KR20170105701A - 스캐닝 장치 및 이의 동작 방법 - Google Patents
스캐닝 장치 및 이의 동작 방법 Download PDFInfo
- Publication number
- KR20170105701A KR20170105701A KR1020160028498A KR20160028498A KR20170105701A KR 20170105701 A KR20170105701 A KR 20170105701A KR 1020160028498 A KR1020160028498 A KR 1020160028498A KR 20160028498 A KR20160028498 A KR 20160028498A KR 20170105701 A KR20170105701 A KR 20170105701A
- Authority
- KR
- South Korea
- Prior art keywords
- path
- laser light
- image
- sub
- frame
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images









Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/10—Processing, recording or transmission of stereoscopic or multi-view image signals
- H04N13/106—Processing image signals
- H04N13/156—Mixing image signals
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/88—Lidar systems specially adapted for specific applications
- G01S17/89—Lidar systems specially adapted for specific applications for mapping or imaging
-
- H04N13/0275—
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/50—Depth or shape recovery
- G06T7/521—Depth or shape recovery from laser ranging, e.g. using interferometry; from the projection of structured light
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N1/00—Scanning, transmission or reproduction of documents or the like, e.g. facsimile transmission; Details thereof
- H04N1/00795—Reading arrangements
- H04N1/00827—Arrangements for reading an image from an unusual original, e.g. 3-dimensional objects
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/20—Image signal generators
- H04N13/204—Image signal generators using stereoscopic image cameras
- H04N13/207—Image signal generators using stereoscopic image cameras using a single two-dimensional [2D] image sensor
- H04N13/218—Image signal generators using stereoscopic image cameras using a single two-dimensional [2D] image sensor using spatial multiplexing
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/20—Image signal generators
- H04N13/204—Image signal generators using stereoscopic image cameras
- H04N13/254—Image signal generators using stereoscopic image cameras in combination with electromagnetic radiation sources for illuminating objects
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N5/00—Details of television systems
- H04N5/222—Studio circuitry; Studio devices; Studio equipment
- H04N5/2224—Studio circuitry; Studio devices; Studio equipment related to virtual studio applications
- H04N5/2226—Determination of depth image, e.g. for foreground/background separation
-
- H04N5/225—
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Electromagnetism (AREA)
- General Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Mechanical Optical Scanning Systems (AREA)
- Optics & Photonics (AREA)
- Theoretical Computer Science (AREA)
- Length Measuring Devices By Optical Means (AREA)
- Optical Radar Systems And Details Thereof (AREA)
Abstract
본 발명의 스캐닝 장치는 피사체를 복수의 이미지 영역들로 분할하고, 상기 이미지영역들에 인터레이스(interlaced) 방식으로 레이저광을 송신하는 송신 모듈과, 상기 피사체에서 반사된 레이저광을 수신하는 수신 모듈과, 상기 반사된 레이저광을 기초로 TOF(Time Of Flight) 기술에 의해 상기 피사체의 형상을 스캔하는 신호 처리모듈을 포함하고, 상기 신호 처리모듈은 상기 인터레이스 방식에 의해 생성된 서브 프레임들을 오버래핑(overlapping)하여 상기 피사체의 형상에 대한 단일의 이미지 영상을 생성한다.
Description
본 발명의 개념에 따른 실시 예는 스캐닝 장치 및 이의 동작 방법에 관한 것이다.
삼차원 영상에 대한 고속획득방법은 빠르고 정확한 사물 인식 및 동작 제어가 필요한 분야에 필수적인 요소이다. 고속으로 삼차원 영상획득이 가능한 삼차원 영상센서는 기계, 로봇, 자동차, 자동차 산업, 게임/교육 콘텐츠 산업 등 다양한 산업에서 활용이 가능하며, 특히 무인화, 자율화가 요구되는 대부분의 산업에서 큰 활용도가 있을 것으로 기대된다.
공간을 삼차원으로 인식하는 기술은 광원의 사용 여부에 따라 빛을 조사하는 액티브 방식과 패시브 방식으로 구분될 수 있으며, 액티브 방식이 패시브 방식보다 각광받는 추세이다. 액티브 방식은 특정 패턴의 광에너지를 피사체에 조사하고, 피사체로부터 광에너지가 반사되어 되돌아 오는 반사 시간차를 이용하는 TOF(Time-of-flight) 기술에 기반을 둔다.
특히, TOF 기술은 광에너지로 펄스 또는 변조된 연속파 광원을 이용할 수 있는데, 광에너지가 피사체에 반사되어 돌아오는 시간을 계산하고, 광원과 피사체 사이의 거리를 계산하여 공간을 인식할 수 있다. 이러한 TOF 기술은 분해능이 높고, 장거리에 배치된 피사체의 삼차원 이미지 영상을 측정하는데 유용하다.
본 발명이 이루고자하는 기술적인 과제는 인터레이스(interlaced) 및 오버래핑(overlapping) 방식을 이용하여 스캐닝 패턴의 소프트웨어적인 프로그래밍을 통해 삼차원 영상을 생성함으로써, 추가적인 하드웨어 없이 고속 및 고정밀 스캐닝 삼차원 영상을 구현하는 것이다.
본 발명의 실시 예에 따른 스캐닝 장치는, 피사체를 복수의 이미지 영역들로 분할하고, 상기 이미지 영역들 상에서 인터레이스(interlaced) 방식에 의해 레이저광을 조사하는 송신 모듈과, 상기 피사체로부터 반사된 레이저광을 수신하는 수신 모듈과, 상기 반사된 레이저광을 기초로 TOF(Time Of Flight) 기술에 의해 상기 피사체의 형상을 스캔하는 신호 처리모듈을 포함하고, 상기 신호 처리모듈은 상기 인터레이스 방식에 의해 생성된 서브 프레임들을 오버래핑(overlapping)하여 상기 피사체의 형상에 대한 단일의 이미지 영상을 생성한다.
실시 예에 따라, 상기 송신 모듈은 상기 복수의 이미지 영역들 상에서 제1 경로를 따라 상기 레이저광을 조사하고, 상기 제1 경로가 종료된 지점부터 연속하여 상기 제1 경로와 반대 방향의 제2 경로를 따라 상기 레이저광을 조사할 수 있다.
실시 예에 따라, 상기 제1 경로와 제2 경로는 중첩되지 않을 수 있다.
실시 예에 따라, 상기 제1 경로와 상기 제2 경로는 상기 복수의 이미지 영역들 상에서 일정한 간격을 두고 교번적으로 배치될 수 있다.
실시 예에 따라, 상기 신호 처리모듈은, 상기 제1 경로를 따라 반사된 상기 레이저광을 이용하여 제1 서브 프레임을 생성하고, 상기 제2 경로를 따라 반사된 상기 레이저광을 이용하여 제2 서브 프레임을 생성할 수 있다.
실시 예에 따라, 상기 신호 처리모듈은 상기 제1 서브 프레임과 상기 제2 서브 프레임을 오버래핑하여 상기 단일의 이미지 영상을 생성할 수 있다.
실시 예에 따라, 상기 단일의 이미지 영상은 삼차원 이미지 영상일 수 있다.
본 발명의 다른 실시 예에 따른 스캐닝 장치의 동작 방법은, 피사체를 복수의 이미지 영역들로 분할하는 단계와, 상기 복수의 이미지 영역들 상에서 인터레이스 방식에 의해 레이저광을 조사하는 단계와, 상기 피사체로부터 반사된 레이저광을 수신하는 단계와, 상기 반사된 레이저광을 기초로 TOF(Time Of Flight) 기술에 의해 상기 피사체의 형상에 대한 이미지 영상을 생성하는 단계를 포함한다.
실시 예에 따라, 상기 이미지 영상은 삼차원 이미지 영상일 수 있다.
실시 예에 따라, 상기 레이저광을 조사하는 단계는, 상기 복수의 이미지 영역들 중 제1 이미지 영역 상에서 제1 경로를 따라 상기 레이저광을 조사하고, 상기 복수의 이미지 영역들 중 나머지에서 상기 제1 경로와 일정한 간격을 두고 떨어진 제2 경로를 따라 상기 레이저광을 조사할 수 있다.
실시 예에 따라, 상기 제1 경로가 종료되는 지점은 상기 제2 경로가 시작되는 지점과 동일할 수 있다.
실시 예에 따라, 상기 제1 경로의 진행방향과 상기 제2 경로의 진행방향은 서로 반대일 수 있다.
실시 예에 따라, 상기 제1 경로의 진행방향과 상기 제2 경로의 진행방향으로 서로 평행할 수 있다.
실시 예에 따라, 상기 이미지 영상을 생성하는 단계는,상기 제1 경로를 따라 상기 반사된 레이저광을 기초로 제1 서브 프레임을 생성하고, 상기 제2 경로를 따라 상기 반사된 레이저광을 기초로 제2 서브 프레임을 생성하고, 상기 제1 서브 프레임과 상기 제2 서브 프레임을 오버래핑하여 단일의 상기 이미지 영상을 생성할 수 있다.
실시 예에 따라, 상기 레이저광을 조사하는 단계는, 상기 복수의 이미지 영역들 상에서 양방향성 왕복 진행(round trip) 경로를 따라 상기 레이저광을 조사할 수 있다.
본 발명의 실시 예에 의한 스캐닝 장치 및 이의 동작 방법에 의하면, 별도의 하드웨어 구성을 추가하지 않고, 단지 인터레이스(interlaced) 방식에 대한 스캐닝 패턴의 프로그래밍을 통해 왜곡 없는 고속 삼차원 영상을 획득할 수 있으며, 오버래핑(overlapping) 기술에 기반하여 복수의 서브 프레임들을 단일의 삼차원 영상으로 생성할 수 있다.
또한, 본 발명의 실시 예에 의한 스캐닝 장치 및 이의 동작 방법에 의하면, 싱글 패턴 스캐닝이 아닌 듀얼(dual) 패턴 스캐닝을 적용하여 스캐닝 장치의 양방향 왕복 진행(round trip)을 구현할 수 있고, 스캐닝 장의 양방향 왕복 진행에 의해 싱글 패턴 스캐닝보다 두 배의 속도로 대상을 스캐닝할 수 있다.
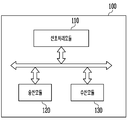
도 1은 본 발명의 실시 예에 따른 스캐닝 시스템의 개략적인 개념도이다.
도 2는 본 발명의 실시 예에 따른 스캐닝 장치의 블록도이다.
도 3은 본 발명의 실시 예에 따른 복수의 이미지 영역을 설명하기 위한 개념도이다.
도 4a는 본 발명의 실시 예에 따른 제1 스캔 경로를 따라 레이저광을 조사하는 방법을 설명하기 위한 개념도이다.
도 4b는 본 발명의 실시 예에 따른 제2 스캔 경로를 따라 레이저광을 조사하는 방법을 설명하기 위한 개념도이다.
도 4c는 도 4a 및 도 4b에 도시된 제1 스캔 경로와 제2 스캔 경로에 따라 레이저광을 조사하는 스캐닝 장치의 동작방법을 설명하기 위한 개념도이다.
도 5는 본 발명의 다른 실시 예에 따른 스캐닝 장치의 동작 방법을 설명하기 위한 개념도이다.
도 6은 본 발명의 또 다른 실시 예에 따른 스캐닝 장치의 동작 방법을 설명하기 위한 개념도이다.
도 7은 본 발명의 또 다른 실시 예에 따른 스캐닝 장치의 동작 방법을 설명하기 위한 개념도이다.
도 8의 (a)는 종래의 스캐닝 장치의 싱글 스캐닝 동작을 설명하기 위한 그래프이고, 도 8의 (b)는 본 발명의 실시 예에 따른 스캐닝 장치의 듀얼 스캐닝 동작을 설명하기 위한 그래프이다.
도 9의 (a) 및 (b)는 본 발명의 실시 예에 따른 스캐닝 장치를 포함하는 자동차를 설명하기 위한 개념도이다.
도 10은 본 발명의 실시 예에 의한 스캐닝 장치의 동작 방법을 설명하기 위한 흐름도이다.
도 2는 본 발명의 실시 예에 따른 스캐닝 장치의 블록도이다.
도 3은 본 발명의 실시 예에 따른 복수의 이미지 영역을 설명하기 위한 개념도이다.
도 4a는 본 발명의 실시 예에 따른 제1 스캔 경로를 따라 레이저광을 조사하는 방법을 설명하기 위한 개념도이다.
도 4b는 본 발명의 실시 예에 따른 제2 스캔 경로를 따라 레이저광을 조사하는 방법을 설명하기 위한 개념도이다.
도 4c는 도 4a 및 도 4b에 도시된 제1 스캔 경로와 제2 스캔 경로에 따라 레이저광을 조사하는 스캐닝 장치의 동작방법을 설명하기 위한 개념도이다.
도 5는 본 발명의 다른 실시 예에 따른 스캐닝 장치의 동작 방법을 설명하기 위한 개념도이다.
도 6은 본 발명의 또 다른 실시 예에 따른 스캐닝 장치의 동작 방법을 설명하기 위한 개념도이다.
도 7은 본 발명의 또 다른 실시 예에 따른 스캐닝 장치의 동작 방법을 설명하기 위한 개념도이다.
도 8의 (a)는 종래의 스캐닝 장치의 싱글 스캐닝 동작을 설명하기 위한 그래프이고, 도 8의 (b)는 본 발명의 실시 예에 따른 스캐닝 장치의 듀얼 스캐닝 동작을 설명하기 위한 그래프이다.
도 9의 (a) 및 (b)는 본 발명의 실시 예에 따른 스캐닝 장치를 포함하는 자동차를 설명하기 위한 개념도이다.
도 10은 본 발명의 실시 예에 의한 스캐닝 장치의 동작 방법을 설명하기 위한 흐름도이다.
본 명세서에 개시되어 있는 본 발명의 개념에 따른 실시 예들에 대해서 특정한 구조적 또는 기능적 설명은 단지 본 발명의 개념에 따른 실시 예들을 설명하기 위한 목적으로 예시된 것으로서, 본 발명의 개념에 따른 실시 예들은 다양한 형태들로 실시될 수 있으며 본 명세서에 설명된 실시 예들에 한정되지 않는다.
본 발명의 개념에 따른 실시 예들은 다양한 변경들을 가할 수 있고 여러 가지 형태들을 가질 수 있으므로 실시 예들을 도면에 예시하고 본 명세서에서 상세하게 설명하고자 한다. 그러나, 이는 본 발명의 개념에 따른 실시 예들을 특정한 개시 형태들에 대해 한정하려는 것이 아니며, 본 발명의 사상 및 기술 범위에 포함되는 모든 변경, 균등물, 또는 대체물을 포함한다.
제1 또는 제2 등의 용어는 다양한 구성 요소들을 설명하는데 사용될 수 있지만, 상기 구성 요소들은 상기 용어들에 의해 한정되어서는 안 된다. 상기 용어들은 하나의 구성 요소를 다른 구성 요소로부터 구별하는 목적으로만, 예컨대 본 발명의 개념에 따른 권리 범위로부터 벗어나지 않은 채, 제1구성 요소는 제2구성 요소로 명명될 수 있고 유사하게 제2구성 요소는 제1구성 요소로도 명명될 수 있다.
어떤 구성 요소가 다른 구성 요소에 "연결되어" 있다거나 "접속되어" 있다고 언급된 때에는, 그 다른 구성 요소에 직접적으로 연결되어 있거나 또는 접속되어 있을 수도 있지만, 중간에 다른 구성 요소가 존재할 수도 있다고 이해되어야 할 것이다. 반면에, 어떤 구성 요소가 다른 구성 요소에 "직접 연결되어" 있다거나 "직접 접속되어" 있다고 언급된 때에는 중간에 다른 구성 요소가 존재하지 않는 것으로 이해되어야 할 것이다. 구성 요소들 간의 관계를 설명하는 다른 표현들, 즉 "~사이에"와 "바로 ~사이에" 또는 "~에 이웃하는"과 "~에 직접 이웃하는" 등도 마찬가지로 해석되어야 한다.
본 명세서에서 사용한 용어는 단지 특정한 실시 예를 설명하기 위해 사용된 것으로서, 본 발명을 한정하려는 의도가 아니다. 단수의 표현은 문맥상 명백하게 다르게 뜻하지 않는 한, 복수의 표현을 포함한다. 본 명세서에서, "포함하다" 또는 "가지다" 등의 용어는 본 명세서에 기재된 특징, 숫자, 단계, 동작, 구성 요소, 부분품 또는 이들을 조합한 것이 존재함을 지정하려는 것이지, 하나 또는 그 이상의 다른 특징들이나 숫자, 단계, 동작, 구성 요소, 부분품 또는 이들을 조합한 것들의 존재 또는 부가 가능성을 미리 배제하지 않는 것으로 이해되어야 한다.
다르게 정의되지 않는 한, 기술적이거나 과학적인 용어를 포함해서 여기서 사용되는 모든 용어들은 본 발명이 속하는 기술 분야에서 통상의 지식을 가진 자에 의해 일반적으로 이해되는 것과 동일한 의미를 나타낸다. 일반적으로 사용되는 사전에 정의되어 있는 것과 같은 용어들은 관련 기술의 문맥상 가지는 의미와 일치하는 의미를 갖는 것으로 해석되어야 하며, 본 명세서에서 명백하게 정의하지 않는 한, 이상적이거나 과도하게 형식적인 의미로 해석되지 않는다.
본 명세서에서 모듈(module)이라 함은 본 발명의 실시 예에 따른 방법을 수행하기 위한 하드웨어 또는 상기 하드웨어를 구동할 수 있는 소프트웨어의 기능적 또는 구조적 결합을 의미할 수 있다. 따라서, 상기 모듈은 프로그램 코드와 상기 프로그램 코드를 수행할 수 있는 하드웨어 리소스(resource)의 논리적 단위 또는 집합을 의미할 수 있으며, 반드시 물리적으로 연결된 코드를 의미하거나 한 종류의 하드웨어를 의미하는 것은 아니다.
이하, 본 명세서에 첨부된 도면들을 참조하여 본 발명의 실시 예들을 상세히 설명한다.
도 1은 본 발명의 실시 예에 따른 스캐닝 시스템의 개략적인 개념도이다.
도 1을 참조하면, 본 발명의 스캐닝 시스템(10)은 스캐닝 장치(100)와 피사체(200)를 포함한다.
스캐닝 장치(100)는 레이저광(LS)을 피사체(200)에 조사하고, 피사체(200)로부터 반사된 레이저광(RLS)을 이용하여 삼차원 이미지 영상을 생성할 수 있다.
예컨대, 레이저광(LS)은 펄스 또는 변조된 연속파 광원일 수 있다.
실시 예에 따라, 스캐닝 장치(100)는 고정형 통합 검출기 기반의 비회전형 검출 시스템 방식을 적용한 레이저 레이더 시스템으로 구현될 수 있다. 상기 레이저 레이더 시스템으로 구현된 스캐닝 장치(100)는 먼저 레이저광(LS)을 피사체(200)로 조사하고, 수광 광학계 및 대면적 수광소자를 이용하여 반사된 레이저광(RLS)을 검출할 수 있다. 검출된 레이저광의 세기와 반사 시간에 대한 정보는 신호처리 과정을 거쳐서 삼차원 이미지 영상으로 구현될 수 있다.
레이저 레이더 시스템으로 구현된 스캐닝 장치(100)는 고속의 고해상도 삼차원 영상을 얻는데 매우 유리하며, 생성된 삼차원 이미지 영상의 프레임 레이트, 펄스 레이저의 동작 주파수 등을 변경하여 가변적으로 구동할 수 있다.
또한, 레이저 레이더 시스템으로 구현된 스캐닝 장치(100)는 광에너지를 조사하는 송신모듈 및 반사된 광에너지를 수신하는 수신 모듈(130)을 픽셀 수준으로 정렬할 필요가 없기 때문에, 다양한 송수신 구조를 가질 수 있다. 따라서, 레이저 레이더 시스템으로 구현된 스캐닝 장치(100)는 다양한 애플리케이션의 요구에 따른 기술적 변형 및 응용성이 매우 높다.
도 2는 본 발명의 실시 예에 따른 스캐닝 장치의 블록도이다.
도 2를 참조하면, 본 발명의 실시 예에 따른 스캐닝 장치(100)는 송신 모듈(120), 수신 모듈(130), 및 신호 처리모듈(110)을 포함한다.
송신 모듈(120)은 피사체(200)를 복수의 이미지 영역들로 분할하고, 이미지 영역들 상에서 인터레이스(interlaced) 방식에 의해 레이저광(LS)을 조사할 수 있다.
예컨대, 송신 모듈(120)은 복수의 이미지 영역들의 일측에서 타측으로 제1 방향의 제1 경로를 따라 레이저광(LS)을 조사할 수 있고, 타측에서 다시 일측으로 제1 방향과 반대 방향의 제2 경로를 따라 레이저광(LS)을 조사할 수 있다. 이때, 제1 경로와 제2 경로는 중첩되지 않고, 송신 모듈(120)은 제1 경로가 종료된 지점부터 연속하여 제2 경로를 따라 레이저광(LS)을 조사할 수 있다.
실시 예에 따라, 제1 경로와 제2 경로는 제1 방향과 수직한 방향을 따라 일정 간격을 두고 평행하게 배치될 수 있다.
다른 실시 예에 따라, 송신 모듈(120)은 복수의 이미지 영역들 상에서 비선형성을 갖는 경로를 따라 중단없이 연속으로 레이저광(LS)을 조사할 수 있다.
본 발명의 실시 예에 따른 송신 모듈(120)은 싱글 패턴 스캐닝이 아닌 듀얼(dual) 패턴 스캐닝을 적용하여 스캐너의 양방향 왕복 진행(round trip)을 구현할 수 있다. 따라서, 본 발명의 실시 예에 따른 스캐닝 장치(100)는 양방향 왕복 진행을 구현하는 송신 모듈(120)에 의해 스캐닝 소비 및 단절을 막을 수 있으며, 두 배의 속도를 갖는 삼차원 영상 데이터를 획득할 수 있다.
수신 모듈(130)은 피사체(200)로부터 반사된 레이저광(RLS)을 수신할 수 있다.
예컨대, 수신 모듈(130)은 수광 광학계, 대면적 수광소자 등을 이용하여 반사된 레이저광(RLS)을 검출할 수 있다.
신호 처리모듈(110)은 TOF(Time of Flight) 기술을 이용하여 검출된 레이저광을 기초로 서브 프레임들을 생성할 수 있다.
예컨대, 송신 모듈(120)은 복수의 이미지 영역들 상에서 인터레이스 방식에 의해 레이저광(LS)을 다양한 경로들로 조사할 수 있고, 신호 처리모듈(110)은 다양한 경로들 각각을 따라 반사된 레이저광(RLS)을 기초로 서브 프레임을 생성할 수 있다.
신호 처리모듈(110)은 하나의 피사체(200)에 대해 생성된 서브 프레임들을 오버래핑(overlapping)하여 피사체(200)의 형상에 대한 단일의 삼차원 이미지 영상을 생성할 수 있다.
도 3은 본 발명의 실시 예에 따른 복수의 이미지 영역을 설명하기 위한 개념도이고, 도 4a는 본 발명의 실시 예에 따른 제1 스캔 경로를 따라 레이저광을 조사하는 방법을 설명하기 위한 개념도이고, 도 4b는 본 발명의 실시 예에 따른 제2 스캔 경로를 따라 레이저광을 조사하는 방법을 설명하기 위한 개념도이고, 도 4c는 도 4a 및 도 4b에 도시된 제1 스캔 경로와 제2 스캔 경로에 따라 레이저광을 조사하는 스캐닝 장치의 동작방법을 설명하기 위한 개념도이다.
도 3을 참조하면, 송신 모듈(120)은 피사체(200)를 복수의 이미지 영역들(AR1 내지 ARn)로 분할할 수 있다.
도 3에 도시된 피사체(200)는 사각 평면의 형상으로 도시되었지만, 이는 본 발명의 설명의 편의를 위한 것이고, 본 발명의 실시 예에 따른 송신 모듈(120)은 다양한 형상의 피사체(200)를 복수의 이미지 영역들(AR1 내지 ARn)로 분할할 수 있다.
복수의 이미지 영역들(AR1 내지 ARn) 각각은 서로 같은 크기의 영역을 포함할 수 있다.
실시 예에 따라, 복수의 이미지 영역들(AR1 내지 ARn) 각각은 x축 방향을 따라 평행하게 배치되거나, y축 방향을 따라 평행하게 배치될 수 있다.
다른 실시 예에 따라, 복수의 이미지 영역들(AR1 내지 ARn) 각각은 격자 형태로 배치될 수 있다.
송신 모듈(120)은 복수의 이미지 영역들(AR1 내지 ARn) 상에서 레이저광(LS)을 조사할 수 있다.
실시 예에 따라, 송신 모듈(120)은 중첩되지 않는 경로를 따라 상기 복수의 이미지 영역들(AR1 내지 ARn)에 레이저광(LS)을 조사할 수 있다.
도 4a를 참조하면, 송신 모듈(120)이 피사체(200)에 대한 복수의 이미지 영역들(AR1 내지 ARn) 상에서 인터레이스(interlaced) 방식에 의해 제1 스캔 경로(DI1)를 따라 레이저광(LS)을 조사할 수 있다.
제1 스캔 경로(DI1)는 교번적으로 반복되는 제1 경로와 제2 경로를 포함할 수 있다. 여기서, 제1 경로는 피사체(200)의 좌측 모서리부터 +x축 방향을 따라 피사체(200)의 우측 모서리까지의 진행경로를 의미할 수 있고, 제2 경로는 피사체(200)의 우측 모서리부터 -x축 방향을 따라 피사체(200)의 좌측 모서리까지의 진행경로를 의미할 수 있다.
즉, 송신 모듈(120)은 교번적으로 반복되는 제1 경로와 제2 경로를 따라 레이저광(LS)을 조사할 수 있으며, 제1 경로와 제2 경로 사이의 경로에 연속적으로 레이저광(LS)을 조사하여 스캐닝의 단절을 막을 수 있다.
실시 예에 따라, 제1 스캔 경로(DI1)에 포함된 제1 경로와 제2 경로는 제1 간격(d1)을 두고 교번적으로 배치될 수 있다. 이때, 제1 스캔 경로(DI1)에 포함된 제1 경로와 제2 경로는 중첩되지 않는다.
구체적으로, 송신 모듈(120)은 제1 스캔 시작지점(IP1)부터 +x축 방향을 따라 피사체(200)의 우측 모서리까지 레이저광(LS)을 조사하고(제1 경로), -y축 방향을 따라 제1 간격(d1)만큼 떨어진 제1 지점까지 레이저광(LS)을 조사하고, 제1 지점부터 -x축 방향을 따라 피사체(200)의 좌측 모서리까지 레이저광(LS)을 조사할 수 있다(제2 경로).
이와 같은 방식으로 송신 모듈(120)은 제1 스캔 시작지점(SP1)부터 제1 스캔 종료지점(EP1)까지 레이저광(LS)을 조사할 수 있다.
송신 모듈(120)이 제1 스캔 경로(DI1)를 따라 레이저광(LS)을 조사하면 피사체(200)로부터 제1 스캔 경로(DI1)를 따라 레이저광(LS)이 반사되고, 신호 처리모듈(110)은 제1 스캔 경로(DI1)를 따라 반사된 레이저광(RLS)을 이용하여 제1 서브 프레임을 생성할 수 있다.
즉, 본 발명의 실시 예에 의한 스캐닝 장치(100)는 제1 스캔 경로(DI1)와 상응하는 피사체(200)의 형상에 대한 제1 서브 프레임을 생성할 수 있다.
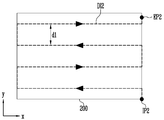
도 4b를 참조하면, 송신 모듈(120)이 피사체(200)에 대한 복수의 이미지 영역들(AR1 내지 ARn) 상에서 인터레이스(interlaced) 방식에 의해 제2 스캔 경로(DI2)를 따라 레이저광(LS)을 조사할 수 있다.
제2 스캔 경로(DI2)는 교번적으로 반복되는 제1 경로와 제2 경로를 포함할 수 있다. 송신 모듈(120)은 제1 스캔 경로(DI1)와 마찬가지로 제2 스캔 경로(DI2)를 따라 교번적으로 반복되는 제1 경로와 제2 경로에 레이저광(LS)을 조사할 수 있으며, 제1 경로와 제2 경로 사이의 경로에 연속적으로 레이저광(LS)을 조사하여 스캐닝의 단절을 막을 수 있다.
실시 예에 따라, 제2 스캔 경로(DI2)에 포함된 제1 경로와 제2 경로는 제1 간격(d1)을 두고 교번적으로 배치될 수 있다. 이때, 제2 스캔 경로(DI2)에 포함된 제1 경로와 제2 경로는 중첩되지 않는다.
구체적으로, 송신 모듈(120)은 제2 스캔 시작지점(IP2)부터 +y축 방향을 따라 제2 간격(d2)만큼 떨어진 제2 지점까지 레이저광(LS)을 조사하고, x축 방향을 따라 피사체(200)의 좌측 모서리까지 레이저광(LS)을 조사하고(제2 경로), +y축 방향을 따라 제1 간격(d1)만큼 떨어진 제3 지점까지 레이저광(LS)을 조사하고, +x축 방향을 따라 피사체(200)의 우측 모서리까지 레이저광(LS)을 조사할 수 있다(제1 경로).
이와 같은 방식으로 송신 모듈(120)은 제2 스캔 시작지점(SP2)부터 제2 스캔 종료 지점(EP2)까지 제1 경로 및 제2 경로를 따라 레이저광(LS)을 조사할 수 있다.
송신 모듈(120)이 제2 스캔 경로(DI2)를 따라 레이저광(LS)을 조사하면 피사체(200)로부터 제2 스캔 경로(DI2)를 따라 레이저광(LS)이 반사되고, 신호 처리모듈(110)은 제2 스캔 경로(DI2)를 따라 반사된 레이저광(RLS)을 이용하여 제2 서브 프레임을 생성할 수 있다.
즉, 본 발명의 실시 예에 의한 스캐닝 장치(100)는 제2 스캔 경로(DI2)와 상응하는 피사체(200)의 형상에 대한 제2 서브 프레임을 생성할 수 있다.
도 4c를 참조하면, 송신 모듈(120)이 도 4a에 도시된 제1 스캔 경로(DI1)와 도 4b에 도시된 제2 스캔 경로(DI2)를 따라 연속적으로 레이저광(LS)을 조사할 수 있다.
송신 모듈(120)은 제1 스캔 경로(DI1)에 포함된 제1 경로와 제2 경로를 따라 제1 스캔 시작지점(IP1)부터 제1 스캔 종료지점(EP1)까지 레이저광(LS)을 조사하고, 제2 스캔 경로(DI1)에 포함된 제1 경로와 제2 경로를 따라 제2 스캔 시작지점(IP2)부터 제2 스캔 종료지점(EP2)까지 레이저광(LS)을 조사할 수 있다.
이때, 제1 스캔 종료지점(EP1)과 제2 스캔 시작지점(IP2)이 동일하기 때문에, 송신 모듈(120)은 제1 스캔 경로(DI1)를 따라 레이저광(LS)을 조사한 후에 연속적으로 제2 스캔 경로(DI2)에 레이저광(LS)을 조사할 수 있다.
제1 스캔 경로(DI1)의 제1 경로 및 제2 경로는 제2 스캔 경로(DI2)의 제1 경로 및 제2 경로와 중첩되지 않도록 배치될 수 있다.
예컨대, 제1 스캔 경로(DI1)의 제1 경로는 제1 이미지 영역(AR1), 제5 이미지 영역(AR5), 및 제9 이미지 영역(AR9)에 포함될 수 있고, 제1 스캔 경로(DI1)의 제2 경로는 제3 이미지 영역, 제7 이미지 영역에 포함될 수 있다.
예컨대, 제2 스캔 경로(DI2)의 제1 경로는 제2 이미지 영역(AR2) 및 제6 이미지 영역(AR6)에 포함될 수 있고, 제2 스캔 경로(DI2)의 제2 경로는 제4 이미지 영역(AR4) 및 제8 이미지 영역(AR8)에 포함될 수 있다.
또한, 제1 스캔 경로(DI1)의 제1 경로와 제2 경로는 제2 스캔 경로(DI2)의 제1 경로의 제2 경로와 같은 간격으로 배치될 수 있다.
예컨대, 제1 스캔 경로(DI1)의 제1 경로와 제2 경로 각각은 제1 간격(d1)을 두고 배치될 수 있고, 제2 스캔 경로(DI2)의 제1 경로와 제2 경로 각각은 제1 간격(d1)을 두고 배치될 수 있다.
그리고, 제2 스캔 경로(DI2)의 제1 경로와 제2 경로 각각은 제1 스캔 경로(DI1)의 제1 경로 및 제2 경로의 사이에 제2 간격(d2)을 두고 배치될 수 있다.
신호 처리모듈(110)은 제1 서브 프레임과 제2 서브 프레임을 오버래핑(overlapping)하여 피사체(200) 형상에 대한 단일의 삼차원 이미지 영상을 생성할 수 있다.
즉, 제1 서브 프레임과 제2 서브 프레임 각각은 피사체(200) 형상의 일부만을 반영한 이미지 영상이므로, 신호 처리모듈(110)은 제1 서브 프레임과 제2 서브 프레임을 오버래핑하여 전체 피사체(200) 형상을 스캐닝할 수 있다.
본 발명의 실시 예에 의한 스캐닝 장치는 싱글 패턴 스캐닝이 아닌 듀얼(dual) 패턴 스캐닝을 적용하고, 스캐너의 양방향 왕복 진행(round trip)에 의한 이미지 영상을 획득하여 싱글 패턴 스캐닝보다 두 배의 속도로 대상을 스캐닝할 수 있다.
도 4a 내지 도 4c에서 설명된 점프 투 라인 바이 라인(jump to line by line ) 인터레이스 방식은 본 발명의 이해를 돕기 위한 실시 예를 도시한 것일 뿐, 이에 한정되지 않고 다양한 형태의 인터레이스 방식이 이용될 수 있다.
도 5는 본 발명의 다른 실시 예에 따른 스캐닝 장치의 동작 방법을 설명하기 위한 개념도이다.
도 5에 도시된 점프 오버 2 라인(jump over 2 line) 인터레이스 방식은 도 4a, 도 4b, 및 도 4c에 도시된 점프 투 라인 바이 라인(jump to line by line ) 인터레이스 방식과 유사한 기술적 특징을 포함하므로, 중복되는 설명은 생략한다.
도 5를 참조하면, 송신 모듈(120)은 제1 스캔 경로(DI1'), 제2 스캔 경로(DI2'), 및 제3 스캔 경로(DI3')을 따라 연속적으로 레이저광(LS)을 조사할 수 있다.
송신 모듈(120)은 제1 스캔 경로(DI1')를 따라 제1 스캔 지점(P1)부터 제2 스캔 지점(P2)까지 레이저광(LS)을 조사하고, 제2 스캔 경로(DI2')를 따라 제2 스캔 지점(P2)부터 제3 스캔 지점(P3)까지 레이저광(LS)을 조사하고, 제3 스캔 경로(DI3')를 따라 제3 스캔 지점(P3)부터 제4 스캔 지점(P4)까지 레이저광(LS)을 조사할 수 있다.
제1 스캔 경로(DI1'), 제2 스캔 경로(DI2'), 및 제3 스캔 경로(DI3')는 피사체(200) 상에서 일정한 간격을 따라 배치될 수 있다.
예컨대, 제1 스캔 경로(DI1'), 제2 스캔 경로(DI2'), 및 제3 스캔 경로(DI3') 각각은 제1 간격(d1')을 두고 배치될 수 있다. 또한, 제1 스캔 경로(DI1'), 제2 스캔 경로(DI2'), 및 제3 스캔 경로(DI3') 각각은 인접한 경로와 제2 간격(d2')을 두고 배치될 수 있다.
신호 처리모듈(110)은 제1 스캔 경로(DI1')를 따라 반사된 레이저광(RLS)을 이용하여 제1 서브 프레임을 생성하고, 제2 스캔 경로(DI2')를 따라 반사된 레이저광(RLS)을 이용하여 제2 서브 프레임을 생성하고, 제3 스캔 경로(DI3')를 따라 반사된 레이저광(RLS)을 이용하여 제3 서브 프레임을 생성할 수 있다.
신호 처리모듈(110)은 제1 서브 프레임, 제2 서브 프레임, 및 제3 서브 프레임을 오버래핑(overlapping)하여 피사체(200) 형상에 대한 단일의 삼차원 이미지 영상을 생성할 수 있다.
즉, 제1 서브 프레임, 제2 서브 프레임, 제3 서브 프레임 각각은 피사체(200) 형상의 일부만을 반영한 이미지 영상이므로, 신호 처리모듈(110)은 제1 서브 프레임, 제2 서브 프레임, 및 제3 서브 프레임을 오버래핑하여 전체 피사체(200) 형상을 스캐닝할 수 있다.
본 발명의 설명의 편의를 위해 제1 스캔 경로(DI1'), 제2 스캔 경로(DI2'), 및 제3 스캔 경로(DI3') 순서로 레이저광(LS)을 조사하는 방법을 도시하였으나, 이는 일실시 예일 뿐, 제1 스캔 경로(DI1'), 제2 스캔 경로(DI2'), 및 제3 스캔 경로(DI3')에 레이저광(LS)을 조사하는 순서는 다양하게 변경되어 실시될 수 있다.
도 6은 본 발명의 또 다른 실시 예에 따른 스캐닝 장치의 동작 방법을 설명하기 위한 개념도이다.
도 6에 도시된 점프 오버 3 라인(jump over 3 line) 인터레이스 방식은 도 4a, 도 4b, 및 도 4c에 도시된 점프 투 라인 바이 라인(jump to line by line ) 인터레이스 방식과 유사한 기술적 특징을 포함하므로, 중복되는 설명은 생략한다.
도 6을 참조하면, 송신 모듈(120)은 제1 스캔 경로(DI1''), 제2 스캔 경로(DI2''), 제3 스캔 경로(DI3''), 및 제4 스캔 경로(DI4'')을 따라 연속적으로 레이저광(LS)을 조사할 수 있다.
송신 모듈(120)은 제1 스캔 경로(DI1'')를 따라 제1 스캔 지점(P1')부터 제2 스캔 지점(P2')까지 레이저광(LS)을 조사하고, 제2 스캔 경로(DI2'')를 따라 제2 스캔 지점(P2')부터 제3 스캔 지점(P3')까지 레이저광(LS)을 조사하고, 제3 스캔 경로(DI3'')를 따라 제3 스캔 지점(P3')부터 제4 스캔 지점(P4')까지 레이저광(LS)을 조사하고, 제4 스캔 경로(DI4'')를 따라 제4 스캔 지점(P4')부터 제5 스캔 지점(P5')까지 레이저광(LS)을 조사할 수 있다.
제1 스캔 경로(DI1''), 제2 스캔 경로(DI2''), 제3 스캔 경로(DI3''), 및 제4 스캔 경로(DI4'')는 피사체(200) 상에서 일정한 간격을 따라 배치될 수 있다.
예컨대, 제1 스캔 경로(DI1''), 제2 스캔 경로(DI2''), 제3 스캔 경로(DI3''), 및 제4 스캔 경로(DI4'') 각각은 제1 간격(d1'')을 두고 배치될 수 있다. 또한, 제1 스캔 경로(DI1'), 제2 스캔 경로(DI2'), 및 제3 스캔 경로(DI3') 각각은 인접한 경로와 제2 간격(d2'')을 두고 배치될 수 있다.
신호 처리모듈(110)은 제1 스캔 경로(DI1'')를 따라 반사된 레이저광(RLS)을 이용하여 제1 서브 프레임을 생성하고, 제2 스캔 경로(DI2'')를 따라 반사된 레이저광(RLS)을 이용하여 제2 서브 프레임을 생성하고, 제3 스캔 경로(DI3'')를 따라 반사된 레이저광(RLS)을 이용하여 제3 서브 프레임을 생성하고, 제4 스캔 경로(DI4'')를 따라 반사된 레이저 광을 이용하여 제4 서브 프레임을 생성할 수 있다.
신호 처리모듈(110)은 제1 서브 프레임, 제2 서브 프레임, 제3 서브 프레임, 및 제4 서브 프레임을 오버래핑(overlapping)하여 피사체(200) 형상에 대한 단일의 삼차원 이미지 영상을 생성할 수 있다.
즉, 제1 서브 프레임, 제2 서브 프레임, 제3 서브 프레임, 및 제4 서브 프레임 각각은 피사체(200) 형상의 일부만을 반영한 이미지 영상이므로, 신호 처리모듈(110)은 제1 서브 프레임, 제2 서브 프레임, 제3 서브 프레임, 및 제4 서브 프레임을 오버래핑하여 전체 피사체(200) 형상을 스캐닝할 수 있다.
본 발명의 설명의 편의를 위해 제1 스캔 경로(DI1''), 제2 스캔 경로(DI2''), 제3 스캔 경로(DI3''), 및 제4 스캔 경로(DI4'') 순서로 레이저광(LS)을 조사하는 방법을 도시하였으나, 이는 일실시 예일 뿐, 제1 스캔 경로(DI1''), 제2 스캔 경로(DI2''), 제3 스캔 경로(DI3''), 및 제4 스캔 경로(DI4'')에 레이저광(LS)을 조사하는 순서는 다양하게 변경되어 실시될 수 있다.
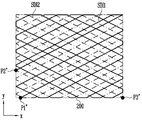
도 7은 본 발명의 또 다른 실시 예에 따른 스캐닝 장치의 동작 방법을 설명하기 위한 개념도이다.
도 7에 도시된 스트립 라인(strip line) 인터레이스 방식은 도 4a, 도 4b, 및 도 4c에 도시된 점프 투 라인 바이 라인(jump to line by line ) 인터레이스 방식과 유사한 기술적 특징을 포함하므로, 중복되는 설명은 생략한다.
도 7을 참조하면, 송신 모듈(120)은 제1 스트립 스캔 경로(SDI1) 및 제2 스트립 스캔 경로(SDI2)를 따라 연속적으로 레이저광(LS)을 조사할 수 있다.
송신 모듈(120)은 제1 스트립 스캔 경로(SDI1)를 따라 제1 스캔 지점(P1'')부터 제2 스캔 지점(P2'')까지 레이저광(LS)을 조사하고, 제2 스트립 스캔 경로(SDI2)를 따라 제2 스캔 지점(P2'')부터 제3 스캔 지점(P3'')까지 레이저광(LS)을 조사할 수 있다.
신호 처리모듈(110)은 제1 스트립 스캔 경로(SDI1)를 따라 반사된 레이저광(RLS)을 이용하여 제1 서브 프레임을 생성하고, 제2 스트립 스캔 경로(SDI2)를 따라 반사된 레이저광(RLS)을 이용하여 제2 서브 프레임을 생성할 수 있다.
신호 처리모듈(110)은 제1 서브 프레임 및 제2 서브 프레임을 오버래핑(overlapping)하여 피사체(200) 형상에 대한 단일의 삼차원 이미지 영상을 생성할 수 있다.
즉, 제1 서브 프레임 및 제2 서브 프레임 각각은 피사체(200) 형상의 일부만을 반영한 이미지 영상이므로, 신호 처리모듈(110)은 제1 서브 프레임 및 제2 서브 프레임을 오버래핑하여 전체 피사체(200) 형상을 스캐닝할 수 있다.
본 발명의 설명의 편의를 위해 제1 스트립 스캔 경로(SDI1) 및 제2 스트립 스캔 경로(SDI2) 순서로 레이저광(LS)을 조사하는 방법을 도시하였으나, 이는 일실시 예일 뿐, 제1 스트립 스캔 경로(SDI1) 및 제2 스트립 스캔 경로(SDI2)에 레이저광(LS)을 조사하는 순서는 다양하게 변경되어 실시될 수 있다.
도 8의 (a)는 종래의 스캐닝 장치의 싱글 스캐닝 동작을 설명하기 위한 그래프이고, 도 8의 (b)는 본 발명의 실시 예에 따른 스캐닝 장치의 듀얼 스캐닝 동작을 설명하기 위한 그래프이다.
도 8의 (a)를 참조하면, 종래의 스캐닝 장치는 피사체 상에서 제1 방향(P1)으로만 레이저광을 조사할 수 있다.
예컨대, 종래의 스캐닝 장치는 피사체의 일측부터 타측까지 레이저광을 조사한 후, 레이저광의 조사를 중단하고 다시 피사체의 일측부터 레이저광 조사를 시작한다.
종래의 스캐닝 장치는 피사체의 일측에서 타측 방향으로만 레이저광을 조사할 수 있기 때문에, 반복적인 스캐닝 중단이 발생하며 과도한 스캐닝 소비 및 단절이 발생될 수 있다. 따라서, 종래의 스캐닝 장치에 의한 스캐닝 방식은 반복적으로 발생하는 스캐닝 중단때문에 좋지 않은 스캐닝 효율을 갖는다.
도 1, 도 2, 및 도 8의 (b)를 참조하면, 본 발명의 실시 예에 따른 스캐닝 장치(100)는 듀얼 스캐닝(Dual scanning) 방식을 적용하여 피사체(200) 상에서 제1 방향(P1) 및 제2 방향(P2)으로 레이저광(LS)을 조사할 수 있다. 여기서, 제1 방향(P1)은 제2 방향(P2)의 반대 방향을 의미할 수 있다.
예컨대, 송신 모듈(120)은 피사체(200)의 일측에서 타측 방향으로 레이저광(LS)을 조사할 수 있고, 중첩되지 않게 타측에서 다시 일측 방향으로 레이저광(LS)을 조사할 수 있다.
본 발명의 실시 예에 따른 스캐닝 장치는 제1 방향(P1) 및 제2 방향(P2)으로 스캐닝 중단 없이 연속적으로 레이저광(LS)을 조사할 수 있기 때문에, 스캐닝 소비 및 단절을 막을 수 있으며, 종래의 스캐닝 방식보다 두 배 이상의 속도를 갖는 삼차원 영상 데이터를 획득할 수 있다.
도 9의 (a) 및 (b)는 본 발명의 실시 예에 따른 스캐닝 장치를 포함하는 자동차를 설명하기 위한 개념도이다.
도 1, 도 2, 및 도 9의 (a)를 참조하면, 본 발명의 실시 예에 따른 스캐닝 장치는 자동차에 장착되어 스캐닝 동작을 수행할 수 있다.
자동차는 스캐닝 장치(100)를 이용하여 전방향(K1) 및 후방향(K2)에 배치된 피사체들을 동시에 스캐닝할 수 있으며, 고속 주행 중에도 스캐닝 장치를 이용하여 스캐닝 동작을 수행할 수 있다.
도 1, 도 2, 및 도 9의 (b)를 참조하면, 자동차는 스캐닝 장치(100)를 이용하여 제1 방면(R1), 제2 방면(R2), 및 제3 방면(R3)에 배치된 피사체(200)들을 동시에 스캐닝할 수 있다.
실시 예에 따라, 스캐닝 장치가 제1 방면(R1), 제2 방면(R2), 및 제3 방면(R3)으로 스캐닝할 수 있는 범위는 각각 다를 수 있다.
도 9의 (a) 및 (b)에서 설명된 자동차에 포함된 스캐닝 장치의 동작 방법은 본 발명의 설명의 편의를 위한 것으로서 이에 한정되지 않고, 본 발명의 실시 예에 따른 스캐닝 장치는 여러 운송 수단 예컨대 비행기, 오토바이, 자전거 등에 포함되어 스캐닝 동작을 수행할 수 있다.
도 10은 본 발명의 실시 예에 의한 스캐닝 장치의 동작 방법을 설명하기 위한 흐름도이다.
도 1, 도 2 및 도 10을 참조하면, 본 발명의 실시 예에 의한 스캐닝 장치(100)는 피사체(200)를 복수의 이미지 영역들로 분할할 수 있다(S100).
스캐닝 장치(100)는 복수의 이미지 영역들 상에서 인터레이스 방식에 의해 레이저광(LS)을 조사할 수 있다(S110). 스캐닝 장치(100)는 인터레이스 방식에 의해 양방향성 또는 다방향성으로 레이저광(LS)을 복수의 이미지 영역들 상에서 조사할 수 있다.
스캐닝 장치(100)는 피사체(200)로부터 반사된 레이저광(RLS)을 수신할 수 있다(S120).
스캐닝 장치(100)는 반사된 레이저광(RLS)을 기초로 TOF(Time Of Flight) 방식에 의해 피사체(200)의 형상에 대한 이미지 영상을 생성할 수 있다(S130). 이때, 스캐닝 장치(100)는 반사된 레이저광(RLS)에 상응하는 복수의 서브 프레임들을 오버래핑하여 피사체(200)의 형상에 대한 단일의 삼차원 이미지 영상을 생성할 수 있다.
본 발명은 도면에 도시된 실시 예를 참고로 설명되었으나 이는 예시적인 것에 불과하며, 본 기술 분야의 통상의 지식을 가진 자라면 이로부터 다양한 변형 및 균등한 타 실시 예가 가능하다는 점을 이해할 것이다. 따라서, 본 발명의 진정한 기술적 보호 범위는 첨부된 등록청구범위의 기술적 사상에 의해 정해져야 할 것이다.
100: 스캐닝 장치
110: 신호 처리모듈
120: 송신 모듈
130: 수신 모듈
200: 피사체
110: 신호 처리모듈
120: 송신 모듈
130: 수신 모듈
200: 피사체
Claims (15)
- 피사체를 복수의 이미지 영역들로 분할하고, 상기 이미지 영역들 상에서 인터레이스(interlaced) 방식에 의해 레이저광을 조사하는 송신 모듈;
상기 피사체로부터 반사된 레이저광을 수신하는 수신 모듈; 및
상기 반사된 레이저광을 기초로 TOF(Time Of Flight) 기술에 의해 상기 피사체의 형상을 스캔하는 신호 처리모듈을 포함하고,
상기 신호 처리모듈은 상기 인터레이스 방식에 의해 생성된 서브 프레임들을 오버래핑(overlapping)하여 상기 피사체의 형상에 대한 단일의 이미지 영상을 생성하는 스캐닝 장치. - 제1항에 있어서,
상기 송신 모듈은 상기 복수의 이미지 영역들 상에서 제1 경로를 따라 상기 레이저광을 조사하고, 상기 제1 경로가 종료된 지점부터 연속하여 상기 제1 경로와 반대 방향의 제2 경로를 따라 상기 레이저광을 조사하는 스캐닝 장치. - 제2항에 있어서,
상기 제1 경로와 제2 경로는 중첩되지 않는 스캐닝 장치. - 제2항에 있어서,
상기 제1 경로와 상기 제2 경로는 상기 복수의 이미지 영역들 상에서 일정한 간격을 두고 교번적으로 배치된 스캐닝 장치. - 제2항에 있어서, 상기 신호 처리모듈은,
상기 제1 경로를 따라 반사된 상기 레이저광을 이용하여 제1 서브 프레임을 생성하고,
상기 제2 경로를 따라 반사된 상기 레이저광을 이용하여 제2 서브 프레임을 생성하는 스캐닝 장치. - 제5항에 있어서,
상기 신호 처리모듈은 상기 제1 서브 프레임과 상기 제2 서브 프레임을 오버래핑하여 상기 단일의 이미지 영상을 생성하는 스캐닝 장치. - 제1항에 있어서,
상기 단일의 이미지 영상은 삼차원 이미지 영상인 스캐닝 장치. - 피사체를 복수의 이미지 영역들로 분할하는 단계;
상기 복수의 이미지 영역들 상에서 인터레이스 방식에 의해 레이저광을 조사하는 단계;
상기 피사체로부터 반사된 레이저광을 수신하는 단계; 및
상기 반사된 레이저광을 기초로 TOF(Time Of Flight) 기술에 의해 상기 피사체의 형상에 대한 이미지 영상을 생성하는 단계를 포함하는 스캐닝 장치의 동작 방법. - 제8항에 있어서,
상기 이미지 영상은 삼차원 이미지 영상인 스캐닝 장치의 동작 방법. - 제8항에 있어서, 상기 레이저광을 조사하는 단계는,
상기 복수의 이미지 영역들 중 제1 이미지 영역 상에서 제1 경로를 따라 상기 레이저광을 조사하고,
상기 복수의 이미지 영역들 중 나머지에서 상기 제1 경로와 일정한 간격을 두고 떨어진 제2 경로를 따라 상기 레이저광을 조사하는 스캐닝 장치의 동작 방법. - 제10항에 있어서,
상기 제1 경로가 종료되는 지점은 상기 제2 경로가 시작되는 지점과 동일한 스캐닝 장치의 동작 방법. - 제10항에 있어서,
상기 제1 경로의 진행방향과 상기 제2 경로의 진행방향은 서로 반대인 스캐닝 장치의 동작 방법. - 제10항에 있어서,
상기 제1 경로의 진행방향과 상기 제2 경로의 진행방향으로 서로 평행한 스캐닝 장치의 동작 방법. - 제10항에 있어서, 상기 이미지 영상을 생성하는 단계는,
상기 제1 경로를 따라 상기 반사된 레이저광을 기초로 제1 서브 프레임을 생성하고,
상기 제2 경로를 따라 상기 반사된 레이저광을 기초로 제2 서브 프레임을 생성하고,
상기 제1 서브 프레임과 상기 제2 서브 프레임을 오버래핑하여 단일의 상기 이미지 영상을 생성하는 스캐닝 장치의 동작 방법. - 제8항에 있어서, 상기 레이저광을 조사하는 단계는,
상기 복수의 이미지 영역들 상에서 양방향성 왕복 진행(round trip) 경로를 따라 상기 레이저광을 조사하는 스캐닝 장치의 동작 방법.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020160028498A KR20170105701A (ko) | 2016-03-09 | 2016-03-09 | 스캐닝 장치 및 이의 동작 방법 |
| US15/208,577 US20170264878A1 (en) | 2016-03-09 | 2016-07-12 | Scanning device and operating method thereof |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020160028498A KR20170105701A (ko) | 2016-03-09 | 2016-03-09 | 스캐닝 장치 및 이의 동작 방법 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20170105701A true KR20170105701A (ko) | 2017-09-20 |
Family
ID=59788084
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020160028498A Withdrawn KR20170105701A (ko) | 2016-03-09 | 2016-03-09 | 스캐닝 장치 및 이의 동작 방법 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US20170264878A1 (ko) |
| KR (1) | KR20170105701A (ko) |
Family Cites Families (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5988862A (en) * | 1996-04-24 | 1999-11-23 | Cyra Technologies, Inc. | Integrated system for quickly and accurately imaging and modeling three dimensional objects |
| US6420698B1 (en) * | 1997-04-24 | 2002-07-16 | Cyra Technologies, Inc. | Integrated system for quickly and accurately imaging and modeling three-dimensional objects |
| US7308112B2 (en) * | 2004-05-14 | 2007-12-11 | Honda Motor Co., Ltd. | Sign based human-machine interaction |
| US8009871B2 (en) * | 2005-02-08 | 2011-08-30 | Microsoft Corporation | Method and system to segment depth images and to detect shapes in three-dimensionally acquired data |
| JP2011013400A (ja) * | 2009-07-01 | 2011-01-20 | Funai Electric Co Ltd | プロジェクタ |
| KR101565969B1 (ko) * | 2009-09-01 | 2015-11-05 | 삼성전자주식회사 | 깊이 정보를 추정할 수 있는 방법과 장치, 및 상기 장치를 포함하는 신호 처리 장치 |
| US8648702B2 (en) * | 2010-08-20 | 2014-02-11 | Denso International America, Inc. | Combined time-of-flight and image sensor systems |
| US8681255B2 (en) * | 2010-09-28 | 2014-03-25 | Microsoft Corporation | Integrated low power depth camera and projection device |
| US9196067B1 (en) * | 2013-03-05 | 2015-11-24 | Amazon Technologies, Inc. | Application specific tracking of projection surfaces |
| JP2015010948A (ja) * | 2013-06-28 | 2015-01-19 | キヤノン株式会社 | 物品処理装置、生成方法、およびプログラム |
| US9857472B2 (en) * | 2013-07-02 | 2018-01-02 | Electronics And Telecommunications Research Institute | Laser radar system for obtaining a 3D image |
| US9355334B1 (en) * | 2013-09-06 | 2016-05-31 | Toyota Jidosha Kabushiki Kaisha | Efficient layer-based object recognition |
| CN108919294B (zh) * | 2013-11-20 | 2022-06-14 | 新唐科技日本株式会社 | 测距摄像系统以及固体摄像元件 |
| US9733344B2 (en) * | 2013-11-25 | 2017-08-15 | Electronics And Telecommunications Research Institute | Laser radar apparatus and method for operating thereof |
| JP6264709B2 (ja) * | 2013-12-25 | 2018-01-24 | スタンレー電気株式会社 | 車両用灯具 |
| JP6236745B2 (ja) * | 2014-02-17 | 2017-11-29 | スタンレー電気株式会社 | 車両用灯具 |
| KR102425033B1 (ko) * | 2014-06-27 | 2022-07-25 | 에이엠에스 센서스 싱가포르 피티이. 리미티드. | 구조광 이미징 시스템 및 방법 |
| KR102135177B1 (ko) * | 2014-06-27 | 2020-07-20 | 한국전자통신연구원 | 능동형 이미징 시스템 구현 방법 및 장치 |
| US10078133B2 (en) * | 2014-08-15 | 2018-09-18 | Aeye, Inc. | Method and system for ladar transmission with closed loop feedback control of dynamic scan patterns |
| US20160182891A1 (en) * | 2014-12-22 | 2016-06-23 | Google Inc. | Integrated Camera System Having Two Dimensional Image Capture and Three Dimensional Time-of-Flight Capture With A Partitioned Field of View |
| KR20160126153A (ko) * | 2015-04-22 | 2016-11-02 | 한국전자통신연구원 | 레이저 레이더 또는 다른 장치를 위한 광 스캐너 |
| KR20170116635A (ko) * | 2016-04-11 | 2017-10-20 | 한국전자통신연구원 | 스캐닝 장치 및 이의 작동 방법 |
-
2016
- 2016-03-09 KR KR1020160028498A patent/KR20170105701A/ko not_active Withdrawn
- 2016-07-12 US US15/208,577 patent/US20170264878A1/en not_active Abandoned
Also Published As
| Publication number | Publication date |
|---|---|
| US20170264878A1 (en) | 2017-09-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN108226899B (zh) | 激光雷达及其工作方法 | |
| JP6111617B2 (ja) | レーザレーダ装置 | |
| JP5541410B2 (ja) | レーザレーダ装置 | |
| CN109581360B (zh) | 用于光检测和测距的装置和方法 | |
| JP2002323561A (ja) | 距離プロフィール定量装置 | |
| US12072417B2 (en) | Sub-sweep sampling in a lidar system | |
| KR20190099322A (ko) | 고주파수 펄스 파이어링을 사용하는 고분해능 lidar | |
| KR102275104B1 (ko) | 전자파 검출 장치, 프로그램, 및 정보 취득 시스템 | |
| JP2015179078A (ja) | 視差演算システム及び距離測定装置 | |
| CN107621242B (zh) | 记录距离轮廓的装置及方法 | |
| US20190011539A1 (en) | Light Projecting/Reception Unit And Radar | |
| KR102845981B1 (ko) | 광학 장치 및 이를 포함하는 라이다 시스템 | |
| EP2383544A1 (en) | Optical encoder | |
| DE102016002441B3 (de) | Mechanisch robustes optisches Messsystem mittels Lichtlaufzeit- und/oder Reflektivitätsmessung | |
| CN108226904A (zh) | 一种激光雷达及其激光脉冲时序调整方法 | |
| JP7157385B2 (ja) | 走査型の光学系及びレーザーレーダー装置 | |
| JP6318663B2 (ja) | レーザレーダ装置 | |
| US4591726A (en) | Optical fault seeking apparatus for webs | |
| US20060092004A1 (en) | Optical sensor | |
| US20170293020A1 (en) | Scanning device and operating method thereof | |
| EP3757605B1 (en) | Measuring device, control method, program, and storage medium | |
| JPWO2018147454A1 (ja) | 走査型の光学系及びレーザーレーダー装置 | |
| JP2005077288A (ja) | レーダ装置 | |
| KR20170105701A (ko) | 스캐닝 장치 및 이의 동작 방법 | |
| KR100402341B1 (ko) | 광학식 기호 판독 장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
Patent event code: PA01091R01D Comment text: Patent Application Patent event date: 20160309 |
|
| PG1501 | Laying open of application | ||
| PC1203 | Withdrawal of no request for examination |