KR20170104267A - 개인 이동수단용 능동안전 시스템 - Google Patents
개인 이동수단용 능동안전 시스템 Download PDFInfo
- Publication number
- KR20170104267A KR20170104267A KR1020160027086A KR20160027086A KR20170104267A KR 20170104267 A KR20170104267 A KR 20170104267A KR 1020160027086 A KR1020160027086 A KR 1020160027086A KR 20160027086 A KR20160027086 A KR 20160027086A KR 20170104267 A KR20170104267 A KR 20170104267A
- Authority
- KR
- South Korea
- Prior art keywords
- unit
- control
- moving means
- steering
- sensor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/09—Taking automatic action to avoid collision, e.g. braking and steering
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61G—TRANSPORT, PERSONAL CONVEYANCES, OR ACCOMMODATION SPECIALLY ADAPTED FOR PATIENTS OR DISABLED PERSONS; OPERATING TABLES OR CHAIRS; CHAIRS FOR DENTISTRY; FUNERAL DEVICES
- A61G5/00—Chairs or personal conveyances specially adapted for patients or disabled persons, e.g. wheelchairs
- A61G5/04—Chairs or personal conveyances specially adapted for patients or disabled persons, e.g. wheelchairs motor-driven
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61G—TRANSPORT, PERSONAL CONVEYANCES, OR ACCOMMODATION SPECIALLY ADAPTED FOR PATIENTS OR DISABLED PERSONS; OPERATING TABLES OR CHAIRS; CHAIRS FOR DENTISTRY; FUNERAL DEVICES
- A61G5/00—Chairs or personal conveyances specially adapted for patients or disabled persons, e.g. wheelchairs
- A61G5/10—Parts, details or accessories
- A61G5/1005—Wheelchairs having brakes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/18—Conjoint control of vehicle sub-units of different type or different function including control of braking systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/20—Conjoint control of vehicle sub-units of different type or different function including control of steering systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/02—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to ambient conditions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62K—CYCLES; CYCLE FRAMES; CYCLE STEERING DEVICES; RIDER-OPERATED TERMINAL CONTROLS SPECIALLY ADAPTED FOR CYCLES; CYCLE AXLE SUSPENSIONS; CYCLE SIDECARS, FORECARS, OR THE LIKE
- B62K11/00—Motorcycles, engine-assisted cycles or motor scooters with one or two wheels
- B62K11/14—Handlebar constructions, or arrangements of controls thereon, specially adapted thereto
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61G—TRANSPORT, PERSONAL CONVEYANCES, OR ACCOMMODATION SPECIALLY ADAPTED FOR PATIENTS OR DISABLED PERSONS; OPERATING TABLES OR CHAIRS; CHAIRS FOR DENTISTRY; FUNERAL DEVICES
- A61G2203/00—General characteristics of devices
- A61G2203/10—General characteristics of devices characterised by specific control means, e.g. for adjustment or steering
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2420/00—Indexing codes relating to the type of sensors based on the principle of their operation
- B60W2420/40—Photo, light or radio wave sensitive means, e.g. infrared sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2420/00—Indexing codes relating to the type of sensors based on the principle of their operation
- B60W2420/54—Audio sensitive means, e.g. ultrasound
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62K—CYCLES; CYCLE FRAMES; CYCLE STEERING DEVICES; RIDER-OPERATED TERMINAL CONTROLS SPECIALLY ADAPTED FOR CYCLES; CYCLE AXLE SUSPENSIONS; CYCLE SIDECARS, FORECARS, OR THE LIKE
- B62K2202/00—Motorised scooters
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Transportation (AREA)
- Public Health (AREA)
- Chemical & Material Sciences (AREA)
- Veterinary Medicine (AREA)
- General Health & Medical Sciences (AREA)
- Automation & Control Theory (AREA)
- Animal Behavior & Ethology (AREA)
- Life Sciences & Earth Sciences (AREA)
- Health & Medical Sciences (AREA)
- Combustion & Propulsion (AREA)
- Physics & Mathematics (AREA)
- Mathematical Physics (AREA)
- Traffic Control Systems (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
- Regulating Braking Force (AREA)
Abstract
Description
도 2는 도 1의 능동 안전시스템이 적용된 개인 이동수단의 예를 도시한 모식도이다.
도 3은 도 1의 능동 안전시스템의 주행 환경 판단부의 주행환경 판단에 따른 구동 제어부의 제어 상태를 도시한 흐름도이다.
도 4는 도 1의 능동 안전시스템의 제동제어부의 제동 제어 상태를 도시한 모식도이다.
도 5는 도 1의 능동 안전시스템의 조향제어부의 조향 제어 상태를 도시한 모식도이다.
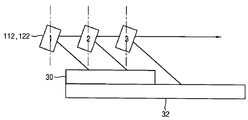
도 6a 및 도 6b는 도 1의 능동 안전시스템의 IR 센서의 센싱 상태를 도시한 모식도들이다.
110 : 제1 센서모듈 120 : 제2 센서모듈
130 : 제3 센서모듈 200 : 판단부
210 : 주행환경 판단부 220 : 충돌위험 판단부
230 : 제어방법 결정부 300 : 제어부
310 : 경보 제어부 320 : 구동 제어부
321 : 제동 제어부 322 : 조향 제어부
Claims (10)
- 복수의 센서모듈들을 포함하여 이동수단의 주행환경을 센싱하는 센서부;
상기 센서모듈들에서 센싱된 정보를 바탕으로 주행환경 및 충돌 위험도를 각각 판단하는 주행환경 판단부 및 충돌위험 판단부, 및 상기 주행환경에 따라 상기 이동수단에 대하여 제동제어 및 조향제어 중 적어도 하나를 선택하여 제어방법을 결정하는 제어방법 결정부를 포함하는 판단부; 및
상기 판단부의 충돌 위험도의 판단에 따라 사용자에게 경보를 수행하는 경보 제어부, 및 상기 판단부에서 결정된 제어방법에 따라 상기 이동수단의 제동을 제어하거나 상기 이동수단의 조향을 제어하는 제동 제어부 및 조향 제어부를 포함하는 제어부를 포함하는 능동 안전시스템. - 제1항에 있어서,
상기 이동수단은 전동 휠체어, 전동 스쿠터 또는 개인용 이동수단(personal mobility vehicle)인 것을 특징으로 하는 능동 안전시스템. - 제1항에 있어서, 상기 센서모듈들은,
장애물과의 거리를 센싱하는 초음파 센서 또는 IR(infrared ray) 센서;
장애물의 형상을 센싱하는 비전(vison) 센서;
상기 이동수단의 속도 또는 가속도를 센싱하는 가속도 센서; 및
상기 이동수단의 위치를 센싱하는 GPS 센서를 포함하는 것을 특징으로 하는 능동 안전시스템. - 제3항에 있어서,
상기 IR 센서는 지면을 향하도록 고정되어 지면의 상태를 센싱하며,
상기 충돌위험 판단부는 상기 IR 센서에서 센싱되는 거리에 관한 정보가 급격하게 설정값(threshold) 이상 또는 이하이면 상기 지면에 둔턱부 또는 절벽부가 있는 것으로 판단하는 것을 특징으로 하는 능동 안전시스템. - 제1항에 있어서,
상기 주행환경 판단부는 상기 이동수단이 실내주행인지 실외주행인지를 판단하며,
상기 제어방법 결정부는 실내주행이면 제동제어 및 조향제어를 모두 수행하도록 제어방법을 결정하고, 실외주행이면 제동제어를 수행하도록 제어방법을 결정하는 것을 특징으로 하는 능동 안전시스템. - 제5항에 있어서, 상기 제동제어가 수행되는 경우,
상기 충돌위험 판단부에서는 충돌 위험도(time to collision, TTC)가 자동제동도(time to brake, tB)보다 작은 경우 자동제동상태로 판단하며, 상기 제동제어부가 상기 이동수단을 자동으로 제어하며,
TTC=(장애물까지의 거리)/(이동수단의 속도)
tB=(제동거리)/(이동수단의 속도)
인 것을 특징으로 하는 능동 안전시스템. - 제6항에 있어서, 상기 제동제어가 수행되는 경우,
상기 충돌위험 판단부에서는 충돌 위험도(TTC)가 충돌 경보도(time to warning, tBw)보다 작은 경우 충돌 경보상태로 판단하며, 상기 경보제어부가 충돌을 경보하며,
tBw=tB+tr(반응시간)
인 것을 특징으로 하는 능동 안전시스템. - 제5항에 있어서, 상기 조향제어가 수행되는 경우,
상기 충돌위험 판단부에서는 충돌 위험도(TTC)가 자동조향도(time to steer, tS)보다 작은 경우 자동조향상태로 판단하며, 상기 조향제어부가 상기 이동수단을 자동으로 조향하며,
tS=treduce(감속시간)+tLPS(최종조향시간)
tLPS=(Sy: 측면회피거리, ay: 측면가속도)
인 것을 특징으로 하는 능동 안전시스템. - 제8항에 있어서, 상기 조향제어가 수행되는 경우,
상기 충돌위험 판단부에서는 충돌 위험도(TTC)가 회피 경보도(time to steering warning, tsw)보다 작은 경우 회피 경보상태로 판단하며, 상기 경보제어부가 회피를 경보하며,
tSw=tS+tr(반응시간)
인 것을 특징으로 하는 능동 안전시스템. - 제8항에 있어서, 상기 조향제어가 수행되는 경우,
상기 이동수단의 속도가 하기 조건인 경우,
(v: 이동수단의 속도, r: 회전 반경, μ: 마찰계수, g: 중력가속도)
상기 제동제어부에서 상기 이동수단의 속도를 감속시킨 후 상기 조향제어부에서 상기 이동수단의 조향을 제어하는 것을 특징으로 하는 능동 안전시스템.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020160027086A KR101794838B1 (ko) | 2016-03-07 | 2016-03-07 | 개인 이동수단용 능동안전 시스템 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020160027086A KR101794838B1 (ko) | 2016-03-07 | 2016-03-07 | 개인 이동수단용 능동안전 시스템 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20170104267A true KR20170104267A (ko) | 2017-09-15 |
| KR101794838B1 KR101794838B1 (ko) | 2017-11-09 |
Family
ID=59926832
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020160027086A Active KR101794838B1 (ko) | 2016-03-07 | 2016-03-07 | 개인 이동수단용 능동안전 시스템 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR101794838B1 (ko) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102178498B1 (ko) * | 2019-09-06 | 2020-11-13 | 인하대학교 산학협력단 | 휠체어의 주행 정보 및 사용자의 운전 정보에 기반하여 안전성을 평가하는 휠체어 운영 시스템 및 방법 |
| KR102686887B1 (ko) * | 2023-06-13 | 2024-07-22 | 주식회사 삼텔랩스 | 전동식 휠체어 및 그 제어방법 |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102019119597B4 (de) * | 2019-07-19 | 2025-07-24 | Dr. Ing. H.C. F. Porsche Aktiengesellschaft | Elektrisch angetriebenes Kleinstfahrzeug |
| KR102844373B1 (ko) * | 2021-04-29 | 2025-08-08 | 주식회사 하이코어 | 전동 이동체 제동 시스템 및 이를 이용한 전동 이동체 제동 방법 |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011218075A (ja) * | 2010-04-14 | 2011-11-04 | Quest Engineering:Kk | 電動車椅子 |
| EP2701093B1 (en) * | 2012-08-20 | 2016-06-22 | Honda Research Institute Europe GmbH | Sensing system and method for detecting moving objects |
-
2016
- 2016-03-07 KR KR1020160027086A patent/KR101794838B1/ko active Active
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102178498B1 (ko) * | 2019-09-06 | 2020-11-13 | 인하대학교 산학협력단 | 휠체어의 주행 정보 및 사용자의 운전 정보에 기반하여 안전성을 평가하는 휠체어 운영 시스템 및 방법 |
| KR102686887B1 (ko) * | 2023-06-13 | 2024-07-22 | 주식회사 삼텔랩스 | 전동식 휠체어 및 그 제어방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR101794838B1 (ko) | 2017-11-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9505411B2 (en) | Drive assist device | |
| US10222796B2 (en) | Autonomous driving control apparatus | |
| EP1884449B1 (en) | Vehicle deviation preventing apparatus | |
| EP3078515B1 (en) | Collision avoidance based on front wheel off tracking during reverse operation | |
| CN104487308B (zh) | 驾驶辅助装置 | |
| JP6428713B2 (ja) | 情報表示装置 | |
| JP4371153B2 (ja) | 自律移動装置 | |
| KR101478068B1 (ko) | 차량 충돌 방지 장치 및 그 방법 | |
| KR101665451B1 (ko) | 차량의 긴급제동 상황 판단 방법 및 장치 | |
| KR102763948B1 (ko) | 차량 충돌방지 장치 및 방법 | |
| KR101984520B1 (ko) | 차량 충돌 방지 장치 및 방법 | |
| KR20100106570A (ko) | 차량, 특히 유틸리티 차량의 충돌을 피하거나, 충돌의 피해를 줄이기 위한 장치, 방법, 컴퓨터 프로그램 | |
| CN110178141A (zh) | 用于操控自主机动车辆的方法 | |
| KR101794838B1 (ko) | 개인 이동수단용 능동안전 시스템 | |
| JP2020044938A (ja) | 車両の制御システム及び車両の制御方法 | |
| CN112721806A (zh) | 用于坡度路段的盲区辅助的方法和装置 | |
| JP2006331323A (ja) | 車両逸脱警報装置 | |
| JP5016503B2 (ja) | 車両の接触回避支援装置 | |
| JP2006301842A (ja) | 車両の運転支援装置 | |
| US20240278776A1 (en) | Method and apparatus for collision avoidance or impact force reduction | |
| JP2004237813A (ja) | 車両用制動制御装置 | |
| KR20190050643A (ko) | 고속도로 주행 지원 시스템 연동 자동 긴급 제동 시스템 및 방법 | |
| US12459526B2 (en) | Driving assistance device | |
| JP6951915B2 (ja) | 報知装置 | |
| KR20190046035A (ko) | 전동식 동력 조향 제어장치 및 제어방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| PA0109 | Patent application |
Patent event code: PA01091R01D Comment text: Patent Application Patent event date: 20160307 |
|
| PA0201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20170413 Patent event code: PE09021S01D |
|
| PG1501 | Laying open of application | ||
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
Patent event code: PE07011S01D Comment text: Decision to Grant Registration Patent event date: 20171025 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
Comment text: Registration of Establishment Patent event date: 20171101 Patent event code: PR07011E01D |
|
| PR1002 | Payment of registration fee |
Payment date: 20171102 End annual number: 3 Start annual number: 1 |
|
| PG1601 | Publication of registration | ||
| PR1001 | Payment of annual fee |
Payment date: 20210908 Start annual number: 5 End annual number: 5 |
|
| PR1001 | Payment of annual fee |
Payment date: 20220906 Start annual number: 6 End annual number: 6 |
|
| PR1001 | Payment of annual fee |
Payment date: 20231221 Start annual number: 7 End annual number: 7 |
|
| PR1001 | Payment of annual fee |
Payment date: 20240116 Start annual number: 8 End annual number: 19 |