KR20170121379A - 원격 제어 기기의 위치 인식 및 제어 장치 - Google Patents
원격 제어 기기의 위치 인식 및 제어 장치 Download PDFInfo
- Publication number
- KR20170121379A KR20170121379A KR1020160049424A KR20160049424A KR20170121379A KR 20170121379 A KR20170121379 A KR 20170121379A KR 1020160049424 A KR1020160049424 A KR 1020160049424A KR 20160049424 A KR20160049424 A KR 20160049424A KR 20170121379 A KR20170121379 A KR 20170121379A
- Authority
- KR
- South Korea
- Prior art keywords
- remote control
- control device
- value
- controlling
- recognizing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images














Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04Q—SELECTING
- H04Q9/00—Arrangements in telecontrol or telemetry systems for selectively calling a substation from a main station, in which substation desired apparatus is selected for applying a control signal thereto or for obtaining measured values therefrom
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L12/00—Data switching networks
- H04L12/02—Details
- H04L12/12—Arrangements for remote connection or disconnection of substations or of equipment thereof
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W4/00—Services specially adapted for wireless communication networks; Facilities therefor
- H04W4/02—Services making use of location information
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04Q—SELECTING
- H04Q2209/00—Arrangements in telecontrol or telemetry systems
- H04Q2209/40—Arrangements in telecontrol or telemetry systems using a wireless architecture
Landscapes
- Engineering & Computer Science (AREA)
- Computer Networks & Wireless Communication (AREA)
- Signal Processing (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
- Studio Devices (AREA)
- Navigation (AREA)
Abstract
Description

도 2는 도 1에 도시된 위치 인식 및 제어 장치(100) 내 서보 모터(110)의 사진이다.
도 3은 도 1에 도시된 위치 인식 및 제어 장치(100) 내 마이크로 프로세서(130)의 사진이다.
도 4는 도 1에 도시된 위치 인식 및 제어 장치(100) 내 마이크로 프로세서(130)의 3축 자이로 센싱 값 및 3축 가속도 값과 상보 필터(140)를 이용하여 필터링된 데이터에 대한 결과 파형 그래프이다.
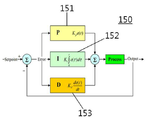
도 5는 도 1에 도시된 위치 인식 및 제어 장치(100) 내 PID 제어기(150)의 블록도이다.
도 6은 도 5에 도시된 PID 제어기(150)에서 이득값을 산출하는 SimpleBGC 프로그램의 화면이다.
도 7은 도 1에 도시된 위치 인식 및 제어 장치(100)에 고프로 카메라(120)를 장착한 2축 짐벌(170)의 사시도이다.
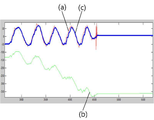
도 8은 도 5에 도시된 PID 제어기(150)에서 PID 테스트를 한 결과에 대한 결과 파형이다.
도 9는 도 1에 도시된 위치 인식 및 제어 장치(100)에서 웹 스크립을 이용한 웹 스트리밍을 나타내는 사진이다.
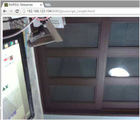
도 10은 도 1에 도시된 위치 인식 및 제어 장치(100)에서 파이어 폭스를 통한 재생이 확인된 화면을 나타내는 사진이다.
도 11은 도 1에 도시된 위치 인식 및 제어 장치(100)에서 다음 팟 플레이어 등의 일반 플레이어에서 영상을 재생한 화면을 나타내는 사진이다.
도 12는 도 1에 도시된 위치 인식 및 제어 장치(100) 내 GPS부(160)의 재료인 USB 모듈을 나타내는 사진이다.
도 13은 도 1에 도시된 위치 인식 및 제어 장치(100)에서 CGPS를 이용하여 GPS 값을 분류해서 디스플레이한 화면이다.
도 14는 도 1에 도시된 위치 인식 및 제어 장치(100)에서 XGPS를 이용하여 GPS 값을 시각적으로 디스플레이한 화면이다.
도 15는 도 1에 도시된 위치 인식 및 제어 장치(100)에서 GPS 값을 웹 서버(200)에서 수신하여 현재의 위치를 맵에 오버레이시킨 결과를 디스플레이한 화면이다.
도 16은 도 1에 도시된 위치 인식 및 제어 장치(100)에서 GPS 값을 웹 서버(200)에서 수신하여 텍스트 블록에 좌표값이 나오도록 디스플레이한 화면이다.
도 17은 도 1에 도시된 위치 인식 및 제어 장치(100)에서 GPS 값을 웹 서버(200)에서 수신하여 현재의 위치를 사용자의 무선 단말기(300)에서 재확인하기 위해 디스플레이한 화면이다.

110 : 서보 모터
120 : 카메라
130: 마이크로 프로세서
140: 필터
150 : PID 제어기
160: GPS부
170: 짐벌
200 : 웹 서버
300 : 사용자 단말기
Claims (12)
- 원격 제어 기기에 동력을 제공하는 서보 모터;
상기 서보 모터에 부착되어 상기 원격 제어 기기의 이동에 따라 실시간으로 영상을 촬영하는 카메라;
상기 원격 제어 기기 내 기판에 장착되어 상기 원격 제어 기기의 이동에 대한 3축 자이로 센싱 값 및 3축 가속도 값을 출력하는 마이크로 프로세서;
상기 3축 자이로 센싱 값 및 상기 3축 가속도 값을 인가받아 롤 및 피치의 가속도 값을 각도로 변환하여 필터링하는 필터;
상기 필터링된 값을 인가받아 비례 이득값, 적분 이득값 및 미분 이득값을 조절하여 펄스 폭 변조로 상기 서보 모터를 제어하는 PID 제어기;
위성으로부터 수신되는 상기 원격 제어 기기의 위치 데이터를 분류하고 시각 자료로 변환 및 웹 서버에 전송하여 상기 원격 제어 기기의 현재 위치를 맵에 좌표값과 함께 오버레이시키는 GPS부; 및
상기 원격 제어 기기를 지지하고 주변 환경에 따라 흔들림 없이 평형 상태를 유지시키면서, 3축에 대하여 상기 원격 제어 기기의 회전을 허용하는 짐벌;
을 구비하고,
상기 원격 제어 기기의 현재 위치에 대한 오버레이 상에서 오류 발생시 사용자 단말기를 이용해서 재확인이 가능한 것을 특징으로 하는,
원격 제어 기기의 위치 인식 및 제어 장치.
- 제 1 항에 있어서,
상기 PID 제어기는
상기 필터링된 값을 인가받아 목표값에서 감산하고 상기 비례 이득값과 승산하여 출력하는 비례 제어부;
상기 필터링된 값을 인가받아 상기 목표값에서 감산하고 적분한 후 상기 적분 이득값과 승산하여 출력하는 적분 제어부; 및
상기 필터링된 값을 인가받아 상기 목표값에서 감산하고 미분한 후 상기 미분 이득값과 승산하여 출력하는 미분 제어부;
를 구비하는 것을 특징으로 하는,
원격 제어 기기의 위치 인식 및 제어 장치.
- 제 2 항에 있어서,
상기 필터는
아래의 수학식에 의해 필터링하고,

상기 gyrData는 상기 3축 자이로 센싱 값이고, 상기 accData는 상기 3축 가속도 값이며, 상기 0.98 및 상기 0.02의 상수값은 사용자가 임의로 결정하는 파라미터값인 것을 특징으로 하는,
원격 제어 기기의 위치 인식 및 제어 장치.
- 제 1 항에 있어서,
상기 짐벌은
상기 카메라로부터 영상 스트리밍과 멀티 스레드가 가능한 라즈베리 파이를 사용하여 제작되는 것을 특징으로 하는,
원격 제어 기기의 위치 인식 및 제어 장치.
- 제 1 항에 있어서,
상기 필터는
상보 필터인 것을 특징으로 하는,
원격 제어 기기의 위치 인식 및 제어 장치.
- 제 1 항에 있어서,
상기 PID 제어기는
SimpleBGC 프로그램을 이용하여 상기 비례 이득값, 상기 적분 이득값 및 상기 미분 이득값을 산출하는 것을 특징으로 하는,
원격 제어 기기의 위치 인식 및 제어 장치.
- 제 1 항에 있어서,
상기 서보 모터는
x축의 모터 주기를 30 Hz로 조절하는 것을 특징으로 하는,
원격 제어 기기의 위치 인식 및 제어 장치.
- 제 1 항에 있어서,
상기 GPS부는
USB 인터페이스를 이용할 수 있는 USB 모듈인 것을 특징으로 하는,
원격 제어 기기의 위치 인식 및 제어 장치.
- 제 8 항에 있어서,
상기 위치 인식 및 제어 장치는
상기 원격 제어 기기에 연결된 폐쇄 네트워크를 무선 인터넷 망에 연결하는 것을 특징으로 하는,
원격 제어 기기의 위치 인식 및 제어 장치.
- 제 1 항에 있어서,
상기 원격 제어 기기는
드론 및 무선 제어(Radio Control, RC) 기기를 포함하는 것을 특징으로 하는,
원격 제어 기기의 위치 인식 및 제어 장치.
- 제 1 항에 있어서,
상기 사용자 단말기는
유선 단말기 및 무선 단말기를 포함하는 것을 특징으로 하는,
원격 제어 기기의 위치 인식 및 제어 장치.
- 원격 제어 기기에 동력을 제공하는 서보 모터;
상기 서보 모터에 부착되어 상기 원격 제어 기기의 이동에 따라 실시간으로 영상을 촬영하는 카메라;
상기 원격 제어 기기 내 기판에 장착되어 상기 원격 제어 기기의 이동에 대한 3축 자이로 센싱 값 및 3축 가속도 값을 출력하는 마이크로 프로세서;
상기 3축 자이로 센싱 값 및 상기 3축 가속도 값을 인가받아 롤 및 피치의 가속도 값을 각도로 변환하여 필터링하는 필터;
상기 필터링된 값을 인가받아 비례 이득값, 적분 이득값 및 미분 이득값을 조절하여 펄스 폭 변조로 상기 서보 모터를 제어하는 PID 제어기;
위성으로부터 수신되는 상기 원격 제어 기기의 위치 데이터를 분류하고 시각 자료로 변환 및 웹 서버에 전송하여 상기 원격 제어 기기의 현재 위치를 맵에 좌표값과 함께 오버레이시키는 GPS부; 및
상기 원격 제어 기기를 지지하고 주변 환경에 따라 흔들림 없이 평형 상태를 유지시키면서, 3축에 대하여 상기 원격 제어 기기의 회전을 허용하는 짐벌;
을 구비하고,
상기 원격 제어 기기의 현재 위치에 대한 오버레이 상에서 오류 발생시 사용자 단말기를 이용해서 재확인이 가능하며,
무선 인터넷 망 및 AP 중계기 라우터를 이용하여 원격 제어 거리를 확장하는 것을 특징으로 하는,
원격 제어 기기의 위치 인식 및 제어 장치.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020160049424A KR101802880B1 (ko) | 2016-04-22 | 2016-04-22 | 원격 제어 기기의 위치 인식 및 제어 장치 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020160049424A KR101802880B1 (ko) | 2016-04-22 | 2016-04-22 | 원격 제어 기기의 위치 인식 및 제어 장치 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20170121379A true KR20170121379A (ko) | 2017-11-02 |
| KR101802880B1 KR101802880B1 (ko) | 2017-11-30 |
Family
ID=60383512
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020160049424A Active KR101802880B1 (ko) | 2016-04-22 | 2016-04-22 | 원격 제어 기기의 위치 인식 및 제어 장치 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR101802880B1 (ko) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113218391A (zh) * | 2021-03-23 | 2021-08-06 | 合肥工业大学 | 一种基于ewt算法的姿态解算方法 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108614572A (zh) * | 2018-04-28 | 2018-10-02 | 中国地质大学(武汉) | 一种基于飞行器的目标识别追踪方法、设备及存储设备 |
-
2016
- 2016-04-22 KR KR1020160049424A patent/KR101802880B1/ko active Active
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113218391A (zh) * | 2021-03-23 | 2021-08-06 | 合肥工业大学 | 一种基于ewt算法的姿态解算方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR101802880B1 (ko) | 2017-11-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11233943B2 (en) | Multi-gimbal assembly | |
| KR102680675B1 (ko) | 비행 제어 방법 및 이를 지원하는 전자 장치 | |
| US10086954B2 (en) | UAV flight display | |
| US10115048B2 (en) | Method and system for configurable and scalable unmanned aerial vehicles and systems | |
| CN109952755B (zh) | 飞行路径生成方法、飞行路径生成系统、飞行体以及记录介质 | |
| EP3629309A2 (en) | Drone real-time interactive communications system | |
| CN105518555B (zh) | 目标追踪系统及方法 | |
| US9811083B2 (en) | System and method of controlling autonomous vehicles | |
| EP3564621A1 (en) | Flight path display method, mobile platform, flight system, recording medium, and program | |
| JP2013144539A (ja) | 遠隔制御装置によって無人機を直観的に操縦するための方法 | |
| KR101887509B1 (ko) | 원격 제어 기기의 위치 인식을 위한 영상 gps 맵 오버레이 방법 | |
| JP2019511044A (ja) | 飛行デバイスの動き制御のための方法およびシステム | |
| US20170264907A1 (en) | Method of encoding and decoding a video of a drone, and associated devices | |
| WO2020143677A1 (zh) | 一种飞行控制方法及飞行控制系统 | |
| CN113508351A (zh) | 控制方法、智能眼镜、可移动平台、云台、控制系统及计算机可读存储介质 | |
| WO2018187916A1 (zh) | 云台随动控制方法及控制设备 | |
| CN106094876A (zh) | 一种无人机目标锁定系统及其方法 | |
| KR20190134024A (ko) | 임무 수행용 무인비행체의 임무 제어방법 | |
| KR101802880B1 (ko) | 원격 제어 기기의 위치 인식 및 제어 장치 | |
| CN110799801A (zh) | 基于无人机的测距方法、装置及无人机 | |
| US20200217665A1 (en) | Mobile platform, image capture path generation method, program, and recording medium | |
| Park et al. | Realization of distributed formation flying using a group of autonomous quadcopters and application to visual performance show | |
| KR20170086992A (ko) | 무인항공기를 이용한 입체공간 이미지 획득 시스템 | |
| Coombes et al. | Development of a generic network enabled autonomous vehicle system | |
| CN206451132U (zh) | 一种虚拟现实设备 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
St.27 status event code: A-0-1-A10-A12-nap-PA0109 |
|
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| AMND | Amendment | ||
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| E601 | Decision to refuse application | ||
| PE0601 | Decision on rejection of patent |
St.27 status event code: N-2-6-B10-B15-exm-PE0601 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| AMND | Amendment | ||
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| PX0901 | Re-examination |
St.27 status event code: A-2-3-E10-E12-rex-PX0901 |
|
| PX0701 | Decision of registration after re-examination |
St.27 status event code: A-3-4-F10-F13-rex-PX0701 |
|
| X701 | Decision to grant (after re-examination) | ||
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U11-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 4 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 5 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-5-5-R10-R18-oth-X000 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 6 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-5-5-R10-R18-oth-X000 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 7 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-5-5-R10-R18-oth-X000 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 8 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-5-5-R10-R18-oth-X000 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 9 |
|
| U11 | Full renewal or maintenance fee paid |
Free format text: ST27 STATUS EVENT CODE: A-4-4-U10-U11-OTH-PR1001 (AS PROVIDED BY THE NATIONAL OFFICE) Year of fee payment: 9 |