KR20170123189A - 스마트 액추에이터 모듈 및 그 구동 제어 방법 - Google Patents
스마트 액추에이터 모듈 및 그 구동 제어 방법 Download PDFInfo
- Publication number
- KR20170123189A KR20170123189A KR1020160052544A KR20160052544A KR20170123189A KR 20170123189 A KR20170123189 A KR 20170123189A KR 1020160052544 A KR1020160052544 A KR 1020160052544A KR 20160052544 A KR20160052544 A KR 20160052544A KR 20170123189 A KR20170123189 A KR 20170123189A
- Authority
- KR
- South Korea
- Prior art keywords
- position value
- encoder position
- incremental encoder
- absolute
- absolute encoder
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images







Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/14—Electronic commutators
- H02P6/16—Circuit arrangements for detecting position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/08—Controls for manipulators by means of sensing devices, e.g. viewing or touching devices
- B25J13/088—Controls for manipulators by means of sensing devices, e.g. viewing or touching devices with position, velocity or acceleration sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/10—Program-controlled manipulators characterised by positioning means for manipulator elements
- B25J9/12—Program-controlled manipulators characterised by positioning means for manipulator elements electric
- B25J9/126—Rotary actuators
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K11/00—Structural association of dynamo-electric machines with electric components or with devices for shielding, monitoring or protection
- H02K11/20—Structural association of dynamo-electric machines with electric components or with devices for shielding, monitoring or protection for measuring, monitoring, testing, protecting or switching
- H02K11/21—Devices for sensing speed or position, or actuated thereby
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K7/00—Arrangements for handling mechanical energy structurally associated with dynamo-electric machines, e.g. structural association with mechanical driving motors or auxiliary dynamo-electric machines
- H02K7/10—Structural association with clutches, brakes, gears, pulleys or mechanical starters
- H02K7/116—Structural association with clutches, brakes, gears, pulleys or mechanical starters with gears
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/006—Controlling linear motors
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Human Computer Interaction (AREA)
- Transmission And Conversion Of Sensor Element Output (AREA)
Abstract
Description
도 2는 본 발명의 일실시예에 따른 스마트 액추에이터 모듈을 보여주는 사시도이다.
도 3 및 도 4는 본 발명의 일실시예에 따른 예시적인 대응 테이블이다.
도 5 및 도 6은 본 발명의 일실시예에 따른 스마트 액추에이터 모듈의 구동 제어 방법을 개략적으로 나타낸 플로우 차트이다.
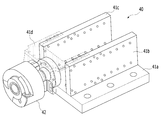
도 7은 본 발명의 실시예에 따른 캘리브레이션 지그를 보여주는 사시도이다.
도 8은 도 7의 캘리브레이션 지그에 스마트 액추에이터 모듈을 장착한 모습을 보여주는 사시도이다.
10: 액추에이터
11: 모터
12: 감속기
20: 앱솔루트 인코더
30: 제어부
31: 제어기
32: 메모리
40: 캘리브레이션 지그
42: 인크리멘탈 인코더
T: 대응 테이블
Claims (5)
- 모터와 감속기를 갖는 액추에이터와,
상기 액추에이터의 출력축에 커플링된 앱솔루트 인코더(absolute encoder)와,
상기 모터와 앱솔루트 인코더의 구동을 제어하는 제어기, 및 메모리를 갖는 제어부를 포함하며,
상기 메모리에는 앱솔루트 인코더 위치값과 인크리멘탈 인코더(incremental encoder) 위치값의 관계를 일대일로 규정한 대응 테이블이 저장되며,
상기 제어기는, 상기 액추에이터의 목표 위치값이 수신되면 상기 목표 위치값에 대응하는 인크리멘탈 인코더 위치값을 연산하고, 상기 대응 테이블로부터 상기 연산된 인크리멘탈 인코더 위치값에 대응하는 앱솔루트 인코더 위치값을 반환받아, 상기 반환된 앱솔루트 인코더 위치값을 이용하여 상기 모터를 구동하는 것을 특징으로 하는 스마트 액추에이터 모듈.
- 제1항에 있어서,
상기 제어기는, 상기 연산된 인크리멘탈 인코더 위치값과 상기 대응 테이블에 저장된 인크리멘탈 인코더 위치값을 비교하여, 저장된 인크리멘털 위치값 중 상기 연산된 인크리멘탈 인코더 위치값과 가장 가까운 값에 대응하는 앱솔루트 인코더 위치값을 반환받는 것을 특징으로 하는 스마트 액추에이터 모듈.
- 제1항에 따른 스마트 액추에이터 모듈의 구동 제어 방법으로서,
a) 상기 스마트 액추에이터 모듈의 메모리에 앱솔루트 인코더 위치값과 인크리멘탈 인코더 위치값의 관계를 일대일로 규정한 대응 테이블을 저장하는 단계와,
b) 제어기가 액추에이터의 목표 위치값을 수신하는 단계와,
c) 상기 제어기가, 상기 목표 위치값에 대응하는 인크리멘탈 인코더 위치값을 연산하는 단계와,
d) 상기 제어기가, 상기 대응 테이블로부터 상기 연산된 인크리멘탈 인코더 위치값에 대응하는 앱솔루트 인코더 위치값을 반환받는 단계와,
e) 상기 제어기가, 상기 반환된 앱솔루트 인코더 위치값을 이용하여 상기 모터를 구동하는 단계를 포함하는 것을 특징으로 하는 스마트 액추에이터 모듈의 구동 제어 방법.
- 제3항에 있어서,
상기 a단계는,
a-1) 상기 스마트 액추에이터 모듈을 인크리멘탈 인코더가 장착된 캘리브레이션 지그(calibration jig)에 장착하는 단계와,
a-2) 상기 액추에이터를 구동하면서, 상기 스마트 액추에이터 모듈의 앱솔루트 인코더의 출력값과, 상기 캘리브레이션 지그에 장착된 인크리멘탈 인코더의 출력값을 동시에 측정하는 단계와,
a-3) 상기 측정된 앱솔루트 인코더의 출력값과 인크리멘탈 인코더의 출력값을 이용하여, 앱솔루트 인코더 위치값과 인크리멘탈 인코더 위치값의 관계를 일대일로 규정한 대응 테이블을 상기 메모리에 저장하는 단계를 포함하는 것을 특징으로 하는 스마트 액추에이터 모듈의 구동 제어 방법.
- 제3항에 있어서,
상기 d단계는,
상기 제어기가, 상기 연산된 인크리멘탈 인코더 위치값과 상기 대응 테이블에 저장된 인크리멘탈 인코더 위치값을 비교하여, 저장된 인크리멘털 위치값 중 상기 연산된 인크리멘탈 인코더 위치값과 가장 가까운 값에 대응하는 앱솔루트 인코더 위치값을 반환받는 단계인 것을 특징으로 하는 스마트 액추에이터 모듈의 구동 제어 방법.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020160052544A KR101843421B1 (ko) | 2016-04-28 | 2016-04-28 | 스마트 액추에이터 모듈 및 그 구동 제어 방법 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020160052544A KR101843421B1 (ko) | 2016-04-28 | 2016-04-28 | 스마트 액추에이터 모듈 및 그 구동 제어 방법 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20170123189A true KR20170123189A (ko) | 2017-11-07 |
| KR101843421B1 KR101843421B1 (ko) | 2018-03-30 |
Family
ID=60384850
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020160052544A Expired - Fee Related KR101843421B1 (ko) | 2016-04-28 | 2016-04-28 | 스마트 액추에이터 모듈 및 그 구동 제어 방법 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR101843421B1 (ko) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20230001837A (ko) * | 2021-06-29 | 2023-01-05 | 현대위아 주식회사 | 액추에이터 위치제어장치 및 방법 |
-
2016
- 2016-04-28 KR KR1020160052544A patent/KR101843421B1/ko not_active Expired - Fee Related
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20230001837A (ko) * | 2021-06-29 | 2023-01-05 | 현대위아 주식회사 | 액추에이터 위치제어장치 및 방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR101843421B1 (ko) | 2018-03-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN109849046B (zh) | 一种舵机转子的回零方法、回零系统、舵机及机器人 | |
| US5457371A (en) | Binary locally-initializing incremental encoder | |
| US10116190B2 (en) | Rotary positioning system | |
| CN111070237B (zh) | 一体化关节及一体化关节多传感器控制系统和方法 | |
| JP5657633B2 (ja) | 移動体が反転するときの位置誤差を補正するサーボ制御装置 | |
| JP5640733B2 (ja) | エンコーダ装置、駆動装置、及びロボット装置 | |
| JP4962488B2 (ja) | トルク測定装置 | |
| JP4684330B2 (ja) | ねじ締め装置 | |
| CN212287705U (zh) | 一体化关节 | |
| US20100301794A1 (en) | System and method including feed-forward control of a brushless synchronous motor | |
| US10031507B2 (en) | Servo control device | |
| WO2018211565A1 (ja) | 制御パラメータ調整装置 | |
| KR101843421B1 (ko) | 스마트 액추에이터 모듈 및 그 구동 제어 방법 | |
| JPS61258113A (ja) | 位置エンコ−ダ | |
| JP5640732B2 (ja) | エンコーダ装置、駆動装置、及びロボット装置 | |
| US7343684B2 (en) | Robotic system with traction drive | |
| US6989646B2 (en) | Multi-axis air/electrical control system | |
| US10119842B1 (en) | Encoder design and use | |
| JP4824080B2 (ja) | 同期制御システム | |
| JP6535645B2 (ja) | アブソリュートエンコーダ | |
| JP6271903B2 (ja) | サーボ装置、及びサーボ装置の制御方法 | |
| KR101461627B1 (ko) | 감속기 출력축의 절대위치 검출방법 | |
| JP2011252840A (ja) | 回転角度検出装置の初期設定方法 | |
| KR102021461B1 (ko) | 모터 제어 장치 및 방법 | |
| JP5138960B2 (ja) | モータ制御装置及びモータ制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| PA0109 | Patent application |
St.27 status event code: A-0-1-A10-A12-nap-PA0109 |
|
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| R17-X000 | Change to representative recorded |
St.27 status event code: A-3-3-R10-R17-oth-X000 |
|
| D13-X000 | Search requested |
St.27 status event code: A-1-2-D10-D13-srh-X000 |
|
| D14-X000 | Search report completed |
St.27 status event code: A-1-2-D10-D14-srh-X000 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| T11-X000 | Administrative time limit extension requested |
St.27 status event code: U-3-3-T10-T11-oth-X000 |
|
| T11-X000 | Administrative time limit extension requested |
St.27 status event code: U-3-3-T10-T11-oth-X000 |
|
| T11-X000 | Administrative time limit extension requested |
St.27 status event code: U-3-3-T10-T11-oth-X000 |
|
| T11-X000 | Administrative time limit extension requested |
St.27 status event code: U-3-3-T10-T11-oth-X000 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U11-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-5-5-R10-R18-oth-X000 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-5-5-R10-R18-oth-X000 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-5-5-R10-R18-oth-X000 |
|
| R17-X000 | Change to representative recorded |
St.27 status event code: A-5-5-R10-R17-oth-X000 |
|
| PC1903 | Unpaid annual fee |
St.27 status event code: A-4-4-U10-U13-oth-PC1903 Not in force date: 20210324 Payment event data comment text: Termination Category : DEFAULT_OF_REGISTRATION_FEE |
|
| PC1903 | Unpaid annual fee |
St.27 status event code: N-4-6-H10-H13-oth-PC1903 Ip right cessation event data comment text: Termination Category : DEFAULT_OF_REGISTRATION_FEE Not in force date: 20210324 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-5-5-R10-R18-oth-X000 |