KR20170096810A - 원격 이미지 전송 시스템, 디스플레이 장치 및 그의 가이드 표시 방법 - Google Patents
원격 이미지 전송 시스템, 디스플레이 장치 및 그의 가이드 표시 방법 Download PDFInfo
- Publication number
- KR20170096810A KR20170096810A KR1020160018533A KR20160018533A KR20170096810A KR 20170096810 A KR20170096810 A KR 20170096810A KR 1020160018533 A KR1020160018533 A KR 1020160018533A KR 20160018533 A KR20160018533 A KR 20160018533A KR 20170096810 A KR20170096810 A KR 20170096810A
- Authority
- KR
- South Korea
- Prior art keywords
- image
- images
- processor
- received
- display device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images

























Classifications
-
- G06F19/3418—
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/0002—Remote monitoring of patients using telemetry, e.g. transmission of vital signals via a communication network
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/0002—Remote monitoring of patients using telemetry, e.g. transmission of vital signals via a communication network
- A61B5/0004—Remote monitoring of patients using telemetry, e.g. transmission of vital signals via a communication network characterised by the type of physiological signal transmitted
- A61B5/0013—Medical image data
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/0002—Remote monitoring of patients using telemetry, e.g. transmission of vital signals via a communication network
- A61B5/0015—Remote monitoring of patients using telemetry, e.g. transmission of vital signals via a communication network characterised by features of the telemetry system
- A61B5/0022—Monitoring a patient using a global network, e.g. telephone networks, internet
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/0059—Measuring for diagnostic purposes; Identification of persons using light, e.g. diagnosis by transillumination, diascopy, fluorescence
- A61B5/0062—Arrangements for scanning
- A61B5/0064—Body surface scanning
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/0059—Measuring for diagnostic purposes; Identification of persons using light, e.g. diagnosis by transillumination, diascopy, fluorescence
- A61B5/0077—Devices for viewing the surface of the body, e.g. camera, magnifying lens
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/103—Measuring devices for testing the shape, pattern, colour, size or movement of the body or parts thereof, for diagnostic purposes
- A61B5/107—Measuring physical dimensions, e.g. size of the entire body or parts thereof
- A61B5/1072—Measuring physical dimensions, e.g. size of the entire body or parts thereof measuring distances on the body, e.g. measuring length, height or thickness
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/103—Measuring devices for testing the shape, pattern, colour, size or movement of the body or parts thereof, for diagnostic purposes
- A61B5/107—Measuring physical dimensions, e.g. size of the entire body or parts thereof
- A61B5/1079—Measuring physical dimensions, e.g. size of the entire body or parts thereof using optical or photographic means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/44—Detecting, measuring or recording for evaluating the integumentary system, e.g. skin, hair or nails
- A61B5/441—Skin evaluation, e.g. for skin disorder diagnosis
- A61B5/444—Evaluating skin marks, e.g. mole, nevi, tumour, scar
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/44—Detecting, measuring or recording for evaluating the integumentary system, e.g. skin, hair or nails
- A61B5/441—Skin evaluation, e.g. for skin disorder diagnosis
- A61B5/445—Evaluating skin irritation or skin trauma, e.g. rash, eczema, wound, bed sore
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/74—Details of notification to user or communication with user or patient; User input means
- A61B5/742—Details of notification to user or communication with user or patient; User input means using visual displays
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/74—Details of notification to user or communication with user or patient; User input means
- A61B5/742—Details of notification to user or communication with user or patient; User input means using visual displays
- A61B5/745—Details of notification to user or communication with user or patient; User input means using visual displays using a holographic display
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F18/00—Pattern recognition
- G06F18/20—Analysing
- G06F18/22—Matching criteria, e.g. proximity measures
-
- G06F19/321—
-
- G06F19/345—
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q50/00—Information and communication technology [ICT] specially adapted for implementation of business processes of specific business sectors, e.g. utilities or tourism
- G06Q50/10—Services
- G06Q50/22—Social work or social welfare, e.g. community support activities or counselling services
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T17/00—Three-dimensional [3D] modelling for computer graphics
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/0002—Inspection of images, e.g. flaw detection
- G06T7/0012—Biomedical image inspection
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/60—Analysis of geometric attributes
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/20—Image preprocessing
- G06V10/255—Detecting or recognising potential candidate objects based on visual cues, e.g. shapes
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/70—Arrangements for image or video recognition or understanding using pattern recognition or machine learning
- G06V10/74—Image or video pattern matching; Proximity measures in feature spaces
- G06V10/75—Organisation of the matching processes, e.g. simultaneous or sequential comparisons of image or video features; Coarse-fine approaches, e.g. multi-scale approaches; using context analysis; Selection of dictionaries
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/20—Cameras or camera modules comprising electronic image sensors; Control thereof for generating image signals from infrared radiation only
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/45—Cameras or camera modules comprising electronic image sensors; Control thereof for generating image signals from two or more image sensors being of different type or operating in different modes, e.g. with a CMOS sensor for moving images in combination with a charge-coupled device [CCD] for still images
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/63—Control of cameras or camera modules by using electronic viewfinders
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/64—Computer-aided capture of images, e.g. transfer from script file into camera, check of taken image quality, advice or proposal for image composition or decision on when to take image
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/66—Remote control of cameras or camera parts, e.g. by remote control devices
- H04N23/661—Transmitting camera control signals through networks, e.g. control via the Internet
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/90—Arrangement of cameras or camera modules, e.g. multiple cameras in TV studios or sports stadiums
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30004—Biomedical image processing
- G06T2207/30088—Skin; Dermal
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V2201/00—Indexing scheme relating to image or video recognition or understanding
- G06V2201/07—Target detection
-
- G—PHYSICS
- G16—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR SPECIFIC APPLICATION FIELDS
- G16H—HEALTHCARE INFORMATICS, i.e. INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR THE HANDLING OR PROCESSING OF MEDICAL OR HEALTHCARE DATA
- G16H30/00—ICT specially adapted for the handling or processing of medical images
- G16H30/20—ICT specially adapted for the handling or processing of medical images for handling medical images, e.g. DICOM, HL7 or PACS
-
- G—PHYSICS
- G16—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR SPECIFIC APPLICATION FIELDS
- G16H—HEALTHCARE INFORMATICS, i.e. INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR THE HANDLING OR PROCESSING OF MEDICAL OR HEALTHCARE DATA
- G16H40/00—ICT specially adapted for the management or administration of healthcare resources or facilities; ICT specially adapted for the management or operation of medical equipment or devices
- G16H40/60—ICT specially adapted for the management or administration of healthcare resources or facilities; ICT specially adapted for the management or operation of medical equipment or devices for the operation of medical equipment or devices
- G16H40/67—ICT specially adapted for the management or administration of healthcare resources or facilities; ICT specially adapted for the management or operation of medical equipment or devices for the operation of medical equipment or devices for remote operation
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/20—Image signal generators
- H04N13/204—Image signal generators using stereoscopic image cameras
- H04N13/239—Image signal generators using stereoscopic image cameras using two two-dimensional [2D] image sensors having a relative position equal to or related to the interocular distance
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/56—Cameras or camera modules comprising electronic image sensors; Control thereof provided with illuminating means
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/667—Camera operation mode switching, e.g. between still and video, sport and normal or high- and low-resolution modes
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/70—Circuitry for compensating brightness variation in the scene
- H04N23/74—Circuitry for compensating brightness variation in the scene by influencing the scene brightness using illuminating means
Landscapes
- Health & Medical Sciences (AREA)
- Engineering & Computer Science (AREA)
- Life Sciences & Earth Sciences (AREA)
- Physics & Mathematics (AREA)
- General Health & Medical Sciences (AREA)
- Medical Informatics (AREA)
- Biomedical Technology (AREA)
- Public Health (AREA)
- Pathology (AREA)
- Heart & Thoracic Surgery (AREA)
- Biophysics (AREA)
- Molecular Biology (AREA)
- Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- Veterinary Medicine (AREA)
- Multimedia (AREA)
- Theoretical Computer Science (AREA)
- Signal Processing (AREA)
- General Physics & Mathematics (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Radiology & Medical Imaging (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Computer Networks & Wireless Communication (AREA)
- Dentistry (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Dermatology (AREA)
- Data Mining & Analysis (AREA)
- Evolutionary Computation (AREA)
- Artificial Intelligence (AREA)
- Software Systems (AREA)
- Geometry (AREA)
- Physiology (AREA)
- Databases & Information Systems (AREA)
- Evolutionary Biology (AREA)
- Bioinformatics & Cheminformatics (AREA)
- Bioinformatics & Computational Biology (AREA)
- Computing Systems (AREA)
- General Engineering & Computer Science (AREA)
- Human Computer Interaction (AREA)
- Business, Economics & Management (AREA)
Abstract
Description
도 2는 본 개시의 일 실시 예에 따른 촬상 장치의 구성을 설명하기 위한 블럭도,
도 3은 본 개시의 일 실시 예에 따른 촬상 장치의 복수의 촬상 소자로부터 얻을 수 있는 정보를 설명하기 위한 도면,
도 4는 본 개시의 일 실시 예에 따른 일반 이미지와 특정 파장으로 촬상한 이미지를 도시한 도면,
도 5는 본 개시의 일 실시 예에 따른 촬상 장치에서의 촬상 타이밍을 설명하기 위한 도면,
도 6은 본 개시의 일 실시 예에 따른 디스플레이 장치의 구성을 설명하기 위한 개략적인 블럭도,
도 7은 본 개시의 일 실시 예에 따른 디스플레이 장치의 구성을 상세히 설명하기 위한 블럭도,
도 8 내지 도 10은 본 개시의 일 실시 예에 따른 가이드 오브젝트를 설명하기 위한 도면,
도 11은 본 개시의 일 실시 예에 따른 환부 영역을 감싸는 그래픽 오브젝트를 도시한 도면,
도 12는 본 개시의 일 실시 예에 따른 환부 영역에 대한 필터 처리 결과를 도시한 도면,
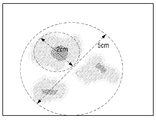
도 13은 본 개시의 일 실시 예에 따른 환부 영역의 크기 정보가 표시된 도면,
도 14는 본 개시의 일 실시 예에 따른 환부의 추이 결과를 비교할 수 있는 그래픽 오브젝트들을 도시한 도면,
도 15a 내지 도 15b는 본 개시의 일 실시 예에 따른 특징점 검출 방법을 설명하기 위한 도면,
도 16은 본 개시의 일 실시 예에 따른 환부 예상 이미지를 생성하는 것을 설명하기 위한 도면,
도 17 및 도 18은 본 개시의 일 실시 예에 따른 가이드 오브젝트를 설명하기 위한 도면,
도 19a 내지 도 19c는 본 개시의 일 실시 예에 따른 3차원 모델 생성 및 조작을 설명하기 위한 도면,
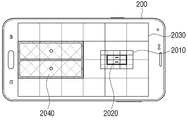
도 20a 내지 도 20b는 본 개시의 다른 실시 예에 따른 라이브뷰 이미지와 수신된 이미지의 크기 매칭 방법을 설명하기 위한 도면,
도 21은 본 개시의 일 실시 예에 따른 디스플레이 장치의 가이드 표시 방법을 설명하기 위한 흐름도, 그리고,
도 22는 본 개시의 일 실시 예에 따른 원격 이미지 전송 시스템의 동작을 설명하기 위한 시퀀스도이다.
110: 촬상부 120: 통신부
130: 프로세서 200: 디스플레이 장치
210: 통신부 220: 디스플레이부
230: 프로세서 240: 메모리
250: 입력부 260: 촬상부
Claims (20)
- 디스플레이 장치;
서로 이격된 복수의 촬상 소자 각각에서 촬상된 복수의 이미지를 상기 디스플레이 장치에 전송하는 촬상 장치;를 포함하고,
상기 디스플레이 장치는,
상기 수신된 복수의 이미지를 이용하여, 촬상된 오브젝트의 물리 정보를 나타내는 가이드 오브젝트를 생성하고, 상기 복수의 이미지 중 적어도 하나의 이미지와 상기 생성된 가이드 오브젝트를 함께 표시하는 원격 이미지 전송 시스템. - 제1항에 있어서,
상기 촬상 장치는,
서로 이격된 복수의 촬상 소자 각각에서 촬상된 복수의 이미지를 생성하는 촬상부;
상기 디스플레이 장치와 송수신하는 통신부; 및
상기 복수의 촬상 소자 사이의 이격 거리 및 상기 복수의 촬상 소자의 초점 거리를 나타내는 정보를, 상기 촬상된 복수의 이미지와 함께 상기 디스플레이 장치로 전송하도록 상기 통신부를 제어하는 프로세서;를 포함하는 원격 이미지 전송 시스템. - 제2항에 있어서,
상기 촬상 장치는,
적외선 파장의 광을 조사하는 광원부;를 더 포함하고,
상기 복수의 촬상 소자 중 적어도 하나는 상기 광원부에서 조사된 적외선 파장의 광에 의한 반사광을 수광하는 원격 이미지 전송 시스템. - 제2항에 있어서,
상기 프로세서는,
상기 복수의 촬상 소자 각각이 동일한 시점에 촬상하도록 상기 촬상부를 제어하는 원격 이미지 전송 시스템. - 제2항에 있어서,
상기 프로세서는,
상기 복수의 촬상 소자가 교번적으로 상이한 시점에 촬상하도록 상기 촬상부를 제어하는 원격 이미지 전송 시스템. - 제1항에 있어서,
상기 디스플레이 장치는,
상기 촬상 장치와 송수신하는 통신부;
디스플레이부; 및
상기 수신된 복수의 이미지를 이용하여, 촬상된 오브젝트의 물리 정보를 나타내는 가이드 오브젝트를 생성하고, 상기 수신된 복수의 이미지 중 적어도 하나의 이미지와 상기 생성된 가이드 오브젝트를 함께 표시하도록 상기 디스플레이부를 제어하는 프로세서;를 포함하는 원격 이미지 전송 시스템. - 제6항에 있어서,
상기 가이드 오브젝트는 룰러, 그리드, 화살표 중 적어도 하나의 형태로 생성되는 원격 이미지 전송 시스템. - 제6항에 있어서,
상기 프로세서는,
상기 수신된 복수의 이미지 중 적어도 하나의 이미지에서 환부 영역을 검출하고, 상기 검출된 환부 영역을 감싸는 그래픽 오브젝트를 생성하는 원격 이미지 전송 시스템. - 제8항에 있어서,
상기 프로세서는,
상기 검출된 환부 영역의 이미지 특성을 변경하는 필터 처리를 수행하는 원격 이미지 전송 시스템. - 제8항에 있어서,
상기 프로세서는,
현재의 환부 영역을 감싸는 상기 그래픽 오브젝트 및 이전에 수신된 이미지에서 검출된 이전의 환부 영역에 대해 기생성된 그래픽 오브젝트를 함께 표시하도록 상기 디스플레이부를 제어하는 원격 이미지 전송 시스템. - 제10항에 있어서,
상기 프로세서는,
상기 수신된 이미지로부터 특징점을 추출하고, 상기 추출된 특징점을 기준으로 상기 현재의 환부 영역을 감싸는 그래픽 오브젝트 및 상기 기생성된 그래픽 오브젝트의 크기를 매칭하는 원격 이미지 전송 시스템. - 제6항에 있어서,
상기 디스플레이 장치는,
오브젝트를 선택받는 입력부;를 더 포함하고,
상기 프로세서는,
상기 선택된 오브젝트의 크기 정보를 표시하는 가이드 오브젝트를 생성하는 원격 이미지 전송 시스템. - 제6항에 있어서,
상기 프로세서는,
상기 수신된 복수의 이미지를 이용하여, 상기 복수의 이미지에 포함된 오브젝트의 3차원 모델을 생성하는 원격 이미지 전송 시스템. - 제6항에 있어서,
상기 디스플레이 장치는,
서로 이격된 복수의 촬상 소자 각각에서 촬상된 복수의 이미지를 생성하는 촬상부;를 더 포함하고,
상기 수신된 복수의 이미지를 이용하여 상기 촬상 장치에서 촬상된 오브젝트의 물리 정보를 추출하고, 상기 촬상된 복수의 이미지를 이용하여 상기 촬상된 공간의 물리 정보를 추출하며,
상기 수신된 복수의 이미지 중 적어도 하나의 이미지와 상기 디스플레이 장치에서 촬상된 복수의 이미지 중 적어도 하나의 이미지를 상기 추출된 각각의 물리 정보에 기초하여 함께 표시하는 원격 이미지 전송 시스템. - 외부 장치와 송수신하는 통신부;
디스플레이부; 및
상기 외부 장치로부터 수신된 복수의 이미지를 이용하여, 상기 수신된 복수의 이미지에 포함된 오브젝트의 물리 정보를 나타내는 가이드 오브젝트를 생성하고, 상기 수신된 복수의 이미지 중 적어도 하나의 이미지와 상기 생성된 가이드 오브젝트를 함께 표시하도록 상기 디스플레이부를 제어하는 프로세서;를 포함하는 디스플레이 장치. - 디스플레이 장치의 가이드 표시 방법에 있어서,
외부 장치로부터 복수의 이미지를 수신하는 단계;
상기 수신된 복수의 이미지에 포함된 오브젝트의 물리 정보를 나타내는 가이드 오브젝트를 생성하는 단계; 및
상기 수신된 복수의 이미지 중 적어도 하나의 이미지와 상기 생성된 가이드 오브젝트를 함께 표시하는 단계;를 포함하는 가이드 표시 방법. - 제16항에 있어서,
상기 수신된 복수의 이미지 중 적어도 하나의 이미지에서 환부 영역을 검출하는 단계;
상기 검출된 환부 영역을 감싸는 그래픽 오브젝트를 생성하는 단계; 및
상기 생성된 그래픽 오브젝트를 표시하는 단계;를 더 포함하는 가이드 표시 방법. - 제17항에 있어서,
이전에 수신된 이미지에서 검출된 이전 환부 영역에 대해 기생성된 그래픽 오브젝트를 현재 환부 영역을 감싸는 그래픽 오브젝트와 크기를 매칭하여 표시하는 단계;를 더 포함하는 가이드 표시 방법. - 제18항에 있어서,
상기 크기를 매칭하여 표시하는 단계는,
상기 수신된 이미지로부터 특징점을 추출하는 단계; 및
상기 추출된 특징점을 기준으로 상기 현재 환부 영역을 감싸는 그래픽 오브젝트 및 상기 기생성된 그래픽 오브젝트의 크기를 매칭하는 단계;를 포함하는 가이드 표시 방법. - 제16항에 있어서,
상기 가이드 오브젝트를 생성하는 단계는,
상기 수신된 이미지에 포함된 오브젝트를 선택받는 단계; 및
상기 선택된 오브젝트의 크기 정보를 표시하는 가이드 오브젝트를 생성하는 단계;를 포함하는 가이드 표시 방법.
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020160018533A KR102508831B1 (ko) | 2016-02-17 | 2016-02-17 | 원격 이미지 전송 시스템, 디스플레이 장치 및 그의 가이드 표시 방법 |
| US15/403,309 US10607340B2 (en) | 2016-02-17 | 2017-01-11 | Remote image transmission system, display apparatus, and guide displaying method thereof |
| PCT/KR2017/000751 WO2017142223A1 (en) | 2016-02-17 | 2017-01-23 | Remote image transmission system, display apparatus, and guide displaying method thereof |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020160018533A KR102508831B1 (ko) | 2016-02-17 | 2016-02-17 | 원격 이미지 전송 시스템, 디스플레이 장치 및 그의 가이드 표시 방법 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20170096810A true KR20170096810A (ko) | 2017-08-25 |
| KR102508831B1 KR102508831B1 (ko) | 2023-03-10 |
Family
ID=59562240
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020160018533A Active KR102508831B1 (ko) | 2016-02-17 | 2016-02-17 | 원격 이미지 전송 시스템, 디스플레이 장치 및 그의 가이드 표시 방법 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US10607340B2 (ko) |
| KR (1) | KR102508831B1 (ko) |
| WO (1) | WO2017142223A1 (ko) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019027190A1 (ko) | 2017-07-31 | 2019-02-07 | 주식회사 엘지화학 | 배터리 관리 장치 및 이를 포함하는 배터리 팩 |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9179844B2 (en) | 2011-11-28 | 2015-11-10 | Aranz Healthcare Limited | Handheld skin measuring or monitoring device |
| KR102508831B1 (ko) * | 2016-02-17 | 2023-03-10 | 삼성전자주식회사 | 원격 이미지 전송 시스템, 디스플레이 장치 및 그의 가이드 표시 방법 |
| US11116407B2 (en) * | 2016-11-17 | 2021-09-14 | Aranz Healthcare Limited | Anatomical surface assessment methods, devices and systems |
| EP4183328A1 (en) | 2017-04-04 | 2023-05-24 | Aranz Healthcare Limited | Anatomical surface assessment methods, devices and systems |
| FR3096126B1 (fr) * | 2019-05-15 | 2021-04-23 | Vit | Procede d'inspection optique d'un objet |
| US12039726B2 (en) | 2019-05-20 | 2024-07-16 | Aranz Healthcare Limited | Automated or partially automated anatomical surface assessment methods, devices and systems |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012120812A (ja) | 2010-12-06 | 2012-06-28 | Advas Co Ltd | 歯科治療におけるビデオカメラによる治療支援システム |
| US20120206587A1 (en) * | 2009-12-04 | 2012-08-16 | Orscan Technologies Ltd | System and method for scanning a human body |
Family Cites Families (36)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6018587A (en) * | 1991-02-21 | 2000-01-25 | Applied Spectral Imaging Ltd. | Method for remote sensing analysis be decorrelation statistical analysis and hardware therefor |
| US5631973A (en) | 1994-05-05 | 1997-05-20 | Sri International | Method for telemanipulation with telepresence |
| JPH10285587A (ja) | 1997-03-31 | 1998-10-23 | Tsushin Hoso Kiko | マルチウインドウ画像表示方式とこの方式を使用した遠隔検査システム |
| US20020036617A1 (en) * | 1998-08-21 | 2002-03-28 | Timothy R. Pryor | Novel man machine interfaces and applications |
| US7028899B2 (en) * | 1999-06-07 | 2006-04-18 | Metrologic Instruments, Inc. | Method of speckle-noise pattern reduction and apparatus therefore based on reducing the temporal-coherence of the planar laser illumination beam before it illuminates the target object by applying temporal phase modulation techniques during the transmission of the plib towards the target |
| JP3461135B2 (ja) | 1999-01-28 | 2003-10-27 | 日本電信電話株式会社 | 立体画像入出力装置 |
| CN100379391C (zh) | 2002-05-07 | 2008-04-09 | 国立大学法人京都大学 | 医疗舱系统 |
| US7818041B2 (en) | 2004-07-07 | 2010-10-19 | Young Kim | System and method for efficient diagnostic analysis of ophthalmic examinations |
| US7889931B2 (en) * | 2004-10-22 | 2011-02-15 | Gb Investments, Inc. | Systems and methods for automated vehicle image acquisition, analysis, and reporting |
| US8838210B2 (en) * | 2006-06-29 | 2014-09-16 | AccuView, Inc. | Scanned laser vein contrast enhancer using a single laser |
| US8831299B2 (en) | 2007-05-22 | 2014-09-09 | Intellectual Ventures Fund 83 Llc | Capturing data for individual physiological monitoring |
| US7995798B2 (en) * | 2007-10-15 | 2011-08-09 | Given Imaging Ltd. | Device, system and method for estimating the size of an object in a body lumen |
| US10354407B2 (en) * | 2013-03-15 | 2019-07-16 | Spatial Cam Llc | Camera for locating hidden objects |
| US8488246B2 (en) * | 2010-02-28 | 2013-07-16 | Osterhout Group, Inc. | See-through near-eye display glasses including a curved polarizing film in the image source, a partially reflective, partially transmitting optical element and an optically flat film |
| US8964298B2 (en) * | 2010-02-28 | 2015-02-24 | Microsoft Corporation | Video display modification based on sensor input for a see-through near-to-eye display |
| US8908928B1 (en) * | 2010-05-31 | 2014-12-09 | Andrew S. Hansen | Body modeling and garment fitting using an electronic device |
| US8655053B1 (en) * | 2010-05-31 | 2014-02-18 | Andrew S Hansen | Body modeling and garment fitting using an electronic device |
| US9076310B2 (en) | 2010-07-30 | 2015-07-07 | Lg Electronics Inc. | Method and electronic device for remote diagnosis |
| US9696897B2 (en) * | 2011-10-19 | 2017-07-04 | The Regents Of The University Of California | Image-based measurement tools |
| EP2929527B1 (en) * | 2011-12-06 | 2020-11-18 | E- Vision Smart Optics, Inc. | Systems, devices, and/or methods for providing images |
| KR101512068B1 (ko) | 2012-06-22 | 2015-04-15 | 서울대학교병원 (분사무소) | 원격 진료 서비스 시스템 및 방법 |
| US9599632B2 (en) * | 2012-06-22 | 2017-03-21 | Fitbit, Inc. | Fitness monitoring device with altimeter |
| KR20140083856A (ko) * | 2012-12-26 | 2014-07-04 | 가톨릭대학교 산학협력단 | 복합 실제 3차원 영상 제작방법 및 이를 위한 시스템 |
| US9456067B2 (en) * | 2012-12-28 | 2016-09-27 | Trimble Navigation Limited | External electronic distance measurement accessory for a mobile data collection platform |
| US9639941B2 (en) * | 2012-12-28 | 2017-05-02 | Trimble Inc. | Scene documentation |
| US9459697B2 (en) * | 2013-01-15 | 2016-10-04 | Leap Motion, Inc. | Dynamic, free-space user interactions for machine control |
| US9256963B2 (en) * | 2013-04-09 | 2016-02-09 | Elc Management Llc | Skin diagnostic and image processing systems, apparatus and articles |
| WO2014179277A1 (en) * | 2013-04-30 | 2014-11-06 | Tractus Corporation | Hand-held imaging devices with position and/or orientation sensors for complete examination of tissue |
| KR20150061750A (ko) | 2013-11-28 | 2015-06-05 | (주) 임베디드 솔루션 | 적외선 방식 뎁스 카메라 및 뎁스영상 기반 원격진료 자세유도 시스템 |
| EP3077956B1 (en) | 2013-12-03 | 2023-10-11 | Children's National Medical Center | Method and system for wound assessment and management |
| EP3076366A4 (en) * | 2014-02-03 | 2017-05-24 | Prosper Creative Co., Ltd. | Image inspecting device and image inspecting program |
| US9560968B2 (en) * | 2014-06-27 | 2017-02-07 | Nucleus Dynamics Pte. Ltd. | Remote monitoring framework |
| WO2016032048A1 (ko) * | 2014-08-28 | 2016-03-03 | 엘지전자 주식회사 | 근접 센서 및 이의 제어 방법 |
| KR102155094B1 (ko) * | 2014-08-28 | 2020-09-11 | 엘지전자 주식회사 | 이동 단말기 및 그 제어방법 |
| WO2017070629A1 (en) * | 2015-10-23 | 2017-04-27 | Fluke Corporation | Imaging tool for vibration and/or misalignment analysis |
| KR102508831B1 (ko) * | 2016-02-17 | 2023-03-10 | 삼성전자주식회사 | 원격 이미지 전송 시스템, 디스플레이 장치 및 그의 가이드 표시 방법 |
-
2016
- 2016-02-17 KR KR1020160018533A patent/KR102508831B1/ko active Active
-
2017
- 2017-01-11 US US15/403,309 patent/US10607340B2/en not_active Expired - Fee Related
- 2017-01-23 WO PCT/KR2017/000751 patent/WO2017142223A1/en not_active Ceased
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20120206587A1 (en) * | 2009-12-04 | 2012-08-16 | Orscan Technologies Ltd | System and method for scanning a human body |
| JP2012120812A (ja) | 2010-12-06 | 2012-06-28 | Advas Co Ltd | 歯科治療におけるビデオカメラによる治療支援システム |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019027190A1 (ko) | 2017-07-31 | 2019-02-07 | 주식회사 엘지화학 | 배터리 관리 장치 및 이를 포함하는 배터리 팩 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR102508831B1 (ko) | 2023-03-10 |
| WO2017142223A1 (en) | 2017-08-24 |
| US20170236273A1 (en) | 2017-08-17 |
| US10607340B2 (en) | 2020-03-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102508831B1 (ko) | 원격 이미지 전송 시스템, 디스플레이 장치 및 그의 가이드 표시 방법 | |
| US12169881B2 (en) | Augmented reality interventional system providing contextual overylays | |
| RU2740259C2 (ru) | Позиционирование датчика ультразвуковой визуализации | |
| US20200022769A1 (en) | Surgical system with haptic feedback based upon quantitative three-dimensional imaging | |
| US10492873B2 (en) | Medical spatial orientation system | |
| EP3477655B1 (en) | Medical imaging apparatus for transmitting a medical image | |
| JP2018514352A (ja) | 後期マーカー配置による融合イメージベース誘導のためのシステムおよび方法 | |
| US10269453B2 (en) | Method and apparatus for providing medical information | |
| WO2017033516A1 (ja) | 読影支援装置及び方法 | |
| JP7417337B2 (ja) | 情報処理システム、情報処理方法及びプログラム | |
| EP4189698A1 (en) | Devices, systems, and methods for identifying unexamined regions during a medical procedure | |
| US11771506B2 (en) | Method and system for controlling dental machines | |
| WO2021138262A1 (en) | Systems and methods for telestration with spatial memory | |
| CN110018733A (zh) | 确定用户触发意图的方法、设备和存储器设备 | |
| KR20130082637A (ko) | 투명 디스플레이를 이용한 의료서비스 제공 장치 | |
| US20250082174A1 (en) | Medical information processing system, medical information processing method, and program | |
| JP2021509298A (ja) | 損傷に関連付けられたデータを取得するためのシステム及び方法 | |
| JP2013257830A (ja) | 情報処理装置 | |
| JP2017016347A (ja) | 情報処理装置、情報処理方法及びプログラム | |
| KR20220076579A (ko) | 입체 영상을 표시하는 전자 장치 및 방법 | |
| JP2015039615A (ja) | 医用画像処理装置及び医用画像表示システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
Patent event code: PA01091R01D Comment text: Patent Application Patent event date: 20160217 |
|
| PG1501 | Laying open of application | ||
| A201 | Request for examination | ||
| PA0201 | Request for examination |
Patent event code: PA02012R01D Patent event date: 20201216 Comment text: Request for Examination of Application Patent event code: PA02011R01I Patent event date: 20160217 Comment text: Patent Application |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20220624 Patent event code: PE09021S01D |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
Patent event code: PE07011S01D Comment text: Decision to Grant Registration Patent event date: 20221215 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
Comment text: Registration of Establishment Patent event date: 20230307 Patent event code: PR07011E01D |
|
| PR1002 | Payment of registration fee |
Payment date: 20230308 End annual number: 3 Start annual number: 1 |
|
| PG1601 | Publication of registration |