KR20170133763A - 차량 시스템 및 차량 시스템의 내비게이션 경로 선택 방법 - Google Patents
차량 시스템 및 차량 시스템의 내비게이션 경로 선택 방법 Download PDFInfo
- Publication number
- KR20170133763A KR20170133763A KR1020160064964A KR20160064964A KR20170133763A KR 20170133763 A KR20170133763 A KR 20170133763A KR 1020160064964 A KR1020160064964 A KR 1020160064964A KR 20160064964 A KR20160064964 A KR 20160064964A KR 20170133763 A KR20170133763 A KR 20170133763A
- Authority
- KR
- South Korea
- Prior art keywords
- destination
- charging station
- charging
- path
- time required
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images




Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/3453—Special cost functions, i.e. other than distance or default speed limit of road segments
- G01C21/3469—Fuel consumption; Energy use; Emission aspects
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/3453—Special cost functions, i.e. other than distance or default speed limit of road segments
- G01C21/3476—Special cost functions, i.e. other than distance or default speed limit of road segments using point of interest [POI] information, e.g. a route passing visible POIs
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L58/00—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles
- B60L58/10—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries
- B60L58/12—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries responding to state of charge [SoC]
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/3407—Route searching; Route guidance specially adapted for specific applications
- G01C21/343—Calculating itineraries
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/36—Input/output arrangements for on-board computers
- G01C21/3626—Details of the output of route guidance instructions
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/36—Input/output arrangements for on-board computers
- G01C21/3667—Display of a road map
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/36—Input/output arrangements for on-board computers
- G01C21/3679—Retrieval, searching and output of POI information, e.g. hotels, restaurants, shops, filling stations, parking facilities
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/36—Input/output arrangements for on-board computers
- G01C21/3679—Retrieval, searching and output of POI information, e.g. hotels, restaurants, shops, filling stations, parking facilities
- G01C21/3682—Retrieval, searching and output of POI information, e.g. hotels, restaurants, shops, filling stations, parking facilities output of POI information on a road map
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/70—Energy storage systems for electromobility, e.g. batteries
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T90/00—Enabling technologies or technologies with a potential or indirect contribution to GHG emissions mitigation
- Y02T90/10—Technologies relating to charging of electric vehicles
- Y02T90/16—Information or communication technologies improving the operation of electric vehicles
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Automation & Control Theory (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Life Sciences & Earth Sciences (AREA)
- Sustainable Development (AREA)
- Sustainable Energy (AREA)
- Power Engineering (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Navigation (AREA)
Abstract
Description
도 2는 본 발명의 다양한 실시 예에 따른 충전소의 검색 조건을 나타내는 도면이다.
도 3은 본 발명의 다양한 실시 예에 따른 충전소의 검색 조건을 나타내는 도면이다.
도 4는 본 발명의 다양한 실시 예에 따라 검색된 충전소를 경유하는 경로를 나타내는 도면이다.
도 5는 본 발명의 다양한 실시 예에 따른 차량 시스템의 내비게이션 경로 선택 방법을 나타내는 흐름도이다.
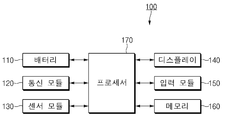
120 : 통신 모듈 130 : 센서 모듈
140 : 디스플레이 150 : 입력 모듈
160 : 메모리 170 : 프로세서
Claims (16)
- 차량 시스템에 있어서,
배터리;
입력 모듈;
상기 입력 모듈을 통해 내비게이션 목적지를 설정하는 사용자 입력을 수신하고,
현재 위치로부터 상기 목적지까지의 적어도 하나의 제1 경로를 검색하고,
현재 주행 가능 거리가 상기 목적지까지의 주행 거리보다 작으면 현재 주행 가능 거리로 도달할 수 있는 충전소를 검색하고,
상기 충전소를 경유하는 적어도 하나의 제2 경로를 검색하고,
상기 적어도 하나의 제2 경로 별로 목적지 도달에 소요되는 시간을 산출하고,
상기 목적지 도달에 소요되는 시간에 기초하여 상기 적어도 하나의 제2 경로 중 하나의 경로를 선택하도록 설정된 프로세서;를 포함하고,
상기 목적지 도달에 소요되는 시간은 주행 시간, 충전소 대기 시간 및 충전에 소요되는 시간을 포함하고, 상기 충전에 소요되는 시간은 상기 목적지까지 도달하기 위해 필요한 전력을 충전하기 위해 필요한 시간 및 상기 목적지 주변에 위치하는 충전소까지 도달하기 위해 필요한 전력을 충전하기 위한 시간을 포함하는 차량 시스템. - 제1항에 있어서,
상기 프로세서는,
상기 적어도 하나의 제2 경로 중 목적지 도달에 최소 시간이 소요되는 경로를 선택하도록 설정된 차량 시스템. - 제1항에 있어서,
디스플레이;를 더 포함하고,
상기 프로세서는,
상기 적어도 하나의 제2 경로를 상기 디스플레이에 표시하도록 설정된 차량 시스템. - 제1항에 있어서,
상기 목적지 주변에 위치하는 충전소는 상기 목적지에서 상기 현재 위치를 향하는 방향에 위치하는 충전소를 포함하는 차량 시스템. - 차량 시스템에 있어서,
배터리;
입력 모듈;
통신 모듈; 및
상기 입력 모듈을 통해 내비게이션 목적지를 설정하는 사용자 입력을 수신하고,
현재 위치로부터 상기 목적지까지의 적어도 하나의 제1 경로를 검색하고,
현재 주행 가능 거리가 상기 목적지까지의 주행 거리보다 작으면 현재 주행 가능 거리로 도달할 수 있는 충전소를 검색하고,
상기 충전소를 경유하는 적어도 하나의 제2 경로를 검색하고,
상기 적어도 하나의 제2 경로 별로 목적지 도달에 소요되는 시간을 산출하고,
상기 목적지 도달에 소요되는 시간에 기초하여 상기 적어도 하나의 제2 경로 중 하나의 경로를 선택하도록 설정된 프로세서;를 포함하고,
상기 목적지 도달에 소요되는 시간은 주행 시간, 충전소 대기 시간 및 충전에 소요되는 시간을 포함하고, 상기 프로세서는, 상기 통신 모듈을 통해 상기 충전소로부터 각각의 충전기의 사용 여부, 충전 중인 차량의 충전 완료 시간 및 충전 예약 상태 중 적어도 하나를 포함하는 충전 정보를 수신하고, 상기 충전 정보에 기초하여 상기 충전소 대기 시간을 산출하도록 설정된 차량 시스템. - 제5항에 있어서,
상기 프로세서는,
상기 적어도 하나의 제2 경로 중 목적지 도달에 최소 시간이 소요되는 경로를 선택하도록 설정된 차량 시스템. - 제5항에 있어서,
디스플레이;를 더 포함하고,
상기 프로세서는,
상기 적어도 하나의 제2 경로를 상기 디스플레이에 표시하도록 설정된 차량 시스템. - 제5항에 있어서,
상기 프로세서는,
상기 통신 모듈을 통해 상기 선택된 경로에 포함된 충전소로 충전 예약을 수행하도록 설정된 차량 시스템. - 제8항에 있어서,
상기 프로세서는,
상기 선택된 경로가 취소되면 상기 통신 모듈을 통해 상기 선택된 경로에 포함된 충전소로 상기 충전 예약의 취소를 수행하도록 설정된 차량 시스템. - 차량 시스템의 내비게이션 경로 선택 방법에 있어서,
입력 모듈을 통해 내비게이션 목적지를 설정하는 사용자 입력을 수신하는 단계;
현재 위치로부터 상기 목적지까지의 적어도 하나의 제1 경로를 검색하는 단계;
현재 주행 가능 거리가 상기 목적지까지의 주행 거리보다 작으면 현재 주행 가능 거리로 도달할 수 있는 충전소를 검색하는 단계;
상기 충전소를 경유하는 적어도 하나의 제2 경로를 검색하는 단계;
상기 적어도 하나의 제2 경로 별로 목적지 도달에 소요되는 시간을 산출하는 단계; 및
상기 목적지 도달에 소요되는 시간에 기초하여 상기 적어도 하나의 제2 경로 중 하나의 경로를 선택하는 단계;를 포함하고,
상기 목적지 도달에 소요되는 시간은 주행 시간, 충전소 대기 시간 및 충전에 소요되는 시간을 포함하고, 상기 충전에 소요되는 시간은 상기 목적지까지 도달하기 위해 필요한 전력을 충전하기 위해 필요한 시간 및 상기 목적지 주변에 위치하는 충전소까지 도달하기 위해 필요한 전력을 충전하기 위한 시간을 포함하는 방법. - 제10항에 있어서,
상기 적어도 하나의 제2 경로 중 하나의 경로를 선택하는 단계는,
상기 적어도 하나의 제2 경로 중 목적지 도달에 최소 시간이 소요되는 경로를 선택하는 단계;를 포함하는 방법. - 제10항에 있어서,
상기 적어도 하나의 제2 경로를 디스플레이에 표시하는 단계;를 더 포함하는 방법. - 제10항에 있어서,
상기 목적지 주변에 위치하는 충전소는 상기 목적지에서 상기 현재 위치를 향하는 방향에 위치하는 충전소를 포함하는 방법. - 제10항에 있어서,
상기 제2 경로 별로 목적지 도달에 소요되는 시간을 산출하는 단계는,
통신 모듈을 통해 상기 충전소로부터 각각의 충전기의 사용 여부, 충전 중인 차량의 충전 완료 시간 및 충전 예약 상태 중 적어도 하나를 포함하는 충전 정보를 수신하는 단계; 및
상기 충전 정보에 기초하여 상기 충전소 대기 시간을 산출하는 단계;를 포함하는 방법. - 제14항에 있어서,
상기 통신 모듈을 통해 상기 선택된 경로에 포함된 충전소로 충전 예약을 수행하는 단계;를 더 포함하는 방법. - 제15항에 있어서,
상기 선택된 경로가 취소되면 상기 통신 모듈을 통해 상기 선택된 경로에 포함된 충전소로 상기 충전 예약의 취소를 수행하는 단계;를 더 포함하는 방법.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020160064964A KR20170133763A (ko) | 2016-05-26 | 2016-05-26 | 차량 시스템 및 차량 시스템의 내비게이션 경로 선택 방법 |
| US15/369,587 US10107634B2 (en) | 2016-05-26 | 2016-12-05 | Vehicle system and navigation path selecting method of the same |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020160064964A KR20170133763A (ko) | 2016-05-26 | 2016-05-26 | 차량 시스템 및 차량 시스템의 내비게이션 경로 선택 방법 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020170125525A Division KR101886583B1 (ko) | 2017-09-27 | 2017-09-27 | 차량 시스템 및 차량 시스템의 내비게이션 경로 선택 방법 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20170133763A true KR20170133763A (ko) | 2017-12-06 |
Family
ID=60418713
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020160064964A Ceased KR20170133763A (ko) | 2016-05-26 | 2016-05-26 | 차량 시스템 및 차량 시스템의 내비게이션 경로 선택 방법 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US10107634B2 (ko) |
| KR (1) | KR20170133763A (ko) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109489677A (zh) * | 2018-10-17 | 2019-03-19 | 深圳壹账通智能科技有限公司 | 电动单车路线规划方法、装置、计算机设备及存储介质 |
| CN114646330A (zh) * | 2022-05-19 | 2022-06-21 | 中国测试技术研究院电子研究所 | 一种基于充电桩的路径规划方法及路径规划系统 |
| KR20230174781A (ko) * | 2022-06-21 | 2023-12-29 | 드라이브텍 주식회사 | 차량용 배터리 관리 시스템 |
| CN117993805A (zh) * | 2024-04-03 | 2024-05-07 | 厦门快先森科技有限公司 | 一种智能物流配送调度方法及系统 |
Families Citing this family (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| TWI694936B (zh) * | 2018-03-02 | 2020-06-01 | 光陽工業股份有限公司 | 充電電池的預約方法及電動載具系統 |
| JP7069861B2 (ja) * | 2018-03-12 | 2022-05-18 | トヨタ自動車株式会社 | 車両用制御装置および自動車 |
| CN110887496A (zh) * | 2018-08-15 | 2020-03-17 | 上海擎感智能科技有限公司 | 基于电能监控的充电桩导航提醒方法、系统及车载终端 |
| US11062405B2 (en) | 2019-01-31 | 2021-07-13 | Toyota Motor Engineering & Manufacturing North America, Inc. | Dynamic ordering system |
| CN109795371A (zh) * | 2019-02-19 | 2019-05-24 | 一汽-大众汽车有限公司 | 基于移动终端路线规划的电动车辆充电提醒方法及装置 |
| KR102829804B1 (ko) * | 2019-04-24 | 2025-07-03 | 현대자동차주식회사 | 차량의 주행모드별 주행가능거리 산출 방법 |
| CN110154832B (zh) * | 2019-05-30 | 2020-09-08 | 北京嘀嘀无限科技发展有限公司 | 充电提醒方法、计算机可读存储介质和电子设备 |
| EP3772429A1 (en) * | 2019-08-08 | 2021-02-10 | Ningbo Geely Automobile Research & Development Co., Ltd. | Method for controlling a low fuel or low charge warning system in a vehicle |
| CN110610333B (zh) * | 2019-08-21 | 2022-01-04 | 深圳易马达科技有限公司 | 一种规划路径的方法及终端 |
| US12403889B2 (en) * | 2020-01-09 | 2025-09-02 | Jonathan Gottehrer | Systems and methods for assigning vehicles to transportation requests |
| CN111861008B (zh) * | 2020-07-22 | 2024-09-06 | 劢微机器人科技(深圳)有限公司 | 无人车及其路径规划方法、装置、可读存储介质 |
| CN112465222B (zh) * | 2020-11-26 | 2023-07-07 | 浙江警察学院 | 一种基于充电站服务水平预测的最佳充电站选择方法 |
| EP4281313A4 (en) * | 2021-01-20 | 2024-12-18 | Enel X Way S.R.L. | SYSTEMS, METHODS AND TECHNIQUES FOR CHARGING ELECTRIC VEHICLES |
| US12179624B2 (en) * | 2021-03-23 | 2024-12-31 | Honeywell International Inc. | Systems and methods for guiding vehicles to charging points |
| CN113283623A (zh) * | 2021-05-15 | 2021-08-20 | 韦涛 | 兼容储能充电桩的电动运载工具电量路径规划方法 |
| CN113379141B (zh) * | 2021-06-23 | 2023-04-18 | 国网四川省电力公司电力科学研究院 | 一种兼顾电网负载均衡性与用户体验的电动汽车充电路径优化方法 |
| CN114003830A (zh) * | 2021-11-09 | 2022-02-01 | 氢山科技有限公司 | 基于时间的加氢站确定方法、装置和存储介质 |
| JP7753830B2 (ja) * | 2021-11-19 | 2025-10-15 | 日産自動車株式会社 | 情報処理装置及び情報処理方法 |
| KR102737095B1 (ko) * | 2021-11-29 | 2024-12-03 | 주식회사 티비유 | 추천 충전 경로를 제공하는 방법 및 이를 수행하는 충전소 정보 제공 서버, 그리고 추천 충전 경로를 제공하는 충전소 정보 제공 애플리케이션 |
| JP7726122B2 (ja) * | 2022-05-19 | 2025-08-20 | トヨタ自動車株式会社 | 航続可能距離の表示方法 |
| CN116007644A (zh) * | 2022-12-02 | 2023-04-25 | 浙江极氪智能科技有限公司 | 一种车辆行驶路线的规划方法和装置 |
| JP2024115481A (ja) * | 2023-02-14 | 2024-08-26 | 株式会社Subaru | ナビゲーション装置 |
| CN116811589B (zh) * | 2023-06-26 | 2026-01-02 | 奇瑞汽车股份有限公司 | 确定补能方式的方法、设备和存储介质 |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011237186A (ja) | 2010-05-06 | 2011-11-24 | Clarion Co Ltd | ナビゲーション装置およびその案内方法 |
| JP5621345B2 (ja) | 2010-06-21 | 2014-11-12 | 日産自動車株式会社 | ナビゲーション装置、ナビゲーションシステム及びナビゲーションシステムにおける経路算出方法 |
| JP5618297B2 (ja) | 2010-11-29 | 2014-11-05 | アルパイン株式会社 | 電気自動車用目的地設定支援機能付ナビゲーション装置 |
| KR20120116162A (ko) | 2011-04-12 | 2012-10-22 | 에스케이플래닛 주식회사 | 전기 자동차의 충전 및 방전 시간을 고려한 경로 안내 장치 및 방법 |
| CN103857985A (zh) * | 2011-08-12 | 2014-06-11 | 丰田自动车株式会社 | 充电信息提供装置 |
| JP2013167460A (ja) | 2012-02-14 | 2013-08-29 | Mitsubishi Motors Corp | 案内経路検索システム |
| JP5774534B2 (ja) * | 2012-03-30 | 2015-09-09 | 株式会社日立製作所 | 電気自動車の経路探索システム及び方法 |
| KR20140015740A (ko) | 2012-07-23 | 2014-02-07 | 에스케이플래닛 주식회사 | 전기 자동차 서비스 시스템, 그 시스템에서의 전기 자동차의 충전 서비스를 위한 장치 및 방법 |
| JP2014032041A (ja) | 2012-08-01 | 2014-02-20 | Nissan Motor Co Ltd | 充電器予約装置及び充電器予約方法 |
| WO2014033944A1 (ja) * | 2012-09-03 | 2014-03-06 | 株式会社日立製作所 | 電気自動車の充電支援システムおよび充電支援方法 |
| JP5928320B2 (ja) * | 2012-12-07 | 2016-06-01 | 株式会社日立製作所 | 電気自動車向けナビゲーションシステム |
| JP6284115B2 (ja) | 2013-06-11 | 2018-02-28 | アルパイン株式会社 | 電子装置、電子システム、経路探索方法および経路探索プログラム |
| US9580079B2 (en) * | 2013-06-19 | 2017-02-28 | Sap Se | Dynamic driving range maps for improving driving range anxiety |
| KR20150012776A (ko) | 2013-07-26 | 2015-02-04 | 현대모비스 주식회사 | 전기자동차의 주행거리 표시방법 |
| KR20150052965A (ko) | 2013-11-07 | 2015-05-15 | 현대자동차주식회사 | 전기자동차의 배터리 충전량 결정 방법 |
| CN105960573B (zh) * | 2014-02-07 | 2020-07-24 | 日产自动车株式会社 | 车辆信息提供装置 |
| US20150294329A1 (en) * | 2014-04-11 | 2015-10-15 | Nissan North America, Inc. | System and method of predicting usage of a charging station |
| US9626823B2 (en) * | 2014-04-11 | 2017-04-18 | Nissan North America, Inc. | System and method of predicting future demand of a charging station |
| JP6132982B2 (ja) * | 2014-07-09 | 2017-05-24 | 三菱電機株式会社 | 電力授受システムおよび電力授受方法 |
-
2016
- 2016-05-26 KR KR1020160064964A patent/KR20170133763A/ko not_active Ceased
- 2016-12-05 US US15/369,587 patent/US10107634B2/en active Active
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109489677A (zh) * | 2018-10-17 | 2019-03-19 | 深圳壹账通智能科技有限公司 | 电动单车路线规划方法、装置、计算机设备及存储介质 |
| CN114646330A (zh) * | 2022-05-19 | 2022-06-21 | 中国测试技术研究院电子研究所 | 一种基于充电桩的路径规划方法及路径规划系统 |
| CN114646330B (zh) * | 2022-05-19 | 2022-08-16 | 中国测试技术研究院电子研究所 | 一种基于充电桩的路径规划方法及路径规划系统 |
| KR20230174781A (ko) * | 2022-06-21 | 2023-12-29 | 드라이브텍 주식회사 | 차량용 배터리 관리 시스템 |
| US12214695B2 (en) | 2022-06-21 | 2025-02-04 | Drivetech Co., Ltd. | Vehicle battery management system |
| CN117993805A (zh) * | 2024-04-03 | 2024-05-07 | 厦门快先森科技有限公司 | 一种智能物流配送调度方法及系统 |
Also Published As
| Publication number | Publication date |
|---|---|
| US10107634B2 (en) | 2018-10-23 |
| US20170343366A1 (en) | 2017-11-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20170133763A (ko) | 차량 시스템 및 차량 시스템의 내비게이션 경로 선택 방법 | |
| KR101886583B1 (ko) | 차량 시스템 및 차량 시스템의 내비게이션 경로 선택 방법 | |
| KR101916511B1 (ko) | 차량 시스템 및 차량 시스템의 배터리 충전 방법 | |
| US11971266B2 (en) | Route guidance apparatus, route guidance method and computer program | |
| US10232855B2 (en) | Drive assist apparatus | |
| US8874358B2 (en) | Route guidance device, method, and program | |
| US8417401B2 (en) | Map display apparatus, map display method, and computer-readable tangible medium | |
| US10906424B2 (en) | System for announcing predicted remaining amount of energy | |
| US9638542B2 (en) | Method and system of route scheduling and presenting route-based fuel information | |
| JP4886099B1 (ja) | 表示制御装置、端末、表示制御システムおよび表示制御方法 | |
| CN102473351A (zh) | 信息提供系统、信息中心、车载装置和信息提供方法 | |
| JP2013104680A (ja) | 充電スタンド表示システム及び充電スタンド表示方法 | |
| JP2014240757A (ja) | 電子装置、電子システム、経路探索方法および経路探索プログラム | |
| JP2012202751A (ja) | ナビゲーション装置 | |
| JP2010122148A (ja) | 走行案内装置、走行案内方法及びコンピュータプログラム | |
| US11353330B2 (en) | Vehicle terminal and control method thereof | |
| JP5749184B2 (ja) | ナビゲーション装置 | |
| JP2019158625A (ja) | 電子装置および走行可能エリアの表示方法 | |
| JP7238528B2 (ja) | 表示装置及びコンピュータプログラム | |
| JP2012163511A (ja) | ナビゲーション装置 | |
| JP7567708B2 (ja) | サーバ | |
| JP7183909B2 (ja) | 表示装置及びコンピュータプログラム | |
| US20250042272A1 (en) | Charging system | |
| JP2014122850A (ja) | 航続可能経路演算装置及びコンピュータプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| PA0109 | Patent application |
Patent event code: PA01091R01D Comment text: Patent Application Patent event date: 20160526 |
|
| PA0201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20170407 Patent event code: PE09021S01D |
|
| AMND | Amendment | ||
| E601 | Decision to refuse application | ||
| PE0601 | Decision on rejection of patent |
Patent event date: 20170829 Comment text: Decision to Refuse Application Patent event code: PE06012S01D Patent event date: 20170407 Comment text: Notification of reason for refusal Patent event code: PE06011S01I |
|
| A107 | Divisional application of patent | ||
| AMND | Amendment | ||
| PA0107 | Divisional application |
Comment text: Divisional Application of Patent Patent event date: 20170927 Patent event code: PA01071R01D |
|
| PX0901 | Re-examination |
Patent event code: PX09011S01I Patent event date: 20170829 Comment text: Decision to Refuse Application Patent event code: PX09012R01I Patent event date: 20170607 Comment text: Amendment to Specification, etc. |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20171101 Patent event code: PE09021S01D |
|
| PG1501 | Laying open of application | ||
| PX0601 | Decision of rejection after re-examination |
Comment text: Decision to Refuse Application Patent event code: PX06014S01D Patent event date: 20180412 Comment text: Notification of reason for refusal Patent event code: PX06013S01I Patent event date: 20171101 Comment text: Amendment to Specification, etc. Patent event code: PX06012R01I Patent event date: 20170927 Comment text: Decision to Refuse Application Patent event code: PX06011S01I Patent event date: 20170829 Comment text: Amendment to Specification, etc. Patent event code: PX06012R01I Patent event date: 20170607 Comment text: Notification of reason for refusal Patent event code: PX06013S01I Patent event date: 20170407 |