KR20170105334A - 카메라 모듈 - Google Patents
카메라 모듈 Download PDFInfo
- Publication number
- KR20170105334A KR20170105334A KR1020160028427A KR20160028427A KR20170105334A KR 20170105334 A KR20170105334 A KR 20170105334A KR 1020160028427 A KR1020160028427 A KR 1020160028427A KR 20160028427 A KR20160028427 A KR 20160028427A KR 20170105334 A KR20170105334 A KR 20170105334A
- Authority
- KR
- South Korea
- Prior art keywords
- arm
- camera module
- main body
- motor
- arms
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images








Classifications
-
- H04N5/232—
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B17/00—Details of cameras or camera bodies; Accessories therefor
- G03B17/02—Bodies
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B17/00—Details of cameras or camera bodies; Accessories therefor
- G03B17/56—Accessories
- G03B17/561—Support related camera accessories
-
- G06K9/00335—
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/10—Terrestrial scenes
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V40/00—Recognition of biometric, human-related or animal-related patterns in image or video data
- G06V40/10—Human or animal bodies, e.g. vehicle occupants or pedestrians; Body parts, e.g. hands
- G06V40/16—Human faces, e.g. facial parts, sketches or expressions
- G06V40/161—Detection; Localisation; Normalisation
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V40/00—Recognition of biometric, human-related or animal-related patterns in image or video data
- G06V40/10—Human or animal bodies, e.g. vehicle occupants or pedestrians; Body parts, e.g. hands
- G06V40/16—Human faces, e.g. facial parts, sketches or expressions
- G06V40/168—Feature extraction; Face representation
- G06V40/171—Local features and components; Facial parts ; Occluding parts, e.g. glasses; Geometrical relationships
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N1/00—Scanning, transmission or reproduction of documents or the like, e.g. facsimile transmission; Details thereof
- H04N1/00127—Connection or combination of a still picture apparatus with another apparatus, e.g. for storage, processing or transmission of still picture signals or of information associated with a still picture
- H04N1/00281—Connection or combination of a still picture apparatus with another apparatus, e.g. for storage, processing or transmission of still picture signals or of information associated with a still picture with a telecommunication apparatus, e.g. a switched network of teleprinters for the distribution of text-based information, a selective call terminal
- H04N1/00307—Connection or combination of a still picture apparatus with another apparatus, e.g. for storage, processing or transmission of still picture signals or of information associated with a still picture with a telecommunication apparatus, e.g. a switched network of teleprinters for the distribution of text-based information, a selective call terminal with a mobile telephone apparatus
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/50—Constructional details
- H04N23/51—Housings
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/62—Control of parameters via user interfaces
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/66—Remote control of cameras or camera parts, e.g. by remote control devices
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/66—Remote control of cameras or camera parts, e.g. by remote control devices
- H04N23/661—Transmitting camera control signals through networks, e.g. control via the Internet
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/698—Control of cameras or camera modules for achieving an enlarged field of view, e.g. panoramic image capture
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Human Computer Interaction (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Health & Medical Sciences (AREA)
- Theoretical Computer Science (AREA)
- General Health & Medical Sciences (AREA)
- Computer Vision & Pattern Recognition (AREA)
- General Engineering & Computer Science (AREA)
- Studio Devices (AREA)
Abstract
Description
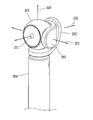
도 2는 본 발명과 관련된 카메라 모듈이 제1상태로 배치된 상태를 도시한 것이다.
도 3는 본 발명의 일 실시예에 따른 카메라 모듈의 분해도이다.
도 4a 및 도 4b는 본 발명과 관련된 카메라 모듈이 제2상태로 배치된 상태를 도시한 도이다.
도 5a 및 도 5b는 본 발명과 관련된 피사체 추적 모드를 설명하기 위한 개념도들이다.
도 6a 및 도 6b는 본 발명과 관련된 촬영 방향 설정 모드를 설명하기 위한 개념도들이다.
Claims (10)
- 구 형태로 이루어지며, 외부 환경을 촬영하는 카메라를 구비하는 본체;
상기 본체와 연결되며, 상기 본체를 회전시키도록 형성되는 제1모터를 구비하는 제1암;
상기 제1암과 연결되며, 상기 제1암을 회전시키도록 형성되는 제2모터를 구비하는 제2암; 및
상기 제2암과 연결되며, 상기 제2암을 회전시키도록 형성되는 제3모터를 구비하는 고정체를 포함하며,
상기 카메라가 놓인 3차원 공간 상 모든 방향에 대하여 촬영이 가능하도록, 상기 본체와 제1 및 제2암은 각각 독립적으로 회전 가능하도록 이루어지는 것을 특징으로 하는 카메라 모듈. - 제1항에 있어서,
상기 제1 및 제2암은, 각각 상기 본체 및 제1암의 적어도 일부를 감싸도록 곡면 형태로 이루어지는 것을 특징으로 하는 카메라 모듈. - 제2항에 있어서,
상기 곡면의 적어도 일부에 대응되는 곡선궤적의 중심은 상기 본체 내부에 형성되는 것을 특징으로 하는 카메라 모듈. - 제1항에 있어서,
상기 제2암이 상기 제1암의 일면 전체를 감쌀 수 있도록, 상기 제2암의 길이는 제1암의 길이보다 길게 형성되는 것을 특징으로 하는 카메라 모듈. - 제1항에 있어서,
상기 제1암상에서, 상기 제2모터의 회전축이 결합되는 위치는, 상기 제1모터의 회전축이 관통되기 위한 제1관통홀이 형성되는 위치와 상이하며,
상기 제2모터의 회전축은, 상기 제2모터의 회전축에 대응되는 축이 상기 제1모터의 회전축에 대응되는 축과 대체로 수직하도록, 상기 제1암에 결합되는 것을 특징으로 하는 카메라 모듈. - 제1항에 있어서,
상기 카메라 모듈의 상태 변경과 관련된 사용자 요청이 입력되면, 상기 제1 및 제2암은, 서로 포개지도록 배치되는 제1상태와 서로 교차하도록 배치되는 제2상태 사이에서 상대 회전되는 것을 특징으로 하는 카메라 모듈. - 제6항에 있어서,
상기 제2상태에서, 상기 제1 내지 제3모터의 회전축은 상기 3차원 공간의 서로 다른 직교하는 축에 각각 대응되도록 놓이는 것을 특징으로 하는 카메라 모듈. - 제1항에 있어서,
상기 카메라를 통해 실시간으로 입력되는 영상을 분석하는 제어부를 더 포함하며,
상기 제어부는,
상기 영상에 포함된 특정 피사체 상의 위치 이동이 감지되면, 상기 본체, 제1 및 제2암 중 적어도 하나의 회전에 의해 상기 특정 피사체 상이 지속적으로 상기 영상 내에 포함되도록, 상기 제1 내지 제3모터를 제어하는 것을 특징으로 하는 카메라 모듈. - 제8항에 있어서,
외부기기로부터 데이터를 송수신하도록 이루어지는 무선 통신부를 더 포함하며,
상기 제어부는,
상기 외부기기로부터 촬영 방향과 관련된 정보가 수신되면, 상기 본체, 제1 및 제2암 중 적어도 하나의 회전에 의해 상기 촬영 방향대로 카메라의 촬영이 이루어지도록, 상기 제1 내지 제3모터 중 적어도 하나를 제어하는 것을 특징으로 하는 카메라 모듈. - 제1항에 있어서,
상기 본체 및 고정체에 구비되며, 상기 본체 및 고정체 각각의 움직임을 센싱하기 위한 제1 및 제2센싱부;
상기 제1 및 제2센싱부에서 센싱된 측정값을 기반으로 산출된 제1 내지 제3속도로 회전되도록 상기 제1 내지 제3모터를 제어하는 제어부를 더 포함하는 카메라 모듈.
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020160028427A KR20170105334A (ko) | 2016-03-09 | 2016-03-09 | 카메라 모듈 |
| US15/181,016 US9924088B2 (en) | 2016-03-09 | 2016-06-13 | Camera module |
| CN201680083193.9A CN108781253B (zh) | 2016-03-09 | 2016-06-28 | 相机模块以及控制相机模块的方法 |
| EP16893674.8A EP3427470B1 (en) | 2016-03-09 | 2016-06-28 | Camera module |
| PCT/KR2016/006913 WO2017155159A1 (en) | 2016-03-09 | 2016-06-28 | Camera module |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020160028427A KR20170105334A (ko) | 2016-03-09 | 2016-03-09 | 카메라 모듈 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20170105334A true KR20170105334A (ko) | 2017-09-19 |
Family
ID=59849995
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020160028427A Ceased KR20170105334A (ko) | 2016-03-09 | 2016-03-09 | 카메라 모듈 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9924088B2 (ko) |
| EP (1) | EP3427470B1 (ko) |
| KR (1) | KR20170105334A (ko) |
| CN (1) | CN108781253B (ko) |
| WO (1) | WO2017155159A1 (ko) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20190069801A (ko) * | 2017-12-12 | 2019-06-20 | 엘지이노텍 주식회사 | 카메라 구동장치, 카메라 구동 방법 및 짐벌장치 |
| KR20240083586A (ko) * | 2022-12-05 | 2024-06-12 | 오신석 | 피사체 추적 촬영용 거치장치 |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20170192342A1 (en) * | 2016-01-05 | 2017-07-06 | ZEROTECH (Chongqing) Intelligence Technology Co., Ltd. | Camera apparatus |
| USD885456S1 (en) * | 2018-06-07 | 2020-05-26 | Flir Systems Trading Belgium Bvba | Camera |
| USD874539S1 (en) | 2018-06-29 | 2020-02-04 | SZ DJI Technology Co., Ltd. | Stabilized camera device |
| GB2582127B (en) * | 2019-01-07 | 2023-07-05 | Portable Multimedia Ltd | Mount, accessory and assembly |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07234447A (ja) * | 1993-12-28 | 1995-09-05 | Canon Inc | 撮影ユニットおよびカメラ |
| WO1996024216A1 (en) * | 1995-01-31 | 1996-08-08 | Transcenic, Inc. | Spatial referenced photography |
| US8767120B2 (en) | 2010-07-07 | 2014-07-01 | Panasonic Corporation | Camera drive device |
| RU2589534C2 (ru) * | 2011-09-09 | 2016-07-10 | ШЗ ДЦзИ ТЕКНОЛОДЖИ КО., ЛТД | Платформа для использования в малоразмерных беспилотных летательных аппаратах |
| JP2013143760A (ja) | 2012-01-13 | 2013-07-22 | Canon Inc | ドーム型監視カメラ |
| US20130321656A1 (en) * | 2012-04-06 | 2013-12-05 | Hoverfly Technologies, Inc. | Wireless network connected camera positioning system |
| CA2875266C (en) | 2012-06-18 | 2022-01-11 | Collineo Inc. | Remote visual inspection system and method |
| US8485740B1 (en) | 2012-06-19 | 2013-07-16 | Chapman/Leonard Studio Equipment, Inc. | Camera head with pan, roll and tilt movement |
| US9058738B1 (en) * | 2013-07-26 | 2015-06-16 | SkyBell Technologies, Inc. | Doorbell communication systems and methods |
| US20150312468A1 (en) | 2014-04-23 | 2015-10-29 | Narvaro Inc. | Multi-camera system controlled by head rotation |
| US10095942B2 (en) * | 2014-12-15 | 2018-10-09 | Reflex Robotics, Inc | Vision based real-time object tracking system for robotic gimbal control |
| CN204272274U (zh) * | 2014-12-31 | 2015-04-15 | 李连福 | 摄像机稳定器 |
-
2016
- 2016-03-09 KR KR1020160028427A patent/KR20170105334A/ko not_active Ceased
- 2016-06-13 US US15/181,016 patent/US9924088B2/en not_active Expired - Fee Related
- 2016-06-28 CN CN201680083193.9A patent/CN108781253B/zh not_active Expired - Fee Related
- 2016-06-28 EP EP16893674.8A patent/EP3427470B1/en not_active Not-in-force
- 2016-06-28 WO PCT/KR2016/006913 patent/WO2017155159A1/en not_active Ceased
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20190069801A (ko) * | 2017-12-12 | 2019-06-20 | 엘지이노텍 주식회사 | 카메라 구동장치, 카메라 구동 방법 및 짐벌장치 |
| KR20240083586A (ko) * | 2022-12-05 | 2024-06-12 | 오신석 | 피사체 추적 촬영용 거치장치 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN108781253B (zh) | 2020-11-06 |
| EP3427470A4 (en) | 2019-12-11 |
| US20170272641A1 (en) | 2017-09-21 |
| CN108781253A (zh) | 2018-11-09 |
| US9924088B2 (en) | 2018-03-20 |
| EP3427470B1 (en) | 2020-12-16 |
| WO2017155159A1 (en) | 2017-09-14 |
| EP3427470A1 (en) | 2019-01-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10831093B1 (en) | Focus control for a plurality of cameras in a smartphone | |
| CN107037876B (zh) | 系统及控制其的方法 | |
| CN116360604B (zh) | 用于在虚拟现实环境中对准组件的方法和设备 | |
| EP2616907B1 (en) | Control of applications on a head-mounted display using gesture and motion commands | |
| KR102176364B1 (ko) | 글래스 타입 단말기 | |
| KR20170105334A (ko) | 카메라 모듈 | |
| KR20180075191A (ko) | 무인 이동체를 제어하기 위한 방법 및 전자 장치 | |
| US20210409531A1 (en) | Mobile terminal | |
| KR20170123907A (ko) | 이동단말기 및 그 제어방법 | |
| KR20160125674A (ko) | 이동 단말기 및 그 제어 방법 | |
| KR20180040409A (ko) | 이동 단말기 및 그 제어방법 | |
| KR20160008372A (ko) | 이동 단말기 및 그것의 제어방법 | |
| EP3260964B1 (en) | Mobile terminal and method for controlling the same | |
| JP7155242B2 (ja) | 携帯情報端末 | |
| KR20180113406A (ko) | 가상 공간을 이탈한 컨트롤러의 추적 방법 및 그 전자장치 | |
| CN114144753B (zh) | 图像处理装置、图像处理方法和记录介质 | |
| KR20200045946A (ko) | 이동 단말기 | |
| KR20170142460A (ko) | 케이싱 디바이스 | |
| KR101695695B1 (ko) | 이동단말기 및 그 제어방법 | |
| KR20190061825A (ko) | Hmd 및 그 hmd의 제어 방법 | |
| KR20180025864A (ko) | 카메라 모듈 및 이를 구비하는 이동 단말기 | |
| CN115253275B (zh) | 智能终端、掌机、虚拟系统及智能终端的空间定位方法 | |
| KR20170025020A (ko) | 이동단말기 및 그 제어방법 | |
| KR101677658B1 (ko) | 이동 단말기 및 그 제어방법 | |
| KR20240037121A (ko) | 사용자의 외부 환경을 촬영하는 컨트롤 장치 및 그 동작 방법 및 컨트롤 장치와 연결된 머리 착용형 전자 장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
Patent event code: PA01091R01D Comment text: Patent Application Patent event date: 20160309 |
|
| PG1501 | Laying open of application | ||
| A201 | Request for examination | ||
| PA0201 | Request for examination |
Patent event code: PA02012R01D Patent event date: 20210111 Comment text: Request for Examination of Application Patent event code: PA02011R01I Patent event date: 20160309 Comment text: Patent Application |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20220421 Patent event code: PE09021S01D |
|
| E601 | Decision to refuse application | ||
| PE0601 | Decision on rejection of patent |
Patent event date: 20221004 Comment text: Decision to Refuse Application Patent event code: PE06012S01D Patent event date: 20220421 Comment text: Notification of reason for refusal Patent event code: PE06011S01I |
|
| E601 | Decision to refuse application | ||
| E801 | Decision on dismissal of amendment | ||
| PE0601 | Decision on rejection of patent |
Patent event date: 20230201 Comment text: Decision to Refuse Application Patent event code: PE06012S01D Patent event date: 20220421 Comment text: Notification of reason for refusal Patent event code: PE06011S01I |
|
| PE0801 | Dismissal of amendment |
Patent event code: PE08012E01D Comment text: Decision on Dismissal of Amendment Patent event date: 20230201 Patent event code: PE08011R01I Comment text: Amendment to Specification, etc. Patent event date: 20230102 Patent event code: PE08011R01I Comment text: Amendment to Specification, etc. Patent event date: 20220609 |