KR20170092533A - 얼굴 포즈 교정 방법 및 장치 - Google Patents
얼굴 포즈 교정 방법 및 장치 Download PDFInfo
- Publication number
- KR20170092533A KR20170092533A KR1020177010873A KR20177010873A KR20170092533A KR 20170092533 A KR20170092533 A KR 20170092533A KR 1020177010873 A KR1020177010873 A KR 1020177010873A KR 20177010873 A KR20177010873 A KR 20177010873A KR 20170092533 A KR20170092533 A KR 20170092533A
- Authority
- KR
- South Korea
- Prior art keywords
- pose
- depth map
- image data
- model
- face
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images







Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V40/00—Recognition of biometric, human-related or animal-related patterns in image or video data
- G06V40/10—Human or animal bodies, e.g. vehicle occupants or pedestrians; Body parts, e.g. hands
- G06V40/16—Human faces, e.g. facial parts, sketches or expressions
-
- G06K9/00221—
-
- G06K9/00214—
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/50—Depth or shape recovery
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/70—Determining position or orientation of objects or cameras
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/60—Type of objects
- G06V20/64—Three-dimensional [3D] objects
- G06V20/653—Three-dimensional [3D] objects by matching three-dimensional models, e.g. conformal mapping of Riemann surfaces
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10024—Color image
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10028—Range image; Depth image; 3D point clouds
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10048—Infrared image
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20068—Projection on vertical or horizontal image axis
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20172—Image enhancement details
- G06T2207/20182—Noise reduction or smoothing in the temporal domain; Spatio-temporal filtering
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30196—Human being; Person
- G06T2207/30201—Face
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Multimedia (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Health & Medical Sciences (AREA)
- General Health & Medical Sciences (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Human Computer Interaction (AREA)
- Software Systems (AREA)
- Image Analysis (AREA)
Abstract
Description
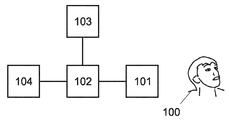
도 2는 본 발명에 따른 장치의 개략도.
도 3은 얼굴의 2D 가시광선 이미지의 일례를 도시한 도면.
도 4는 도 3의 얼굴의 2D 적외선 이미지의 일례를 도시한 도면.
도 5는 도 3의 얼굴의 깊이 맵의 표현의 일례를 도시한 도면.
도 6은 도 3의 얼굴의 텍스처된 깊이 맵의 표현의 일례를 도시한 도면.
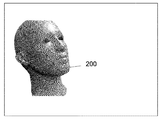
도 7은 머리 포즈 추정을 위해 이용된 일반 머리 모델의 일례를 도시한 도면.
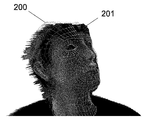
도 8은 3D 모델 내에 깊이 맵을 정렬함으로써 미세 포즈 추정 단계를 도시한 도면.
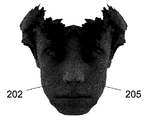
도 9는 깊이 맵의 포즈 교정된 2D 투영을 도시한 도면이고, 깊이 맵에서 존재하지 않는 머리의 부분들에 대응하는 누락 부분들이 표시된다.
도 10은 2.5D 데이터세트의 포즈 교정된 2D 투영을 도시한 도면이고, 깊이 맵에서 존재하지 않는 머리의 부분들에 대응하는 누락 부분들이 재구성된다.
도 11은 2.5D 데이터세트의 포즈 교정된 2D 투영을 도시한 도면이고, 2.5D에서 존재하지 않는 머리의 부분들에 대응하는 누락 부분들이 재구성되고 표시된다.
102: 프로세서
103: 네트워크 인터페이스 104: 메모리
200: 3D 모델 201: 테스트 깊이 맵
202: 2D 텍스처된 투영
Claims (16)
- 얼굴(100) 이미지들을 표현하는 데이터에서 포즈(pose)를 교정하기 위한 포즈 교정 방법에 있어서:
A-2D 근적외선 이미지 데이터, 2D 가시광선 이미지 데이터, 및 깊이 맵을 포함하는 적어도 하나의 테스트 프레임을 획득하는 단계;
C-공지된 방향의 머리의 3D 모델에 따라 상기 깊이 맵을 정렬함으로써 상기 테스트 프레임에서 얼굴의 포즈를 추정하는 단계;
D-텍스처(texture)된 이미지 데이터를 생성하기 위해, 상기 2D 이미지의 적어도 하나를 상기 깊이 맵 상에 매핑하는 단계;
E-포즈 교정된 2D 투영된 이미지를 표현하는 데이터를 생성하기 위해 상기 텍스처된 이미지 데이터를 2D로 투영하는 단계를 포함하는, 포즈 교정 방법. - 제 1 항에 있어서,
상기 깊이 맵에서 포인트들의 시간적 및/또는 공간적 스무딩(smoothing) 단계를 포함하는, 포즈 교정 방법. - 제 1 항 또는 제 2 항에 있어서,
상기 포즈를 추정하는 상기 단계(C)는 예를 들면, 랜덤 포레스트(random forest)에 기초하여 개략적인 포즈 추정을 수행하는 제 1 단계, 및 상기 포즈의 더 정확한 추정을 결정하는 또 다른 단계를 포함하는, 포즈 교정 방법. - 제 1 항 내지 제 3 항 중 어느 한 항에 있어서,
공지된 방향의 머리의 3D 모델에 따라 상기 깊이 맵을 정렬하는 상기 단계(C)는 반복 최근접점(Iterative Closest Points; ICP) 방법을 이용하는, 포즈 교정 방법. - 제 1 항 내지 제 4 항 중 어느 한 항에 있어서,
상기 얼굴에 속하지 않는 상기 2D 근적외선 이미지 데이터의, 및/또는 상기 2D 가시광선 이미지 데이터의, 및/또는 상기 깊이 맵의 적어도 일부 부분들을 제거하기 위해, 상기 포즈의 상기 추정(C) 전에 기본 얼굴 검출 단계(B)를 더 포함하는, 포즈 교정 방법. - 제 1 항 내지 제 5 항 중 어느 한 항에 있어서,
상기 3D 모델은 이용자 독립적인, 포즈 교정 방법. - 제 1 항 내지 제 5 항 중 어느 한 항에 있어서,
상기 3D 모델은 이용자 의존적인, 포즈 교정 방법. - 제 1 항 내지 제 7 항 중 어느 한 항에 있어서,
상기 3D 모델은 상기 3D 모델을 상기 이용자에 적응시키기 위해 휘어지는(warp), 포즈 교정 방법. - 제 1 항 내지 제 8 항 중 어느 한 항에 있어서,
머리의 기존의 3D 모델에 따라 상기 깊이 맵을 정렬하는 상기 단계(C)는 상기 3D 모델을 휘게하는 단계를 포함하는, 포즈 교정 방법. - 제 1 항 내지 제 9 항 중 어느 한 항에 있어서,
상기 2D 근적외선 이미지 데이터에 기초하여 상기 2D 가시광선 이미지 데이터의 부분들의 조명을 정정하는 단계를 더 포함하는, 포즈 교정 방법. - 제 1 항 내지 제 10 항 중 어느 한 항에 있어서,
상기 깊이 맵 상에서 보이지 않는 부분들에 대응하는 상기 포즈 교정된 2D 투영된 이미지 데이터의 부분들을 표시하는(flagging) 단계를 더 포함하는, 포즈 교정 방법. - 제 1 항 내지 제 11 항 중 어느 한 항에 있어서,
상기 깊이 맵의 공지되지 않은 부분들에 대응하는 상기 포즈 교정된 2D 투영된 이미지 데이터의 부분들을 재구성하는 단계를 더 포함하는, 포즈 교정 방법. - 제 1 항 내지 제 12 항 중 어느 한 항에 있어서,
상기 2D 투영된 이미지를 분류하는 단계(F)를 더 포함하는, 포즈 교정 방법. - 장치로서, 2D 근적외선 이미지 데이터, 2D 가시광선 이미지 데이터, 및 깊이 맵을 포함하는 적어도 하나의 테스트 프레임을 획득하기 위해 배열된 깊이 맵 카메라(101) 뿐만 아니라, 프로그램이 실행될 때 상기 프로세서로 하여금 다음의 단계들을 실행하게 하는 상기 프로그램을 저장하는 메모리를 갖는 프로세서를 포함하는, 상기 장치에 있어서:
상기 단계들은,
C-공지된 방향의 머리의 3D 모델에 따라 상기 깊이 맵을 정렬함으로써 상기 테스트 프레임에서 얼굴의 포즈를 추정하는 단계;
D-텍스처된 이미지 데이터를 생성하기 위해, 상기 2D 이미지의 적어도 하나를 상기 깊이 맵 상에 매핑하는 단계;
E-포즈 교정된 2D 투영된 이미지를 표현하는 데이터를 생성하기 위해 상기 텍스처된 이미지 데이터를 2D로 투영하는 단계인, 장치, - 제 1 항 내지 제 14 항 중 어느 한 항의 방법을 수행하기 위한 수단을 포함하는 장치.
- 컴퓨터 프로그램 제품에 있어서:
A-2D 근적외선 이미지 데이터, 2D 가시광선 이미지 데이터, 및 깊이 맵을 포함하는 적어도 하나의 테스트 프레임을 획득하고;
C-공지된 방향의 머리의 3D 모델에 따라 상기 깊이 맵을 정렬함으로써 상기 테스트 프레임에서 얼굴의 포즈를 추정하고;
D-텍스처된 이미지 데이터를 생성하기 위해, 상기 2D 이미지의 적어도 하나를 상기 깊이 맵 상에 매핑하며;
E-포즈 교정된 2D 투영된 이미지를 표현하는 데이터를 생성하기 위해 상기 텍스처된 이미지 데이터를 2D로 투영하도록 실행가능한 지시들을 포함하는 컴퓨터 판독가능한 매체를 포함하는, 컴퓨터 프로그램 제품.
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/EP2014/070282 WO2016045711A1 (en) | 2014-09-23 | 2014-09-23 | A face pose rectification method and apparatus |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20170092533A true KR20170092533A (ko) | 2017-08-11 |
Family
ID=51619169
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020177010873A Ceased KR20170092533A (ko) | 2014-09-23 | 2014-09-23 | 얼굴 포즈 교정 방법 및 장치 |
Country Status (3)
| Country | Link |
|---|---|
| EP (1) | EP3198522A1 (ko) |
| KR (1) | KR20170092533A (ko) |
| WO (1) | WO2016045711A1 (ko) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20210147647A (ko) * | 2020-05-29 | 2021-12-07 | 연세대학교 산학협력단 | 얼굴 이미지 색상 합성 장치 및 방법 |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017197620A1 (en) | 2016-05-19 | 2017-11-23 | Intel Corporation | Detection of humans in images using depth information |
| US11164327B2 (en) | 2016-06-02 | 2021-11-02 | Intel Corporation | Estimation of human orientation in images using depth information from a depth camera |
| CN106709568B (zh) * | 2016-12-16 | 2019-03-22 | 北京工业大学 | 基于深层卷积网络的rgb-d图像的物体检测和语义分割方法 |
| CN106667496B (zh) * | 2017-02-10 | 2020-05-05 | 广州帕克西软件开发有限公司 | 一种面部数据测量方法及装置 |
| CN107220995B (zh) * | 2017-04-21 | 2020-01-03 | 西安交通大学 | 一种基于orb图像特征的icp快速点云配准算法的改进方法 |
| CN108052912A (zh) * | 2017-12-20 | 2018-05-18 | 安徽信息工程学院 | 一种基于矩傅里叶描述子的立体面像识别方法 |
| CN107977650B (zh) * | 2017-12-21 | 2019-08-23 | 北京华捷艾米科技有限公司 | 人脸检测方法及装置 |
| CN108347516A (zh) * | 2018-01-16 | 2018-07-31 | 宁波金晟芯影像技术有限公司 | 一种3d识别的人脸识别系统及方法 |
| CN108549873B (zh) * | 2018-04-19 | 2019-12-24 | 北京华捷艾米科技有限公司 | 三维人脸识别方法和三维人脸识别系统 |
| CN109903378A (zh) * | 2019-03-05 | 2019-06-18 | 盎锐(上海)信息科技有限公司 | 基于人工智能的头发3d建模装置及方法 |
| CN109949412B (zh) * | 2019-03-26 | 2021-03-02 | 腾讯科技(深圳)有限公司 | 一种三维对象重建方法和装置 |
-
2014
- 2014-09-23 WO PCT/EP2014/070282 patent/WO2016045711A1/en not_active Ceased
- 2014-09-23 EP EP14772329.0A patent/EP3198522A1/en not_active Ceased
- 2014-09-23 KR KR1020177010873A patent/KR20170092533A/ko not_active Ceased
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20210147647A (ko) * | 2020-05-29 | 2021-12-07 | 연세대학교 산학협력단 | 얼굴 이미지 색상 합성 장치 및 방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2016045711A1 (en) | 2016-03-31 |
| EP3198522A1 (en) | 2017-08-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9747493B2 (en) | Face pose rectification method and apparatus | |
| EP3241151B1 (en) | An image face processing method and apparatus | |
| US11830141B2 (en) | Systems and methods for 3D facial modeling | |
| KR20170092533A (ko) | 얼굴 포즈 교정 방법 및 장치 | |
| US9818023B2 (en) | Enhanced face detection using depth information | |
| CN106909873B (zh) | 人脸识别的方法和装置 | |
| CN110998659B (zh) | 图像处理系统、图像处理方法、及程序 | |
| CN107852533B (zh) | 三维内容生成装置及其三维内容生成方法 | |
| JP4653606B2 (ja) | 画像認識装置、方法およびプログラム | |
| CN107480613B (zh) | 人脸识别方法、装置、移动终端和计算机可读存储介质 | |
| JP5873442B2 (ja) | 物体検出装置および物体検出方法 | |
| US10304164B2 (en) | Image processing apparatus, image processing method, and storage medium for performing lighting processing for image data | |
| US9727776B2 (en) | Object orientation estimation | |
| CN107479801B (zh) | 基于用户表情的终端显示方法、装置及终端 | |
| CN107563304B (zh) | 终端设备解锁方法及装置、终端设备 | |
| US20160162673A1 (en) | Technologies for learning body part geometry for use in biometric authentication | |
| CN107491744A (zh) | 人体身份识别方法、装置、移动终端和存储介质 | |
| CN107343148A (zh) | 图像补全方法、装置和终端 | |
| CN112016495A (zh) | 人脸识别的方法、装置和电子设备 | |
| JP4850768B2 (ja) | 3次元の人の顔の表面データを再構築するための装置及びプログラム | |
| JP2008261756A (ja) | ステレオ画像対から3次元の頭部姿勢をリアルタイムで推定するための装置及びプログラム | |
| JP2006343859A (ja) | 画像処理装置及び画像処理方法 | |
| Bleiweiss et al. | Robust head pose estimation by fusing time-of-flight depth and color | |
| US11335123B2 (en) | Live facial recognition system and method | |
| CN107343151A (zh) | 图像处理方法、装置和终端 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0105 | International application |
Patent event date: 20170421 Patent event code: PA01051R01D Comment text: International Patent Application |
|
| PG1501 | Laying open of application | ||
| A201 | Request for examination | ||
| PA0201 | Request for examination |
Patent event code: PA02012R01D Patent event date: 20190718 Comment text: Request for Examination of Application |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20200701 Patent event code: PE09021S01D |
|
| E601 | Decision to refuse application | ||
| PE0601 | Decision on rejection of patent |
Patent event date: 20210323 Comment text: Decision to Refuse Application Patent event code: PE06012S01D Patent event date: 20200701 Comment text: Notification of reason for refusal Patent event code: PE06011S01I |