KR20170115780A - 운전 지원 장치 및 이를 이용한 운전 지원 방법 - Google Patents
운전 지원 장치 및 이를 이용한 운전 지원 방법 Download PDFInfo
- Publication number
- KR20170115780A KR20170115780A KR1020160043408A KR20160043408A KR20170115780A KR 20170115780 A KR20170115780 A KR 20170115780A KR 1020160043408 A KR1020160043408 A KR 1020160043408A KR 20160043408 A KR20160043408 A KR 20160043408A KR 20170115780 A KR20170115780 A KR 20170115780A
- Authority
- KR
- South Korea
- Prior art keywords
- vehicle
- torque value
- control unit
- parking
- condition
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images

Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/06—Automatic manoeuvring for parking
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T8/00—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force
- B60T8/32—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force responsive to a speed condition, e.g. acceleration or deceleration
- B60T8/34—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force responsive to a speed condition, e.g. acceleration or deceleration having a fluid pressure regulator responsive to a speed condition
- B60T8/44—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force responsive to a speed condition, e.g. acceleration or deceleration having a fluid pressure regulator responsive to a speed condition co-operating with a power-assist booster means associated with a master cylinder for controlling the release and reapplication of brake pressure through an interaction with the power assist device, i.e. open systems
- B60T8/441—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force responsive to a speed condition, e.g. acceleration or deceleration having a fluid pressure regulator responsive to a speed condition co-operating with a power-assist booster means associated with a master cylinder for controlling the release and reapplication of brake pressure through an interaction with the power assist device, i.e. open systems using hydraulic boosters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/06—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of combustion engines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/18—Conjoint control of vehicle sub-units of different type or different function including control of braking systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/20—Conjoint control of vehicle sub-units of different type or different function including control of steering systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/02—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to ambient conditions
- B60W40/06—Road conditions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/02—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to ambient conditions
- B60W40/06—Road conditions
- B60W40/076—Slope angle of the road
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/10—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to vehicle motion
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W2050/143—Alarm means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2422/00—Indexing codes relating to the special location or mounting of sensors
- B60W2422/70—Indexing codes relating to the special location or mounting of sensors on the wheel or the tyre
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/18—Braking system
- B60W2510/182—Brake pressure, e.g. of fluid or between pad and disc
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/20—Steering systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/10—Longitudinal speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/28—Wheel speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2530/00—Input parameters relating to vehicle conditions or values, not covered by groups B60W2510/00 or B60W2520/00
- B60W2530/18—Distance travelled
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2552/00—Input parameters relating to infrastructure
- B60W2552/15—Road slope, i.e. the inclination of a road segment in the longitudinal direction
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/06—Combustion engines, Gas turbines
- B60W2710/0666—Engine torque
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/18—Braking system
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/18—Braking system
- B60W2710/182—Brake pressure, e.g. of fluid or between pad and disc
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/20—Steering systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2720/00—Output or target parameters relating to overall vehicle dynamics
- B60W2720/28—Wheel speed
-
- B60W2750/30—
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2754/00—Output or target parameters relating to objects
- B60W2754/10—Spatial relation or speed relative to objects
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2300/00—Purposes or special features of road vehicle drive control systems
- B60Y2300/06—Automatic manoeuvring for parking
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Automation & Control Theory (AREA)
- Physics & Mathematics (AREA)
- Mathematical Physics (AREA)
- Fluid Mechanics (AREA)
- Human Computer Interaction (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Regulating Braking Force (AREA)
Abstract
본 발명의 일 실시예에 따르면, 차량의 주차 또는 출차를 지원하는 운전 지원 장치로서, 미리 설정된 토크값을 엔진제어장치에 인가하여 상기 차량의 주차 또는 출차를 제어 중에 상기 차량의 휠펄스, 차속 및 브레이크 압력을 이용하여 상기 차량의 움직임이 있는지 여부를 판단하고, 판단결과 차량의 움직임이 없는 경우 상기 엔진제어장치에 인가되는 토크값을 증가시키는 전자제어유닛을 포함하는 것을 특징으로 하는 운전 지원 장치가 제공된다.
Description
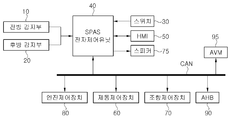
도 2는 본 발명의 일 실시예에 따른 운전 지원 장치를 설명하기 위한 도면, 그리고
도 3은 본 발명의 다른 실시예에 따른 운전 지원 장치를 이용한 운전 지원 방법을 설명하기 위한 동작 흐름도.
30 : 스위치 40 : 전자제어유닛
50 : HMI 60 : 제동제어장치
70 : 조향제어장치 75 : 스피커
80 : 엔진제어장치 90 : AHB
95 : AVM
Claims (11)
- 차량의 주차 또는 출차를 지원하는 운전 지원 장치로서,
미리 설정된 토크값을 엔진제어장치에 인가하여 상기 차량의 주차 또는 출차를 제어 중에 상기 차량의 휠펄스, 차속 및 브레이크 압력을 이용하여 상기 차량의 움직임이 있는지 여부를 판단하고, 판단결과 차량의 움직임이 없는 경우 상기 엔진제어장치에 인가되는 토크값을 증가시키는 전자제어유닛을 포함하는 것을 특징으로 하는 운전 지원 장치. - 청구항 1에 있어서,
상기 전자제어유닛은 차량의 움직임이 없는 경우 상기 차량의 주행로를 경사로로 판정하여 경사로에서 거동을 위한 토크값을 계산하여 상기 엔진제어장치에 인가하는 것을 특징으로 하는 운전 지원 장치. - 청구항 2에 있어서,
상기 전자제어유닛은 상기 휠펄스를 통해 계산된 상기 차량의 이동거리, 미리 설정된 이동거리, 차속 및 미리 설정된 토크값을 이용하여 상기 경사로에서 거동을 위한 토크값을 계산하는 것을 특징으로 하는 운전 지원 장치. - 청구항 1에 있어서,
상기 휠펄스 및 차속은 상기 차량에 설치된 휠센서((Wheel sensor)로부터 수신되고, 상기 브레이크 압력은 상기 차량에 설치된 전동식 유압 부스터(AHB, Active Hydraulic Booster)로부터 수신되는 것을 특징으로 하는 운전 지원 장치. - 청구항 1에 있어서,
상기 전자제어유닛은 상기 휠펄스, 차속 및 브레이크 압력이 미리 정해진 차량미동조건을 만족하는지 여부를 판단하여 차량미동조건을 만족하는 경우 상기 차량의 주행로를 경사로로 판정하고, 차량미동조건을 만족하지 않는 경우 상기 차량의 주행로를 정상로로 판정하는 것을 특징으로 하는 운전 지원 장치. - 청구항 5에 있어서,
상기 차량미동조건은 상기 휠펄스가 수신되는 제 1 조건, 차속이 0인 제 2 조건, 및 브레이크 압력이 기준압력 이상인 제 3 조건을 포함하는 것을 특징으로 하는 운전 지원 장치. - 차량의 주차 또는 출차를 지원하는 운전 지원 장치를 이용한 운전 지원 방법으로서,
상기 차량의 주차 또는 출차를 제어하는 중에 상기 차량의 휠펄스, 차속 및 브레이크 압력을 수신하는 단계;
상기 수신된 휠펄스, 차속 및 브레이크 압력을 미리 정해진 차량미동조건과 비교하여 상기 차량의 움직임이 있는지 여부를 판단하는 단계; 및
상기 판단하는 단계의 판단결과, 상기 차량의 움직임이 없는 경우 엔진제어장치에 인가되는 토크값을 증가시켜 상기 차량의 주차 또는 출차 제어를 수행하는 단계를 포함하는 것을 특징으로 하는 운전 지원 방법. - 청구항 7에 있어서,
상기 수행하는 단계는
상기 휠펄스를 통해 계산된 상기 차량의 이동거리, 미리 설정된 이동거리, 차속 및 미리 설정된 토크값을 이용하여 상기 차량의 거동을 위한 토크값을 계산하는 단계를 포함하고,
상기 계산된 토크값은 미리 설정된 토크값 보다 큰 값인 것을 특징으로 하는 운전 지원 방법. - 청구항 8에 있어서,
상기 수행하는 단계는 상기 차량의 움직임이 있는 경우 미리 설정된 토크값을 상기 엔진제어장치에 인가하고, 상기 차량의 움직임이 없는 경우 상기 계산된 토크값을 상기 엔진제어장치에 인가하는 것을 특징으로 하는 운전 지원 방법. - 청구항 7에 있어서,
상기 차량미동조건은 상기 휠펄스가 수신되는 제 1 조건, 차속이 0인 제 2 조건, 및 브레이크 압력이 기준압력 이상인 제 3 조건을 포함하고,
상기 판단하는 단계는 상기 제 1 내지 제 3 조건을 모두 만족하면 상기 차량의 움직임이 없는 경우로 판단하고, 상기 제 1 내지 제 3 조건 중 어느 하나라도 만족하지 않으면 상기 차량의 움직임이 있는 경우로 판단하는 것을 특징으로 하는 운전 지원 방법. - 청구항 7에 있어서,
상기 수신하는 단계 이전에,
상기 차량에 설치된 스위치를 통해 주차 또는 출차를 위한 선택신호를 수신하는 단계를 더 포함하는 것을 특징으로 하는 운전 지원 방법.
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020160043408A KR102515667B1 (ko) | 2016-04-08 | 2016-04-08 | 운전 지원 장치 및 이를 이용한 운전 지원 방법 |
| DE102017003381.1A DE102017003381B4 (de) | 2016-04-08 | 2017-04-06 | Fahrassistenzvorrichtung und Fahrassistenzverfahren, das diese verwendet |
| US15/482,227 US10286902B2 (en) | 2016-04-08 | 2017-04-07 | Driving assistance device and driving assistance method using the same |
| CN201710224197.0A CN107284444B (zh) | 2016-04-08 | 2017-04-07 | 驾驶协助装置及利用该装置的驾驶协助方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020160043408A KR102515667B1 (ko) | 2016-04-08 | 2016-04-08 | 운전 지원 장치 및 이를 이용한 운전 지원 방법 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20170115780A true KR20170115780A (ko) | 2017-10-18 |
| KR102515667B1 KR102515667B1 (ko) | 2023-03-29 |
Family
ID=59929527
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020160043408A Active KR102515667B1 (ko) | 2016-04-08 | 2016-04-08 | 운전 지원 장치 및 이를 이용한 운전 지원 방법 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US10286902B2 (ko) |
| KR (1) | KR102515667B1 (ko) |
| CN (1) | CN107284444B (ko) |
| DE (1) | DE102017003381B4 (ko) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110194145A (zh) * | 2018-02-26 | 2019-09-03 | 本田技研工业株式会社 | 车辆控制装置、车辆控制方法及存储介质 |
| KR20200022675A (ko) * | 2018-08-23 | 2020-03-04 | 현대자동차주식회사 | 원격제어장치, 이를 이용한 원격주차보조 시스템 및 그의 제어 방법 |
| CN111301395A (zh) * | 2019-12-31 | 2020-06-19 | 威马智慧出行科技(上海)有限公司 | 自动泊车控制方法、电子设备及汽车 |
| CN111645672A (zh) * | 2020-06-08 | 2020-09-11 | 中国第一汽车股份有限公司 | 一种自动泊车控制方法、装置、设备及存储介质 |
| US11217899B2 (en) | 2019-08-05 | 2022-01-04 | Samsung Electronics Co., Ltd | Antenna module and electronic device for using the antenna module |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3976604B2 (ja) | 2002-03-29 | 2007-09-19 | 篠田プラズマ株式会社 | 表示装置 |
| JP6613989B2 (ja) * | 2016-03-30 | 2019-12-04 | アイシン・エィ・ダブリュ株式会社 | 制御装置 |
| GB2568881A (en) * | 2017-11-28 | 2019-06-05 | Jaguar Land Rover Ltd | Vehicle control apparatus and method |
| JP7020329B2 (ja) * | 2018-07-25 | 2022-02-16 | トヨタ自動車株式会社 | 自動駐車制御装置及び自動駐車システム |
| KR102673774B1 (ko) * | 2018-10-08 | 2024-06-10 | 주식회사 에이치엘클레무브 | 대형 차량 접근 경보 장치 및 그의 제어 방법 |
| CN113602250A (zh) * | 2021-08-27 | 2021-11-05 | 奇瑞新能源汽车股份有限公司 | 电动汽车的自动驻车方法、装置、车辆及存储介质 |
| US20260048733A1 (en) * | 2024-08-13 | 2026-02-19 | Valeo Schalter Und Sensoren Gmbh | Vehicle parking sensor system for automatic tire orientation on a sloped roadway |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008291791A (ja) * | 2007-05-25 | 2008-12-04 | Toyota Motor Corp | 駐車支援装置 |
| JP4488012B2 (ja) * | 2007-02-27 | 2010-06-23 | トヨタ自動車株式会社 | 車両走行支援装置 |
| KR20120040789A (ko) | 2010-10-20 | 2012-04-30 | 주식회사 만도 | 주차 지원 방법 및 그 시스템 |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3755464B2 (ja) * | 2002-01-11 | 2006-03-15 | トヨタ自動車株式会社 | 駐車支援装置 |
| US7826952B2 (en) * | 2004-06-15 | 2010-11-02 | Disser Robert J | Brake control system |
| DE102005014801B4 (de) * | 2005-03-31 | 2022-04-21 | Bayerische Motoren Werke Aktiengesellschaft | Verfahren und Vorrichtung zur Steuerung einer Bremsanlage eines Kraftfahrzeuges |
| DE102007002267A1 (de) * | 2007-01-16 | 2008-08-21 | GM Global Technology Operations, Inc., Detroit | Verfahren zum Einparken eines Kraftfahrzeugs sowie Längsbewegungssteuerungseinrichtung für ein Kraftfahrzeug |
| DE102007006700B4 (de) * | 2007-02-10 | 2020-09-24 | Bayerische Motoren Werke Aktiengesellschaft | Bremsregelungsanlage für Kraftfahrzeuge |
| FR2921882B1 (fr) * | 2007-10-03 | 2009-12-04 | Renault Sas | Dispositif d'assistance aux manoeuvres de montee d'une pente d'un vehicule automobile |
| US7743860B2 (en) * | 2007-10-09 | 2010-06-29 | Ford Global Technologies, Llc | Holding a hybrid electric vehicle on an inclined surface |
| KR101478067B1 (ko) * | 2012-03-21 | 2015-01-02 | 주식회사 만도 | 차량의 주차 조향 보조 시스템 및 그 제어방법 |
| WO2014027111A1 (en) * | 2012-08-16 | 2014-02-20 | Jaguar Land Rover Limited | Vehicle speed control system |
| JP6095780B2 (ja) * | 2012-08-16 | 2017-03-15 | ジャガー ランド ローバー リミテッドJaguar Land Rover Limited | 車両の速度制御システムを操作する方法、および車両の速度を制御するシステム |
| DE102014208917B4 (de) * | 2013-07-02 | 2021-07-01 | Ford Global Technologies, Llc | Steuerung der Fahrzeuggeschwindigkeit während des Einparkens |
| KR101970238B1 (ko) * | 2014-05-30 | 2019-04-22 | 주식회사 만도 | 제동 시스템 및 주차시 제동 제어 방법 |
| KR20160043408A (ko) | 2014-10-13 | 2016-04-21 | 김인균 | 가스버너용 바람막이 |
| GB2531776B (en) * | 2014-10-30 | 2017-12-20 | Jaguar Land Rover Ltd | Controlling the operation of a vehicle brake system |
| KR101553868B1 (ko) * | 2014-12-03 | 2015-09-17 | 현대모비스 주식회사 | 차량의 자동 주차 제어장치 및 그 방법 |
| DE102015112311A1 (de) * | 2015-07-28 | 2017-02-02 | Valeo Schalter Und Sensoren Gmbh | Verfahren zum zumindest semi-autonomen Manövrieren eines Kraftfahrzeugs mit Erkennung eines Bordsteinkontakts, Fahrerassistenzsystem sowie Kraftfahrzeug |
| US10414388B2 (en) * | 2016-03-22 | 2019-09-17 | Ford Global Technologies, Llc | Systems for distributing braking force and related methods |
-
2016
- 2016-04-08 KR KR1020160043408A patent/KR102515667B1/ko active Active
-
2017
- 2017-04-06 DE DE102017003381.1A patent/DE102017003381B4/de active Active
- 2017-04-07 US US15/482,227 patent/US10286902B2/en active Active
- 2017-04-07 CN CN201710224197.0A patent/CN107284444B/zh active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4488012B2 (ja) * | 2007-02-27 | 2010-06-23 | トヨタ自動車株式会社 | 車両走行支援装置 |
| JP2008291791A (ja) * | 2007-05-25 | 2008-12-04 | Toyota Motor Corp | 駐車支援装置 |
| KR20120040789A (ko) | 2010-10-20 | 2012-04-30 | 주식회사 만도 | 주차 지원 방법 및 그 시스템 |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110194145A (zh) * | 2018-02-26 | 2019-09-03 | 本田技研工业株式会社 | 车辆控制装置、车辆控制方法及存储介质 |
| CN110194145B (zh) * | 2018-02-26 | 2022-04-29 | 本田技研工业株式会社 | 车辆控制装置、车辆控制方法及存储介质 |
| KR20200022675A (ko) * | 2018-08-23 | 2020-03-04 | 현대자동차주식회사 | 원격제어장치, 이를 이용한 원격주차보조 시스템 및 그의 제어 방법 |
| US11217899B2 (en) | 2019-08-05 | 2022-01-04 | Samsung Electronics Co., Ltd | Antenna module and electronic device for using the antenna module |
| US12463351B2 (en) | 2019-08-05 | 2025-11-04 | Samsung Electronics Co., Ltd. | Antenna module and electronic device for using the antenna module |
| CN111301395A (zh) * | 2019-12-31 | 2020-06-19 | 威马智慧出行科技(上海)有限公司 | 自动泊车控制方法、电子设备及汽车 |
| CN111301395B (zh) * | 2019-12-31 | 2021-08-13 | 威马智慧出行科技(上海)有限公司 | 自动泊车控制方法、电子设备及汽车 |
| CN111645672A (zh) * | 2020-06-08 | 2020-09-11 | 中国第一汽车股份有限公司 | 一种自动泊车控制方法、装置、设备及存储介质 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN107284444B (zh) | 2019-11-19 |
| CN107284444A (zh) | 2017-10-24 |
| DE102017003381B4 (de) | 2022-10-13 |
| US20170291601A1 (en) | 2017-10-12 |
| KR102515667B1 (ko) | 2023-03-29 |
| DE102017003381A1 (de) | 2017-10-12 |
| US10286902B2 (en) | 2019-05-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20170115780A (ko) | 운전 지원 장치 및 이를 이용한 운전 지원 방법 | |
| US7786896B2 (en) | Parking assistance system and parking assistance method | |
| KR101815599B1 (ko) | Tpms를 이용한 주차 지원 장치 | |
| US9168955B2 (en) | Smart parking assist system of vehicle and control method thereof | |
| CN102267461B (zh) | 用于车辆的泊车系统 | |
| US9505435B2 (en) | Method for pulling a vehicle into or out of a parking space and corresponding assistance system and vehicle | |
| US8515641B2 (en) | Method and system for assisting the driver of a motor vehicle in identifying suitable parking spaces for the vehicle | |
| JP6062406B2 (ja) | 駐車支援装置および駐車支援方法 | |
| EP1591315B1 (en) | Parking assist apparatus for vehicle | |
| CN101412401B (zh) | 用于泊车支持的控制装置和方法 | |
| CN105416283B (zh) | 停车辅助装置 | |
| EP2990273A1 (en) | Parking assist device | |
| CN101980916A (zh) | 用于辅助车辆驾驶员离开停车位的方法和设备 | |
| WO2018168512A1 (ja) | 運転支援装置および方法 | |
| CN105416275A (zh) | 出库辅助装置 | |
| JP2012001144A (ja) | 駐車支援装置 | |
| CN103917435A (zh) | 用于支持机动车的驾驶员的方法以及实施所述方法的设备 | |
| CN102576495A (zh) | 针对汽车的碰撞监控 | |
| GB2486814A (en) | Method for assisting a driver of a motor vehicle | |
| JPWO2019181260A1 (ja) | 駐車支援装置 | |
| JP5962598B2 (ja) | 駐車支援装置及び駐車支援方法 | |
| KR20090080769A (ko) | 주차 보조 기능을 이용하여 주차 공간을 확보하기 위한방법 및 장치 | |
| KR20140052421A (ko) | 비활성화 방지 기능을 갖는 자동 주차 보조 시스템 및 그 방법 | |
| KR101438920B1 (ko) | 주차 조향 보조 방법 및 이를 실행하는 장치 | |
| US12179743B2 (en) | Moving object determination device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
St.27 status event code: A-0-1-A10-A12-nap-PA0109 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| R17-X000 | Change to representative recorded |
St.27 status event code: A-3-3-R10-R17-oth-X000 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-2-2-P10-P22-nap-X000 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-3-3-R10-R13-asn-PN2301 St.27 status event code: A-3-3-R10-R11-asn-PN2301 |
|
| A201 | Request for examination | ||
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-2-2-P10-P22-nap-X000 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-3-3-R10-R13-asn-PN2301 St.27 status event code: A-3-3-R10-R11-asn-PN2301 |
|
| N231 | Notification of change of applicant | ||
| PN2301 | Change of applicant |
St.27 status event code: A-3-3-R10-R13-asn-PN2301 St.27 status event code: A-3-3-R10-R11-asn-PN2301 |
|
| R19-X000 | Request for party data change rejected |
St.27 status event code: A-3-3-R10-R19-oth-X000 |
|
| D13-X000 | Search requested |
St.27 status event code: A-1-2-D10-D13-srh-X000 |
|
| D14-X000 | Search report completed |
St.27 status event code: A-1-2-D10-D14-srh-X000 |
|
| N231 | Notification of change of applicant | ||
| PN2301 | Change of applicant |
St.27 status event code: A-3-3-R10-R13-asn-PN2301 St.27 status event code: A-3-3-R10-R11-asn-PN2301 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| R17-X000 | Change to representative recorded |
St.27 status event code: A-3-3-R10-R17-oth-X000 |
|
| E601 | Decision to refuse application | ||
| PE0601 | Decision on rejection of patent |
St.27 status event code: N-2-6-B10-B15-exm-PE0601 |
|
| AMND | Amendment | ||
| E13-X000 | Pre-grant limitation requested |
St.27 status event code: A-2-3-E10-E13-lim-X000 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| PX0901 | Re-examination |
St.27 status event code: A-2-3-E10-E12-rex-PX0901 |
|
| PX0701 | Decision of registration after re-examination |
St.27 status event code: A-3-4-F10-F13-rex-PX0701 |
|
| X701 | Decision to grant (after re-examination) | ||
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U11-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |