KR20170129795A - 지구 중간 궤도 위성 통신 시스템들을 위한 저비용 무전선 지상 스테이션 안테나 - Google Patents
지구 중간 궤도 위성 통신 시스템들을 위한 저비용 무전선 지상 스테이션 안테나 Download PDFInfo
- Publication number
- KR20170129795A KR20170129795A KR1020177027866A KR20177027866A KR20170129795A KR 20170129795 A KR20170129795 A KR 20170129795A KR 1020177027866 A KR1020177027866 A KR 1020177027866A KR 20177027866 A KR20177027866 A KR 20177027866A KR 20170129795 A KR20170129795 A KR 20170129795A
- Authority
- KR
- South Korea
- Prior art keywords
- signals
- power
- data
- link
- plate
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images



Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04B—TRANSMISSION
- H04B7/00—Radio transmission systems, i.e. using radiation field
- H04B7/14—Relay systems
- H04B7/15—Active relay systems
- H04B7/185—Space-based or airborne stations; Stations for satellite systems
- H04B7/1851—Systems using a satellite or space-based relay
- H04B7/18517—Transmission equipment in earth stations
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01Q—ANTENNAS, i.e. RADIO AERIALS
- H01Q3/00—Arrangements for changing or varying the orientation or the shape of the directional pattern of the waves radiated from an antenna or antenna system
- H01Q3/12—Arrangements for changing or varying the orientation or the shape of the directional pattern of the waves radiated from an antenna or antenna system using mechanical relative movement between primary active elements and secondary devices of antennas or antenna systems
- H01Q3/16—Arrangements for changing or varying the orientation or the shape of the directional pattern of the waves radiated from an antenna or antenna system using mechanical relative movement between primary active elements and secondary devices of antennas or antenna systems for varying relative position of primary active element and a reflecting device
- H01Q3/18—Arrangements for changing or varying the orientation or the shape of the directional pattern of the waves radiated from an antenna or antenna system using mechanical relative movement between primary active elements and secondary devices of antennas or antenna systems for varying relative position of primary active element and a reflecting device wherein the primary active element is movable and the reflecting device is fixed
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01Q—ANTENNAS, i.e. RADIO AERIALS
- H01Q1/00—Details of, or arrangements associated with, antennas
- H01Q1/12—Supports; Mounting means
- H01Q1/125—Means for positioning
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01Q—ANTENNAS, i.e. RADIO AERIALS
- H01Q1/00—Details of, or arrangements associated with, antennas
- H01Q1/12—Supports; Mounting means
- H01Q1/22—Supports; Mounting means by structural association with other equipment or articles
- H01Q1/2291—Supports; Mounting means by structural association with other equipment or articles used in Bluetooth® or Wi-Fi® devices of Wireless Local Area Networks [WLAN]
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01Q—ANTENNAS, i.e. RADIO AERIALS
- H01Q19/00—Combinations of primary active antenna elements and units with secondary devices, e.g. with quasi-optical devices, for giving the antenna a desired directional characteristic
- H01Q19/10—Combinations of primary active antenna elements and units with secondary devices, e.g. with quasi-optical devices, for giving the antenna a desired directional characteristic using reflecting surfaces
- H01Q19/12—Combinations of primary active antenna elements and units with secondary devices, e.g. with quasi-optical devices, for giving the antenna a desired directional characteristic using reflecting surfaces wherein the surfaces are concave
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01Q—ANTENNAS, i.e. RADIO AERIALS
- H01Q3/00—Arrangements for changing or varying the orientation or the shape of the directional pattern of the waves radiated from an antenna or antenna system
- H01Q3/12—Arrangements for changing or varying the orientation or the shape of the directional pattern of the waves radiated from an antenna or antenna system using mechanical relative movement between primary active elements and secondary devices of antennas or antenna systems
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01Q—ANTENNAS, i.e. RADIO AERIALS
- H01Q7/00—Loop antennas with a substantially uniform current distribution around the loop and having a directional radiation pattern in a plane perpendicular to the plane of the loop
Landscapes
- Engineering & Computer Science (AREA)
- Computer Networks & Wireless Communication (AREA)
- Physics & Mathematics (AREA)
- Astronomy & Astrophysics (AREA)
- Aviation & Aerospace Engineering (AREA)
- General Physics & Mathematics (AREA)
- Signal Processing (AREA)
- Variable-Direction Aerials And Aerial Arrays (AREA)
- Details Of Aerials (AREA)
- Support Of Aerials (AREA)
- Radio Relay Systems (AREA)
- Aerials With Secondary Devices (AREA)
Abstract
이동형 피드 플레이트를 포함하는 지상 스테이션 안테나가 본원에서 설명되며, 이동형 피드 플레이트 상에 제 1 전력 전달 유닛이 배치된다. 지상 스테이션 안테나는 고정형 플레이트를 또한 포함한다. 이동형 피드 플레이트는 고정형 플레이트에 대하여 회전하도록 구성된다. 고정형 플레이트는 제 2 전력 전달 유닛을 갖는다. 제 1 전력 전달 유닛 및 제 2 전력 전달 유닛은, 충전 링크를 통해 서로 간에 변조된 전력 신호들을 송신 및 수신하도록 구성된다. 변조된 전력 신호들은 무선 충전 전력 및 데이터 신호들을 포함한다.
Description
[0001]
본 출원은, 2015년 4월 3일자로 출원되고 그 전체가 인용에 의해 본원에 포함되는, 가출원인 미국 출원 제 62/142,959호를 우선권으로 주장한다.
[0002]
본 개시내용은 일반적으로 위성 통신 시스템들에 관한 것이다. 더 구체적으로, 본 개시내용은, 지구 중간 궤도(medium earth orbit) 위성 통신 시스템들에 대한 저비용 무전선(cableless) 지상 스테이션 안테나들에 관한 것이다.
[0003]
지구 중궤도(mid-earth orbit)(또는 지구 중간 궤도(MEO))들에 있는 비-정지궤도(non-geostationary) 위성들을 추적하도록 설계되는 지상 스테이션 안테나들은 종종, 고-이득 포물면 반사기-타입(parabolic reflector-type) 안테나들이다. 포물면 반사기들은 좁은 빔 폭들 및 더 높은 이득을 제공하며, 위성들과의 통신을 유지하도록 겨냥(point)된다. 반사기의 이동은, 크고 무거운 안테나 접시(dish) 구조물의 이동을 수행하는 비싸고 복잡한 기계적으로-구동되는 짐벌형(gimbaled) 시스템들로 수행될 수 있다.
[0004]
MEO 위성들의 궤도 역학(dynamic)들 때문에, 2개의 위성들과의 동시 통신은 중단되지 않는 서비스를 제공한다. 하나의 위성이 지상 스테이션의 관측시야(field of view)를 벗어나는 경우, 다른 위성이 관측시야에 진입한다. 이것은 종종, 시스템이 2개의 복잡하고 비싼 짐벌형 반사기 시스템들을 사용하는 것을 초래한다. 유사한 접근법은 고정 위상형(fixed phased) 어레이 안테나를 사용하지만, 빔들을 스티어링(steer)하기 위한 빔 포밍(beam forming) 전자기기들의 비용 및 복잡도는 비싸고 복잡하다. 게다가, 고정 위상형 어레이 안테나 솔루션들의 경우, 빔이 조준(bore sight) 방향으로부터 멀리서 스캔되는 경우에는 빔 패턴 형상이 왜곡되거나 넓어져서, FCC(Federal Communications Commission) 또는 ITU(International Telecommunications Union)와 같은 다양한 규제 기관들에 의해 부과되는 위성 통신(SATCOM) 지상 스테이션 안테나들에 대한 패턴 규격들을 충족시키는 것을 어렵게 한다.
[0005]
본 개시내용의 양상에 따른 지상 스테이션 안테나는, 반사기 앞의 초점 아크(focal arc)를 따라 다수의 피드 포인트(feed point)들을 갖는 토러스 형상(torus shaped) 반사기를 포함한다. 그러한 양상에서의 지상 스테이션 안테나는, 회전형(rotating) 피드 플랫폼에 의해 지지되고 그리고 초점 아크 상에 로케이팅되는 전기적 위상 중심들을 갖는 트랜시버 피드들을 더 포함한다. 트랜시버 피드들은 플랫폼이 회전하는 경우 상승 및 하강 위성들을 동시에 추적하도록 구성된다. 그러한 양상에서의 지상 스테이션 안테나는, 트랜시버 피드들에 전력을 공급하기 위해 트랜시버 피드들에 커플링되는 무선 전력 수신기를 더 포함한다. 그러한 양상에서의 지상 스테이션 안테나는, 후속 프로세싱을 수행하기 위해 베이스(base) 유닛과 신호들을 통신하기 위해서 트랜시버 피드들에 커플링되는 무선 신호 인터페이스를 더 포함한다.
[0006]
본 개시내용의 다른 양상에 따른 지상 스테이션 안테나는, 초점 아크에 따른 다수의 피드 포인트들을 통해 신호를 반사하기 위한 수단을 포함한다. 그러한 양상에서의 지상 스테이션 안테나는, 상승 및 하강 위성들을 동시에 추적하기 위한 수단을 더 포함한다. 그러한 양상에서의 지상 스테이션 안테나는, 초점 아크를 따라 추적 수단을 회전시키기 위한 수단을 더 포함한다. 회전 수단은 추적 수단에 커플링된다. 지상 스테이션 안테나는, 추적 수단에 무선으로 전력을 공급하기 위한 수단을 더 포함한다. 지상 스테이션 안테나는, 후속 프로세싱을 수행하기 위해 추적 수단으로부터 베이스 유닛으로 신호들을 무선으로 통신하기 위한 수단을 더 포함한다.
[0007]
본 개시내용의 다른 양상에 따른, 반사기 앞의 초점 아크를 따라 다수의 피드 포인트들을 갖춘 토러스 형상 반사기를 갖는 지상 스테이션 안테나를 사용하는 무선 통신 방법은, 초점 아크를 따라 트랜시버 피드들을 회전시킴으로써 상승 및 하강 위성들을 동시에 추적하는 단계를 포함한다. 트랜시버 피드들은 초점 아크 상에 로케이팅되는 그들의 전기적 위상 중심들을 갖는다. 방법은, 트랜시버 피드들에 무선으로 전력을 공급하는 단계를 더 포함한다. 방법은, 후속 프로세싱을 수행하기 위해 트랜시버 피드들과 베이스 유닛 사이에서 신호들을 무선으로 통신하는 단계를 더 포함한다.
[0008]
본 개시내용의 다른 양상에 따른, 반사기 앞의 초점 아크를 따라 다수의 피드 포인트들을 갖춘 토러스 형상 반사기를 갖는 지상 스테이션 안테나를 사용하는 무선 통신을 위해 구성되는 컴퓨터 프로그램 제품은, 프로그램 코드들이 기록된 비-일시적인 컴퓨터-판독가능 매체를 포함한다. 프로그램 코드는, 초점 아크를 따라 트랜시버 피드들을 회전시킴으로써 상승 및 하강 위성들을 동시에 추적하기 위한 프로그램 코드를 포함한다. 트랜시버 피드들은 초점 아크 상에 로케이팅되는 그들의 전기적 위상 중심들을 갖는다. 프로그램 코드는 또한, 트랜시버 피드들에 무선으로 전력을 공급하기 위한 코드를 포함한다. 프로그램 코드는 또한, 후속 프로세싱을 수행하기 위해 트랜시버 피드들과 베이스 유닛 사이에서 신호들을 무선으로 통신하기 위한 코드를 포함한다.
[0009]
이것은, 후속하는 상세한 설명이 더 완전하게 이해될 수 있도록 하기 위해, 본 개시내용의 특성들 및 기술적 이점들을 다소 광범위하게 약술하였다. 본 개시내용의 부가적인 특성들 및 이점들은 아래에서 설명될 것이다. 본 개시내용의 동일한 목적들을 수행하기 위해 다른 구조들을 변형 또는 설계하기 위한 기반으로서 본 개시내용이 용이하게 이용될 수 있음이 당업자들에 의해 인식되어야 한다. 또한, 그러한 등가 구성들이, 첨부된 청구항들에 기재된 바와 같은 본 개시내용의 교시들을 벗어나지 않는다는 것이 당업자들에 의해 인지되어야 한다. 추가적인 목적들 및 이점들과 함께, 본 개시내용의 구성 및 동작 방법 둘 모두에 대해 본 개시내용의 특징인 것으로 믿어지는 신규한 특성들은, 첨부된 도면들과 관련하여 고려될 경우 다음의 설명으로부터 더 완전하게 이해될 것이다. 그러나, 도면들 각각이 단지 예시 및 설명의 목적을 위해 제공되며, 본 개시내용의 제한들의 정의로서 의도되지 않음이 명백히 이해될 것이다.
[0010]
몇몇 실시예들에서, 지상 스테이션 안테나는, 이동형(moving) 피드 플레이트, 이동형 피드 플레이트 상에 배치되는 제 1 전력 전달 유닛, 고정형 플레이트 ― 이동형 피드 플레이트는, 고정형 플레이트에 대하여 회전하도록 구성됨 ―, 및 고정형 플레이트 상에 배치되는 제 2 전력 전달 유닛을 포함하며, 여기서, 제 1 전력 전달 유닛 및 제 2 전력 전달 유닛은, 충전(charging) 링크를 통해 서로 간에 변조된 전력 신호들을 통신하도록 구성되고, 변조된 전력 신호들은 무선 충전 전력 신호들 및 데이터 신호들을 포함한다.
[0011]
몇몇 실시예들에서, 지상 스테이션 안테나는, 이동형 피드 플레이트 상에 배치되는 제 1 세트의 전자기기들 및 고정형 플레이트 상에 배치되는 제 2 세트의 전자기기들을 더 포함하며, 여기서, 제 1 세트의 전자기기들 및 제 2 세트의 전자기기들은 데이터 통신 링크를 통해 서로 데이터 신호들을 통신하도록 구성된다.
[0012]
몇몇 실시예들에서, 데이터 통신 링크 및 충전 링크는 상이한 링크들이다.
[0013]
몇몇 실시예들에서, 데이터 통신 링크는 제 1 타입의 데이터 신호들을 통신하는데 사용되고, 충전 링크는 제 2 타입의 데이터 신호들을 통신하는데 사용된다.
[0014]
몇몇 실시예들에서, 제 1 타입의 데이터 신호들은 컨텐츠(content) 데이터를 포함한다.
[0015]
몇몇 실시예들에서, 제 2 타입의 데이터 신호들은, 모터 제어 커맨드 신호들, 헬스(health)/유지보수 정보, 전력 분배, 온도 센서 신호들, 습도 센서 신호들, 장애(failure) 모드들, 구조적 무결성(integrity) 센서 데이터, 또는 환경 센서 데이터 중 적어도 하나를 포함한다.
[0016]
몇몇 실시예들에서, 제 2 타입의 데이터 신호들은 컨텐츠 데이터를 포함한다.
[0017]
몇몇 실시예들에서, 제 2 타입의 데이터 신호들은 지상 스테이션 안테나의 컴포넌트들을 제어하는데 사용되는 데이터 신호들을 포함한다.
[0018]
몇몇 실시예들에서, 충전 링크는 데이터 통신 링크로부터 데이터 신호들을 오프로드(offload)한다.
[0019]
몇몇 실시예들에서, 데이터 통신 링크는 Bluetooth 링크, WiFi 링크, 또는 광학 링크이다.
[0020]
몇몇 실시예들에서, 충전 전력 신호들, 및 변조된 전력 신호들과 연관된 데이터 신호들은 동시에 통신된다.
[0021]
몇몇 실시예들에서, 충전 링크의 데이터 신호들과 연관된 제 1 데이터 레이트(rate)는 데이터 통신 링크의 데이터 신호들과 연관된 제 2 데이터 레이트보다 느리다.
[0022]
몇몇 실시예들에서, 제 1 전력 전달 유닛은 제 1 루프를 포함한다. 제 2 전력 전달 유닛은 제 2 루프를 포함한다. 제 1 루프 및 제 2 루프 각각은 서로 유도성으로 커플링되는 유도성 루프이다.
[0023]
다양한 실시예들에서, 청구항 제 1 항의 지상 스테이션 안테나는, 이동형 피드 플레이트 상에 배치되는 이동형 통신 컴포넌트 ― 이동형 통신 컴포넌트는 제 1 프로세서를 포함함 ―, 고정형 플레이트 상에 배치되는 고정형 통신 컴포넌트를 더 포함한다. 고정형 통신 컴포넌트는 제 2 프로세서를 포함한다.
[0024]
몇몇 실시예들에서, 이동형 통신 컴포넌트는, 제 1 전력 전달 유닛을 통해 충전 링크를 거쳐 수신되는 데이터 신호들을 디코딩하거나 제 1 전력 전달 유닛을 통해 충전 링크를 거쳐 송신되는 데이터 신호들을 인코딩하도록 구성된다.
[0025]
몇몇 실시예들에서, 이동형 통신 컴포넌트는 모터에 커플링된다. 이동형 통신 컴포넌트는 모터 제어 신호들을 모터에 통신한다.
[0026]
몇몇 실시예들에서, 고정형 통신 컴포넌트는, 제 2 전력 전달 유닛을 통해 충전 링크를 거쳐 수신되는 데이터 신호들을 디코딩하거나 제 2 전력 전달 유닛을 통해 충전 링크를 거쳐 송신되는 데이터 신호들을 인코딩하도록 구성된다.
[0027]
몇몇 실시예들에서, 고정형 통신 컴포넌트는 모터에 커플링된다. 고정형 통신 컴포넌트는 모터 제어 신호들을 모터에 통신한다.
[0028]
다양한 실시예들에서, 지상 스테이션 안테나를 제공하기 위한 방법은, 이동형 피드 플레이트를 제공하는 단계, 이동형 피드 플레이트 상에 배치되는 제 1 전력 전달 유닛을 제공하는 단계, 고정형 플레이트를 제공하는 단계 ― 이동형 피드 플레이트는 고정형 플레이트에 대하여 회전하도록 구성됨 ―, 및 고정형 플레이트 상에 배치되는 제 2 전력 전달 유닛을 제공하는 단계를 포함한다. 제 1 전력 전달 유닛 및 제 2 전력 전달 유닛은, 충전 링크를 통해 서로 간에 변조된 전력 신호들을 통신하도록 구성된다. 변조된 전력 신호들은 무선 충전 전력 신호들 및 데이터 신호들을 포함한다.
[0029]
몇몇 실시예들에서, 지상 스테이션 안테나는, 이동형 피드 플레이트를 제공하기 위한 수단, 이동형 피드 플레이트 상에 배치되는 제 1 전력 전달 유닛을 제공하기 위한 수단, 고정형 플레이트를 제공하기 위한 수단 ― 이동형 피드 플레이트는 고정형 플레이트에 대하여 회전하도록 구성됨 ―, 및 고정형 플레이트 상에 배치되는 제 2 전력 전달 유닛을 제공하기 위한 수단을 포함한다. 제 1 전력 전달 유닛을 제공하기 위한 수단 및 제 2 전력 전달 유닛을 제공하기 위한 수단은, 충전 링크를 통해 서로 간에 변조된 전력 신호들을 통신하도록 구성된다. 변조된 전력 신호들은 무선 충전 전력 신호들 및 데이터 신호들을 포함한다.
[0030]
본 개시내용의 보다 완전한 이해를 위해, 첨부된 도면들과 함께 해석되는 다음의 설명에 대한 참조가 이제 이루어진다.
[0031] 도 1은 형상화된 반사기 안테나를 예시하는 도면이다.
[0032] 도 2는 본 개시내용의 양상에 따른 형상화된 반사기 안테나를 예시하는 도면이다.
[0033] 도 3은 본 개시내용의 양상이 유리하게 이용될 수 있는 예시적인 무선 통신 시스템을 도시하는 도면이다.
[0034] 도 4는 본 개시내용의 일 양상에 따른 프로세스 선도(chart)를 예시하는 블록도이다.
[0035] 도 5는 본 개시내용의 양상에 따른, 이동형 피드 플레이트 및 고정형 플레이트를 포함하는 통신 시스템의 예를 예시하는 도면이다.
[0031] 도 1은 형상화된 반사기 안테나를 예시하는 도면이다.
[0032] 도 2는 본 개시내용의 양상에 따른 형상화된 반사기 안테나를 예시하는 도면이다.
[0033] 도 3은 본 개시내용의 양상이 유리하게 이용될 수 있는 예시적인 무선 통신 시스템을 도시하는 도면이다.
[0034] 도 4는 본 개시내용의 일 양상에 따른 프로세스 선도(chart)를 예시하는 블록도이다.
[0035] 도 5는 본 개시내용의 양상에 따른, 이동형 피드 플레이트 및 고정형 플레이트를 포함하는 통신 시스템의 예를 예시하는 도면이다.
[0036]
첨부된 도면들과 관련하여 아래에 기재되는 상세한 설명은, 다양한 구성들의 설명으로서 의도되며, 본원에 설명된 개념들이 실시될 수 있는 유일한 구성들만을 표현하도록 의도되지 않는다. 상세한 설명은 다양한 개념들의 철저한 이해를 제공할 목적으로 특정 세부사항들을 포함한다. 그러나, 이들 개념들이 이러한 특정 세부사항들 없이도 실시될 수 있다는 것은 당업자들에게 명백할 것이다. 몇몇 예시들에서, 이러한 개념들을 불명료하게 하는 것을 회피하기 위해, 잘 알려진 구조들 및 컴포넌트들은 블록도 형태로 도시되어 있다. 본원에서 설명되는 바와 같이, 용어 "및/또는"의 사용은 "내포적 또는"을 표현하도록 의도되며, 용어 "또는"의 사용은 "배타적 또는"을 표현하도록 의도된다.
[0037]
포물면 반사기들은 좁은 빔 폭들 및 더 높은 이득을 제공하며, 위성들과의 통신을 유지하도록 겨냥된다. 반사기의 이동은, 크고 무거운 안테나 접시 구조물의 이동을 수행하는 비싸고 복잡한 기계적으로-구동되는 짐벌형 시스템들로 수행될 수 있다. 게다가, 고정 위상형 어레이 안테나 솔루션들의 경우, 빔이 조준(bore sight) 방향으로부터 멀리서 스캔되는 경우에는 빔 패턴 형상이 왜곡되거나 넓어져서, FCC(Federal Communications Commission) 또는 ITU(International Telecommunications Union)와 같은 다양한 규제 기관들에 의해 부과되는 위성 통신(SATCOM) 지상 스테이션 안테나들에 대한 패턴 규격들을 충족시키는 것을 어렵게 한다.
[0038]
본 개시내용의 일 양상에 따르면, 특수하게-형상화된 고정형 반사기 안테나 또는 형상화된 반사기 안테나가 제공된다. 형상화된 반사기 안테나는, 고-품질, 동시 스캔가능 듀얼(dual) 안테나 빔들을 허용한다. 일 구성에서, 형상화된 반사기 안테나의 성능은 빔 스캔 각도와 무관하다. 게다가, 형상화된 반사기 안테나의 이러한 구성은, 복잡한 기계적으로-구동되는 짐벌형 시스템들 및/또는 고정 위상형 어레이 안테나 솔루션들과 같은 다른 시스템들에 비해 더 낮은 비용 및 복잡도로 달성된다.
[0039]
도 1은 형상화된 반사기 안테나를 예시하는 도면이다. 이러한 구성에서, 위성(108)과 통신하기 위해 사용될 수 있는 안테나(100)는, 반사기(102), 엘리먼트(104), 및 구조물(106)을 포함한다. 반사기(102)는, 포커싱(focus)된 빔 패턴(110)을 생성하기 위해 반사기(102)(예컨대, 포물면 반사기)의 포커스에 또는 그 근처에 엘리먼트(104)가 배치될 수 있도록 포물면일 수 있다. 위성(108)이 지구동기적(geosynchronous)(또는 정지궤도)이면, 구조물(106)은 단지 안테나(100)를 지지한다. 그러나, 위성(108)이 경로(112)를 따라 이동하면, 안테나(100)는, 포커싱된 빔 패턴(110) 방향을 위성(108)의 경로(112)와 대략적으로 매칭(match)되게 유지하도록 이동된다.
[0040]
구조물(106)은, 안테나(100)와 위성(108) 사이의 통신들을 유지하기 위해, 포커싱된 빔 패턴(110)을 제 1 포지션(114) 및 제 2 포지션(116)으로 이동시키는 기계적/전기적 디바이스들을 포함할 수 있다. 안테나(100)의 이득 및 겨냥(pointing) 규격들이 증가하는 경우, 구조물(106)은 엄청나게 비싸진다. 시스템에서 다수의 위성들이 추적되는 경우, 통신 비용들은 훨씬 더 비용이 많이 들게 된다.
[0041]
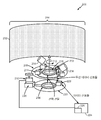
도 2는 본 개시내용의 양상에 따른 형상화된 안테나 반사기(202)를 포함하는 안테나(200)를 예시한다. 이러한 구성에서, 형상화된 안테나 반사기(202)는, 이동형 피드 플레이트(208)에 커플링되는 피드 혼(feed horn)(204) 및 피드 혼(206)에 의해 선택적으로 일루미네이팅(illuminate)된다. 피드 혼들(204 및 206)은 트랜시버들, 수신기들, 또는 송신기들일 수 있거나, 또는 다이플렉서(diplexer) 또는 다른 신호 분할(splitting)/결합(combining) 장치를 통해 트랜시버들, 수신기들, 또는 송신기들에 커플링될 수 있다. 이동형 피드 플레이트(208)는 모터 드라이브(210)에 의해 움직이게 될 수 있다. 모터 드라이브(210)는 전력 공급부(230) 또는 다른 전력원(도시되지 않음)에 커플링될 수 있다. 이동형 피드 플레이트(208)는 축(212) 주위를 회전할 수 있다.
[0042]
이동형 피드 플레이트(208)가 축(212) 주위를 회전하거나 또는 이와 달리 다른 방식으로 이동하는 경우, 피드 혼(204) 및 피드 혼(206)은 형상화된 안테나 반사기(202)로 선택적으로 겨냥된다. 피드 혼(204) 및 피드 혼(206)의 전기적 중심들, 또는 조준들, 또는 다른 형태의 정렬이, 형상화된 안테나 반사기(202)로 겨냥될 수 있다(예컨대, 반사기(202)가 "일루미네이팅됨" 또는 반사기(202)를 "일루미네이팅함"). 대안적으로, 피드 혼들(204 또는 206) 중 하나 또는 그 초과는, 이동형 피드 플레이트(208) 상의 그들의 포지션들 때문에, 형상화된 안테나 반사기(202)를 벗어나게 겨냥될 수 있다. 형상화된 안테나 반사기(202)의 형상을 설계함으로써, 피드 혼(204) 및 피드 혼(206)은 각각 통신을 위한 안테나 빔을 생성할 수 있다. 이동형 피드 플레이트(208)가 피드 혼(204) 및 피드 혼(206)을 이동시키고, 그에 따라, 피드 혼들(204 및 206)의 전기적 중심들 또는 조준들을 이동시키기 때문에, 피드 혼들에 의해 생성되는 안테나 빔들 또한 이동된다. 본 개시내용에서의 안테나 빔들의 이동은, 형상화된 안테나 반사기(202)를 이동시키기 위한 비싼 구조물들(예컨대, 구조물들(106)) 없이도 도 1에 설명된 포커싱된 빔 패턴(110)의 이동과 유사하다. 안테나(200)의 비용들은 다수의 안테나들(100)에 비해 감소될 수 있다.
[0043]
반사기(202)는 오프셋(offset) 피드 반사기 또는 프라임(prime) 포커스 반사기일 수 있다. 프라임 포커스 반사기는 반사기(202) 바로 앞에 피드 혼들(204 및 206)을 갖는다. 프라임 포커스 반사기는 빔 패턴에서의 약간의 악화(deterioration)를 유발할 수 있다. 반사기(202)를 일루미네이팅하기 위해 회전하는 이동형 피드 플레이트(208)에 대해, 반사기(202)가 프라임 포커스 반사기이면, 안테나(200)를 사용하는 시스템에서 수용가능하지 않을 수도 있는 더 많은 패턴 왜곡이 존재할 수 있다. 패턴 왜곡을 감소시키기 위해, 본 개시내용의 양상은, 피드 혼들(204 및 206)이 반사기(202)의 축으로부터 오프셋되는 오프셋 피딩된(fed) 반사기(202)를 사용할 수 있다. 이것은, 피드 혼들(204 및 206)이 반사기 어퍼처(aperture)를 막는 것을 감소시킬 수 있으며, 이는, 모든 각도들에서 고품질의 빔들을 이루기 위한 안테나(200)의 능력을 증가시킨다.
[0044]
예를 들어, 지구 중간 궤도(MEO) 위성들의 실질적으로 예측가능한 궤도들을 사용함으로써, 형상화된 안테나 반사기(202)는, 형상화된 안테나 반사기(202)의 초점 포인트(예컨대, 초점 라인, 또는 다수의 초점 포인트들)가 통신이 수행되고 있는 MEO 위성들과의 경로에 대략적으로 매칭하도록 형상화될 수 있다. 본 개시내용의 일 양상에서, 형상화된 안테나 반사기(202)는, 안테나(200)에 대해 지속적인 통신을 제공하기 위해 토러스 형상에 따라 배열된다. 일 구성에서, 형상화된 안테나 반사기(202)(예컨대, 토러스 형상)는, 피드 혼(204) 및 피드 혼(206)이 안테나(200) 위치의 가시 지평선(horizon)에 걸쳐 위성들을 추적하는 것을 허용하도록 충분한 양의 길이(214)로 설계된다.
[0045]
본 개시내용의 일 양상의 형상화된 안테나 반사기(202)는, 형상화된 안테나 반사기(202)의 원형 아크를 따라 놓인 다수의 초점 포인트들을 제공한다. 형상화된 안테나 반사기(202) 형상은 또한, 피드 혼(204) 및 피드 혼(206)이 원형 아크에서 이동하도록 설계될 수 있다. 추가로, 형상화된 안테나 반사기(202)는 오프셋될 수 있으며, 이는, 안테나 빔이 안테나(200)의 초점 포인트들의 평면을 벗어나 지향됨을 의미한다. 이것은, 피드 혼(204) 및 피드 혼(206)이 형상화된 안테나 반사기(202)의 어퍼처를 막는 것을 회피하게 하여, 개선된 이득 및 패턴 사이드 로브(side lobe) 특성들을 초래한다. 형상화된 안테나 반사기(202)가 토로이드-형상(toroid-shaped)이기 때문에, 안테나(200)의 빔 형상은 아크 상의 피드 혼(204) 및 피드 혼(206)의 위치에 관계없이 동일하게 유지될 수 있다.
[0046]
형상화된 안테나 반사기(202)의 길이(214)를 이동형 피드 플레이트(208)의 회전을 통해 피드 혼(204) 일루미네이션이 가로지르는 경우, 피드 혼(204)과 통신하는 위성은 지평선에 접근하기 시작한다. 이동형 피드 플레이트(208) 상에서 피드 혼(204) 및 피드 혼(206)을 적절하게 이격시킴으로써, 다른 위성이 안테나(200)의 관측시야에 나타나는 경우, 피드 혼(206)은, 형상화된 안테나 반사기(202)를 일루미네이팅함으로써 그 위성과 통신하는 것을 시작할 수 있다. 피드 혼(206)에 의해 제공되는 일루미네이션은 피드 혼(204)에 의해 제공되는 일루미네이션에 중첩(overlap)될 수 있지만, 형상화된 안테나 반사기(202)의 길이(214) 때문에, 피드 혼(204) 및 피드 혼(206)은 형상화된 안테나 반사기(202)의 상이한 부분들을 일루미네이팅할 수 있다.
[0047]
피드 혼(206)과 위성 사이의 통신 링크가 사용가능해지는 경우, 피드 혼(204)에 의해 지원되고 있는 통신 링크로부터, 피드 혼(206)으로부터 지금 이용가능한 통신 링크들로의 핸드오프(handoff)들이 시작될 수 있다. 결과적으로, 안테나(200)에 의해 지원되는 통신 링크들은 사실상 지속될 수 있다. 피드 혼(204)과 통신하고 있는 위성이 안테나(200)의 관측시야를 벗어나기 시작하는 경우(예컨대, 지평선에 접근하기 시작하거나, 또는 피드 혼(204)에 의해 지원되고 있는 통신 링크가 열화(degrade)되기 시작함), 피드 혼(206)은 안테나(200)에 대한 통신 링크들을 핸들링(handle)할 수 있다. 그 후, 피드 혼(206)은 형상화된 안테나 반사기(202)의 길이(214)를 일루미네이팅하고, 이동형 피드 플레이트(208)는 피드 혼(206)의 통신 링크를 유지하도록 회전된다. 이것은, 피드 혼(206)이 위성 통신들을 유지하기 위해 위성을 따르는 것(예컨대, "추적")을 허용한다.
[0048]
유사한 방식으로, 위성과 통신하고 있는 피드 혼(206)이 안테나(200)의 관측시야를 벗어나기 시작하는 경우, 피드 혼(204)이 다시 회전된다. 피드 혼(204)의 회전은, 이동형 피드 플레이트(208)를 조정함으로써 수행되어, 관측시야 내로 들어오고 있는 위성에 대한 다른 핸드오프 절차를 시작할 수 있으며, 그에 의해, 안테나(200)에 대한 지속적인 통신들이 유지된다. 이동형 피드 플레이트(208)는 이동형 피드 플레이트(208)의 중심에 걸친 축 상에서 회전될 수 있다. 각각의 피드 혼(204 및 206)은, 플레이트의 중심으로부터 동일한 반경의 고정된 위치에 있을 수 있다. 피드 혼들(204 및 206)은, 적절한 포커싱을 보장하기 위해 반사기(202)의 초점 아크와 동일한 아크 상에서 회전한다. 피드 혼들은 원형 아크 상에서 회전할 수 있다. 피드 혼들(204 및 206)은, 원형 아크와 합치(coincide)하는 이동형 피드 플레이트(208)의 중심으로부터의 반경에서 이동형 피드 플레이트(208) 상에 위치될 수 있다.
[0049]
피드 혼(204) 및 피드 혼(206)은 이동형 피드 플레이트(208) 상의 고정된 위치들에 있을 수 있거나, 또는 형상화된 안테나 반사기(202)에 관하여 일루미네이션의 각도 및 포지션에서 조정가능할 수 있다. 피드 혼(204) 및 피드 혼(206)의 조정능력은, 안테나(200)와 통신하는 위성들의 궤도 역학들에서의 약간의 차이들을 허용할 수 있다. 이러한 조정능력은 또한, 부가적인 위성 통신 시스템들에 대한 적응을 허용할 수 있다. 추가로, 이동형 피드 플레이트(208)에 더 많은 피드 혼들을 부가하는 것은, 부가적인 통신 링크들을 허용할 수 있고 그리고/또는 안테나(200)에 의해 특정되는 관측시야를 감소시킬 수 있다. 또한, 상이한 속도들로 회전할 수 있는 다수의 이동형 피드 플레이트들(208)이 존재할 수 있다. 다수의 이동형 피드 플레이트들(208)은, 상이한 위성들(108) 또는 상이한 위성 통신 시스템들과 통신하는데 사용되어 안테나(200)에 대한 부가적인 통신 링크들을 지원할 수 있다.
[0050]
피드 혼(204) 및 피드 혼(206)에 전력을 제공하고 피드 혼들(204 및 206)과 다른 전자기기들 사이의 신호 상호작용을 제공하기 위해, 이동형 피드 플레이트(208)는 충전 루프(216) 및 전력 인터페이스(218)를 포함할 수 있다. 충전 루프(216)는 고정형 플레이트(220) 상에 그리고 이동형 피드 플레이트(208) 상에 존재하는 루프이다. 충전 루프(216)는, 이동형 피드 플레이트(208) 상의 디바이스들에 전력을 공급하는 배터리들을 충전하기 위해 사용될 수 있다. 배터리들은 전력 인터페이스(218)에 로케이팅될 수 있다.
[0051]
전력 인터페이스(218)는 이동형 피드 플레이트(208) 상의 디바이스들에 직접 전력을 공급할 수 있다. 이동형 피드 플레이트(208) 상의 충전 루프(216)는 전력 공급부(230) 및 전력 인터페이스(218)로부터 전력을 수신한다. 충전 루프(216)는 또한, 충전 전력을 변조함으로써 신호들을 전달할 수 있다. 이들 신호들은, 예컨대 100 KHz 미만의 대역폭을 갖는 6.78 MHz 캐리어를 사용하는 낮은 데이터 레이트에 있을 것이다. 충전 루프(216) 및/또는 전력 인터페이스(218)를 통해 전달되는 이들 신호들은, 헬스 상태 모니터링, 자체고장진단(built-in test), 혼 정렬, 또는 제어 신호들과 같은 낮은 데이터 레이트 통신들에 대해 사용될 수 있다.
[0052]
충전 루프(216)는, 고정형 플레이트(220)로부터 피드 혼(204) 및 피드 혼(206)으로의 전력(및 가능하게는 낮은 데이터 레이트 신호들)의 무선 전달을 허용한다. 충전 루프(216)는 또한, 전자기기들(222) 또는 이동형 피드 플레이트(208) 상의 다른 디바이스들에 전력을 제공할 수 있다. 충전 루프(216)는, 유도성 코일들, 슬립 링(slip ring)들, 및/또는 다른 전력/신호 상호연결부들로 구현될 수 있다. 전력 인터페이스(218)는, 배터리들, 전력 변환기들, 또는 다른 전력 공급 컴포넌트들로 구현될 수 있다. 이동형 피드 플레이트(208)와 고정형 플레이트(220) 사이의 전력 전달의 임의의 다른 방식이 본 개시내용의 범위 내에 있는 것으로 구상된다.
[0053]
피드 혼들(204 및 206)에 의해 수신 및/또는 송신되는 전자 신호들은, 이동형 피드 플레이트(208)와 고정형 플레이트(220) 사이에서 송신하기에 더 용이한 주파수들로 변환될 수 있다. 예를 들어, 전자 신호들은 더 높은 주파수로부터 중간 주파수(IF; intermediate frequency)일 수 있는 더 낮은 주파수로 변환될 수 있거나("하향변환됨"), 또는 심지어 더 낮은 주파수("기저대역")로 변환될 수 있다. 이들 신호들은, PAN(personal area network)(예컨데, Bluetooth), WLAN(wireless local area network)(예컨대, WiFi)를 사용하는 무선 송신을 통해, 또는 피드 혼(204 및 206)에 부착되거나 또는 이동형 피드 플레이트(208) 상의 다른 전자기기들(222)의 일부일 수 있는 다른 트랜시버들을 통해 이동형 피드 플레이트(208)와 고정형 플레이트(220) 사이에서 전달될 수 있다. PAN 또는 WLAN 트랜시버들과 같은 무선 트랜시버들을 포함할 수 있는 전자기기들(222)은, 이동형 피드 플레이트(208)로부터 멀리 로케이팅된 하나 또는 그 초과의 고정형 전자기기들(228)과 무선 방식으로 통신할 수 있다. 고정형 전자기기들(228)은 고정형 플레이트(220) 또는 시스템 내의 다른 곳에 로케이팅될 수 있다. 그 후, 이들 고정형 전자기기들(228)은 고정형 플레이트(220)와 컴퓨터(224) 사이에서 신호들을 전달하거나, 다른 디바이스들에 통신 링크를 제공하기 위해 다른 베이스 유닛들에 신호들을 전달할 수 있다.
[0054]
충전 루프(216), 전력 인터페이스(218), 및/또는 전자기기들(222) 및 고정형 전자기기들(228)을 통한 이동형 피드 플레이트(208)로부터 고정형 플레이트(220)로의 신호들 및 전력의 무선 전달은, 이동형 피드 플레이트(208)와 고정형 플레이트(220) 간의 고정된 배선 연결들을 제거한다. 이것은, 이동형 피드 플레이트(208)가 단일 방향에서 너무 큰 각도(degree)들로 회전하는 것을 속박할 수 있는 엉켜(tangle)있는 배선들 또는 다른 제약적인 오브젝트들에 대한 우려없이 이동형 피드 플레이트(208)가 자유롭게 회전하는 것을 가능하게 한다. 예를 들어, 피드 혼(204) 및 피드 혼(206)에 전력을 공급하기 위해 특정한 길이의 배선이 사용되었으면, 결국, 이동형 피드 플레이트(208)의 회전은 이동형 피드 플레이트(208)의 축(212) 주변의 배선을 엉키게 할 것이다. 이것은, 이동형 피드 플레이트(208)가 엉킨 배선을 풀기 위해 "리셋"되어야 할 것이기 때문에, 안테나(200)가 위성들과의 지속적인 통신을 유지하는 것을 방해할 것이다. 추가로, 그러한 제한들은, 이동형 피드 플레이트(208)의 과-회전시에 이동형 피드 플레이트(208)와 고정형 플레이트(220) 사이의 배선들 또는 다른 신호/전력 전달 디바이스들이 고장나게 되는 경우, 안테나(200)가 동작할 수 없게 되는 것을 유발할 수 있다.
[0055]
이러한 구성에서, 고정형 플레이트(220) 및 이동형 피드 플레이트(208) 둘 모두의 축들이 정렬된다. 충전 루프(216) 및 전력 인터페이스(218)는 이동형 피드 플레이트(208)에/상에 배치되고, 유사한 구조들이 고정형 플레이트(220)에/상에 배치될 수 있다. 고정형 플레이트(220)와 이동형 피드 플레이트(208) 사이의 간격은, 충전 루프(216) 및 전력 인터페이스(218)로부터 전력이 고효율(예컨대, 90% 초과의 효율)로 전달될 수 있도록 설계되며, 그 간격은 종종 최소화된다. 고정형 플레이트(220)와 이동형 피드 플레이트(208) 사이의 전력은 정류되고, 컨디셔닝(condition)되어, 전자기기들(222), 피드 혼(204 및 206)에 전력을 공급하는데 사용되거나, 또는 배터리를 충전하거나 이동형 피드 플레이트(208) 상의 전력 인터페이스(218)에 전력을 공급하는데 사용될 수 있다.
[0056]
고정형 플레이트(220)와 이동형 피드 플레이트(208) 사이의 전력 전달은, 피드 혼(204) 및 피드 혼(206)이 반사기(202)를 일루미네이팅하게 하고, 필요한 경우 위성들과 통신하게 한다. 모터 드라이브(210)는, 필요한 경우 위성들을 추적하기 위해 이동형 피드 플레이트(208)를 이동시킨다.
[0057]
일부 위성 시스템들에서, 피드 혼(204)과 피드 혼(206) 사이의 각거리는 특정한 각도로 고정되며, 이는 80도일 수 있다. 그러나, 본 개시내용은, 피드 혼(204)과 피드 혼(206) 사이의 고정된 각거리로 제한되지 않는다. 추가로, 피드 혼(204 및 206)은, 안테나(200)에 의해 생성되는 빔 패턴의 방위각 및 고도(elevation)를 조정하기 위한 소형 조정 모터들을 가질 수 있다. 피드 혼(204) 및 피드 혼(206)을 상향 및 하향으로 이동시키거나, 또는 형상화된 안테나 반사기(202)에 더 가깝게 또는 그로부터 더 멀리 떨어지게 이동시킴으로써, 결과적인 반사된 안테나 빔 패턴은, 형상화된 안테나 반사기(202)로부터 안테나 빔이 반사됨에 따라 변한다. 피드 혼들(204 및 206)의 서로에 관한 이동은, 반사기(202)의 오프셋의 효과들, 위성들(108)의 궤도들에서의 변경들에 대응(counteract)하기 위해, 다른 위성들(108)과 통신하도록 안테나(200)를 조정하기 위해 또는 다른 이유들을 위해 이용될 수 있다.
[0058]
메모리(226)를 갖는 컴퓨터(224)가 모터 드라이브(210)에 연결될 수 있고 그리고/또는 피드 혼(204) 및 피드 혼(206), 또는 전자기기들(222), 또는 고정형 전자기기들(228)에 전기적으로 연결될 수 있다. 컴퓨터(224)는, 이동형 피드 플레이트(208)의 회전 및/또는 피드 혼(204) 및 피드 혼(206)의 이동을 제어하기 위해, 메모리(226)로부터의 명령들을 통해 또는 다른 방식들을 통해 모터 드라이브(210)를 제어할 수 있다. 메모리(226) 또는 다른 시스템을 통해, 컴퓨터(224)는 전자기기들(222) 및/또는 고정형 전자기기들(228)의 송신, 수신, 핸드오프, 또는 다른 신호 프로세싱 기능들을 제어할 수 있다. 컴퓨터(224)는 전자기기들(222 및/또는 228)로부터 데이터 신호들을 수신할 수 있다. 컴퓨터는, 고정형 전자기기들(228)로 배선됨으로써 또는 무선 방식으로 고정형 전자기기들(228)로부터 데이터 신호들을 수신할 수 있다.
[0059]
멀티-빔 토러스 반사기 안테나들에 대한 종래의 접근법들은 원형 피드 아크를 따라 고정된 위치들에 배치되는 다수의 피드 혼들을 사용할 수 있다. 이동하는 위성들을 추적하기 위해, 다수의 피드 혼들 간에 라디오 주파수(RF) 스위칭이 발생한다. 그러나, 종래의 접근법들은, 안테나 반사기 표면 상에 적절한 일루미네이션을 생성하기 위해, 피드 혼들에 대해 큰 어퍼처 사이즈들을 사용한다. 빔 위치는 원형 초점 아크 상에서의, 주어진 피드 혼(204 또는 206)의 물리적 위치에 의해 결정될 수 있다. 그러나, 각각의 피드 혼(204 또는 206)은, 피드 혼(204 또는 206)에 대한 과잉(spill over) 손실들을 감소시키는 방식으로 반사기(202)를 일루미네이팅하기 위해 유한한 폭 또는 직경의 빔을 갖는다. 피드 혼들(204 및 206)의 물리적 폭 또는 사이즈는, 피드 혼들(204 및 206)이 서로에 대해 얼마나 가까이 배치될 수 있는지를 결정한다. 따라서, 물리적 사이즈는 빔들의 각이 얼마나 가까이 이격될 수 있는지에 영향을 미친다. 일반적으로, 피드 혼들(204 및 206), 및 그들의 빔들은, 위성이 일 피드 혼(204)의 빔 피크와 다음 인접 혼(206)으로부터의 빔 피크 사이에서 이동하는 경우에 커버리지 홀(coverage hole)들을 회피하기 위해, 고정형 피드 혼 위치들과 함께 충분히 가깝게 이격될 수 없다. 이러한 관련 접근법은, 이동하는 위성들의 지속적인 추적을 위한 인접 빔들 간의 정밀한 각 간격을 달성하는 것을 어렵게 한다.
[0060]
본 개시내용은, 기어들을 갖는 소형의 비싸지 않은 모터들을 사용함으로써, 관련 기술에서의 결점들을 회피한다. 본 개시내용은, 모터 드라이브(210)에 대해 직접-구동(direct-drive) 모터들을 이용할 수 있거나 또는 요구되는 경우에는 오프-축 기어 구동형 모터(off-axis gear driven motor)들을 사용할 수 있다. 예를 들어, 모터 드라이브(210) 또는 다른 소형 모터들은, 피드 혼(204) 및 피드 혼(206)의 포지션을 조정하기 위해 피드 혼(204) 및 피드 혼(206)을 이동시키는데 사용될 수 있다. 이동형 피드 플레이트(208)의 질량 및/또는 피드 혼(204) 및 피드 혼(206)의 질량은 종래의 스캐닝 반사기 시스템들에서 훨씬 더 큰 안테나 반사기를 이동시키는 것보다 훨씬 더 소형이고 더 가볍다.
[0061]
본 개시내용의 일 양상에 따른 안테나(200)는, 방위각 배향들에서 피드 혼(204) 및 피드 혼(206)의 여러 횟수의 360도 회전들을 달성한다. 이동형 피드 플레이트(208) 상의 피드 혼들(204 및 206)의 상대적 각 포지션들에 조정들이 행해지는 경우라 하더라도, 움직임은 근본적으로 단순한 원형 움직임으로 감소된다. 본 개시내용의 이러한 양상은 또한, 위성 추적 알고리즘들의 복잡도를 감소시킬 수 있다. 추가로, 본 개시내용의 일 양상은, 저비용 소형 사이즈의 기계적 스티어링 시스템을 포함하는데, 이는 또한 경량이고 비싸지 않은 모터 드라이브를 사용한다. 다른 시스템들에서와 같은 2개의 기계적으로-스티어링된 접시 안테나들을 사용하는 것과 대조적으로, 다수의 안테나 빔들에 대한 단일 어퍼처 시스템이 또한 제공된다. 스위칭된(switched) 피드 포물면 반사기 또는 위상 어레이 접근법들에 비해 빔 왜곡 또는 이득 감소 없이 광각(wide angle) 스캔이 또한 수행될 수 있다.
[0062]
본 개시내용은, 일 양상에서, 이동형 피드 플레이트(208)가 회전함에 따라 반사기(202)로부터 고정된 거리에 배치되는 피드 혼들(204 및 206)을 이용한다. 반사기(202)의 초점 포인트들의 아크 또는 커브는, 적어도 대략적으로 반사기(202)로부터의 고정된 거리에서의 원에 매칭된다. 이러한 아크는 피드 혼들(204 및 206)의 전기적 중심들이 배치되는 곳이며, 이는 피드 혼들(204 및 206)이 반사기(202)를 적절히 일루미네이팅하게 한다. 원형 초점 커브를 따라 피드 혼들(204 및 206)을 작은 수치의 각도들로 이동시킬 수 있는 소형 모터는, 피드 혼들(204 및 206) 간의 상대 각을 변경하거나 또는 피드 혼들(204 및 206)의 포커스(즉, 전기적 중심들의 배치)를 정밀하게 튜닝하기 위한 "버니어(vernier)"로서 동작할 수 있다. 피드 혼들(204 및 206)은 또한 고도가 작은 양만큼 이동될 수 있다. 피드 혼들(204 및 206)의 고도를 이동시킴으로써, 메인 빔이 왜곡될 수 있지만, 이러한 고도의 이동은 반사기(202)의 임의의 오프셋 반사 특성들에 대응할 수 있다.
[0063]
안테나(200)는, 스위칭된 빔 반사기들 또는 액티브 위상 어레이들에 대한 20 내지 30개의 트랜시버 모듈들에 비해, 2개의 트랜시버 모듈들을 가짐으로써, 빔 포밍 또는 스티어링 라디오 주파수(RF) 전자기기들을 감소시킬 수 있다. 또한, 단순하고 정확한 스캐닝 기술은, 고속의 트레이스 백(trace back) 모드들을 구현해야 하는 것에 비해 단순한 지속적인 원형(CC; continuous circular) 패턴을 사용할 수 있다. 또한, 데이터 및 전력에 대한 무선 인터페이스의 사용은, 전선들을 회피하고 그리고 전선들이 함께 묶이거나(get tie) 감아지는(wrap up) 것을 회피한다. 또한, 이것은, 어떠한 이동하는 전기적 연결부들도 없기 때문에, 더 양호한 신뢰성을 유도한다. 일 구현에서, 형상화된 안테나 반사기(202)의 토러스 반사기는 동일한 이득을 갖는 포물면 접시의 사이즈보다 더 크거나 또는 더 작도록 사이즈가 변경될 수 있다.
[0064]
도 3은 본 개시내용의 양상이 유리하게 이용될 수 있는 예시적인 무선 통신 시스템(300)을 도시하는 도면이다. 본 개시내용의 이러한 양상에서, 안테나(200)는 궤도(304)를 따라 이동하고 있는 하나 또는 그 초과의 위성들(302)과 통신한다. 위성(302)은 다운링크(역방향 링크)(304) 및 업링크(순방향 링크)(306)를 통해 안테나(200)와 통신한다.
[0065]
안테나(200)는 또한 인터페이스(310)와 통신한다. 인터페이스(310)는, 셀룰러 텔레폰 기지국, 셀룰러 텔레폰 타워(tower), 지상통신(landline) 텔레폰 라인, 또는 임의의 다른 통신 중계기(repeater) 또는 다른 통신 시스템일 수 있다. 인터페이스(310)는 업링크(312) 및 다운링크(314)를 통해 안테나(200)와 통신한다. 인터페이스(310)는 또한, 업링크(318) 및 다운링크(320)를 통해 디바이스(316)와 통신한다. 디바이스(316)는, 모바일 폰, 핸드-헬드 개인용 통신 시스템(PCS) 유닛, 개인 휴대 정보 단말들과 같은 휴대용 데이터 유닛, GPS 인에이블된 디바이스, 내비게이션 디바이스, 셋 톱 박스, 뮤직 플레이어, 비디오 플레이어, 엔터테인먼트 유닛, 검침 장비(meter reading equipment)와 같은 고정 위치 데이터 유닛, 또는 데이터 또는 컴퓨터 명령들을 저장 또는 리트리브(retrieve)하는 다른 디바이스들, 또는 이들의 결합들일 수 있다.
[0066]
이러한 구성에서, 디바이스(316)는, 인터페이스(310) 및 안테나(200)를 통해 인터넷 또는 통신 링크들(322 및 324) 중 다른 것들에 연결될 수 있다. 디바이스(316)는 링크들(326 및 328)을 통해 안테나(200)와 직접 통신할 수 있다. 도 3에 도시된 바와 같이, 디바이스(316)는, 위성(302)에 의해 서빙(serve)되는 임의의 통신 링크(322 및/또는 324)에 연결될 수 있다. 안테나(200)가 (예컨대, 도 2에 관하여 설명된 바와 같이) 위성들(302) 중 다수의 것들을 추적할 수 있기 때문에, 안테나(200)는, 안테나(200)에서의 핸드오프 절차들을 통해 통신 링크들(322 및/또는 324)에 지속적으로 연결될 수 있다.
[0067]
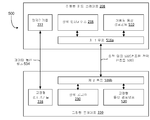
도 4는 본 개시내용의 일 양상에 따른, 반사기 앞의 초점 아크를 따라 다수의 피드 포인트들을 갖는 토러스 형상 반사기를 갖는 지상 스테이션 안테나를 사용하는 무선 통신의 방법(400)을 예시하는 흐름도이다. 블록(402)에서, 반사기 앞의 초점 아크를 따라 다수의 트랜시버 피드들을 회전시킴으로써 상승 및 하강 위성들이 동시에 추적된다. 이러한 구성에서, 트랜시버 피드들은, 초점 아크에 로케이팅되는 자신의 전기적 위상 중심들을 갖는다. 블록(404)에서, 트랜시버 피드들에는 무선으로 전력이 공급된다. 예를 들어, 도 2는, 전력 인터페이스(218) 또는 충전 루프(216)를 사용함으로써 수행될 수 있는 무선 전력공급을 예시한다. 무선 전력 전달은 15 MHz 미만의 주파수들에서 발생할 수 있다.
[0068]
다시 도 4를 참조하면, 블록(406)에서, 후속 프로세싱을 위해 트랜시버 피드들과 베이스 유닛 사이에서 신호들이 무선으로 통신된다. 예를 들어, 도 2는, 무선 통신 기술들에 의해 이동형 피드 플레이트(208)에 탑재된 전자기기들(222)로부터 고정형 전자기기들(228)을 경유하여 고정형 플레이트(220)로 신호들을 전달하는 것을 예시한다. 전력은 또한 충전 루프(216) 및 전력 인터페이스(218)를 통해 송신될 수 있다. 충전 루프(216) 및 전력 인터페이스(218)는 유도성 코일들, 슬립 링들, 및/또는 무선 연결로 구현될 수 있다.
[0069]
본 개시내용의 일 구성에서, 지상 스테이션 안테나는, 초점 아크에 따른 다수의 피드 포인트들을 통해 신호를 반사하기 위한 수단을 포함한다. 반사 수단은, 피드 혼(204) 및 피드 혼(206), 또는 반사 수단에 의해 인용되는 기능들을 수행하도록 구성되는 다른 수단일 수 있다. 이러한 구성에서, 지상 스테이션 안테나는 또한, 상승 및 하강 위성들을 동시에 추적하기 위한 수단을 포함한다. 본 개시내용의 일 양상에서, 추적 수단은, 형상화된 안테나 반사기(202), 또는 추적 수단에 의해 인용되는 기능들을 수행하도록 구성되는 다른 수단일 수 있다. 지상 스테이션 안테나는 또한, 초점 아크를 따라 추적 수단을 회전시키기 위한 수단을 포함한다. 회전 수단은, 이동형 피드 플레이트(208) 및/또는 모터 드라이브(210), 또는 회전 수단에 의해 인용되는 기능들을 수행하도록 구성되는 다른 수단일 수 있다.
[0070]
지상 스테이션 안테나는, 추적 수단에 무선으로 전력을 공급하기 위한 수단을 더 포함한다. 전력공급 수단은, 충전 루프(216) 및/또는 전력 인터페이스(218), 또는 전력공급 수단에 의해 인용되는 기능들을 수행하도록 구성되는 다른 수단일 수 있다. 지상 스테이션 안테나는 또한, 추적 수단으로부터 베이스 유닛으로 신호들을 무선으로 통신하기 위한 수단을 포함한다. 통신 수단은, 전자기기들(222), 또는 무선 통신 수단에 의해 인용되는 기능들을 수행하도록 구성되는 다른 수단일 수 있다. 다른 양상에서, 전술된 수단은, 전술된 수단에 의해 인용되는 기능들을 수행하도록 구성되는 임의의 모듈 또는 임의의 장치일 수 있다.
[0071]
도 5는 다양한 실시예들에 따른, 이동형 피드 플레이트(208)와 고정형 플레이트(220) 간의 통신 시스템(500)의 예를 예시하는 도면이다. 도 1 내지 도 5를 참조하면, 전력 인터페이스(218), 고정식 통신 컴포넌트(520), 및 제 1 루프(516a)(예컨대, 제 1 전력 전달 유닛)가 이동형 피드 플레이트(208) 상에(또는 이동형 피드 플레이트(208)에 대해 고정된 관계로) 배치될 수 있다. 전력 공급부(230a), 고정식 통신 컴포넌트(520), 및 제 2 루프(516b)(예컨대, 제 2 전력 전달 유닛)가 고정형 플레이트(220) 상에(또는 고정형 플레이트(220)에 대해 고정된 관계로) 배치될 수 있다. 충전 루프(216)는 제 1 루프(516a) 및 제 2 루프(516b)를 포함할 수 있다. 루프들(516a 및 516b)은, 설명된 방식으로 전력 및/또는 데이터를 통신하기 위해 서로 무선으로 그리고 유도성으로 커플링되도록 구성되는 유도성 루프들이다.
[0072]
다양한 실시예들에서, 제 1 루프(516a) 및 제 2 루프(516b)는 충전 링크(532)를 설정하기 위해 무선으로 그리고 유도성으로 커플링될 수 있다. 변조된 전력 신호들(530)은, 충전 링크(532)를 통해 제 1 루프(516a)(이동형 피드 플레이트(208))와 제 2 루프(516b)(고정형 플레이트(220)) 사이에서 통신(예컨대, 송신 및/또는 수신)될 수 있다. 제 1 루프(516a) 및 제 2 루프(516b)는, 변조된 전력 신호들(530)을 사용하여 충전 링크(532)를 통해 전력뿐만 아니라 데이터를 통신할 수 있다. 예를 들면, 변조된 전력 신호들(530)은 무선 충전 전력 신호들 및 데이터 신호들을 포함할 수 있다.
[0073]
몇몇 실시예들에서, 변조된 전력 신호들(530)은 무선 충전 전력 신호들 및 데이터 신호들을 둘 모두를 동시에 포함할 수 있다. 다른 실시예들에서, 변조된 전력 신호들(530)은 주어진 시간에 무선 충전 전력 신호들 또는 데이터 신호들 중 하나를 포함할 수 있다(예컨대, 무선 충전 전력 신호들 및 데이터 신호들은 개별 시간 인터벌(interval)들로 통신될 수 있음). 변조된 전력 신호들(530)은, 50 KHz, 100 KHz, 200 KHz 등과 같은(그러나 이에 제한되지 않음) 대역폭을 가질 수 있다.
[0074]
몇몇 실시예들에서, 이동형 피드 플레이트(208) 상에 제공되는 전자기기들(222) 및 고정형 플레이트(220) 상에 제공되는 고정형 전자기기들(228)은 데이터 통신 링크(534)를 통해 통신할 수 있다. 데이터 통신 링크(534)는 Bluetooth 링크, WiFi 링크, 광학 링크, 또는 다른 적절한 통신 링크들일 수 있다. 데이터 통신 링크(534)는, 전자기기들(222)과 고정형 전자기기들 간에 데이터 신호들을 통신하는데 사용될 수 있다. 데이터 신호들은, 무선 충전 전력 신호들이 아닌 임의의 신호들을 지칭할 수 있다.
[0075]
몇몇 실시예들에서, 무선 충전 전력 신호들 및 데이터 신호들을 포함하는 변조된 전력 신호들(530)을 충전 링크(532)가 지원할 수 있기 때문에, 데이터 통신 링크(534)에 대해 충전 링크(532)는, 데이터 신호들을 통신하기 위한 대안적인 링크 또는 부가적인 링크로서 사용될 수 있다. 몇몇 실시예들에서, 충전 링크(532)는 데이터 통신 링크(534)의 데이터 레이트에 비해 낮은 데이터 레이트를 가질 수 있다.
[0076]
제 1 타입의 데이터 신호들은 데이터 통신 링크(534)를 통해 통신될 수 있는 한편, 제 2 타입의 데이터 신호들은 충전 링크(532)를 통해 통신될 수 있다. 몇몇 실시예들에서, 제 1 타입의 데이터 신호들은 제 2 타입의 데이터 신호들과 상이할 수 있다. 비-제한적인 예를 예시하자면, 제 1 타입의 데이터 신호들은, 피드 혼들(204, 206)에 의해 수신된 컨텐츠 데이터 신호들 또는 송신될 컨텐츠 데이터 신호들을 포함할 수 있다. 변조된 전력 신호들(530)과 연관된 제 2 타입의 데이터 신호들은, 모터 제어 커맨드 신호들, 헬스/유지보수 정보, 전력 분배, 안테나(200)의 다양한 양상들을 모니터링하기 위한 센서 데이터 신호들(예컨대, 온도 신호들, 습도 신호들, 장애 모드들, 구조적 무결성 데이터, 환경 데이터, 이들의 결합 등), 이들의 결합 등과 같은(그러나 이에 제한되지 않음) 신호들을 포함할 수 있다. 몇몇 실시예들에서, 제 2 타입의 데이터 신호들은, 이동형 피드 플레이트(208) 및 고정형 플레이트(220)를 비롯하여 시스템(500)을 제어하기 위한 제어 신호들을 포함할 수 있다. 그러한 실시예들에서, 제 2 타입의 데이터 신호들은 컨텐츠 데이터를 포함하지 않을 수 있다. 충전 링크(532)와 데이터 통신 링크(534)를 통해 통신되는 데이터의 타입을 차별화함으로써, 개선된 데이터 경로 제어가 실현될 수 있다.
[0077]
부가적인 또는 대안적인 실시예들에서, 제 2 타입의 데이터 신호들은 또한 컨텐츠 데이터 중 일부를 포함할 수 있다. 다시 말해서, 충전 링크(532)는 데이터 스루풋을 개선하기 위해 컨텐츠 데이터에 대하여 데이터 통신 링크(534)를 오프로드할 수 있다. 비-제한적인 예를 예시하자면, 데이터 통신 링크(534)는 컨텐츠 데이터 중 일부를 통신할 수 있는 한편, 충전 링크(532)는, 데이터 통신 링크(534)를 오프로드하기 위해, 제어 신호들과 컨텐츠 데이터 중 일부를 동시에 통신할 수 있다.
[0078]
몇몇 실시예들에서, 이동형 피드 플레이트(208) 및/또는 고정형 플레이트(220) 상의 센서들(도시되지 않음)은, 시스템(500)(또는 시스템(500)의 하나 또는 그 초과의 컴포넌트들) 또는 시스템(500)의 환경과 연관된 하나 또는 그 초과의 감지된 파라미터들에 대응하는 센서 데이터를 제공할 수 있다. 센서 데이터는 충전 링크(532)를 통해 (데이터 신호들로서) 이동형 피드 플레이트(208)로부터 고정형 플레이트(220)로 통신될 수 있으며, 그 반대로 통신되는 것이 또한 가능하다. 그러한 센서 데이터는 시스템(500) 또는 시스템(500)의 컴포넌트들을 모니터링하거나 제어하는 것과 연관된 사용을 위해 컴퓨터(224)에 제공될 수 있다. 비-제한적인 예를 예시하자면, 모터 커맨드들 또는 모터 동작 데이터와 같은(그러나 이에 제한되지 않음) 제어 신호들이 이동형 피드 플레이트(208) 및 고정형 플레이트(220) 중 하나로부터 이동형 피드 플레이트(208) 및 고정형 플레이트(220) 중 다른 하나로 제공될 수 있다. 그러한 제어 신호들은, 후속하여, 예컨대 모터(210)의 동작을 제어 및/또는 모니터링하기 위해 컴퓨터(224) 또는 모터(210)에 (또는 둘 모두에) 제공될 수 있다.
[0079]
이동형 통신 컴포넌트(510)는 몇몇 실시예들에서, 제 1 루프(516a)에 직접 그리고 동작가능하게 커플링될 수 있다. 다른 실시예들에서, 이동형 통신 컴포넌트(510)는 전력 인터페이스(218)에 커플링될 수 있거나 전력 인터페이스(218)의 컴포넌트이고(또는 이동형 피드 플레이트(208) 상의 다른 컴포넌트로서 또는 그 다른 컴포넌트 내에 제공됨), 전력 인터페이스(218)를 통해 제 1 루프(516a)에 간접적으로 커플링된다. 이동형 통신 컴포넌트(510)는, 제 1 루프(516a)에 의해 수신되는 데이터를 디코딩하고 그리고/또는 제 1 루프(516a)에 의해 송신될 데이터를 인코딩하도록 구성될 수 있다. 이동형 통신 컴포넌트(510)는, 전력 인터페이스(218), 피드 혼들(204, 206), 전자기기들(222) 등(명확화를 위해 도 5에 도시되지 않음)을 비롯한(그러나 이에 제한되지 않음) 이동형 피드 플레이트(208)의 다양한 컴포넌트들로 제 1 루프(516a)로부터 수신되는 데이터를 중계하거나 이동형 피드 플레이트(208)의 다양한 컴포넌트들로부터 제 1 루프(516a)에 의해 송신될 데이터를 획득할 수 있다. 몇몇 실시예들에서, 이동형 통신 컴포넌트(510)는, 모터 제어 신호들, 모터 동작 데이터 신호들 등과 같은(그러나 이에 제한되지 않음) 제어 신호들을 통신하기 위해, 무선 또는 유선 연결을 통해 모터(210) 및/또는 컴퓨터(224)에 커플링될 수 있다.
[0080]
몇몇 실시예들에서, 고정형 통신 컴포넌트(520)는 제 2 루프(516b)에 직접 그리고 동작가능하게 커플링될 수 있다. 다른 실시예들에서, 고정형 통신 컴포넌트(520)는 전력 공급부(230)에 커플링될 수 있거나 전력 공급부(230)의 컴포넌트이고(또는 고정형 피드 플레이트(220) 상에 배치되는 다른 컴포넌트로서 또는 그 다른 컴포넌트로 내에 제공됨), 전력 공급부(230)를 통해 제 2 루프(516b)에 간접적으로 커플링된다. 고정형 통신 컴포넌트(520)는, 제 2 루프(516b)에 의해 수신되는 데이터를 디코딩하고 그리고/또는 제 2 루프(516b)에 의해 송신될 데이터를 인코딩하도록 구성될 수 있다. 고정형 통신 컴포넌트(520)는, 전력 공급부(230), 고정형 전자기기들(228) 등(명확화를 위해 도 5에 도시되지 않음)을 비롯한(그러나 이에 제한되지 않음) 고정형 플레이트(220)의 다양한 컴포넌트들로 제 2 루프(516b)로부터 수신되는 데이터를 중계하거나 고정형 플레이트(220)의 다양한 컴포넌트들로부터 제 2 루프(516b)에 의해 송신될 데이터를 획득할 수 있다. 몇몇 실시예들에서, 고정형 통신 컴포넌트(520)는, 모터 제어 신호들, 모터 동작 데이터 신호들 등과 같은(그러나 이에 제한되지 않음) 제어 신호들을 통신하기 위해, 무선 또는 유선 연결을 통해 모터(210) 및/또는 컴퓨터(224)에 커플링될 수 있다.
[0081]
몇몇 실시예들에서, 이동형 통신 컴포넌트(510) 및 고정식 통신 컴포넌트(520) 각각은, 자신 고유의 (본원 설명된 것들을 포함하는(그러나 이에 제한되지 않음) 기능들을 수행하기 위한) 프로세서 유닛, (데이터 및 컴퓨터-판독가능 명령들을 저장하기 위한) 메모리, (본원에 설명된 것들을 포함하는(그러나 이에 제한되지 않음) 하나 또는 그 초과 또는 모든 다른 컴포넌트들과 통신하기 위한) 네트워크 디바이스들 등을 포함할 수 있다. 다른 실시예들에서, 이동형 통신 컴포넌트(510) 및 고정식 통신 컴포넌트(520) 중 하나 또는 둘 모두는, 본원에 설명된 컴포넌트들 중 하나 또는 그 초과 또는 전부로부터 하드웨어 및 소프트웨어로 구현될 수 있다.
[0082]
본 개시내용의 부분들에 대한 펌웨어 및/또는 소프트웨어 구현의 경우, 방법들은 본원에 설명된 기능들을 수행하는 모듈들(예를 들어, 절차들, 함수들 등)을 이용하여 구현될 수 있다. 명령들을 유형으로 구현하는 머신-판독가능 매체가 본원에 설명된 방법들을 구현할 시에 사용될 수 있다. 예를 들어, 소프트웨어 코드들은 메모리에 저장되고 프로세서 유닛에 의해 실행될 수 있다. 메모리는 프로세서 유닛의 내부에 또는 프로세서 유닛의 외부에 구현될 수 있다. 본원에서 사용되는 바와 같이, 용어 "메모리"는, 장기, 단기, 휘발성, 비휘발성, 또는 다른 메모리의 타입들을 지칭하며, 특정한 메모리의 타입 또는 메모리들의 개수, 또는 메모리가 저장될 매체들의 타입으로 제한되는 것은 아니다.
[0083]
펌웨어 및/또는 소프트웨어로 구현되면, 기능들은 컴퓨터-판독가능 매체 상에 하나 또는 그 초과의 명령들 또는 코드로서 저장될 수 있다. 예들은, 데이터 구조로 인코딩된 컴퓨터-판독가능 매체들 및 컴퓨터 프로그램으로 인코딩된 컴퓨터-판독가능 매체들을 포함한다. 컴퓨터-판독가능 매체들은 물리적 컴퓨터 저장 매체들을 포함한다. 저장 매체는 컴퓨터에 의해 액세스될 수 있는 이용가능한 매체일 수 있다. 제한이 아닌 예로서, 그러한 컴퓨터-판독가능 매체들은 RAM, ROM, EEPROM, CD-ROM 또는 다른 광학 디스크 저장부, 자기 디스크 저장 또는 다른 자기 저장 디바이스들, 또는 명령들 또는 데이터 구조들의 형태로 원하는 프로그램 코드를 저장하는데 사용될 수 있고 컴퓨터에 의해 액세스될 수 있는 다른 매체를 포함할 수 있고; 본원에 사용된 바와 같이, 디스크(disk) 및 디스크(disc)는 CD(compact disc), 레이저 디스크(disc), 광학 디스크(disc), DVD(digital versatile disc), 플로피 디스크(disk) 및 Blu-ray 디스크(disc)를 포함하며, 여기서, 디스크(disk)들은 일반적으로 데이터를 자기적으로 재생하지만, 디스크(disc)들은 레이저들을 이용하여 광학적으로 데이터를 재생한다. 상기의 것들의 결합들이 또한 컴퓨터-판독가능 매체의 범위 내에 포함되어야 한다.
[0084]
컴퓨터 판독가능 매체 상의 저장에 부가하여, 명령들 및/또는 데이터는 통신 장치에 포함된 송신 매체들 상의 신호들로서 제공될 수 있다. 예를 들어, 통신 장치는 명령들 및 데이터를 표시하는 신호들을 갖는 트랜시버를 포함할 수 있다. 명령들 및 데이터는, 하나 또는 그 초과의 프로세서들로 하여금 청구항들에서 약술된 기능들을 구현하게 하도록 구성된다.
[0085]
본 개시내용 및 본 개시내용의 이점들이 상세히 설명되었지만, 첨부된 청구항들에 의해 정의된 바와 같은 본 개시내용의 기술을 벗어나지 않으면서 다양한 변화들, 치환들 및 수정들이 본원에서 행해질 수 있음이 이해되어야 한다. 예를 들어, "위" 및 "아래"와 같은 상관적 용어들이 기판 또는 전자 디바이스에 대하여 사용된다. 물론, 기판 또는 전자 디바이스가 뒤집히면, 위가 아래가 되고, 아래가 위가 된다. 부가적으로, 옆으로 배향되면, 위 및 아래는 기판 또는 전자 디바이스의 측면들을 지칭할 수도 있다. 또한, 본 출원의 범위는 본 명세서에서 설명된 프로세스, 머신, 제작물, 물질의 구성, 수단, 방법들 및 단계들의 특정 구성들에 제한되도록 의도되지 않는다. 당업자가 본 개시내용으로부터 용이하게 인식할 바와 같이, 본원에 설명된 대응하는 구성들과 실질적으로 동일한 기능을 수행하거나 실질적으로 동일한 결과를 달성하는, 현재 존재하거나 또는 추후에 개발될 프로세스들, 머신들, 제작물, 물질의 구성들, 수단, 방법들, 또는 단계들이 본 개시내용에 따라 이용될 수 있다. 따라서, 첨부된 청구항들은 그들의 범위 내에 그러한 프로세스들, 머신들, 제작물, 물질의 구성들, 수단, 방법들 또는 단계들을 포함하도록 의도된다.
Claims (20)
- 지상 스테이션 안테나로서,
이동형 피드 플레이트(moving feed plate);
상기 이동형 피드 플레이트 상에 배치되는 제 1 전력 전달 유닛;
고정형 플레이트(fixed plate) ― 상기 이동형 피드 플레이트는 상기 고정형 플레이트에 대하여 회전하도록 구성됨 ―; 및
상기 고정형 플레이트 상에 배치되는 제 2 전력 전달 유닛을 포함하며,
상기 제 1 전력 전달 유닛 및 상기 제 2 전력 전달 유닛은 충전 링크(charging link)를 통해 서로 간에 변조된 전력 신호들을 통신하도록 구성되고, 그리고
상기 변조된 전력 신호들은 무선 충전 전력 신호들 및 데이터 신호들을 포함하는, 지상 스테이션 안테나. - 제 1 항에 있어서,
상기 이동형 피드 플레이트 상에 배치되는 제 1 세트의 전자기기들(electronics); 및
상기 고정형 플레이트 상에 배치되는 제 2 세트의 전자기기들을 더 포함하며,
상기 제 1 세트의 전자기기들 및 상기 제 2 세트의 전자기기들은 데이터 통신 링크를 통해 서로 데이터 신호들을 통신하도록 구성되는, 지상 스테이션 안테나. - 제 2 항에 있어서,
상기 데이터 통신 링크 및 상기 충전 링크는 상이한 링크들인, 지상 스테이션 안테나. - 제 2 항에 있어서,
상기 데이터 통신 링크는 제 1 타입의 데이터 신호들을 통신하는데 사용되고, 그리고
상기 충전 링크는 제 2 타입의 데이터 신호들을 통신하는데 사용되는, 지상 스테이션 안테나. - 제 4 항에 있어서,
상기 제 1 타입의 데이터 신호들은 컨텐츠(content) 데이터를 포함하는, 지상 스테이션 안테나. - 제 4 항에 있어서,
상기 제 2 타입의 데이터 신호들은, 모터 제어 커맨드 신호들, 헬스(health)/유지보수 정보, 전력 분배, 온도 센서 신호들, 습도 센서 신호들, 장애(failure) 모드들, 구조적 무결성(integrity) 센서 데이터, 또는 환경 센서 데이터 중 적어도 하나를 포함하는, 지상 스테이션 안테나. - 제 4 항에 있어서,
상기 제 2 타입의 데이터 신호들은 컨텐츠 데이터를 포함하는, 지상 스테이션 안테나. - 제 4 항에 있어서,
상기 제 2 타입의 데이터 신호들은 상기 지상 스테이션 안테나의 컴포넌트들을 제어하는데 사용되는 데이터 신호들을 포함하는, 지상 스테이션 안테나. - 제 2 항에 있어서,
상기 충전 링크는 상기 데이터 통신 링크로부터 데이터 신호들을 오프로드(offload)하는, 지상 스테이션 안테나. - 제 2 항에 있어서,
상기 데이터 통신 링크는 Bluetooth 링크, WiFi 링크, 또는 광학 링크인, 지상 스테이션 안테나. - 제 1 항에 있어서,
상기 충전 전력 신호들, 및 상기 변조된 전력 신호들과 연관된 데이터 신호들은 동시에 통신되는, 지상 스테이션 안테나. - 제 1 항에 있어서,
상기 충전 링크의 데이터 신호들과 연관된 제 1 데이터 레이트(rate)는 상기 데이터 통신 링크의 데이터 신호들과 연관된 제 2 데이터 레이트보다 느린, 지상 스테이션 안테나. - 제 1 항에 있어서,
상기 제 1 전력 전달 유닛은 제 1 루프를 포함하고;
상기 제 2 전력 전달 유닛은 제 2 루프를 포함하고; 그리고
상기 제 1 루프 및 상기 제 2 루프 각각은, 상기 제 1 루프 및 상기 제 2 루프 중 다른 하나에 유도성으로(inductively) 커플링되는 유도성 루프인, 지상 스테이션 안테나. - 제 1 항에 있어서,
상기 이동형 피드 플레이트 상에 배치되는 이동형 통신 컴포넌트 ― 상기 이동형 통신 컴포넌트는 제 1 프로세서를 포함함 ―;
상기 고정형 플레이트 상에 배치되는 고정형 통신 컴포넌트를 더 포함하며,
상기 고정형 통신 컴포넌트는 제 2 프로세서를 포함하는, 지상 스테이션 안테나. - 제 14 항에 있어서,
상기 이동형 통신 컴포넌트는, 상기 제 1 전력 전달 유닛을 통해 상기 충전 링크를 거쳐 수신되는 데이터 신호들을 디코딩하거나 상기 제 1 전력 전달 유닛을 통해 상기 충전 링크를 거쳐 송신되는 데이터 신호들을 인코딩하도록 구성되는, 지상 스테이션 안테나. - 제 14 항에 있어서,
상기 이동형 통신 컴포넌트는 모터에 커플링되고, 그리고
상기 이동형 통신 컴포넌트는 모터 제어 신호들을 상기 모터에 통신하는, 지상 스테이션 안테나. - 제 14 항에 있어서,
상기 고정형 통신 컴포넌트는, 상기 제 2 전력 전달 유닛을 통해 상기 충전 링크를 거쳐 수신되는 데이터 신호들을 디코딩하거나 상기 제 2 전력 전달 유닛을 통해 상기 충전 링크를 거쳐 송신되는 데이터 신호들을 인코딩하도록 구성되는, 지상 스테이션 안테나. - 제 14 항에 있어서,
상기 고정형 통신 컴포넌트는 모터에 커플링되고, 그리고
상기 고정형 통신 컴포넌트는 모터 제어 신호들을 상기 모터에 통신하는, 지상 스테이션 안테나. - 지상 스테이션 안테나를 제공하기 위한 방법으로서,
이동형 피드 플레이트를 제공하는 단계;
상기 이동형 피드 플레이트 상에 배치되는 제 1 전력 전달 유닛을 제공하는 단계;
고정형 플레이트를 제공하는 단계 ― 상기 이동형 피드 플레이트는 상기 고정형 플레이트에 대하여 회전하도록 구성됨 ―; 및
상기 고정형 플레이트 상에 배치되는 제 2 전력 전달 유닛을 제공하는 단계를 포함하며,
상기 제 1 전력 전달 유닛 및 상기 제 2 전력 전달 유닛은 충전 링크를 통해 서로 간에 변조된 전력 신호들을 통신하도록 구성되고, 그리고
상기 변조된 전력 신호들은 무선 충전 전력 신호들 및 데이터 신호들을 포함하는, 지상 스테이션 안테나를 제공하기 위한 방법. - 지상 스테이션 안테나로서,
이동형 피드 플레이트를 제공하기 위한 수단;
상기 이동형 피드 플레이트 상에 배치되는 제 1 전력 전달 유닛을 제공하기 위한 수단;
고정형 플레이트를 제공하기 위한 수단 ― 상기 이동형 피드 플레이트는 상기 고정형 플레이트에 대하여 회전하도록 구성됨 ―; 및
상기 고정형 플레이트 상에 배치되는 제 2 전력 전달 유닛을 제공하기 위한 수단을 포함하며,
상기 제 1 전력 전달 유닛 및 상기 제 2 전력 전달 유닛을 제공하기 위한 수단은, 충전 링크를 통해 서로 간에 변조된 전력 신호들을 통신하도록 구성되고, 그리고
상기 변조된 전력 신호들은 무선 충전 전력 신호들 및 데이터 신호들을 포함하는, 지상 스테이션 안테나.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201562142959P | 2015-04-03 | 2015-04-03 | |
| US62/142,959 | 2015-04-03 | ||
| PCT/US2016/025933 WO2016161453A1 (en) | 2015-04-03 | 2016-04-04 | Low cost cableless ground station antenna for medium earth orbit satellite communication systems |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20170129795A true KR20170129795A (ko) | 2017-11-27 |
Family
ID=55754459
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020177027866A Withdrawn KR20170129795A (ko) | 2015-04-03 | 2016-04-04 | 지구 중간 궤도 위성 통신 시스템들을 위한 저비용 무전선 지상 스테이션 안테나 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US9991948B2 (ko) |
| EP (1) | EP3278397A1 (ko) |
| JP (1) | JP2018514137A (ko) |
| KR (1) | KR20170129795A (ko) |
| CN (1) | CN107431273A (ko) |
| WO (1) | WO2016161453A1 (ko) |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10158170B2 (en) * | 2016-01-25 | 2018-12-18 | International Business Machines Corporation | Two-dimensional scanning cylindrical reflector |
| US10177434B1 (en) * | 2016-12-23 | 2019-01-08 | X Development Llc | Parabolic reflector combined with phased array feed for long range communication |
| US10455431B2 (en) * | 2017-05-23 | 2019-10-22 | Ge Aviation Systems Llc | Line of sight aircraft data transfer system |
| US10270523B2 (en) * | 2017-06-21 | 2019-04-23 | Blue Digs LLC | Satellite terminal system with wireless link |
| US11063661B2 (en) * | 2018-06-06 | 2021-07-13 | Kymeta Corporation | Beam splitting hand off systems architecture |
| CN112086729B (zh) * | 2020-07-31 | 2023-09-29 | 深圳市贝贝特科技实业有限公司 | 自动跟踪无人机的车载天线系统 |
| CN112821072B (zh) * | 2021-01-06 | 2024-05-07 | 常熟市泓博通讯技术股份有限公司 | 转动式天线系统 |
| CN114157236B (zh) * | 2021-02-04 | 2024-06-28 | 中国科学院微小卫星创新研究院 | 太阳电池阵驱动装置测试系统 |
| JP7776132B2 (ja) * | 2022-03-30 | 2025-11-26 | 株式会社光電製作所 | レーダーシステム |
| CN115528425B (zh) * | 2022-10-12 | 2025-02-25 | 中国电子科技集团公司第五十四研究所 | 一种转轮式换馈机构 |
| CN120834410B (zh) * | 2025-08-29 | 2026-04-14 | 南通宏安金属制造有限公司 | 一种近地卫星通信天线的主承结构件 |
Family Cites Families (27)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3852763A (en) | 1970-06-08 | 1974-12-03 | Communications Satellite Corp | Torus-type antenna having a conical scan capability |
| DE2127518A1 (de) | 1970-06-08 | 1971-12-16 | Communications Satellite Corp | Antenne mit Toroid-Reflektor |
| US3993999A (en) | 1975-05-16 | 1976-11-23 | Texas Instruments Incorporated | Amplitude modulation scanning antenna system |
| JPS62154905A (ja) | 1985-12-27 | 1987-07-09 | Nec Corp | マルチビ−ムアンテナ |
| CN1078332A (zh) | 1992-04-30 | 1993-11-10 | 韩邦杰 | 一种同时接收多颗卫星信号的抛物面天线系统 |
| FR2701169B1 (fr) | 1993-02-02 | 1995-04-14 | Telediffusion Fse | Réflecteur d'antenne à diffraction pour plusieurs faisceaux de télécommunications. |
| CN2150630Y (zh) | 1993-03-15 | 1993-12-22 | 易正鸿 | 多波束、偏馈、三维、多极化卫星电视接收天线 |
| JP2885170B2 (ja) | 1996-02-23 | 1999-04-19 | 日本電気株式会社 | 反射鏡アンテナ |
| US6538612B1 (en) | 1997-03-11 | 2003-03-25 | Lael D. King | Satellite locator system |
| US5990826A (en) | 1997-10-07 | 1999-11-23 | Rockwell Science Center, Inc. | Interbuilding and urban canyon extension solution for global positioning systems |
| JP3845830B2 (ja) | 1998-09-04 | 2006-11-15 | Dxアンテナ株式会社 | マルチビームアンテナ |
| US6678520B1 (en) | 1999-01-07 | 2004-01-13 | Hughes Electronics Corporation | Method and apparatus for providing wideband services using medium and low earth orbit satellites |
| US6195037B1 (en) | 1999-06-01 | 2001-02-27 | Motorola, Inc. | Method and apparatus for increased system capacity using antenna beamforming |
| DE19945062A1 (de) | 1999-09-20 | 2001-04-12 | Daimler Chrysler Ag | Reflektor mit geformter Oberfläche und räumlich getrennten Foki zur Ausleuchtung identischer Gebiete, Antennensystem und Verfahren zur Oberflächenermittlung |
| JP3566598B2 (ja) * | 1999-09-30 | 2004-09-15 | 株式会社東芝 | アンテナ装置 |
| JP2002280801A (ja) | 2001-03-16 | 2002-09-27 | Mitsubishi Electric Corp | アンテナ装置及び導波管回転結合器 |
| JP4119352B2 (ja) | 2003-11-28 | 2008-07-16 | 株式会社東芝 | レンズアンテナ装置 |
| DE102007056329A1 (de) | 2007-11-22 | 2009-05-28 | Robert Bosch Gmbh | Winkelauflösender Radarsensor |
| US8072380B2 (en) | 2009-04-10 | 2011-12-06 | Raytheon Company | Wireless power transmission system and method |
| FR2952238B1 (fr) * | 2009-11-03 | 2012-05-04 | Thales Sa | Montage d'antenne a faisceau mobile |
| JP5727146B2 (ja) * | 2010-02-05 | 2015-06-03 | 日本無線株式会社 | レーダアンテナ装置、レーダアンテナ駆動ユニットおよび船舶レーダアンテナ用電力供給装置 |
| US8913952B2 (en) * | 2010-05-18 | 2014-12-16 | University Of South Carolina | Wireless power transfer to embedded sensors |
| US8576120B2 (en) | 2010-07-13 | 2013-11-05 | Gilat Satellite Networks Ltd. | Satellite tracking method and apparatus thereof |
| MX347898B (es) * | 2012-06-29 | 2017-05-18 | Koninklijke Philips Nv | Transferencia inalambrica de energia inductiva. |
| JP5929563B2 (ja) * | 2012-07-03 | 2016-06-08 | 三菱電機株式会社 | 無線給電システム、送電装置及び受電装置 |
| EP2747193A1 (en) * | 2012-12-19 | 2014-06-25 | BlackBerry Limited | Method and system for antenna alignment |
| US9766345B2 (en) | 2013-10-04 | 2017-09-19 | Qualcomm Incorporated | Low cost cableless ground station antenna for medium earth orbit satellite communication systems |
-
2016
- 2016-04-04 KR KR1020177027866A patent/KR20170129795A/ko not_active Withdrawn
- 2016-04-04 CN CN201680018818.3A patent/CN107431273A/zh active Pending
- 2016-04-04 WO PCT/US2016/025933 patent/WO2016161453A1/en not_active Ceased
- 2016-04-04 JP JP2017551086A patent/JP2018514137A/ja not_active Ceased
- 2016-04-04 EP EP16716782.4A patent/EP3278397A1/en not_active Withdrawn
- 2016-04-04 US US15/090,094 patent/US9991948B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| CN107431273A (zh) | 2017-12-01 |
| US20170214456A1 (en) | 2017-07-27 |
| JP2018514137A (ja) | 2018-05-31 |
| US9991948B2 (en) | 2018-06-05 |
| EP3278397A1 (en) | 2018-02-07 |
| WO2016161453A1 (en) | 2016-10-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101864208B1 (ko) | 지구 중간 궤도 위성 통신 시스템들을 위한 저비용 무전선 지상 스테이션 안테나 | |
| US9991948B2 (en) | Low cost cableless ground station antenna for medium earth orbit satellite communication systems | |
| US12586893B2 (en) | Methods and systems for mitigating interference with a nearby satellite | |
| CN108140943B (zh) | 低成本卫星用户终端天线 | |
| US7109937B2 (en) | Phased array planar antenna and a method thereof | |
| US20190280373A1 (en) | Antenna system with active array on tracking pedestal | |
| US20090295656A1 (en) | Low profile antenna for satellite communication | |
| US20160276747A1 (en) | Method and apparatus for satellite user terminal antenna pointing | |
| CN215680970U (zh) | 一种车载卫星通信天线 | |
| CN111740774B (zh) | 基于龙伯透镜天线的低轨卫星通信切换装置 | |
| KR102153441B1 (ko) | 다중대역 선택가능 피드를 구비하는 트래킹 안테나 시스템 | |
| US6229500B1 (en) | Multilayer focusing spherical lens | |
| RU2816866C1 (ru) | Абонентская земная станция подвижной спутниковой связи | |
| US20250316911A1 (en) | Multi-feed tracking antenna with stationary reflector | |
| TW202439695A (zh) | 機構式星鏈衛星接收天線 | |
| JP2004140860A (ja) | レンズアンテナ装置とその放射器位置決め制御方法 | |
| MXPA99010870A (es) | Lentes esfericos de enfoque multicapa |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0105 | International application |
Patent event date: 20170928 Patent event code: PA01051R01D Comment text: International Patent Application |
|
| PG1501 | Laying open of application | ||
| PC1203 | Withdrawal of no request for examination |