KR20170102992A - 선박 보조 도킹 방법과 시스템 - Google Patents
선박 보조 도킹 방법과 시스템 Download PDFInfo
- Publication number
- KR20170102992A KR20170102992A KR1020177022392A KR20177022392A KR20170102992A KR 20170102992 A KR20170102992 A KR 20170102992A KR 1020177022392 A KR1020177022392 A KR 1020177022392A KR 20177022392 A KR20177022392 A KR 20177022392A KR 20170102992 A KR20170102992 A KR 20170102992A
- Authority
- KR
- South Korea
- Prior art keywords
- data
- module
- ship
- signal receiving
- gps signal
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images








Classifications
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G3/00—Traffic control systems for marine craft
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/50—Depth or shape recovery
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/70—Determining position or orientation of objects or cameras
- G06T7/73—Determining position or orientation of objects or cameras using feature-based methods
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G3/00—Traffic control systems for marine craft
- G08G3/02—Anti-collision systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B2213/00—Navigational aids and use thereof, not otherwise provided for in this class
- B63B2213/02—Navigational aids and use thereof, not otherwise provided for in this class using satellite radio beacon positioning systems, e.g. the Global Positioning System GPS
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63H—MARINE PROPULSION OR STEERING
- B63H25/00—Steering; Slowing-down otherwise than by use of propulsive elements; Dynamic anchoring, i.e. positioning vessels by means of main or auxiliary propulsive elements
- B63H25/02—Initiating means for steering, for slowing down, otherwise than by use of propulsive elements, or for dynamic anchoring
- B63H25/04—Initiating means for steering, for slowing down, otherwise than by use of propulsive elements, or for dynamic anchoring automatic, e.g. reacting to compass
- B63H2025/045—Initiating means for steering, for slowing down, otherwise than by use of propulsive elements, or for dynamic anchoring automatic, e.g. reacting to compass making use of satellite radio beacon positioning systems, e.g. the Global Positioning System [GPS]
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/01—Satellite radio beacon positioning systems transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/13—Receivers
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/38—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system
- G01S19/39—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system the satellite radio beacon positioning system transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/53—Determining attitude
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20024—Filtering details
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30248—Vehicle exterior or interior
- G06T2207/30252—Vehicle exterior; Vicinity of vehicle
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Ocean & Marine Engineering (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Theoretical Computer Science (AREA)
- Position Fixing By Use Of Radio Waves (AREA)
- Traffic Control Systems (AREA)
- Navigation (AREA)
Abstract
Description









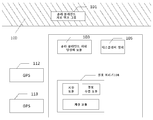
도 2는 설비의 장착 위치도이다.
도 3은 카메라 교정 순서도이다.
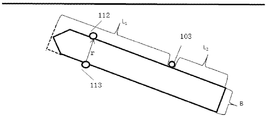
도 4는 자외광 어레이와 촬영 위치도이다.
도 5는 솔라 블라인드 자외램프 어레이의 위치도이다.
도 6은 (a)점 행렬(dot matrix) 좌표계와 (b)카메라 좌표계이다.
도 7은 도킹 소프트웨어 수행 순서도이다.
도 8은 선박과 해안선의 안내도이다.
도 9는 측정 모듈 위치 안내도이다.
도 10은 표준화 자기 상관 알고리즘 순서이다.
















Claims (17)
- 선박에 하나의 솔라 블라인드 자외 영상화 모듈과 데이터 처리 모듈을 설치하고, 솔라 블라인드 자외 영상화 모듈은 수신한 물가에 기설정된 솔라 블라인드 자외 광원 어레이가 발송한 솔라 블라인드 자외광 신호에 의해 상기 선박과 관련되는 정박 위치와의 위치 관계 정보를 측정하는 것을 포함하는 선박 보조 도킹 방법에 있어서,
1) 관련되는 위성으로부터 상기 선박의 위치 신호를 수신하는데 사용하기 위한 적어도 2개의 GPS 신호 수신 모듈을 설치하고 그 중의 적어도 하나의 GPS 신호 수신 모듈은 상기 선박에 설치되며;
2) 상기 데이터 처리 모듈은 신호 수신 소자를 포함하고, 유선 및/또는 무선의 방식으로 상기 솔라 블라인드 자외 영상화 모듈 및 상기 GPS 신호 수신 모듈과 매칭할 수 있으며 상기 솔라 블라인드 자외 영상화 모듈과 상기 GPS 신호 수신 모듈로부터 선박 위치와 관련되는 데이터를 수신하여 상기 선박 기준점의 좌표치를 계산해 내고 상기 솔라 블라인드 자외 영상화 모듈과 상기 선박에 장착한 GPS 신호 수신 모듈의 위치 데이터에 근거하여 정박 위치 해안선에 대한 상기 선박의 자세각을 확정하는 단계
를 포함하는 것을 특징으로 하는 선박 보조 도킹 방법. - 제1항에 있어서,
위성과 관련되는 위치 고정 신호를 각각 수신하기 위하여 상기 선박에 2개 이상의 GPS 신호 수신 모듈을 장착하고, 선박상의 GPS 신호 수신 모듈의 링크에 의하여 정박 위치 해안선에 대한 상기 선박의 자세각을 확정하는 것을 특징으로 하는 선박 보조 도킹 방법. - 제1항에 있어서,
물가에 적어도 하나의 GPS 신호 수신 모듈을 설치하고, 선박상의 각각의 GPS 신호 수신 모듈이 물가에 있는 GPS 신호 수신 모듈과 협동 작업을 진행하여 GPS 차동 시스템을 구성하고, 여기서 물가에 있는 GPS 신호 수신 모듈은 GPS 모국으로 작용하고, 선박상의 GPS 신호 수신 모듈은 GPS 종국으로 작용하며, 상기 GPS 모국을 이용하여 GPS 종국이 선박 위치와 자세각 데이터에 대한 측정 정밀도를 증진시키고, 상기 GPS 모국은 관련되는 위성으로부터 위치 데이터를 수신한 후 데이터 처리 모듈에 직접 발송하여 상기 선박의 위치 데이터를 획득할 수 있으며, 상기 위치 데이터 및 GPS 종국의 위치 데이터 정밀도의 증진에 유리한 기타 데이터를 먼저 적어도 하나의 GPS 종국에 발송한 다음 GPS 종국이 수신된 GPS 위치 수신 데이터를 통합한 후 상기 데이터에 대해 처리한 다음 데이터를 상기 데이터 처리 모듈에 다시 발송하여 상기 선박의 위치 데이터를 획득할 수도 있는 것을 특징으로 하는 선박 보조 도킹 방법. - 제3항에 있어서,
상기 GPS 모국은 자신의 위치 데이터를 무선 또는 유선의 방식에 의해 먼저 하나의 발사 포인트까지 발송한 후 다시 해당 발사 포인트로부터 앞 단계와 동일하거나 다른 주파수로 위치 데이터를 상기 GPS 종국에 무선적으로 발송하는 것을 특징으로 하는 선박 보조 도킹 방법. - 제2항 내지 제4항 중의 어느 한 항에 있어서,
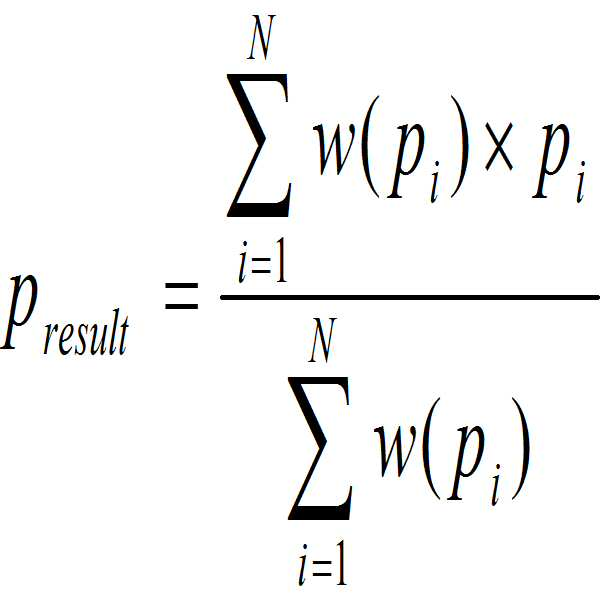
상기 선박에 두 개 이상의 GPS 신호 수신 모듈을 장착하고 데이터 처리 모듈은 상기 솔라 블라인드 자외 영상화 모듈과 상기 선박상의 GPS 신호 수신 모듈이 획득한 N개의 선박 위치 관련 데이터에 대해 표준화 자기상관 처리를 진행하고, 상기 자기상관 처리는 전반적인 오차 분석을 통하여 모든 솔라 블라인드 자외 영상화 모듈과 GPS 신호 수신 모듈로 구성된 검측 시스템의 신뢰도 평균치의 역치 및 각 모듈의 신뢰도 상황을 획득하고 해당 역치를 이용하여 신뢰도가 비교적 낮은 위치 고정 데이터를 여과제거시킴으로써 최종적인 각 모듈의 신뢰도 가중을 얻은 다음 해당 신뢰도 가중을 이용하여 각 모듈에 대해 가중평균을 진행하면 최종의 데이터를 얻을 수 있는 것을 특징으로 하는 선박 보조 도킹 방법. - 제5항에 있어서,
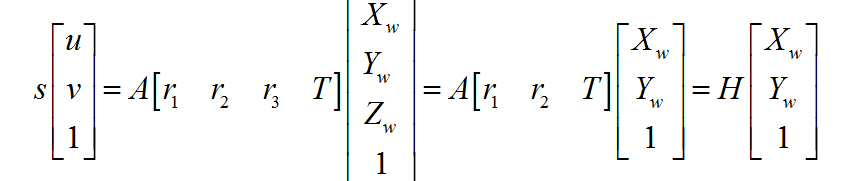
상기 솔라 블라인드 자외 영상화 모듈 및 GPS 신호 수신 모듈이 위치한 좌표치를 x, y 및 z로 표시하고, 벡터로 N그룹의 검측 서브 시스템으로부터 반환된 N그룹의 경각도와 공간 변환 후의 위치 고정 데이터 중의 제i그룹의 위치 고정 데이터를 표시하며, 여기서, i=1, 2, 3,…,N; N=GPS신호 수신 모듈의 개수+1이고; 상기 경각도와 공간 변환 후의 위치 고정 데이터를 획득하는 방법은 모든 솔라 블라인드 자외 영상화 모듈과 GPS 신호 수신 모듈의 상대적 위치와 선박 자세각을 이미 알고 있는 상황하에서 공간 위치 관계와 공간 기하 변환을 이용하여 상이한 측정 모듈에 대한 위치 측정 데이터를 동일한 측정 모듈에 대한 위치 측정 데이터로 전환시키는 것이고; 데이터 처리 모듈이 표준화 자기상관 처리를 진행함에 있어서 구체적인 단계는 다음과 같으며;
표준화 상관계수 NCC를 사용하여 N그룹의 검측 서브 시스템이 위치 고정 데이터를 반환하는 신뢰도를 표시하고,
(1)
j=1, 2, 3,…,N이고;
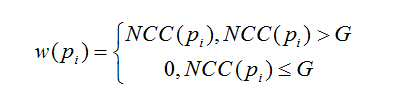
하나의 모든 솔라 블라인드 자외 영상화 모듈과 GPS 신호 수신 모듈로 구성된 검측 시스템의 신뢰도 평균치의 역치 G를 설정하고 해당 역치 G에 의해 NCC가 비교적 낮은 위치 고정 데이터를 여과제거시킴으로써 최종적인 시스템 신뢰도 가중를 얻으며 그 표현식은 하기 (2)와 같으며;
(2)
이로부터 선박 위치와 관련되는 최종의 매칭 위치 고정 데이터를 얻으며;
(3)
상기 N-1개의 GPS 신호 수신 모듈의 매칭 후의 좌표치에 근거하여 매칭 후의 선박 자세각 데이터를 계산해 내는 것을 특징으로 하는 선박 보조 도킹 방법. - 제2항 내지 제4항 중의 어느 한 항에 있어서,
상기 데이터 처리 모듈은 데이터 융합법을 사용하여 위치 고정 데이터 또는 자세각 데이터를 각각 통합시키고 상기 데이터 융합법은 구체적으로 다음 단계를 포함하며;
단계 1: 통합된 데이터가 위치 고정 데이터인 경우, 벡터로 N그룹의 검측 서브 시스템으로부터 반환된 N그룹의 경각도와 공간 변환 후의 위치 고정 데이터를 표시하며, 여기서, i=1, 2, 3,…,N이고; 상기 경각도와 공간 변환 후의 위치 고정 데이터를 획득하는 방법은 모든 솔라 블라인드 자외 영상화 모듈과 GPS 신호 수신 모듈의 상대적 위치와 선박 자세각을 이미 알고 있는 상황하에서 공간 위치 관계와 공간 기하 변환을 이용하여 상이한 측정 모듈에 대한 위치 측정 데이터를 동일한 측정 모듈에 대한 위치 측정 데이터로 전환시키는 것이고;
a) 각 검측 서브 시스템 측정 데이터가 실제로 계산해 낸 오차의 제곱 평균 제곱근 rmse를 사용하여 각각의 서브 시스템 반환 데이터의 신뢰도를 판정하고 각 서브 시스템 측정 데이터의 오차의 제곱 평균 제곱근을 계산하는 공식은 다음과 같으며;
(4)
여기서, rmse는 오차의 제곱 평균 제곱근(root mean square error)을 표시하고,는 i시각에서 각 측정 서브 시스템이 X축 좌표에서의 측정 데이터를 표시하며, 는 i시각에서
는 i시각에서 데이터에 대한 여파값을 표시하고, n은 측정 데이터의 총수, 즉 서브 시스템의 개수를 표시하며 i시각의 여파치는 칼만 필터 방법에 의해 획득하며;
데이터에 대한 여파값을 표시하고, n은 측정 데이터의 총수, 즉 서브 시스템의 개수를 표시하며 i시각의 여파치는 칼만 필터 방법에 의해 획득하며;
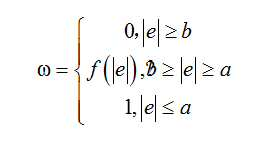
b) 분단법으로 무게값(weight)을 확정하고 곡선 맞춤을 통하여 무게값의 분배를 진행하며;
(5)
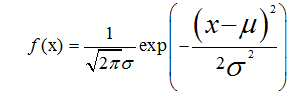
여기서, ω는 무게값이고, 파라미터 b는 outliers을 판단하는 최소한도이며, 파라미터 a는 유효 데이터와 이용할 수 있는 수치의 한계값이며, 오차가 b보다 클 때 outliers로 인정하고 대응되는 무게값은 0이며 오차가 a보다 작을 때 유효치로 인정하고, 대응되는 무게값은 1이며, 중간의 이용할 수 있는 값의 무게값은 곡선y=f(x)에 따라 제공되며, f(x)는 반드시 하기 조건을 충족해야 하며, a,b)구간에서 오차가 커짐에 따라 신속히 감소되며 f(x)가 사용하는 표현식은 다음과 같으며;
(6)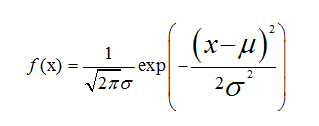
여기서, μ와 σ는 각각 가우스 분포의 평균치와 분산이며, 가우스 곡선이 x>μ의 영역에서 감소함수의 특성을 나타내므로 여기서 μ=0을 취하고 실제상 사용한 것은 하프 가우스 곡선이며 표현식은 추가적으로 하기로 변환되며;
(7)
3σ법칙에 의해 σ값을 제공하고 가우스 곡선을 통하여 무게값의 분배를 매칭시키는 방법은 하기 식에 의해 얻을 수 있으며;
(8)
또한,이고, 여기서 는 k시각에서 제i개 시스템의 오차의 제곱 평균 제곱근이고,는 k시각에서의 제i개 시스템의 무게값을 표시하며;
는 k시각에서 제i개 시스템의 오차의 제곱 평균 제곱근이고,는 k시각에서의 제i개 시스템의 무게값을 표시하며;
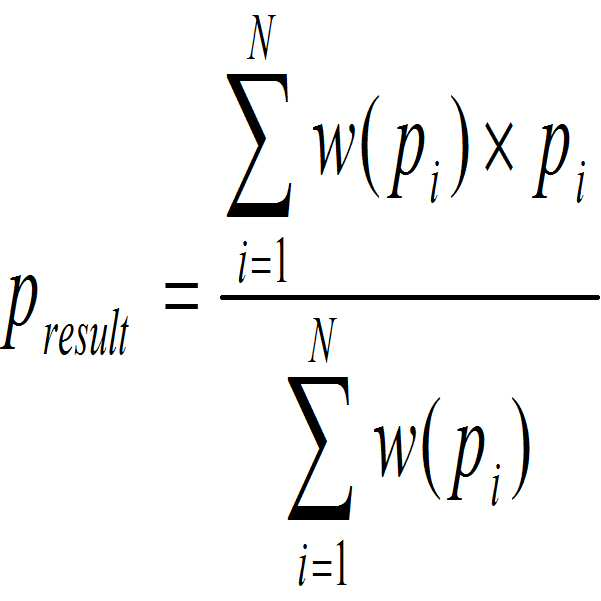
c) 최종 데이터의 융합 결과는 다음과 같으며;
(9)
여기서,는 k시각의 융합치이고, 는 각 서브 시스템이 k시각에서 얻은 측정 데이터를 표시하며;
는 각 서브 시스템이 k시각에서 얻은 측정 데이터를 표시하며;
d) 상기의 단계 a) 내지 단계 c)와 동일한 방법으로 Y축 좌표치 y 및 Z축 좌표치 z의 데이터 융합 최종 결과를 계산해 내며;
단계 2: 통합된 데이터가 자세각 데이터인 경우, 벡터로 N개의 측정 서브 시스템으로부터 반환된 N그룹의 자세각 데이터를 표시하고, 여기서 i=1, 2, 3,…,N이고, 다음에 단계 1과 동일한 방법을 사용하여 통합 후의 자세각 데이터를 계산해 내는 것을 특징으로 하는 선박 보조 도킹 방법.
- 제2항 내지 제4항 중의 어느 한 항에 있어서,
상기 데이터 처리 모듈은 데이터 융합법을 사용하여 각각 위치 고정 데이터 또는 자세각 데이터를 통합하는데 사용되며 상기 데이터 융합법은 구체적으로 다음 단계를 포함하며;
단계 1: 통합된 데이터가 위치 고정 데이터인 경우, 벡터로 N그룹의 검측 서브 시스템으로부터 반환된 N그룹의 경각도와 공간 변환 후의 위치 고정 데이터를 표시하며, 여기서, i=1, 2, 3,…,N; 상기 경각도와 공간 변환 후의 위치 고정 데이터를 획득하는 방법은 모든 솔라 블라인드 자외 영상화 모듈과 GPS 신호 수신 모듈의 상대적 위치와 선박 자세각을 이미 알고 있는 상황하에서 공간 위치 관계와 공간 기하 변환을 이용하여 상이한 측정 모듈에 대한 위치 측정 데이터를 동일한 측정 모듈에 대한 위치 측정 데이터로 전환시키는 것이고;
a) 위치 고정 데이터 중의 각 좌표 서열의 표준편차를 계산해 내고 N그룹의 검측 서브 시스템으로부터 반환된 N그룹의 위치 고정 데이터 중의 각 좌표 서열의 표준편차를 계산함으로써 N그룹 데이터 중 매 좌표 서열 중의 아웃라이어 데이터를 판정하는 의거로 하며 상기 좌표 서열의 표준편차는 다음과 같으며;
(10)
여기서, index∈(x,y,z)이면는 N그룹의 데이터 중 각 좌표 서열의 표준편차를 표시하고, 는 N그룹의 측정한 데이터를 표시하며, 매 그룹이 좌표치(x, y, z)를 포함하고,
는 N그룹의 측정한 데이터를 표시하며, 매 그룹이 좌표치(x, y, z)를 포함하고, 는 N그룹 데이터의 평균치를 표시하며, 즉 각 좌표 서열 평균치로 구성된 하나의 1차원 벡터이며;
는 N그룹 데이터의 평균치를 표시하며, 즉 각 좌표 서열 평균치로 구성된 하나의 1차원 벡터이며;
b) 계산해 낸 표준편차에 의해 매 좌표 서열 중의 아웃라이어 데이터를 획득하고 아웃라이어 데이터의 판정은 하기 식에 의해 획득할 수 있고;
(11)
여기서, outliters는 획득한 아웃라이어 데이터를 표시하고, x, y 및 z로 구성된 한 그룹의 좌표 데이터에서 그 중의 하나의 좌표치가 그가 위치한 서열 중에서 아웃라이어 데이터로 판정되면 해당 그룹의 좌표치는 N그룹의 좌표 데이터 중의 아웃라이어 데이터로 판정되며, c는 constant coefficient이고 실험 경험과 필요에 따라 정해지며 해당 상수를 하기와 같은 확정 방법에 따라 확정할 수 있으며, 즉 대량의 테스트를 통하여 테스트값의 파동 범위를 판단하고 테스트값의 평균치를 중심으로 하는 하나의 대칭 범위를 취하여 대량적으로 나타난 불합리한 포인트를 해당 범위 밖에 존재하도록 하며 해당 범위 길이의 절반이 바로 C이고;
c) 아웃라이어 데이터를 N그룹의 원시 측정 데이터로부터 제거하면 새로운 위치 고정 데이터 서열을 얻게 되며, 이를로 칭하며, 차원수는 이고, 다음으로
이고, 다음으로 에 대해 동일 평균을 진행하고, 데이터 융합을 거쳐 다음과 같은 최종의 융합 데이터를 얻으며;
에 대해 동일 평균을 진행하고, 데이터 융합을 거쳐 다음과 같은 최종의 융합 데이터를 얻으며;
(12)
여기서,는 데이터 융합 후의 최종의 위치 고정 데이터이고;
d) 상기의 단계 a) 내지 단계 c)와 동일한 방법으로 Y축 좌표치 y 및 Z축 좌표치 z의 데이터 융합 최종 결과를 계산해 내며;
단계 2: 통합된 데이터가 자세각 데이터인 경우, 벡터로 N개의 측정 서브 시스템으로부터 반환된 N그룹의 자세각 데이터를 표시하고, 여기서 i=1, 2, 3,…,N이고, 다음에 단계 1과 동일한 방법을 사용하여 통합 후의 자세각 데이터를 계산해 내는 것을 특징으로 하는 선박 보조 도킹 방법.
- 제1항 내지 제4항 중의 어느 한 항에 있어서,
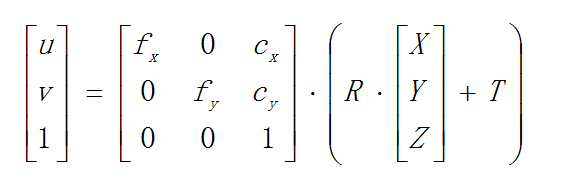
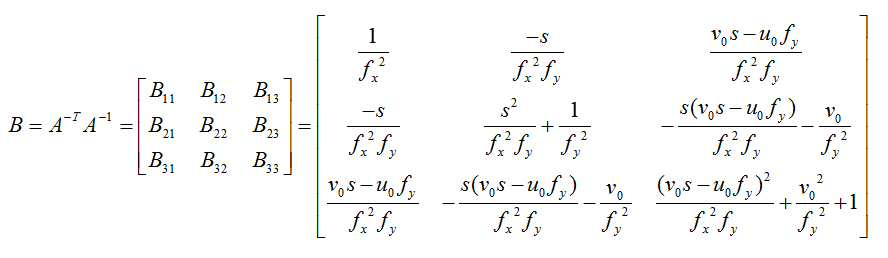
측정하기 전에 먼저 솔라 블라인드 자외 영상화 모듈을 표준화(standardization)시키고 상기 솔라 블라인드 자외 영상화 모듈의 측정과 관련되는 광전자 파라미터를 확정하는 것을 특징으로 하는 선박 보조 도킹 방법. - 제9항에 있어서,
상기 솔라 블라인드 자외 영상화 모듈의 측정과 관련되는 광전자 파라미터는 x축과 y축 방향에서 화소를 단위로 하는 초점거리, 상평면 위의 기준점 위치 및 x축과 y축 방향에서의 반경 방향 왜율
및 x축과 y축 방향에서의 반경 방향 왜율 를 포함하는 것을 특징으로 하는 선박 보조 도킹 방법.
를 포함하는 것을 특징으로 하는 선박 보조 도킹 방법.
- 제1항 내지 제4항 중의 어느 한 항에 있어서,
선박의 동력 제어 시스템은 데이터 처리 모듈로부터 전송한 상기 솔라 블라인드 자외 광원 어레이의 도킹 거리 신호를 수신하고 이에 근거하여 선박의 자세를 조정하여 도킹하는 것을 특징으로 하는 선박 보조 도킹 방법. - 선박에 설치되고 수신한 물가에 기설정된 솔라 블라인드 자외 광원 어레이의 솔라 블라인드 자외광 신호에 의해 상기 선박과 관련되는 정박 위치와의 위치 관계 정보를 측정하는 하나의 솔라 블라인드 자외 영상화 모듈; 및 상기 솔라 블라인드 자외 영상화 모듈과 전기적으로 연결되고 상기 솔라 블라인드 자외 영상화 모듈의 수신 데이터를 처리하여 상기 선박의 좌표를 획득하는 하나의 데이터 처리 모듈을 포함하는 선박 보조 도킹 시스템에 있어서,
적어도 2개의 GPS 신호 수신 모듈을 더 포함하고, 그 중의 적어도 하나의 GPS 신호 수신 모듈은 상기 선박에 장착되며 각 GPS 신호 수신 모듈은 관련되는 위성으로부터 위치 고정 신호를 수신하는 위성 신호 수신 부분 및 상기 수신된 위성 신호를 상기 데이터 처리 모듈까지 전송시키는 신호 전송 부분을 포함하며, 상기 데이터 처리 모듈과 상기 GPS 신호 수신 모듈은 전기적으로 연결되고 GPS 신호 수신 모듈이 관련되는 위성으로부터 수신한 위치 고정 데이터를 처리하고, 이에 근거하여 상기 선박의 자세각을 확정하는
것을 특징으로 하는 선박 보조 도킹 시스템. - 제12항에 있어서,
상기 선박에 장착된 GPS 신호 수신 모듈과 물가에 설치된 GPS 신호 수신 모듈이 협동 작업하여 GPS 차동 시스템을 구성하고 여기서 물가에 있는 GPS 신호 수신 모듈은 GPS 모국으로 작용하고 선박상의 GPS 신호 수신 모듈은 GPS 종국으로 작용하며, 상기 GPS 종국은 관련되는 위성으로부터 자신의 위치 데이터를 수신하고 상기 GPS 모국으로부터 상기 GPS 모국의 위치 데이터 및 GPS 종국 위치 데이터의 정밀도를 증진하는데 유리한 기타의 데이터를 수신하고 이 데이터들에 대헤 처리하거나 이 데이터들을 상기 데이터 처리 모듈에 발송하여 처리를 진행하여 상기 선박의 위치와 자세각 데이터를 획득하는 것을 특징으로 하는 선박 보조 도킹 시스템. - 제13항에 있어서,
모든 GPS신호 수신 모듈은 모두 상기 선박에 장착되는 것을 특징으로 하는 선박 보조 도킹 시스템. - 제14항에 있어서,
상기 데이터 처리 모듈은 표준화 자기상관 알고리즘을 사용하여 상기 솔라 블라인드 자외 영상화 모듈 및 GPS 신호 수신 모듈에 의해 얻은 좌표치에 대해 통합처리하고, x, y 및 z로 솔라 블라인드 자외 영상화 모듈 및 두 개의 GPS 신호 수신 모듈이 위치한 위치의 3축 좌표를 각각 표시하고, 벡터로 N그룹의 검측 서브 시스템으로부터 반환된 N그룹의 경각도와 공간 변환 후의 위치 고정 데이터 중의 제i그룹의 위치 고정 데이터를 표시하며, 여기서, i=1, 2, 3,…,N; N=GPS 신호 수신 모듈의 개수+1이고; 상기 경각도와 공간 변환 후의 위치 고정 데이터를 획득하는 방법은 모든 솔라 블라인드 자외 영상화 모듈과 GPS 신호 수신 모듈의 상대적 위치와 선박 자세각을 이미 알고 있는 상황하에서 공간 위치 관계와 공간 기하 변환을 이용하여 상이한 측정 모듈에 대한 위치 측정 데이터를 동일한 측정 모듈에 대한 위치 측정 데이터로 전환시키는 것이고; 데이터 처리 모듈이 표준화 자기상관 처리를 진행함에 있어서 구체적인 단계는 다음과 같으며;
표준화 상관계수 NCC를 사용하여 N그룹의 검측 서브 시스템이 위치 고정 데이터를 반환하는 신뢰도를 표시하고,
(13)
j=1, 2, 3,…,N;
하나의 모든 솔라 블라인드 자외 영상화 모듈과 GPS 신호 수신 모듈로 구성된 검측 시스템의 신뢰도 평균치의 역치 G를 설정하고 해당 역치 G에 의해 NCC가 비교적 낮은 위치 고정 데이터를 여과제거시킴으로써 최종적인 시스템 신뢰도 가중를 얻으며 그 표현식은 하기 (14)와 같으며;
(14)
이로부터 선박 위치와 관련되는 최종의 매칭 위치 고정 데이터를 얻으며;
(15)
상기 N-1개의 GPS 신호 수신 모듈의 매칭 후의 좌표치에 근거하여 매칭 후의 선박 자세각 데이터를 계산해 내는 것을 특징으로 하는 선박 보조 도킹 시스템. - 제14항에 있어서,
상기 데이터 처리 모듈은 데이터 융합법을 사용하여 상기 GPS 신호 수신 모듈이 수신된 좌표 데이터에 대해 통합처리를 진행하거나 또는 상기 GPS 신호 수신 모듈이 측정한 좌표 데이터와 상기 솔라 블라인드 자외 영상화 모듈이 측정한 좌표 데이터에 대해 통합처리를 진행하거나 또는 상기 GPS 신호 수신 모듈이 수신한 자세각 데이터에 대해 통합처리를 진행하고 상기 데이터 융합법은 구체적으로 다음 단계를 포함하며;
단계 1: 통합된 데이터가 위치 고정 데이터인 경우, 벡터로 N그룹의 검측 서브 시스템으로부터 반환된 N그룹의 경각도와 공간 변환 후의 위치 고정 데이터를 표시하며, 여기서, i=1, 2, 3,…,N이고; 상기 경각도와 공간 변환 후의 위치 고정 데이터를 획득하는 방법은 모든 솔라 블라인드 자외 영상화 모듈과 GPS 신호 수신 모듈의 상대적 위치와 선박 자세각을 이미 알고 있는 상황하에서 공간 위치 관계와 공간 기하 변환을 이용하여 상이한 측정 모듈에 대한 위치 측정 데이터를 동일한 측정 모듈에 대한 위치 측정 데이터로 전환시키는 것이고;
a) 각 검측 서브 시스템 측정 데이터가 실제로 계산해 낸 오차의 제곱 평균 제곱근rmse를 사용하여 각각의 서브 시스템 반환 데이터의 신뢰도를 판정하고 각 서브 시스템 측정 데이터의 오차의 제곱 평균 제곱근을 계산하는 공식은 다음과 같으며;
(16)
여기서, rmse는 오차의 제곱 평균 제곱근(root mean square error)을 표시하고,는 i시각에서 각 측정 서브 시스템이 X축 좌표에서의 측정 데이터를 표시하며, 는 i시각에서
는 i시각에서 데이터에 대한 여파값을 표시하고, n은 측정 데이터의 총수, 즉 서브 시스템의 개수를 표시하며 i시각의 여파치는 칼만 필터 방법에 의해 획득하며;
데이터에 대한 여파값을 표시하고, n은 측정 데이터의 총수, 즉 서브 시스템의 개수를 표시하며 i시각의 여파치는 칼만 필터 방법에 의해 획득하며;
b) 분단법으로 무게값(weight)을 확정하고 곡선 맞춤을 통하여 무게값의 분배를 진행하며;
(17)
여기서, ω는 무게값이고, 파라미터 b는 outliers을 판단하는 최소한도이며, 파라미터 a는 유효 데이터와 이용할 수 있는 수치의 한계값이며, 오차가 b보다 클 때 outliers로 인정하고 대응되는 무게값은 0이며, 오차가 a보다 작을 때 유효치로 인정하고, 대응되는 무게값은 1이며, 중간의 이용할 수 있는 값의 무게값은 곡선 y=f(x)에 따라 제공되며, f(x)는 반드시 하기 조건을 충족해야 하며, (a, b) 구간에서 오차가 커짐에 따라 신속히 감소되며, f(x)가 사용하는 표현식은 다음과 같으며;
(18)
여기서, μ와 σ는 각각 가우스 분포의 평균치와 분산이며, 가우스 곡선이 x>μ의 영역에서 감소함수의 특성을 나타내므로 여기서 μ=0을 취하고 실제상 사용한 것은 하프 가우스 곡선이며 표현식은 추가적으로 하기로 변환되며;
(19)
3σ법칙에 의해 σ값을 제공하고 가우스 곡선을 통하여 무게값의 분배를 매칭시키는 방법은 하기 식에 의해 얻을 수 있으며;
(20)
또한,이고, 여기서 는 k시각에서 제i개 시스템의 오차의 제곱 평균 제곱근이고,
는 k시각에서 제i개 시스템의 오차의 제곱 평균 제곱근이고, 는 k시각에서의 제i개 시스템의 무게값을 표시하며;
는 k시각에서의 제i개 시스템의 무게값을 표시하며;
c)최종 데이터의 융합 결과는 다음과 같으며;
(21)
여기서,는 k시각의 융합치이고, 는 각 서브 시스템이 k시각에서 얻은 측정 데이터를 표시하며;
는 각 서브 시스템이 k시각에서 얻은 측정 데이터를 표시하며;
d)상기의 단계 a) 내지 단계 c)와 동일한 방법으로 Y축 좌표치 y 및 Z축 좌표치 z의 데이터 융합 최종 결과를 계산해 내며;
단계 2: 통합된 데이터가 자세각 데이터인 경우, 벡터로 N개의 측정 서브 시스템으로부터 반환된 N그룹의 자세각 데이터를 표시하고, 여기서 i=1, 2, 3,…,N이고, 다음에 단계 1과 동일한 방법을 사용하여 통합 후의 자세각 데이터를 계산해 내는 것을 특징으로 하는 선박 보조 도킹 시스템.
- 제13항 내지 제16항 중의 어느 한 항에 있어서,
상기 선박의 동력 제어 시스템은 데이터 처리 모듈로부터 전송한 상기 솔라 블라인드 자외 광원 어레이의 도킹 거리 신호를 수신하고 이에 근거하여 선박의 자세를 조정하여 도킹하는 것을 특징으로 하는 선박 보조 도킹 시스템.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201510020599.X | 2015-01-15 | ||
| CN201510020599.XA CN105842724B (zh) | 2015-01-15 | 2015-01-15 | 一种船舶辅助泊岸方法和系统 |
| PCT/CN2015/090136 WO2016112708A1 (zh) | 2015-01-15 | 2015-09-21 | 一种船舶辅助泊岸方法和系统 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20170102992A true KR20170102992A (ko) | 2017-09-12 |
| KR102049371B1 KR102049371B1 (ko) | 2020-01-22 |
Family
ID=56405209
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020177022392A Active KR102049371B1 (ko) | 2015-01-15 | 2015-09-21 | 선박 보조 도킹 방법과 시스템 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US10424205B2 (ko) |
| JP (1) | JP6516111B2 (ko) |
| KR (1) | KR102049371B1 (ko) |
| CN (1) | CN105842724B (ko) |
| DE (1) | DE112015005971T5 (ko) |
| WO (1) | WO2016112708A1 (ko) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN119882787A (zh) * | 2024-11-25 | 2025-04-25 | 宜昌测试技术研究所 | 一种水下航行体回坞导引控制方法 |
Families Citing this family (44)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9778657B2 (en) | 2010-11-19 | 2017-10-03 | Bradley Tyers | Automatic location placement system |
| WO2018098729A1 (zh) * | 2016-11-30 | 2018-06-07 | 深圳益强信息科技有限公司 | 一种日盲紫外引航的方法及装置 |
| WO2018100747A1 (ja) * | 2016-12-02 | 2018-06-07 | ヤマハ発動機株式会社 | 小型船舶 |
| WO2018100746A1 (ja) * | 2016-12-02 | 2018-06-07 | ヤマハ発動機株式会社 | 小型船舶及びその制御方法 |
| CN107656524A (zh) * | 2017-09-26 | 2018-02-02 | 镇江市鹏申电子科技有限公司 | 一种船用航向纠偏系统 |
| WO2019152312A1 (en) | 2018-01-31 | 2019-08-08 | Walmart Apollo, Llc | A system and method for autonomous decision making, corrective action, and navigation in a dynamically changing world |
| CN108802666A (zh) * | 2018-04-20 | 2018-11-13 | 中蕊(武汉)光电科技有限公司 | 一种紫外搜救设备 |
| CN108986433B (zh) * | 2018-08-09 | 2020-06-02 | 厦门硅田系统工程有限公司 | 一种船舶倾覆的告警方法 |
| CN109186605B (zh) * | 2018-09-01 | 2022-03-18 | 哈尔滨工程大学 | 一种基于uwb室内定位的无人艇船载测速测向方法 |
| CN109961210B (zh) * | 2018-09-30 | 2022-11-25 | 大连永航科技有限公司 | 一种具有语音引导的游艇调度系统 |
| CN109626004B (zh) * | 2018-12-04 | 2023-11-21 | 中交第四航务工程勘察设计院有限公司 | 一种三边岸线的集装箱码头和装卸系统及其工作方法 |
| CN109917370A (zh) * | 2019-02-26 | 2019-06-21 | 西安理工大学 | 无线紫外光隐秘通信中船舰甲板人员间定位方法 |
| CN110058285B (zh) * | 2019-05-03 | 2022-09-27 | 苏州神海港航数据服务有限公司 | 基于多定位传感器的高精度船舶轮廓构建系统 |
| CN110456793B (zh) * | 2019-08-08 | 2022-04-29 | 四方智能(武汉)控制技术有限公司 | 一种无人艇自主停泊方法、装置及无人艇 |
| CN110942475B (zh) * | 2019-11-13 | 2023-02-17 | 北方夜视技术股份有限公司 | 紫外与可见光图像融合系统及快速图像配准方法 |
| CN111179638B (zh) * | 2020-01-08 | 2022-03-11 | 中国船舶重工集团公司第七二四研究所 | 一种基于时间序列的船舶ais目标航行监控方法 |
| CN111353222B (zh) * | 2020-02-25 | 2023-05-02 | 智慧航海(青岛)科技有限公司 | 一种智能船舶自动靠泊能力的仿真测试系统及方法 |
| CN111323804B (zh) * | 2020-04-22 | 2023-08-29 | 北京国泰星云科技有限公司 | 一种基于北斗系统的船舶姿态测量设备及测量方法 |
| CN111984006B (zh) * | 2020-07-24 | 2021-07-06 | 哈尔滨工程大学 | 融合海流及尺度差异影响的无人艇多目标会遇避碰方法 |
| EP4201800B1 (en) | 2020-08-24 | 2026-01-28 | Furuno Electric Co., Ltd. | Watercraft navigation assistance device, watercraft navigation assistance method, and watercraft navigation assistance program |
| CN114527426B (zh) * | 2020-11-06 | 2024-11-15 | 陕西润丰鑫达科技有限公司 | 一种基于紫外光信标的应急定位系统及定位方法 |
| CN112634657B (zh) * | 2020-12-29 | 2022-11-25 | 中船重工(浙江自贸区)海洋科学研究院有限公司 | 一种全天时全天候码头船舶靠泊监测系统 |
| CN112820149A (zh) * | 2020-12-31 | 2021-05-18 | 天津中海油能源发展油田设施管理有限公司 | 三用工作船智能辅助靠泊系统 |
| CN112859133B (zh) * | 2021-01-20 | 2022-06-14 | 中船重工鹏力(南京)大气海洋信息系统有限公司 | 一种基于雷达与北斗数据的船舶深度融合定位方法 |
| CN113325447B (zh) * | 2021-06-04 | 2023-07-28 | 华北电力大学 | 通过北斗gps信号测算时标的时间同一准对方法和装置 |
| CN113484892B (zh) * | 2021-06-30 | 2023-06-20 | 中国船舶重工集团公司第七一九研究所 | 一种基于gnss的船体姿态计算方法及系统 |
| CN113959447B (zh) * | 2021-10-19 | 2023-06-27 | 北京京航计算通讯研究所 | 相对导航高噪声量测量识别方法、装置、设备和存储介质 |
| CN113993069B (zh) * | 2021-10-28 | 2023-06-23 | 华清科盛(北京)信息技术有限公司 | 一种室内定位方法及装置、电子设备 |
| CN114166137B (zh) * | 2021-11-26 | 2024-09-10 | 沪东中华造船(集团)有限公司 | 一种船对船加注间距智能检测系统及方法 |
| TWI801025B (zh) * | 2021-12-08 | 2023-05-01 | 財團法人船舶暨海洋產業研發中心 | 船舶自動靠泊影像測距系統及其運作方法 |
| CN113947968B (zh) * | 2021-12-20 | 2022-03-04 | 江苏普旭科技股份有限公司 | 滑轨式双运动平台对接模拟仿真系统与方法 |
| CN114319083B (zh) * | 2022-01-27 | 2023-04-18 | 武汉理工大学 | 一种桥梁防撞装置及方法 |
| CN114501364B (zh) * | 2022-02-22 | 2023-12-22 | 成都市联洲国际技术有限公司 | 基于wifi信号的室内定位方法、装置以及电子设备 |
| US12210103B2 (en) | 2022-03-21 | 2025-01-28 | Samsung Electronics Co., Ltd. | Spurious space vehicle detection via exploiting knowledge of known bits |
| CN115575970A (zh) * | 2022-09-30 | 2023-01-06 | 中国科学院半导体研究所 | 日盲紫外测距系统及方法 |
| CN115713449A (zh) * | 2022-10-27 | 2023-02-24 | 武汉理工大学 | 一种面向海事监管的多源信息融合辅助监管方法和系统 |
| CN115571290B (zh) * | 2022-11-09 | 2023-06-13 | 传仁信息科技(南京)有限公司 | 一种船舶吃水自动检测系统及其方法 |
| CN116699985A (zh) * | 2023-05-29 | 2023-09-05 | 杭州电子科技大学 | 一种适用于极地高纬度的auv多传感器组合回坞导引方法 |
| CN120048150B (zh) * | 2023-10-25 | 2025-11-18 | 杭州目博科技有限公司 | 基于视频巡检设备自动定位泊位系统的路侧停车收费方法 |
| CN118897868B (zh) * | 2024-06-26 | 2025-07-15 | 交通运输部水运科学研究所 | 一种基于鸿蒙操作系统的电子航道图处理方法及系统 |
| CN119399433B (zh) * | 2024-10-16 | 2026-03-20 | 四川德尔博睿科技股份有限公司 | 一种使用摄像头自动进行船舶识别追踪的方法 |
| CN119687871B (zh) * | 2024-12-02 | 2025-12-02 | 北京市政建设集团有限责任公司 | 一种基于遥感影像的矢量地理信息采集方法及系统 |
| CN120160607B (zh) * | 2025-02-18 | 2026-04-17 | 中远海运特种运输股份有限公司 | 一种融合局部定位及全局定位的海上平台定位方法及装置 |
| CN120544424B (zh) * | 2025-07-29 | 2025-10-03 | 苏交科集团股份有限公司 | 一种锚地停泊区管控调度方法及系统 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004012311A (ja) * | 2002-06-07 | 2004-01-15 | Mitsubishi Electric Corp | 移動体の情報端末 |
| CN103177606A (zh) * | 2012-12-18 | 2013-06-26 | 江苏五维电子科技有限公司 | 基于日盲紫外光信号的引航靠泊系统 |
| JP2014065495A (ja) * | 2013-12-03 | 2014-04-17 | Yanmar Co Ltd | 船舶の着岸支援装置 |
Family Cites Families (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE69309378T2 (de) * | 1992-09-21 | 1997-09-18 | Honeywell Inc | Verfahren und Einrichtung zur Bestimmung der Lage eines Raumfahrzeuges in drei Achsen |
| US5837894A (en) * | 1995-02-09 | 1998-11-17 | Honeywell Inc. | Wide field of view sensor with diffractive optic corrector |
| JPH10115522A (ja) * | 1996-10-15 | 1998-05-06 | Kajima Corp | 函体等の誘導据付け方法 |
| US6631323B2 (en) * | 2000-05-30 | 2003-10-07 | Northrop Grumman Corporation | Method and apparatus for improving performance of an inertial navigation system having global positioning system corrections |
| US6424914B1 (en) * | 2000-12-26 | 2002-07-23 | American Gnc Corporation | Fully-coupled vehicle positioning method and system thereof |
| US6632323B2 (en) * | 2001-01-31 | 2003-10-14 | Plasmion Corporation | Method and apparatus having pin electrode for surface treatment using capillary discharge plasma |
| US6473030B1 (en) * | 2001-02-28 | 2002-10-29 | Seiko Epson Corporation | Infrastructure-aiding for satellite navigation receiver and method |
| JP3922278B2 (ja) * | 2004-09-10 | 2007-05-30 | コニカミノルタフォトイメージング株式会社 | 振れ補正機構付きカメラ |
| US20060078891A1 (en) * | 2004-10-08 | 2006-04-13 | Ach Robert A | Nucleic acid arrays comprising a set of hybridization parameter determination features and methods for using the same |
| US7876927B2 (en) * | 2005-01-04 | 2011-01-25 | Deere & Company | Method and system for guiding a vehicle with vision-based adjustment |
| CN201170800Y (zh) * | 2008-02-29 | 2008-12-24 | 江苏科技大学 | 船舶航迹测量与分析装置 |
| US8423278B2 (en) * | 2008-11-19 | 2013-04-16 | Furuno Electric Company Limited | Navigation aid method, device and program |
| US9623884B2 (en) * | 2009-11-13 | 2017-04-18 | General Electric Company | Method and system for independent control of vehicle |
| CN102192736B (zh) * | 2010-03-03 | 2016-02-10 | 中国船舶重工集团公司第七0七研究所 | 船舶综合控制系统传感器输出数据的优化处理方法 |
| US8315788B2 (en) * | 2010-05-19 | 2012-11-20 | Ford Global Technologies, Llc | Method and system for vehicle refueling |
| KR101268291B1 (ko) * | 2010-09-03 | 2013-05-28 | 한국과학기술원 | 동료 지원을 통한 초고속 gnss 초기 위치 획득 장치, 방법 및 그 기록매체 |
| JP5834810B2 (ja) * | 2011-11-17 | 2015-12-24 | 株式会社リコー | カメラキャリブレーション装置、乗員支援装置、カメラキャリブレーション用歪み係数生成方法 |
| EP2827382B1 (en) * | 2012-05-28 | 2019-04-17 | Panasonic Intellectual Property Management Co., Ltd. | Solar cell and method for manufacturing same |
| CN103175523B (zh) * | 2012-12-18 | 2015-08-12 | 江苏南大五维电子科技有限公司 | 基于日盲紫外光信号的引航仪 |
| CN203070552U (zh) * | 2012-12-18 | 2013-07-17 | 集美大学 | 一种大型船舶靠泊系统 |
| US20160018339A1 (en) * | 2013-04-02 | 2016-01-21 | Halliburton Energy Services, Inc. | Autonomous remote sensor for determining a property of a fluid in a body of water |
| CN103398710B (zh) * | 2013-08-06 | 2015-11-25 | 大连海事大学 | 一种夜雾天况下的舰船进出港导航系统及其构建方法 |
| JP6345919B2 (ja) * | 2013-08-27 | 2018-06-20 | オリンパス株式会社 | 撮影装置およびカメラシステム |
| CN105004972B (zh) * | 2015-06-25 | 2017-11-28 | 华北电力大学(保定) | 基于日盲紫外成像图像特征的瓷绝缘子绝缘状态评估方法 |
-
2015
- 2015-01-15 CN CN201510020599.XA patent/CN105842724B/zh active Active
- 2015-09-21 KR KR1020177022392A patent/KR102049371B1/ko active Active
- 2015-09-21 JP JP2017537415A patent/JP6516111B2/ja not_active Expired - Fee Related
- 2015-09-21 US US15/543,916 patent/US10424205B2/en active Active
- 2015-09-21 WO PCT/CN2015/090136 patent/WO2016112708A1/zh not_active Ceased
- 2015-09-21 DE DE112015005971.7T patent/DE112015005971T5/de not_active Withdrawn
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004012311A (ja) * | 2002-06-07 | 2004-01-15 | Mitsubishi Electric Corp | 移動体の情報端末 |
| CN103177606A (zh) * | 2012-12-18 | 2013-06-26 | 江苏五维电子科技有限公司 | 基于日盲紫外光信号的引航靠泊系统 |
| JP2014065495A (ja) * | 2013-12-03 | 2014-04-17 | Yanmar Co Ltd | 船舶の着岸支援装置 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN119882787A (zh) * | 2024-11-25 | 2025-04-25 | 宜昌测试技术研究所 | 一种水下航行体回坞导引控制方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN105842724B (zh) | 2018-07-17 |
| WO2016112708A1 (zh) | 2016-07-21 |
| CN105842724A (zh) | 2016-08-10 |
| JP6516111B2 (ja) | 2019-05-22 |
| KR102049371B1 (ko) | 2020-01-22 |
| JP2018503915A (ja) | 2018-02-08 |
| DE112015005971T5 (de) | 2017-12-14 |
| US10424205B2 (en) | 2019-09-24 |
| US20180012498A1 (en) | 2018-01-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102049371B1 (ko) | 선박 보조 도킹 방법과 시스템 | |
| KR101992731B1 (ko) | 선박 보조 도킹 방법과 시스템 | |
| US20240385333A1 (en) | Vehicle navigation combining transmitted object location information and sensor-based relative object location information | |
| JP5724907B2 (ja) | 船舶の統合監視のための衛星情報及び船舶情報の統合方法 | |
| KR102690410B1 (ko) | 해상관측 합성개구레이더 영상의 기하보정 방법 및 그 장치 | |
| CN110889380B (zh) | 一种舰船识别方法、装置及计算机存储介质 | |
| CN115308762B (zh) | 基于激光雷达和ais的船舶识别方法及装置 | |
| JP6567665B2 (ja) | 船舶の航路(パス)の全地点における各々のドリフト(浮動)ベクトルを推定する方法 | |
| CN118859955A (zh) | 一种桥梁防撞系统中船舶轨迹的监控方法及系统 | |
| CN105547282A (zh) | 一种用于移动定位目标的方法及测量设备 | |
| KR100976965B1 (ko) | 네비게이션 장치 및 이의 위치 결정 방법 | |
| KR102283968B1 (ko) | 이미지 학습 기반 시정 관측 정보 생성 및 공유 시스템과 그 방법 | |
| RU2601387C1 (ru) | Способ определения положения аврорального овала и состояния магнитного поля земли | |
| CN119437228A (zh) | 船舶导航系统 | |
| Cheng et al. | On the use of Vision for the Weighting of GNSS observation: comparisons | |
| WO2015194966A1 (en) | Method and system for quality control and correction of position data from navigation satellites in areas with obstructing objects | |
| CN121399429A (zh) | 自动靠岸装置、自动靠岸系统、自动靠岸方法及自动靠岸程序 | |
| CN114500719B (zh) | 一种带天体定位功能的手机及天体定位方法 | |
| Yousif et al. | Accuracy enhancement of terrestrial mobile lidar data using theory of assimilation | |
| RU2825859C1 (ru) | Бортовой автоматизированный информационно-измерительный комплекс для оперативного сбора и обработки локальной информации об обстановке в районе местонахождения судна (бик ло) | |
| JPH10115522A (ja) | 函体等の誘導据付け方法 | |
| Wang et al. | Modeling and error analysis of ship berthing parameters | |
| RU2392174C1 (ru) | Оптическая система ориентирования судов | |
| WO2011136676A1 (ru) | Оптическая система ориентирования судов | |
| CN120932501A (zh) | 一种基于地理围栏的船舶航行预警方法和系统 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| PA0105 | International application |
Patent event date: 20170810 Patent event code: PA01051R01D Comment text: International Patent Application |
|
| PA0201 | Request for examination | ||
| PG1501 | Laying open of application | ||
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20181120 Patent event code: PE09021S01D |
|
| E90F | Notification of reason for final refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Final Notice of Reason for Refusal Patent event date: 20190530 Patent event code: PE09021S02D |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
Patent event code: PE07011S01D Comment text: Decision to Grant Registration Patent event date: 20191111 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
Comment text: Registration of Establishment Patent event date: 20191121 Patent event code: PR07011E01D |
|
| PR1002 | Payment of registration fee |
Payment date: 20191121 End annual number: 3 Start annual number: 1 |
|
| PG1601 | Publication of registration | ||
| PR1001 | Payment of annual fee |
Payment date: 20220818 Start annual number: 4 End annual number: 6 |