KR20170096800A - 고압유도전동기의 회전자 결함 판정 시스템 및 방법 - Google Patents
고압유도전동기의 회전자 결함 판정 시스템 및 방법 Download PDFInfo
- Publication number
- KR20170096800A KR20170096800A KR1020160018503A KR20160018503A KR20170096800A KR 20170096800 A KR20170096800 A KR 20170096800A KR 1020160018503 A KR1020160018503 A KR 1020160018503A KR 20160018503 A KR20160018503 A KR 20160018503A KR 20170096800 A KR20170096800 A KR 20170096800A
- Authority
- KR
- South Korea
- Prior art keywords
- induction motor
- voltage induction
- rotor
- current state
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R31/00—Arrangements for testing electric properties; Arrangements for locating electric faults; Arrangements for electrical testing characterised by what is being tested not provided for elsewhere
- G01R31/34—Testing dynamo-electric machines
- G01R31/343—Testing dynamo-electric machines in operation
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R19/00—Arrangements for measuring currents or voltages or for indicating presence or sign thereof
- G01R19/0092—Measuring current only
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R19/00—Arrangements for measuring currents or voltages or for indicating presence or sign thereof
- G01R19/165—Indicating that current or voltage is either above or below a predetermined value or within or outside a predetermined range of values
- G01R19/16566—Circuits and arrangements for comparing voltage or current with one or several thresholds and for indicating the result not covered by subgroups G01R19/16504, G01R19/16528, G01R19/16533
- G01R19/1659—Circuits and arrangements for comparing voltage or current with one or several thresholds and for indicating the result not covered by subgroups G01R19/16504, G01R19/16528, G01R19/16533 to indicate that the value is within or outside a predetermined range of values (window)
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R19/00—Arrangements for measuring currents or voltages or for indicating presence or sign thereof
- G01R19/25—Arrangements for measuring currents or voltages or for indicating presence or sign thereof using digital measurement techniques
- G01R19/252—Arrangements for measuring currents or voltages or for indicating presence or sign thereof using digital measurement techniques using analogue/digital converters of the type with conversion of voltage or current into frequency and measuring of this frequency
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R23/00—Arrangements for measuring frequencies; Arrangements for analysing frequency spectra
- G01R23/16—Spectrum analysis; Fourier analysis
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Mathematical Physics (AREA)
- Tests Of Circuit Breakers, Generators, And Electric Motors (AREA)
- Control Of Ac Motors In General (AREA)
Abstract
Description
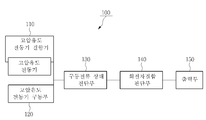
도 2는 본 발명의 일 실시 예에 따른 고압유도전동기의 회전자 결함 판정 시스템(100)의 구동전류상태진단부(130)의 세부 구성을 나타내기 위한 블록도이다.
도 3은 본 발명의 일 실시 예에 따른 고압유도전동기의 회전자 결함 판정 시스템(100)의 구동전류상태진단부(130)에 전류상태DB(132)의 세부 구성을 나타내기 위한 블록도이다.
도 4는 본 발명의 일 실시 예에 따른 고압유도전동기의 회전자 결함 판정 시스템(100)의 구동전류상태진단부(130)에 전류상태분석부(133)의 세부 구성을 나타내기 위한 블록도이다.
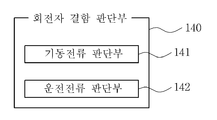
도 5는 본 발명의 일 실시 예에 따른 고압유도전동기의 회전자 결함 판정 시스템(100)의 회전자결함판단부(140)의 세부 구성을 나타내기 위한 블록도이다.
도 6은 본 발명의 일 실시 예에 따른 고압유도전동기의 회전자 결함 판정 방법을 설명하기 위한 동작 흐름도이다.
도 7은 본 발명의 일 실시 예에 따른 고압유도전동기의 회전자 결함 판정 방법 중 S605단계를 설명하기 위한 동작 흐름도이다.
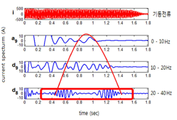
도 8은 본 발명의 일 실시 예에 따른 고압유도전동기의 회전자 결함 판정 시스템(100)의 회전자결함판단부(140)에 기동전류판단부(141)의 ∧패턴의 존재여부를 판단하는 것을 설명하기 위한 전류스팩트럼의 예시도이다.
100 : 고압유도전동기의 회전자 결함 판정 시스템
110 : 고압유도전동기 결합부
120 : 고압유도전동기 구동부
130 : 구동전류상태진단부
131 : 전류상태측정부
132 : 전류상태DB
133 : 전류상태분석부
140 : 회전자결함판단부
141 : 기동전류판단부
142 : 운전전류판단부
150 : 출력부
Claims (10)
- 고압유도전동기의 회전자 결함 판정 시스템에 있어서,
고압유도전동기 구동부(120)를 통해 고압유도전동기를 구동시키기 위해 고압유도전동기 장착하는 고압유도전동기 결합부(110);
상기 고압유도전동기 결합부(110)에 장착된 상기 고압유도전동기에 전원을 공급하여 구동시키는 고압유도전동기 구동부(120);
상기 고압유도전동기 구동부(120)가 상기 고압유도전동기에 공급하는 전류상태를 측정하여 DB화하여 전류상태DB(132)를 생성하고, 상기 전류상태DB(132)를 분석하여 분석결과를 생성하는 구동전류상태진단부(130);
상기 분석결과를 이용하여 상기 고압유도전동기(10)의 상기 회전자의 결함을 판단하는 회전자결함판단부(140); 및
상기 회전자결함판단부(140)의 판단 결과를 DB화 하여 출력하는 출력부(150);
를 포함하는 것을 특징으로 하는 고압유도전동기의 회전자 결함 판정 시스템. - 제1항에 있어서,
상기 구동전류상태진단부(130)는,
상기 고압유도전동기 구동부(120)가 상기 고압유도전동기(10)에 공급하는 전류상태를 측정하여 전류상태DB(132)를 생성하는 전류상태측정부(131);
상기 전류상태측정부(131)에 의해 생성되어, 상기 고압유도전동기 구동부(120)가 상기 고압유도전동기(10)에 공급하는 전류상태정보가 있는 전류상태DB(132); 및
상기 전류상태DB(132)를 분석하여 분석결과를 생성하는 전류상태분석부(133);
를 포함하는 것을 특징으로 하는 고압유도전동기의 회전자 결함 판정 시스템. - 제2항에 있어서,
상기 전류상태DB(132)는,
상기 고압유도전동기 결합부(110)에 장착된 전원이 공급되지 않는 상태의 상기 고압유도전동기(10)에 상기 고압유도전동기 구동부(120)를 통해 전원을 공급하기 시작한 후 운전상태 직전의 전류상태정보가 있는 기동전류상태DB(132a); 및
상기 고압유도전동기 결합부(110)에 장착된 전원이 공급되지 않는 상태의 상기 고압유도전동기(10)에 상기 고압유도전동기 구동부(120)를 통해 전원을 공급하기 시작한 후 운전상태가 된 후의 전류상태정보가 있는 운전전류상태DB(132b);
를 포함하는 것을 특징으로 하는 고압유도전동기의 회전자 결함 판정 시스템. - 제2항에 있어서,
상기 전류상태분석부(133)는,
상기 기동전류상태DB(132a)를 0Hz 내지 10Hz, 10Hz 내지 20Hz 및 20Hz 내지 40Hz의 전류스팩트럼을 생성하는 기동전류분석부(133a); 및
상기 운전전류상태DB(132b)를 진동수로 분해 하는 운전전류분석부(133b);
를 포함하는 것을 특징으로 하는 고압유도전동기의 회전자 결함 판정 시스템. - 제1항에 있어서,
상기 회전자결함판단부(140)는,
상기 기동전류분석부(133a)를 통해 상기 기동전류상태DB(132a)로부터 생성된 상기 전류스팩트럼에 ∧패턴의 존재여부를 판단하여 상기 고압유도전동기(10)의 상기 회전자의 상태를 판단하는 기동전류판단부(141); 및
상기 운전전류분석부(133b)를 통해 상기 운전전류상태DB(132b)를 진동수로 분해된 결과에서 주된 진동수 양 옆에 측파대(sideband)의 크기를 측정하여 상기 고압유도전동기(10)의 상기 회전자의 상태를 판단하는 운전전류판단부(142);
를 포함하는 것을 특징으로 하는 고압유도전동기의 회전자 결함 판정 시스템. - 제1항에 있어서,
상기 회전자결함판단부(140)는,
상기 운전전류판단부(142)를 통해 측정된 주된 진동수 양 옆에 상기 측파대(sideband)의 크기가 -60dB 미만인 경우, 상기 고압유도전동기(10)의 상기 회전자는 정상으로 판단하고,
상기 운전전류판단부(142)를 통해 측정된 주된 진동수 양 옆에 상기 측파대(sideband)의 크기가 -60dB 이상 -50dB 미만이고 상기 기동전류판단부(141)를 통해 상기 전류스팩트럼에 ∧패턴의 존재하는 경우 상기 고압유도전동기(10)의 상기 회전자는 점검이 필요한 것으로 판단하고,
상기 운전전류판단부(142)를 통해 측정된 주된 진동수 양 옆에 상기 측파대(sideband)의 크기가 -50dB 초과인 경우 상기 고압유도전동기(10)의 상기 회전자는 점검이 필요한 것으로 판단하는 것을 특징으로 하는 고압유도전동기의 회전자 결함 판정 시스템. - 고압유도전동기의 회전자 결함 판정 방법에 있어서,
(A) 고압유도전동기(10)를 구동시키기 위해 고압유도전동기 결합부(110)에 장착하는 단계;
(B) 상기 고압유도전동기 결합부(110)에 장착된 상기 고압유도전동기(10)를 고압유도전동기 구동부(120)를 통해 전원을 공급하여 구동시키는 단계;
(C) 구동전류상태진단부(130)를 통해 상기 고압유도전동기 구동부(120)가 상기 고압유도전동기(10)에 공급하는 전류상태를 측정하여 DB화하여 전류상태DB(132)를 생성하는 단계;
(D) 상기 전류상태DB(132)를 상기 구동전류상태진단부(130)를 통해 분석하여 분석결과를 생성하는 단계;
(E) 상기 분석결과를 회전자결함판단부(140)를 통해 상기 고압유도전동기(10)의 상기 회전자의 결함을 판단하는 단계;
(F) 상기 (E) 단계의 판단 결과를 DB화 하여 출력하는 단계;
를 포함하는 것을 특징으로 하는 고압유도전동기의 회전자 결함 판정 방법. - 제7항에 있어서,
상기 전류상태DB(132)는,
상기 고압유도전동기 결합부(110)에 장착된 전원이 공급되지 않는 상태의 상기 고압유도전동기(10)에 상기 고압유도전동기 구동부(120)를 통해 전원을 공급하기 시작한 후 운전상태 직전의 전류상태정보가 있는 기동전류상태DB(132a); 및
상기 고압유도전동기 결합부(110)에 장착된 전원이 공급되지 않는 상태의 상기 고압유도전동기(10)에 상기 고압유도전동기 구동부(120)를 통해 전원을 공급하기 시작한 후 운전상태가 된 후의 전류상태정보가 있는 운전전류상태DB(132b);
를 포함하는 것을 특징으로 하는 고압유도전동기의 회전자 결함 판정 방법. - 제7항에 있어서,
상기 (D) 단계는,
(D1) 상기 기동전류상태DB(132a)를 기동전류분석부(133a)를 통해 0Hz 내지 10Hz, 10Hz 내지 20Hz 및 20Hz 내지 40Hz의 전류스팩트럼을 생성하는 단계;
(D2) 상기 운전전류상태DB(132b)를 운전전류분석부(133b)를 통해 진동수로 분해 하는 단계;
를 포함하는 것을 특징으로 하는 고압유도전동기의 회전자 결함 판정 방법. - 제7항에 있어서,
상기 (E) 단계는,
(E1) 상기 (D2) 단계에서 진동수로 분해된 결과 주된 진동수 양 옆에 측파대(sideband)의 크기가 -60dB 미만인 경우, 상기 고압유도전동기(10)의 상기 회전자는 정상으로 판단하는 단계;
(E2) 상기 (D2) 단계에서 진동수로 분해된 결과 주된 진동수 양 옆에 측파대(sideband)의 크기가 -60dB 이상 -50dB 미만이고 상기 전류스팩트럼을 기동전류판단부(141)를 통해 상기 전류스팩트럼에 ∧패턴의 존재하는 경우, 상기 고압유도전동기(10)의 상기 회전자는 점검이 필요한 것으로 판단하는 단계;
(E3) 상기 (D2) 단계에서 진동수로 분해된 결과 주된 진동수 양 옆에 측파대(sideband)의 크기가 -50dB 초과인 경우, 상기 고압유도전동기(10)의 상기 회전자는 점검이 필요한 것으로 판단하는 단계;
를 포함하는 것을 특징으로 하는 고압유도전동기의 회전자 결함 판정 방법.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020160018503A KR101925394B1 (ko) | 2016-02-17 | 2016-02-17 | 고압유도전동기의 회전자 결함 판정 시스템 및 방법 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020160018503A KR101925394B1 (ko) | 2016-02-17 | 2016-02-17 | 고압유도전동기의 회전자 결함 판정 시스템 및 방법 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20170096800A true KR20170096800A (ko) | 2017-08-25 |
| KR101925394B1 KR101925394B1 (ko) | 2018-12-05 |
Family
ID=59761612
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020160018503A Active KR101925394B1 (ko) | 2016-02-17 | 2016-02-17 | 고압유도전동기의 회전자 결함 판정 시스템 및 방법 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR101925394B1 (ko) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101895837B1 (ko) * | 2018-05-08 | 2018-09-07 | 이에스피 주식회사 | 전동기, 전동기 관련 기동 및 제어장치의 고장진단장치 |
| KR20200025118A (ko) * | 2018-08-29 | 2020-03-10 | 주식회사 포스코 | 회전자 이상 진단 장치 |
| US11372048B2 (en) * | 2019-11-29 | 2022-06-28 | Hitachi, Ltd. | Diagnostic device and diagnostic method |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101169796B1 (ko) | 2011-02-14 | 2012-07-30 | 양철오 | 유도 전동기의 회전자바 고장 진단시스템 |
-
2016
- 2016-02-17 KR KR1020160018503A patent/KR101925394B1/ko active Active
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101895837B1 (ko) * | 2018-05-08 | 2018-09-07 | 이에스피 주식회사 | 전동기, 전동기 관련 기동 및 제어장치의 고장진단장치 |
| KR20200025118A (ko) * | 2018-08-29 | 2020-03-10 | 주식회사 포스코 | 회전자 이상 진단 장치 |
| US11372048B2 (en) * | 2019-11-29 | 2022-06-28 | Hitachi, Ltd. | Diagnostic device and diagnostic method |
Also Published As
| Publication number | Publication date |
|---|---|
| KR101925394B1 (ko) | 2018-12-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101474187B1 (ko) | 소자의 모니터링 방법 | |
| Knight et al. | Mechanical fault detection in a medium-sized induction motor using stator current monitoring | |
| KR102100526B1 (ko) | 임피던스 분석을 기초로 전기기계 시스템을 진단하기 위한 방법 | |
| CN103261904B (zh) | 电动机器的监测和故障诊断 | |
| Becker et al. | Fault detection of circulation pumps on the basis of motor current evaluation | |
| CN106716157B (zh) | 用于确定同步机故障状况的方法和系统 | |
| KR101925394B1 (ko) | 고압유도전동기의 회전자 결함 판정 시스템 및 방법 | |
| KR20180121985A (ko) | 부하의 이상 검출 장치 | |
| CN105874344A (zh) | 用于电机的状态监测的系统、移动电话机及其方法 | |
| US20220170987A1 (en) | Abnormality diagnosis device and abnormality diagnosis method | |
| JP2020153965A (ja) | 異常診断装置および異常診断方法 | |
| US10778124B2 (en) | Integrated monitoring of an electric motor assembly | |
| KR102676587B1 (ko) | 공작기계용 전동기의 온라인 결함 진단 방법 | |
| JP2024529788A (ja) | グラフベースのモーター電流シグネチャ解析を用いた、インバーター駆動誘導電動機における折損した回転子バーを検出するためのシステム | |
| US20200057110A1 (en) | Method For Detecting A Fault In An Electrical Machine | |
| KR20170099175A (ko) | 저전압 고주파 신호를 이용한 영구자석 동기전동기의 고장 진단 방법 및 그 장치 | |
| Akar et al. | Detection of static eccentricity for permanent magnet synchronous motors using the coherence analysis | |
| Iorgulescu et al. | Noise and vibration monitoring for diagnosis of DC motor's faults | |
| JP2010112918A (ja) | モータノイズの検査方法 | |
| JP6994350B2 (ja) | 回転電機及びその診断方法 | |
| Zhu et al. | Practical Aspects of Broken Rotor Bars Detection in PWM Voltage‐Source‐Inverter‐Fed Squirrel‐Cage Induction Motors | |
| Becker et al. | Detection of rotor and impeller faults in wet-rotor pumps | |
| JP2020022260A (ja) | 機械異常予知装置 | |
| EP3246674A1 (en) | Method for diagnostic of magnetic circuits in large electric machines | |
| Djerdir et al. | Faults in permanent magnet traction motors: State of the art and modelling approaches |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| PA0109 | Patent application |
St.27 status event code: A-0-1-A10-A12-nap-PA0109 |
|
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| D13-X000 | Search requested |
St.27 status event code: A-1-2-D10-D13-srh-X000 |
|
| D14-X000 | Search report completed |
St.27 status event code: A-1-2-D10-D14-srh-X000 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| T11-X000 | Administrative time limit extension requested |
St.27 status event code: U-3-3-T10-T11-oth-X000 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| T11-X000 | Administrative time limit extension requested |
St.27 status event code: U-3-3-T10-T11-oth-X000 |
|
| E13-X000 | Pre-grant limitation requested |
St.27 status event code: A-2-3-E10-E13-lim-X000 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| T11-X000 | Administrative time limit extension requested |
St.27 status event code: U-3-3-T10-T11-oth-X000 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U11-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 4 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 5 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 6 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 7 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 8 |
|
| U11 | Full renewal or maintenance fee paid |
Free format text: ST27 STATUS EVENT CODE: A-4-4-U10-U11-OTH-PR1001 (AS PROVIDED BY THE NATIONAL OFFICE) Year of fee payment: 8 |