KR20170115568A - 무시할 수 있는 공통 모드 전압을 갖는 6 위상 전기적 머신용 드라이브 및 제어 - Google Patents
무시할 수 있는 공통 모드 전압을 갖는 6 위상 전기적 머신용 드라이브 및 제어 Download PDFInfo
- Publication number
- KR20170115568A KR20170115568A KR1020177024668A KR20177024668A KR20170115568A KR 20170115568 A KR20170115568 A KR 20170115568A KR 1020177024668 A KR1020177024668 A KR 1020177024668A KR 20177024668 A KR20177024668 A KR 20177024668A KR 20170115568 A KR20170115568 A KR 20170115568A
- Authority
- KR
- South Korea
- Prior art keywords
- phase
- motor
- drive system
- winding
- common mode
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000004804 winding Methods 0.000 claims abstract description 61
- 238000000034 method Methods 0.000 claims abstract description 5
- 230000007935 neutral effect Effects 0.000 claims description 27
- 239000003990 capacitor Substances 0.000 claims description 17
- 230000003071 parasitic effect Effects 0.000 claims description 14
- 230000000295 complement effect Effects 0.000 claims description 7
- 239000012141 concentrate Substances 0.000 claims description 2
- 239000013598 vector Substances 0.000 description 13
- 239000000969 carrier Substances 0.000 description 4
- 238000010586 diagram Methods 0.000 description 3
- 230000008030 elimination Effects 0.000 description 3
- 238000003379 elimination reaction Methods 0.000 description 3
- 230000005294 ferromagnetic effect Effects 0.000 description 3
- 230000008878 coupling Effects 0.000 description 2
- 238000010168 coupling process Methods 0.000 description 2
- 238000005859 coupling reaction Methods 0.000 description 2
- 238000009826 distribution Methods 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000009471 action Effects 0.000 description 1
- 210000004489 deciduous teeth Anatomy 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000009413 insulation Methods 0.000 description 1
- 230000005291 magnetic effect Effects 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 230000000638 stimulation Effects 0.000 description 1
Images







Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B1/00—Control systems of elevators in general
- B66B1/24—Control systems with regulation, i.e. with retroactive action, for influencing travelling speed, acceleration, or deceleration
- B66B1/28—Control systems with regulation, i.e. with retroactive action, for influencing travelling speed, acceleration, or deceleration electrical
- B66B1/30—Control systems with regulation, i.e. with retroactive action, for influencing travelling speed, acceleration, or deceleration electrical effective on driving gear, e.g. acting on power electronics, on inverter or rectifier controlled motor
- B66B1/306—Control systems with regulation, i.e. with retroactive action, for influencing travelling speed, acceleration, or deceleration electrical effective on driving gear, e.g. acting on power electronics, on inverter or rectifier controlled motor with DC powered elevator drive
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P25/00—Arrangements or methods for the control of AC motors characterised by the kind of AC motor or by structural details
- H02P25/16—Arrangements or methods for the control of AC motors characterised by the kind of AC motor or by structural details characterised by the circuit arrangement or by the kind of wiring
- H02P25/22—Multiple windings; Windings for more than three phases
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P27/00—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage
- H02P27/04—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage
- H02P27/06—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using DC to AC converters or inverters
- H02P27/08—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using DC to AC converters or inverters with pulse width modulation
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Automation & Control Theory (AREA)
- Control Of Ac Motors In General (AREA)
- Inverter Devices (AREA)
Abstract
Description
도 1은 예시적인 실시예에서 멀티카 엘리베이터 시스템을 도시하는 도면;
도 2는 본 발명의 실시예에 다른 6-위상 머신 와인딩 구성을 도시하는 도면;
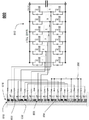
도 3은 본 발명의 실시예에 따른 6-위상 머신과 6-위상 전압원 인버터를 도시하는 도면;
도 4는 본 발명이 또 다른 실시예에 따른 6-위상 머신과 또 다른 6-위상 전압원 인버터를 도시하는 도면;
도 5는 본 발명의 실시예에 따른 6-위상 머신 공간 내의 와인딩의 구성을 도시하는 도면;
도 6은 본 발명의 실시예에 따른 인버터 위상의 그룹에 대한 전압 벡터를 도시하는 도면;
도 7은 본 발명의 실시예에 따른 6-위상 모터에 대한 펄스 폭 변조 생성을 도시하는 도면;
도 8은 예시적인 실시예에서 선형 추진 시스템의 이차 부분 및 일차 부분의 섹션 및 드라이브를 도시하는 도면.


Claims (15)
- 모터 및 드라이브 시스템으로,
하나 이상의 직류원;
하나 이상의 직류원의 포지티브 전력과 네거티브 전력 사이에 스위칭되는 6 위상 인버터;
2개 이상의 와인딩 그룹에 걸쳐 제로 공통 모드 펄스 폭 변조를 발생시키도록 구성된 2개 이상의 와인딩 그룹으로 분할된 6개의 위상 와인딩을 포함하는 6 위상 머신을 포함하는 모터 및 드라이브 시스템. - 제1항에 있어서, 공통 모드 노이즈는 제로 공통 모드 펄스 폭 변조 동안 하나 이상의 기생 캐패시터를 통해 6 위상 머신의 6 위상 와인딩을 통해 그라운드로 전달되는 모터 및 드라이브 시스템.
- 제1항 또는 제2항에 있어서, 6 위상 와인딩은 60°의 공간 차이로 분포되는 모터 및 드라이브 시스템.
- 제1항 내지 제3항 중 어느 한 항에 있어서, 각각의 와인딩 그룹은 3-위상 120° 위상 변위 머신을 형성하는 모터 및 드라이브 시스템.
- 제1항 내지 제4항 중 어느 한 항에 있어서, 6 위상 와인딩은 2개 이상의 개별 중립 연결을 포함하고 최대 변조 지수는 1.15에 근사하는 모터 및 드라이브 시스템.
- 제1항 내지 제5항 중 어느 한 항에 있어서, 와인딩과 그라운드 간의 기생 캐패시턴스는 2개의 개별 중립 연결에 대한 2개의 실질적으로 동일한 공통 모드 캐패시터 또는 공통 중립 연결에 대한 하나의 CM 캐패시터로써 모델링되는 모터 및 드라이브 시스템.
- 제1항, 제2항, 제3항 및 제4항에 있어서, 6 위상 와인딩은 공통 중립 연결을 포함하고 최대 변조 지수는 1인 모터 및 드라이브 시스템.
- 제1항, 제2항, 제3항, 제4항 및 제7항에 있어서, 하나 이상의 기생 캐패시터는 공통 중립 연결로부터 공통 모드 캐패시턴스를 집중시키는 단일의 기생 공통 모드 캐패시터인 모터 및 드라이브 시스템.
- 제1항 내지 제8항 중 어느 한 항에 있어서, 선형 모터 시스템을 구동하도록 구성된 6-위상 전력 컨버터를 추가로 포함하고, 6-위상 전력 컨버터는 6 위상 와인딩의 하나의 위상에 연결된 2개의 스위치의 하나의 위상-레그를 포함하는 모터 및 드라이브 시스템.
- 제9항에 있어서, 6 위상 전력 컨버터는 12개의 스위치를 포함하는 모터 및 드라이브 시스템.
- 제9항에 있어서, 6 위상 전력 컨버터의 스위칭 패턴은 2개 이상의 와인딩 그룹에 대해 배열되는 모터 및 드라이브 시스템.
- 제11항에 있어서, 스위칭 패턴의 스위칭 동작은 0으로 공통 모드 전압을 유지시키기 위하여 2개 이상의 와인딩 그룹에 대해 상보적인 모터 및 드라이브 시스템.
- 제11항에 있어서, 스위칭 패턴은 2개 이상의 와인딩 그룹의 제2 그룹에 대해 스위칭 동작을 생성할 때 2개 이상의 와인딩 그룹의 제1 그룹에 대해 캐리어 및 듀티 사이클을 반전시킴으로써 생성되는 모터 및 드라이브 시스템.
- 제1항 내지 제13항 중 어느 한 항에 있어서, 로프리스 엘리베이터 시스템 내에 포함되는 모터 및 드라이브 시스템.
- 하나 이상의 직류원의 포지티브 전력과 네거티브 전력 사이에 모터 및 드라이브 시스템의 6 위상 인버터에 의한 스위칭 단계; 및
6 위상 인버터에 의한 스위칭에 따라 6 위상 머신에 의해 2개 이상의 와인딩 그룹을 가로질러 제로 공통 모드 펄스 폭 변조를 수행하는 단계 - 6 위상 머신은 2개 이상의 와인딩 그룹으로 분할된 6 위상 와인딩을 포함함 - , 를 포함하는 방법.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201562112272P | 2015-02-05 | 2015-02-05 | |
| US62/112,272 | 2015-02-05 | ||
| PCT/US2016/016308 WO2016126782A1 (en) | 2015-02-05 | 2016-02-03 | Drive and control for six-phase electrical machines with negligible common-mode voltage |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20170115568A true KR20170115568A (ko) | 2017-10-17 |
| KR102587874B1 KR102587874B1 (ko) | 2023-10-11 |
Family
ID=55453270
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020177024668A Active KR102587874B1 (ko) | 2015-02-05 | 2016-02-03 | 무시할 수 있는 공통 모드 전압을 갖는 6 위상 전기적 머신용 드라이브 및 제어 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10773922B2 (ko) |
| EP (2) | EP3254372B1 (ko) |
| KR (1) | KR102587874B1 (ko) |
| CN (1) | CN107223307B (ko) |
| WO (1) | WO2016126782A1 (ko) |
Families Citing this family (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105960370A (zh) * | 2013-12-05 | 2016-09-21 | 奥的斯电梯公司 | 用于具有分布式绕组的线性机的电机驱动器 |
| EP3254372B1 (en) * | 2015-02-05 | 2022-12-28 | Otis Elevator Company | Drive and control for six-phase electrical machines with negligible common-mode voltage |
| US9985566B2 (en) * | 2015-05-29 | 2018-05-29 | Otis Elevator Company | Dual three-phase electrical machine and drive with negligible common-mode noise |
| CN108349703B (zh) * | 2015-08-07 | 2020-12-01 | 奥的斯电梯公司 | 具有冷却装置的电梯线性推进系统 |
| WO2018140744A1 (en) | 2017-01-30 | 2018-08-02 | Carrier Corporation | Paralleled passive front-end rectifiers with and without interleaving |
| CN110463028B (zh) | 2017-01-30 | 2023-04-28 | 开利公司 | 对采用和不采用交织并联无源前端整流器进行控制的方法 |
| US9906183B1 (en) * | 2017-01-30 | 2018-02-27 | Otis Elevator Company | Parallel interleaved 2-level or 3-level regenerative drives |
| CN110011581B (zh) * | 2019-01-28 | 2020-11-24 | 华中科技大学 | 一种非对称六相交流电机共模噪声的抑制方法和系统 |
| US11527942B2 (en) * | 2019-03-27 | 2022-12-13 | National Technology & Engineering Solutions Of Sandia, Llc | Excitation control of dual-wound machines for coupling mitigation |
| DE102019110269A1 (de) * | 2019-04-18 | 2020-10-22 | Bayerische Motoren Werke Aktiengesellschaft | Verfahren zur Ansteuerung einer mehrphasigen elektrischen Maschine mittels Raumzeigermodulation, Steuereinrichtung sowie Antriebsanordnung |
| WO2021016183A1 (en) * | 2019-07-25 | 2021-01-28 | Cummins Inc. | Fault tolerant operations of a six-phase machine |
| JP7608897B2 (ja) * | 2021-03-16 | 2025-01-07 | 株式会社デンソー | 回転電機の制御装置及び回転電機の制御方法 |
| GB2615762A (en) * | 2022-02-16 | 2023-08-23 | Mercedes Benz Group Ag | A method for controlling a six-phase electric motor by a control system |
| DE102022134593A1 (de) * | 2022-12-22 | 2024-06-27 | Seg Automotive Germany Gmbh | Elektrische Maschineneinheit, Fahrzeug und Verfahren zum Betreiben einer elektrischen Maschineneinheit |
| US12537468B2 (en) | 2023-12-01 | 2026-01-27 | Honeywell International Inc. | Remote actuation systems and methods |
| US12473077B2 (en) * | 2024-04-22 | 2025-11-18 | Honeywell International Inc. | Remote actuation systems and related six-phase motor control methods |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20050097945A (ko) * | 2003-01-15 | 2005-10-10 | 지멘스 악티엔게젤샤프트 | 전기 추진 시스템의 공통 모드 간섭전류를 감소시키기 위한방법 및 이에 상응하는 전기 추진 시스템 |
Family Cites Families (31)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3819992A (en) * | 1972-01-21 | 1974-06-25 | Power Control Corp | Method and apparatus for providing efficient and stable power inversion with voltage and frequency control |
| US4511834A (en) * | 1982-12-23 | 1985-04-16 | Borg-Warner Corporation | Control and stabilizing system for damperless synchronous motor |
| JP3399134B2 (ja) * | 1994-12-12 | 2003-04-21 | 株式会社明電舎 | 極数切替電動機の運転制御装置 |
| US5852558A (en) * | 1997-06-20 | 1998-12-22 | Wisconsin Alumni Research Foundation | Method and apparatus for reducing common mode voltage in multi-phase power converters |
| US5905644A (en) * | 1998-07-31 | 1999-05-18 | Allen-Bradley Company, Llc | DC bus voltage controller |
| JP3711956B2 (ja) * | 2002-04-01 | 2005-11-02 | 日産自動車株式会社 | 回転電機の駆動方法 |
| JP4339757B2 (ja) * | 2004-07-12 | 2009-10-07 | 株式会社日立製作所 | 車両用駆動発電システム |
| GB0422201D0 (en) * | 2004-10-07 | 2004-11-03 | Trw Ltd | Motor drive control |
| US7663268B2 (en) * | 2006-08-30 | 2010-02-16 | The Regents of the University of Cailfornia | Converters for high power applications |
| US7990098B2 (en) * | 2007-07-30 | 2011-08-02 | GM Global Technology Operations LLC | Series-coupled two-motor drive using double-ended inverter system |
| US7884562B2 (en) * | 2007-10-26 | 2011-02-08 | Frederick William Klatt | Brushless multiphase self-commutation controller |
| JP4450082B2 (ja) * | 2008-03-10 | 2010-04-14 | トヨタ自動車株式会社 | 電動機駆動装置およびその制御方法 |
| US8415904B2 (en) * | 2010-06-29 | 2013-04-09 | Ac Propulsion, Inc. | Open delta motor drive with integrated recharge |
| JP2014087141A (ja) * | 2012-10-23 | 2014-05-12 | Hitachi Ltd | 回転機およびそのドライブシステム |
| FR3004299B1 (fr) * | 2013-04-05 | 2016-10-28 | Valeo Equip Electr Moteur | Procede et dispositif de commande d'un onduleur polyphase |
| EP2994408A4 (en) * | 2013-05-06 | 2017-01-25 | Otis Elevator Company | Linear motor stator core for self-propelled elevator |
| DE102013208544A1 (de) * | 2013-05-08 | 2014-11-13 | Lenze Drives Gmbh | Antriebssystem |
| US9533638B2 (en) * | 2013-07-18 | 2017-01-03 | The Boeing Company | Aircraft universal power converter |
| FR3015145B1 (fr) * | 2013-12-18 | 2017-07-07 | Thales Sa | Dispositif de conversion de puissance electrique modulaire et reconfigurable |
| US20150349598A1 (en) * | 2014-05-28 | 2015-12-03 | Hamilton Sundstrand Corporation | Multiplex winding synchronous generator |
| JP6501507B2 (ja) * | 2014-06-02 | 2019-04-17 | 株式会社小松製作所 | 回転電機及び回転電機の制御装置 |
| EP3254372B1 (en) * | 2015-02-05 | 2022-12-28 | Otis Elevator Company | Drive and control for six-phase electrical machines with negligible common-mode voltage |
| US9985566B2 (en) * | 2015-05-29 | 2018-05-29 | Otis Elevator Company | Dual three-phase electrical machine and drive with negligible common-mode noise |
| US9893604B2 (en) * | 2015-07-21 | 2018-02-13 | Robert W. Horst | Circuit with low DC bias storage capacitors for high density power conversion |
| US10727774B2 (en) * | 2016-03-11 | 2020-07-28 | General Atomics | Multi-level high-speed adjustable speed drive |
| US10396694B2 (en) * | 2016-03-17 | 2019-08-27 | General Electric Company | System and method for minimizing reactive current to limit rotor modulation index on a power converter |
| CN109417340B (zh) * | 2016-07-04 | 2020-08-11 | 三菱电机株式会社 | 极数切换型旋转电机以及极数切换型旋转电机的驱动方法 |
| US10063161B2 (en) * | 2016-10-18 | 2018-08-28 | Abb Schweiz Ag | Active neutral point clamped converter control system and method |
| CN108233755B (zh) * | 2018-02-12 | 2020-01-31 | 武汉大学 | 一种抑制多相电机共模电压的空间矢量脉宽调制方法 |
| US11239717B2 (en) * | 2018-06-11 | 2022-02-01 | North Carolina State University | AC machine windings |
| US10525843B1 (en) * | 2018-06-19 | 2020-01-07 | Ford Global Technologies, Llc | Common mode current reduction hybrid drive system |
-
2016
- 2016-02-03 EP EP16708001.9A patent/EP3254372B1/en active Active
- 2016-02-03 US US15/549,076 patent/US10773922B2/en active Active
- 2016-02-03 EP EP22215410.6A patent/EP4195498A3/en active Pending
- 2016-02-03 KR KR1020177024668A patent/KR102587874B1/ko active Active
- 2016-02-03 CN CN201680008952.5A patent/CN107223307B/zh active Active
- 2016-02-03 WO PCT/US2016/016308 patent/WO2016126782A1/en not_active Ceased
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20050097945A (ko) * | 2003-01-15 | 2005-10-10 | 지멘스 악티엔게젤샤프트 | 전기 추진 시스템의 공통 모드 간섭전류를 감소시키기 위한방법 및 이에 상응하는 전기 추진 시스템 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP4195498A2 (en) | 2023-06-14 |
| KR102587874B1 (ko) | 2023-10-11 |
| US10773922B2 (en) | 2020-09-15 |
| EP4195498A3 (en) | 2023-08-02 |
| EP3254372A1 (en) | 2017-12-13 |
| WO2016126782A1 (en) | 2016-08-11 |
| EP3254372B1 (en) | 2022-12-28 |
| CN107223307A (zh) | 2017-09-29 |
| CN107223307B (zh) | 2020-12-08 |
| US20180022576A1 (en) | 2018-01-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102587874B1 (ko) | 무시할 수 있는 공통 모드 전압을 갖는 6 위상 전기적 머신용 드라이브 및 제어 | |
| CN106208856B (zh) | 双三相电机和具有可忽略共模噪声的驱动 | |
| EP2999652B1 (en) | Self-propelled elevator with wireless power supply | |
| EP2950440B1 (en) | Pulse-width modulation control of paralleled inverters | |
| EP2950434A1 (en) | Output filter with interphase reactor for paralleled inverters | |
| US9906112B2 (en) | Electromagnetic propulsion system having a wireless power transfer system | |
| EP3104517A2 (en) | Paralleled active front-end rectifiers with negligible common-mode | |
| Umesh et al. | Pole-phase modulated multiphase induction motor drive with reduced torque ripple and improved DC link utilization | |
| US20170057791A1 (en) | Elevator wireless power supply | |
| Umesh et al. | Dual-inverter-fed pole-phase modulated nine-phase induction motor drive with improved performance | |
| US20210135558A1 (en) | Linear motor and transport system using the same | |
| US20180002142A1 (en) | Six-phase motor for elevator system | |
| KR101695091B1 (ko) | 5-레벨 anpc의 공통모드 전압 저감을 위한 svpwm 방법 | |
| US10211676B2 (en) | Electromechanical propulsion system having a wireless power transfer system | |
| EP3210296A1 (en) | Three-level t-type npc power converter | |
| Pramanick et al. | A harmonic suppression scheme for full speed range of a two-level inverter fed induction motor drive using switched capacitive filter | |
| Changizian et al. | Application of Vienna Converter to a double-driven SRMs under one PFC compensator | |
| Goodman et al. | DC side ripple cancellation in a cascaded multi-level topology for automotive applications | |
| Pinkymol et al. | Space vector based field oriented control of Permanent Magnet Synchronous Motor with a 3-level inverter scheme | |
| Iqbal et al. | Two Different Carrier Phase Shifted Space Vector PWM Techniques for Pole Phase Modulation based 9-Phase Induction Motor Drive | |
| Vafakhah | Multilevel space vector PWM for multilevel coupled inductor inverters | |
| CN116982249A (zh) | 长定子直线电机 | |
| KR20170044265A (ko) | 차상 가변전기자 코일로 구동되는 리니어모터 추진 시스템 | |
| Subbamma et al. | Implementation of performance analysis of 18-pulse AC-DC converter fed switched reluctance motor drives to robotics | |
| ML | IMPLEMENTATION OF PERFORMANCE ANALYSIS OF 18-PULSE AC-DC CONVERTER FED SWITCHED RELUCTANCE MOTOR DRIVES TO ROBOTICS |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0105 | International application |
Patent event date: 20170901 Patent event code: PA01051R01D Comment text: International Patent Application |
|
| PG1501 | Laying open of application | ||
| A201 | Request for examination | ||
| PA0201 | Request for examination |
Patent event code: PA02012R01D Patent event date: 20210126 Comment text: Request for Examination of Application |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20230116 Patent event code: PE09021S01D |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
Patent event code: PE07011S01D Comment text: Decision to Grant Registration Patent event date: 20230705 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
Comment text: Registration of Establishment Patent event date: 20231005 Patent event code: PR07011E01D |
|
| PR1002 | Payment of registration fee |
Payment date: 20231006 End annual number: 3 Start annual number: 1 |
|
| PG1601 | Publication of registration |