200163B4 (de) | 2013-01-09 | 2014-09-18 | Siemens Aktiengesellschaft | Verfahren, Schätzeinheit und Computertomografiesystem zur computertomografiebasierten näherungsweisen Ermittlung eines Gefäßdurchmessers |
| US9576391B2 (en) * | 2014-02-21 | 2017-02-21 | Samsung Electronics Co., Ltd. | Tomography apparatus and method of reconstructing a tomography image by the tomography apparatus |
-
2016
- 2016-01-25 KR KR1020160008891A patent/KR20170088681A/ko not_active Withdrawn
-
2017
- 2017-01-25 US US15/415,805 patent/US10213179B2/en not_active Expired - Fee Related
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20220159771A (ko) * | 2021-05-26 | 2022-12-05 | 주식회사바텍 | 피검체의 움직임 검출이 가능한 스파이럴 ct 영상 형성 장치 및 방법 |
| KR20240042194A (ko) * | 2021-09-23 | 2024-04-01 | 홀로직, 인크. | 단층촬영술 이득 교정 및 영상 보정 |
Also Published As
| Publication number | Publication date |
|---|---|
| US10213179B2 (en) | 2019-02-26 |
| US20170209112A1 (en) | 2017-07-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101728046B1 (ko) | 단층 영상 복원 장치 및 그에 따른 단층 영상 복원 방법 | |
| US10213179B2 (en) | Tomography apparatus and method of reconstructing tomography image | |
| KR101636041B1 (ko) | 단층 촬영 장치 및 그에 따른 단층 영상 복원 방법 | |
| KR101725891B1 (ko) | 단층 영상 장치 및 그에 따른 단층 영상 복원 방법 | |
| KR101579111B1 (ko) | 영상 진단 방법, 장치 및 기록매체 | |
| KR102220226B1 (ko) | 컴퓨터 단층 촬영 장치 및 그에 따른 ct 영상 복원 방법 | |
| EP3326533B1 (en) | Tomographic device and tomographic image processing method according to same | |
| KR101775556B1 (ko) | 단층 촬영 장치 및 그에 따른 단층 영상 처리 방법 | |
| KR20160107799A (ko) | 단층 영상 장치 및 그에 따른 단층 영상 복원 방법 | |
| KR101665513B1 (ko) | 컴퓨터 단층 촬영 장치 및 그에 따른 ct 영상 복원 방법 | |
| KR20200095740A (ko) | 의료 영상 장치 및 그 제어방법 | |
| KR20170105876A (ko) | 단층 촬영 장치 및 그에 따른 단층 영상 재구성 방법 | |
| KR101783964B1 (ko) | 단층 촬영 장치 및 그에 따른 단층 영상 복원 방법 | |
| EP3349655B1 (en) | Tomography apparatus and controlling method for the same | |
| KR20160057935A (ko) | 단층 영상 장치 및 그에 따른 단층 영상 복원 방법 | |
| KR20160065674A (ko) | 의료 영상 장치 및 의료 영상 처리 방법 | |
| KR20180054020A (ko) | 의료 영상 장치 및 의료 영상 처리 방법 | |
| KR20170087320A (ko) | 단층 영상 생성 장치 및 그에 따른 단층 영상 복원 방법 | |
| KR101812659B1 (ko) | 단층 촬영 장치 및 그에 따른 단층 영상 복원 방법 | |
| KR20160140189A (ko) | 단층 촬영 장치 및 그에 따른 단층 촬영 방법 | |
| KR102273022B1 (ko) | 단층 촬영 장치 및 그에 따른 단층 영상 복원 방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
Patent event code: PA01091R01D Comment text: Patent Application Patent event date: 20160125 |
|
| PG1501 | Laying open of application | ||
| PC1203 | Withdrawal of no request for examination |