KR20170131043A - 로봇 겐트리 시스템 - Google Patents
로봇 겐트리 시스템 Download PDFInfo
- Publication number
- KR20170131043A KR20170131043A KR1020160062178A KR20160062178A KR20170131043A KR 20170131043 A KR20170131043 A KR 20170131043A KR 1020160062178 A KR1020160062178 A KR 1020160062178A KR 20160062178 A KR20160062178 A KR 20160062178A KR 20170131043 A KR20170131043 A KR 20170131043A
- Authority
- KR
- South Korea
- Prior art keywords
- guide rail
- roller
- main frame
- pinion
- rack
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images



Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/02—Program-controlled manipulators characterised by movement of the arms, e.g. cartesian coordinate type
- B25J9/023—Cartesian coordinate type
- B25J9/026—Gantry-type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J5/00—Manipulators mounted on wheels or on carriages
- B25J5/007—Manipulators mounted on wheels or on carriages mounted on wheels
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/10—Program-controlled manipulators characterised by positioning means for manipulator elements
- B25J9/102—Gears specially adapted therefor, e.g. reduction gears
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/10—Program-controlled manipulators characterised by positioning means for manipulator elements
- B25J9/12—Program-controlled manipulators characterised by positioning means for manipulator elements electric
- B25J9/123—Linear actuators
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Transmission Devices (AREA)
Abstract
Description
도 2는 종래의 겐트리 로봇의 측면도이다;
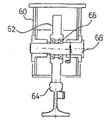
도 3은 종래의 겐트리 로봇의 단면도이다;
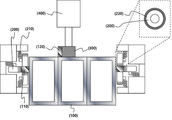
도 4는 본 발명의 실시예에 따른 로봇 겐트리 시스템의 전체 구성도이다;
도 5는 본 발명의 실시예에 따른 로봇 겐트리 시스템의 평면도이다;
도 6은 본 발명의 실시예에 따른 로봇 겐트리 시스템의 정면도이다;
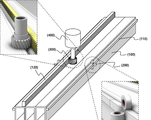
110 : 가이드 레일
120 : 랙
200 : 롤러
210 : 스프링 구동부
220 : 쿠션링
300 : 피니언
400 : 모터
Claims (8)
- 내부가 비어있는 사각 기둥형상의 메인 프레임(100);
상기 메인 프레임(100)의 양측면에 형성되고, 사각 기둥 형상의 가이드 레일(110);
상기 메인 프레임(100)의 상면에 형성되고, 일측면에 직선 기어를 형성하는 랙(120);
상기 각 가이드 레일(110)의 상면, 하면, 측면과 각각 접하여 가이드 레일(110)의 길이방향으로 회전이동하는 롤러(200);
상기 랙(120)의 기어와 맞물리는 치형을 형성하는 피니언(300);
상기 피니언(300)과 연결되고, 상기 피니언(300)에 회전구동력을 부여 하는 모터(400);를 포함하는 것을 특징으로 하는 로봇 겐트리 시스템. - 제 1 항에 있어서,
상기 피니언(300) 및 랙(120)에 형성된 치형은 사선형의 헬리컬 기어인 것을 특징으로 하는 로봇 겐트리 시스템. - 제 1 항에 있어서,
상기 롤러(200)는, 상기 가이드 레일(110)의 상면, 하면, 측면과 각각 접하는 3개의 롤러(200)가 하나의 롤러 모듈을 이루고, 각 롤러(200)가 별도의 회전축을 가지는 것을 특징으로 하는 로봇 겐트리 시스템. - 제 3 항에 있어서,
상기 롤러(200)의 회전축은, 롤러(200)가 상기 가이드 레일(110)의 접면과 밀착되도록 가이드 레일(110) 접면 방향으로 압착하는 스프링 구동부(210)를 가지는 것을 특징으로 하는 로봇 겐트리 시스템. - 제 1 항에 있어서,
상기 롤러(200)는, 상기 가이드 레일(110)과 접하는 면에 탄성력을 가진 신축소재를 적용한 쿠션링(220)을 형성하는 것을 특징으로 하는 로봇 겐트리 시스템. - 제 1 항에 있어서,
상기 가이드 레일(110)은, 상기 메인 프레임(100)의 양측면에 각각 하나 이상의 다수가 형성되고, 각 가이드 레일(110)에 상기 롤러(200)를 구비하는 것을 특징으로 하는 로봇 겐트리 시스템. - 제 1 항에 있어서,
상기 가이드 레일(110) 및 랙(120)은 각각 다수가 길이방향으로 연결된 형상을 갖는 것을 특징으로 하는 로봇 겐트리 시스템. - 제 7 항에 있어서,
상기 가이드 레일(110) 및 랙(120)의 각 연결부는 연결부가 일렬로 정렬되는 것이 아닌, 각각 순차적으로 연결부가 배열되도록 하는 것을 특징으로 하는 로봇 겐트리 시스템.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020160062178A KR101832947B1 (ko) | 2016-05-20 | 2016-05-20 | 로봇 겐트리 시스템 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020160062178A KR101832947B1 (ko) | 2016-05-20 | 2016-05-20 | 로봇 겐트리 시스템 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20170131043A true KR20170131043A (ko) | 2017-11-29 |
| KR101832947B1 KR101832947B1 (ko) | 2018-02-27 |
Family
ID=60812428
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020160062178A Active KR101832947B1 (ko) | 2016-05-20 | 2016-05-20 | 로봇 겐트리 시스템 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR101832947B1 (ko) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110000766A (zh) * | 2019-05-20 | 2019-07-12 | 品湛自动化设备制造(苏州)有限公司 | 一种重载机器人桁架 |
| CN110539295A (zh) * | 2019-09-29 | 2019-12-06 | 江苏金恒信息科技股份有限公司 | 桁架式金属试样分拣机械手 |
| US20210040724A1 (en) * | 2019-03-06 | 2021-02-11 | Icon Technology, Inc. | Systems and methods for the construction of structures |
| CN113427187A (zh) * | 2021-07-30 | 2021-09-24 | 无锡洲翔成套焊接设备有限公司 | 龙门式悬挂机器人焊接设备 |
| CN116749235A (zh) * | 2023-05-25 | 2023-09-15 | 上海普锐赛司实业有限公司 | 一种汽车零部件自动抓取机器人 |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102450093B1 (ko) | 2021-01-26 | 2022-10-04 | (주)영창로보테크 | 프로파일의 확장성이 용이한 협동로봇기반의 갠트리 로봇 시스템 |
| KR102667161B1 (ko) | 2023-11-20 | 2024-05-20 | (주) 에스피시스템스 | 백래쉬 조절부를 구비한 갠트리 로봇 |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101430908B1 (ko) * | 2014-01-21 | 2014-08-18 | 주식회사 맥스로텍 | 다관절 로봇이 탑재된 3차원 갠트리 이송시스템의 결합구조물 |
-
2016
- 2016-05-20 KR KR1020160062178A patent/KR101832947B1/ko active Active
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20210040724A1 (en) * | 2019-03-06 | 2021-02-11 | Icon Technology, Inc. | Systems and methods for the construction of structures |
| US11761195B2 (en) * | 2019-03-06 | 2023-09-19 | Icon Technology, Inc. | Systems and methods for the construction of structures |
| CN110000766A (zh) * | 2019-05-20 | 2019-07-12 | 品湛自动化设备制造(苏州)有限公司 | 一种重载机器人桁架 |
| CN110539295A (zh) * | 2019-09-29 | 2019-12-06 | 江苏金恒信息科技股份有限公司 | 桁架式金属试样分拣机械手 |
| CN110539295B (zh) * | 2019-09-29 | 2024-06-11 | 江苏金恒信息科技股份有限公司 | 桁架式金属试样分拣机械手 |
| CN113427187A (zh) * | 2021-07-30 | 2021-09-24 | 无锡洲翔成套焊接设备有限公司 | 龙门式悬挂机器人焊接设备 |
| CN116749235A (zh) * | 2023-05-25 | 2023-09-15 | 上海普锐赛司实业有限公司 | 一种汽车零部件自动抓取机器人 |
| CN116749235B (zh) * | 2023-05-25 | 2024-02-23 | 上海普锐赛司实业有限公司 | 一种汽车零部件自动抓取机器人 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR101832947B1 (ko) | 2018-02-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101832947B1 (ko) | 로봇 겐트리 시스템 | |
| CN202240209U (zh) | 弧形导轨机器人焊接工作站 | |
| CN104210832A (zh) | 一种翻转装置 | |
| CN105057944A (zh) | 一种焊接机械手立轴的升降结构 | |
| CN100522464C (zh) | 驱动机构及设有该驱动机构的可动工作台组件 | |
| CN102133696B (zh) | 罐体环缝焊接机 | |
| CN107520836B (zh) | 一种大回转平面三自由度运动平台 | |
| KR101348730B1 (ko) | 패널 반전장치 | |
| CN202910463U (zh) | 高速双驱双向交换工作台 | |
| CN207223401U (zh) | 一种新型六轴四联动钻铣机床滑台旋转机构 | |
| CN106489306A (zh) | 一种齿轮齿条式贴片头 | |
| CN108674687A (zh) | 一种龙门式柔性变位翻转装置 | |
| CN103462352A (zh) | 一种钻植平毛机 | |
| CN104084779A (zh) | 单工位操作多面的顶升旋转盘 | |
| CN216636222U (zh) | 换电装置及其行走机构 | |
| KR101311374B1 (ko) | 롤러스크류형 리니어 액튜에이터 | |
| CN204997254U (zh) | 一种焊接机械手立轴的升降结构 | |
| CN204124779U (zh) | 一种翻转装置 | |
| CN103507397A (zh) | 一种印刷机用网框升降装置 | |
| CN201151058Y (zh) | 数控龙门加工中心双驱动直联式横梁移动装置 | |
| KR20120017281A (ko) | 얼라인 스테이지 시스템 | |
| CN102152305B (zh) | 齿轮齿条式机械手 | |
| CN110900141B (zh) | 一种液压支架自动化拆装线 | |
| CN207358751U (zh) | 一种石材打磨抛光机械 | |
| CN214643609U (zh) | 一种工业机器人用移动底座 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| PA0109 | Patent application |
St.27 status event code: A-0-1-A10-A12-nap-PA0109 |
|
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| D13-X000 | Search requested |
St.27 status event code: A-1-2-D10-D13-srh-X000 |
|
| D14-X000 | Search report completed |
St.27 status event code: A-1-2-D10-D14-srh-X000 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| E13-X000 | Pre-grant limitation requested |
St.27 status event code: A-2-3-E10-E13-lim-X000 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U11-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-5-5-R10-R13-asn-PN2301 St.27 status event code: A-5-5-R10-R11-asn-PN2301 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 4 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-5-5-R10-R18-oth-X000 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 5 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 6 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 7 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 8 |
|
| R18 | Changes to party contact information recorded |
Free format text: ST27 STATUS EVENT CODE: A-5-5-R10-R18-OTH-X000 (AS PROVIDED BY THE NATIONAL OFFICE) |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-5-5-R10-R18-oth-X000 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 9 |
|
| U11 | Full renewal or maintenance fee paid |
Free format text: ST27 STATUS EVENT CODE: A-4-4-U10-U11-OTH-PR1001 (AS PROVIDED BY THE NATIONAL OFFICE) Year of fee payment: 9 |