KR20170129571A - 로봇 청소기 - Google Patents
로봇 청소기 Download PDFInfo
- Publication number
- KR20170129571A KR20170129571A KR1020160060444A KR20160060444A KR20170129571A KR 20170129571 A KR20170129571 A KR 20170129571A KR 1020160060444 A KR1020160060444 A KR 1020160060444A KR 20160060444 A KR20160060444 A KR 20160060444A KR 20170129571 A KR20170129571 A KR 20170129571A
- Authority
- KR
- South Korea
- Prior art keywords
- pattern
- unit
- light
- image
- main body
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images









Classifications
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/28—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means
- A47L9/2836—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means characterised by the parts which are controlled
- A47L9/2852—Elements for displacement of the vacuum cleaner or the accessories therefor, e.g. wheels, casters or nozzles
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/28—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means
- A47L9/2805—Parameters or conditions being sensed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J11/00—Manipulators not otherwise provided for
- B25J11/008—Manipulators for service tasks
- B25J11/0085—Cleaning
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/02—Sensing devices
- B25J19/021—Optical sensing devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/02—Sensing devices
- B25J19/021—Optical sensing devices
- B25J19/023—Optical sensing devices including video camera means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/0003—Home robots, i.e. small robots for domestic use
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1656—Program controls characterised by programming, planning systems for manipulators
- B25J9/1664—Program controls characterised by programming, planning systems for manipulators characterised by motion, path, trajectory planning
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0231—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/20—Control system inputs
- G05D1/24—Arrangements for determining position or orientation
- G05D1/247—Arrangements for determining position or orientation using signals provided by artificial sources external to the vehicle, e.g. navigation beacons
- G05D1/249—Arrangements for determining position or orientation using signals provided by artificial sources external to the vehicle, e.g. navigation beacons from positioning sensors located off-board the vehicle, e.g. from cameras
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/60—Intended control result
- G05D1/617—Safety or protection, e.g. defining protection zones around obstacles or avoiding hazards
- G05D1/622—Obstacle avoidance
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L2201/00—Robotic cleaning machines, i.e. with automatic control of the travelling movement or the cleaning operation
- A47L2201/04—Automatic control of the travelling movement; Automatic obstacle detection
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D2105/00—Specific applications of the controlled vehicles
- G05D2105/10—Specific applications of the controlled vehicles for cleaning, vacuuming or polishing
-
- G05D2201/0215—
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Robotics (AREA)
- Physics & Mathematics (AREA)
- Aviation & Aerospace Engineering (AREA)
- Remote Sensing (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Radar, Positioning & Navigation (AREA)
- Multimedia (AREA)
- Electromagnetism (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
- Electric Vacuum Cleaner (AREA)
Abstract
Description
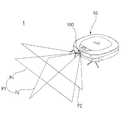
도 2는 도 1의 로봇 청소기의 수평 화각을 도시한 것이다.
도 3은 도 1의 로봇 청소기의 전면도이다.
도 4는 도 1의 로봇 청소기의 저면을 도시한 것이다.
도 5는 도 1의 로봇 청소기의 주요부들을 도시한 블록도이다.
도 6은 장애물 감지유닛의 전면도(a)와 측면도(b)이다.
도 7은 장애물 탐지 모듈의 조사 범위와 장애물 탐지 범위를 도시한 것이다.
도 8은 제 1 패턴 조사부를 칼리브레이션하는 과정에서 획득영상에 표시된 제 1 패턴 광을 도시한 것(a)과, 제 2 패턴 조사부를 칼리브레이션하는 과정에서 획득영상에 표시된 제 2 패턴 광을 도시한 것(b)이다.
도 9는 로봇 청소기가 제 1 위치에 있을 시, 전방에 장애물이 위치한 경우에 있어서의 획득영상을 도시한 것(a), 로봇 청소기의 위치가 변경되어 제 2 위치에 있을 시의 획득영상을 도시한 것(b)이다.
도 10은 장애물에 제 1 패턴 광과 제 2 패턴 광이 입사된 경우에 있어서의 획득영상을 도시한 것이다.
Claims (13)
- 청소구역을 주행하며, 청소구역 내 바닥의 이물질을 흡입하는 본체;
상기 본체의 전면에 배치되고, 상기 본체의 전방 하측을 향해 제 1 패턴의 광을 조사하는 제 1 패턴 조사부;
상기 본체의 전면에 배치되되, 상기 제 1 패턴 조사부의 하측에 배치되어, 상기 본체의 전방 상측을 향해 제 2 패턴의 광을 조사하는 제 2 패턴 조사부; 및
상기 본체의 전면에 배치되되, 상기 본체 전방의 영상을 획득하는 영상 획득부를 포함하는 로봇 청소기. - 제 1 항에 있어서,
상기 제 1 패턴 조사부, 상기 영상 획득부 및 상기 제 2 패턴 조사부는 일렬로 배치되는 로봇 청소기. - 제 1 항에 있어서,
상기 영상 획득부는,
상기 제 1 패턴 조사부와 상기 제 2 패턴 조사부 사이에 배치되는 로봇 청소기. - 제 3 항에 있어서,
상기 제 1 패턴 조사부와 상기 제 2 패턴 조사부는 상기 영상 획득부에 대해 대칭으로 배치되는 로봇 청소기. - 제 1 항 내지 제 4 항 중의 어느 한 항에 있어서,
상기 제 1 패턴 조사부와 상기 제 2 패턴 조사부는 동일한 크기의 수직 조사각으로 광을 조사하는 로봇 청소기. - 제 5 항에 있어서,
상기 수직 조사각은 20˚ 내지 30˚인 로봇 청소기. - 제 1 항에 있어서,
상기 영상 획득부는 렌즈의 주축이 수평으로 정렬되고, 100˚ 내지 110˚의 화각을 갖는 로봇 청소기. - 제 1 항에 있어서,
상기 제 1 패턴의 광은 수평선과 상기 수평선과 직교하는 수직선을 포함하는 패턴으로 구성되는 로봇 청소기. - 제 9 항에 있어서,
상기 제 2 패턴의 광은 수평선을 포함하는 패턴으로 구성되는 로봇 청소기. - 제 1 항에 있어서,
상기 제 1 패턴의 광과 상기 제 2 패턴의 광은 서로 다른 패턴으로 구성되는 로봇 청소기. - 제 1 항에 있어서,
상기 영상 획득부는,
상기 바닥에 대한 영상을 상기 본체로부터 거리가 110mm 내지 120mm 이상인 위치부터 획득하는 로봇 청소기. - 외관을 형성하는 케이싱;
상기 케이싱에 회전 가능하게 구비되는 좌륜 및 우륜;
상기 케이싱에 배치되어 청소구역 내 바닥의 이물질을 흡입하는 흡입 모듈; 및
상기 케이싱의 전면에 배치되는 장애물 감지유닛을 포함하고,
상기 장애물 감지유닛은,
상기 케이싱의 전면에 결합되는 모듈 프레임; 및
상기 모듈 프레임 상에 배치되는 제 1 패턴 조사부, 제 2 패턴 조사부 및 영상 획득부를 포함하고,
상기 제 1 패턴 조사부는,
상기 케이싱의 전방 하측을 향해 제 1 패턴의 광을 조사하고,
상기 제 2 패턴 조사부는,
상기 제 1 패턴 조사부의 하측에서 상기 케이싱의 전방 상측을 향해 제 2 패턴의 광을 조사하고,
상기 영상 획득부는,
상기 케이싱의 전방의 영상을 획득하는 로봇 청소기. - 제 12 항에 있어서,
상기 영상 획득부는,
상기 제 1 패턴 조사부와 상기 제 2 패턴 조사부 사이에 배치되는 로봇 청소기.
Priority Applications (22)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020160060444A KR101917116B1 (ko) | 2016-05-17 | 2016-05-17 | 로봇 청소기 |
| CN201720543800.7U CN207979622U (zh) | 2016-05-17 | 2017-05-16 | 机器人吸尘器 |
| TW106116158A TWI652034B (zh) | 2016-05-17 | 2017-05-16 | 清掃機器人 |
| TW106116151A TWI689387B (zh) | 2016-05-17 | 2017-05-16 | 行動機器人 |
| TW106116156A TWI639021B (zh) | 2016-05-17 | 2017-05-16 | 行動機器人及其控制方法 |
| TW106116154A TWI653964B (zh) | 2016-05-17 | 2017-05-16 | 行動機器人及其控制方法 |
| PCT/KR2017/005132 WO2017200302A2 (ko) | 2016-05-17 | 2017-05-17 | 이동 로봇 및 그 제어방법 |
| US15/597,333 US10456004B2 (en) | 2016-05-17 | 2017-05-17 | Mobile robot |
| EP17799659.2A EP3459688B1 (en) | 2016-05-17 | 2017-05-17 | Mobile robot and control method therefor |
| EP17799662.6A EP3459691B1 (en) | 2016-05-17 | 2017-05-17 | Robot vacuum cleaner |
| US15/597,531 US10349798B2 (en) | 2016-05-17 | 2017-05-17 | Mobile robot and method of controlling the same |
| EP17799660.0A EP3459689B1 (en) | 2016-05-17 | 2017-05-17 | Mobile robot and control method therefor |
| PCT/KR2017/005135 WO2017200304A2 (ko) | 2016-05-17 | 2017-05-17 | 이동 로봇 및 그 제어방법 |
| EP17799661.8A EP3459690B1 (en) | 2016-05-17 | 2017-05-17 | Mobile robot and control method therefor |
| US15/597,418 US10517456B2 (en) | 2016-05-17 | 2017-05-17 | Mobile robot and method of controlling the same |
| JP2018560524A JP2019516483A (ja) | 2016-05-17 | 2017-05-17 | ロボット掃除機 |
| AU2017267155A AU2017267155B2 (en) | 2016-05-17 | 2017-05-17 | Robot vacuum cleaner |
| PCT/KR2017/005136 WO2017200305A1 (ko) | 2016-05-17 | 2017-05-17 | 로봇 청소기 |
| RU2018144340A RU2719222C1 (ru) | 2016-05-17 | 2017-05-17 | Робот-пылесос |
| PCT/KR2017/005133 WO2017200303A2 (ko) | 2016-05-17 | 2017-05-17 | 이동 로봇 및 그 제어방법 |
| US15/597,670 US10656656B2 (en) | 2016-05-17 | 2017-05-17 | Mobile robot and method for controlling and detecting inclination using pattern light |
| KR1020180129189A KR102430113B1 (ko) | 2016-05-17 | 2018-10-26 | 로봇 청소기 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020160060444A KR101917116B1 (ko) | 2016-05-17 | 2016-05-17 | 로봇 청소기 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020180129189A Division KR102430113B1 (ko) | 2016-05-17 | 2018-10-26 | 로봇 청소기 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20170129571A true KR20170129571A (ko) | 2017-11-27 |
| KR101917116B1 KR101917116B1 (ko) | 2018-11-09 |
Family
ID=60810671
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020160060444A Active KR101917116B1 (ko) | 2016-05-17 | 2016-05-17 | 로봇 청소기 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR101917116B1 (ko) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019199098A1 (en) * | 2018-04-13 | 2019-10-17 | Lg Electronics Inc. | Robot cleaner |
| WO2019221523A1 (ko) * | 2018-05-16 | 2019-11-21 | 엘지전자 주식회사 | 청소기 및 그 제어방법 |
| KR20210104000A (ko) * | 2019-03-12 | 2021-08-24 | 베어 로보틱스, 인크. | 음식 및/또는 음료의 서빙을 위한 로봇 |
| CN114326712A (zh) * | 2021-12-06 | 2022-04-12 | 云鲸智能科技(东莞)有限公司 | 机器人的导航路径生成方法、机器人、装置以及存储介质 |
| CN114714352A (zh) * | 2020-12-29 | 2022-07-08 | 上海擎朗智能科技有限公司 | 机器人位姿信息确定方法、装置、设备及存储介质 |
| US20220371284A1 (en) * | 2021-05-07 | 2022-11-24 | New York University | Display guided high-accuracy robotic navigation and motion control system and methods |
| US11814155B2 (en) | 2018-12-05 | 2023-11-14 | Sony Group Corporation | Control apparatus and control method for specular object detection based on an unmanned aerial vehicle's reflection |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4954962A (en) | 1988-09-06 | 1990-09-04 | Transitions Research Corporation | Visual navigation and obstacle avoidance structured light system |
| US9002511B1 (en) * | 2005-10-21 | 2015-04-07 | Irobot Corporation | Methods and systems for obstacle detection using structured light |
| JP5709009B2 (ja) * | 2011-11-17 | 2015-04-30 | Ckd株式会社 | 三次元計測装置 |
-
2016
- 2016-05-17 KR KR1020160060444A patent/KR101917116B1/ko active Active
Cited By (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019199098A1 (en) * | 2018-04-13 | 2019-10-17 | Lg Electronics Inc. | Robot cleaner |
| KR20190130177A (ko) * | 2018-04-13 | 2019-11-22 | 엘지전자 주식회사 | 로봇 청소기 |
| WO2019221523A1 (ko) * | 2018-05-16 | 2019-11-21 | 엘지전자 주식회사 | 청소기 및 그 제어방법 |
| KR20190134925A (ko) * | 2018-05-16 | 2019-12-05 | 엘지전자 주식회사 | 청소기 및 그 제어방법 |
| US12059115B2 (en) | 2018-05-16 | 2024-08-13 | Lg Electronics Inc. | Cleaner and method for controlling same |
| US11814155B2 (en) | 2018-12-05 | 2023-11-14 | Sony Group Corporation | Control apparatus and control method for specular object detection based on an unmanned aerial vehicle's reflection |
| KR20210104000A (ko) * | 2019-03-12 | 2021-08-24 | 베어 로보틱스, 인크. | 음식 및/또는 음료의 서빙을 위한 로봇 |
| CN114714352A (zh) * | 2020-12-29 | 2022-07-08 | 上海擎朗智能科技有限公司 | 机器人位姿信息确定方法、装置、设备及存储介质 |
| CN114714352B (zh) * | 2020-12-29 | 2024-04-26 | 上海擎朗智能科技有限公司 | 机器人位姿信息确定方法、装置、设备及存储介质 |
| US20220371284A1 (en) * | 2021-05-07 | 2022-11-24 | New York University | Display guided high-accuracy robotic navigation and motion control system and methods |
| US12384115B2 (en) * | 2021-05-07 | 2025-08-12 | New York University | Display guided high-accuracy robotic navigation and motion control system and methods |
| CN114326712A (zh) * | 2021-12-06 | 2022-04-12 | 云鲸智能科技(东莞)有限公司 | 机器人的导航路径生成方法、机器人、装置以及存储介质 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR101917116B1 (ko) | 2018-11-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101917116B1 (ko) | 로봇 청소기 | |
| AU2017267155B2 (en) | Robot vacuum cleaner | |
| US10656656B2 (en) | Mobile robot and method for controlling and detecting inclination using pattern light | |
| US20170332872A1 (en) | Mobile robot and method of controlling the same | |
| US10255501B2 (en) | Robot cleaner and method for controlling the same | |
| KR102147207B1 (ko) | 이동 로봇 및 그 제어방법 | |
| KR102070283B1 (ko) | 청소기 및 그 제어방법 | |
| JP2014048842A (ja) | 自律移動型機器 | |
| KR20130002218A (ko) | 로봇 청소기 및 그 제어방법 | |
| KR102048364B1 (ko) | 로봇 청소기 | |
| KR102167898B1 (ko) | 이동 로봇 및 그 제어방법 | |
| KR102147208B1 (ko) | 이동 로봇 및 그 제어방법 | |
| JP7042031B2 (ja) | 自律走行型掃除機、及び、自律走行型掃除機と充電台とを有するシステム | |
| KR20190003846A (ko) | 이동 로봇 및 그 제어방법 | |
| JP2020047188A (ja) | 自律走行掃除機 | |
| KR20180121441A (ko) | 로봇 청소기 | |
| KR20180133829A (ko) | 이동 로봇 및 그 제어방법 | |
| JP2020052601A (ja) | 自律走行掃除機及び制御方法 | |
| KR102428214B1 (ko) | 이동 로봇 및 그 제어방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| PA0109 | Patent application |
St.27 status event code: A-0-1-A10-A12-nap-PA0109 |
|
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| D13-X000 | Search requested |
St.27 status event code: A-1-2-D10-D13-srh-X000 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| D14-X000 | Search report completed |
St.27 status event code: A-1-2-D10-D14-srh-X000 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| T11-X000 | Administrative time limit extension requested |
St.27 status event code: U-3-3-T10-T11-oth-X000 |
|
| E13-X000 | Pre-grant limitation requested |
St.27 status event code: A-2-3-E10-E13-lim-X000 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| A107 | Divisional application of patent | ||
| PA0107 | Divisional application |
St.27 status event code: A-0-1-A10-A18-div-PA0107 St.27 status event code: A-0-1-A10-A16-div-PA0107 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U11-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-5-5-R10-R13-asn-PN2301 St.27 status event code: A-5-5-R10-R11-asn-PN2301 |
|
| FPAY | Annual fee payment |
Payment date: 20211008 Year of fee payment: 4 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 4 |
|
| FPAY | Annual fee payment |
Payment date: 20221007 Year of fee payment: 5 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 5 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 6 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 7 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |