KR20170135150A - 곡블록 협소구간 작업이 가능한 용접로봇 시스템의 제어방법 - Google Patents
곡블록 협소구간 작업이 가능한 용접로봇 시스템의 제어방법 Download PDFInfo
- Publication number
- KR20170135150A KR20170135150A KR1020160066607A KR20160066607A KR20170135150A KR 20170135150 A KR20170135150 A KR 20170135150A KR 1020160066607 A KR1020160066607 A KR 1020160066607A KR 20160066607 A KR20160066607 A KR 20160066607A KR 20170135150 A KR20170135150 A KR 20170135150A
- Authority
- KR
- South Korea
- Prior art keywords
- welding robot
- welding
- tilting
- robot
- linear
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23K—SOLDERING OR UNSOLDERING; WELDING; CLADDING OR PLATING BY SOLDERING OR WELDING; CUTTING BY APPLYING HEAT LOCALLY, e.g. FLAME CUTTING; WORKING BY LASER BEAM
- B23K31/00—Processes relevant to this subclass, specially adapted for particular articles or purposes, but not covered by any single one of main groups B23K1/00 - B23K28/00
- B23K31/02—Processes relevant to this subclass, specially adapted for particular articles or purposes, but not covered by any single one of main groups B23K1/00 - B23K28/00 relating to soldering or welding
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23K—SOLDERING OR UNSOLDERING; WELDING; CLADDING OR PLATING BY SOLDERING OR WELDING; CUTTING BY APPLYING HEAT LOCALLY, e.g. FLAME CUTTING; WORKING BY LASER BEAM
- B23K11/00—Resistance welding; Severing by resistance heating
- B23K11/10—Spot welding; Stitch welding
- B23K11/11—Spot welding
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23K—SOLDERING OR UNSOLDERING; WELDING; CLADDING OR PLATING BY SOLDERING OR WELDING; CUTTING BY APPLYING HEAT LOCALLY, e.g. FLAME CUTTING; WORKING BY LASER BEAM
- B23K37/00—Auxiliary devices or processes, not specially adapted for a procedure covered by only one of the other main groups of this subclass
- B23K37/02—Carriages for supporting the welding or cutting element
- B23K37/0211—Carriages for supporting the welding or cutting element travelling on a guide member, e.g. rail, track
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23K—SOLDERING OR UNSOLDERING; WELDING; CLADDING OR PLATING BY SOLDERING OR WELDING; CUTTING BY APPLYING HEAT LOCALLY, e.g. FLAME CUTTING; WORKING BY LASER BEAM
- B23K37/00—Auxiliary devices or processes, not specially adapted for a procedure covered by only one of the other main groups of this subclass
- B23K37/02—Carriages for supporting the welding or cutting element
- B23K37/0282—Carriages forming part of a welding unit
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23K—SOLDERING OR UNSOLDERING; WELDING; CLADDING OR PLATING BY SOLDERING OR WELDING; CUTTING BY APPLYING HEAT LOCALLY, e.g. FLAME CUTTING; WORKING BY LASER BEAM
- B23K9/00—Arc welding or cutting
- B23K9/007—Spot arc welding
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J11/00—Manipulators not otherwise provided for
- B25J11/005—Manipulators for mechanical processing tasks
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/02—Program-controlled manipulators characterised by movement of the arms, e.g. cartesian coordinate type
- B25J9/04—Program-controlled manipulators characterised by movement of the arms, e.g. cartesian coordinate type by rotating at least one arm, excluding the head movement itself, e.g. cylindrical coordinate type or polar coordinate type
- B25J9/041—Cylindrical coordinate type
- B25J9/042—Cylindrical coordinate type comprising an articulated arm
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- Robotics (AREA)
- Optics & Photonics (AREA)
- Plasma & Fusion (AREA)
- Manipulator (AREA)
- Numerical Control (AREA)
Abstract
Description
도 3은 본 발명에 따른 곡블록 협소구간 작업이 가능한 용접로봇 시스템의 개략 구성도,
도 4는 도 3의 분해도,
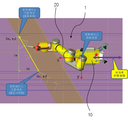
도 5 및 도 6은 본 발명에서 곡블록 협소구간 작업이 가능한 용접로봇 시스템의 작업 상태도,
도 7은 본 발명에 따른 곡블록 협소구간 작업이 가능한 용접로봇 시스템의 제어방법을 보인 흐름도.



10: 로봇 베이스
20: 로봇팔
30: 틸팅 수단
31: 틸팅부
40: 직선 부가 축
41: 프레임
42: 이동 부재
Claims (12)
- 곡블록 협소 구간 작업이 가능한 용접로봇 시스템으로서,
로봇 베이스와 다관절 로봇팔 및 토치를 포함하고, 자유도를 이용하여 곡블록 용접을 수행하는 용접로봇; 및
상기 용접로봇의 베이스와 결합하며, 상기 용접로봇의 직선 자유도를 부가하여 작업 영역을 확장하는 직선 부가 축을 포함하는 것을 특징으로 하는 곡블록 협소 구간 작업이 가능한 용접로봇 시스템.
- 청구항 1에서, 상기 직선 부가 축은 상기 용접로봇과 병진운동으로 동시 동작하는 것을 특징으로 하는 곡블록 협소 구간 작업이 가능한 용접로봇 시스템.
- 청구항 1 또는 청구항 2에서, 상기 직선 부가 축은 상기 용접로봇을 직선 방향으로 전진 또는 후진시키는 이동 부재를 포함하는 것을 특징으로 하는 곡블록 협소 구간 작업이 가능한 용접로봇 시스템.
- 곡블록 협소 구간 작업이 가능한 용접로봇 시스템으로서,
로봇 베이스와 다관절 로봇팔 및 토치를 포함하고, 자유도를 이용하여 곡블록 용접을 수행하는 용접로봇;
상기 용접로봇의 베이스와 결합하며, 곡블록 기울기에 따라 상기 용접로봇을 틸팅시키는 틸팅수단; 및
상기 틸팅수단과 결합하며, 상기 용접로봇에 직선 자유도를 부가하여 작업 영역을 확장하는 직선 부가 축을 포함하는 것을 특징으로 하는 곡블록 협소 구간 작업이 가능한 용접로봇 시스템.
- 청구항 4에서, 상기 틸팅수단은 상기 용접로봇의 팅팅 각도를 조절하는 틸팅부를 포함하는 것을 특징으로 하는 곡블록 협소 구간 작업이 가능한 용접로봇 시스템.
- 청구항 4에서, 상기 직선 부가 축은 상기 용접로봇과 병진운동으로 동시 동작하는 것을 특징으로 하는 곡블록 협소 구간 작업이 가능한 용접로봇 시스템.
- 청구항 6에서, 상기 직선 부가 축은 상기 틸팅 수단과 틸팅 수단에 장착된 용접로봇을 직선 방향으로 전진 또는 후진시키는 이동 부재를 포함하는 것을 특징으로 하는 곡블록 협소 구간 작업이 가능한 용접로봇 시스템.
- 곡블록 협소 구간 작업이 가능한 용접로봇 시스템의 제어방법으로서,
(a) 작업대상물에 용접로봇을 위치시키는 단계;
(b) 틸팅수단으로 상기 용접로봇의 각도를 설정하는 단계;
(c) 작업 시작 명령이 입력되면, 목표점 위치좌표를 획득하는 단계;
(d) 현재 위치를 계산하는 단계;
(e) 상기 목표 점과 현재 위치와의 거리를 계산하는 단계;
(f) 상기 (e)단계에서 계산한 거리값을 용접로봇 보간과 직선 구간 보간 영역으로 분할하는 단계;
(g) 상기 (f)단계에서 분할한 보간 영역별로 축 이동 값을 보간하는 단계; 및
(h) 상기 (g)단계에서 보간한 축 이동 값을 기초로 용접로봇 및 직선 부가 축을 동작시켜 목표 점으로 이동하는 단계를 포함하는 것을 특징으로 하는 곡블록 협소 구간 작업이 가능한 용접로봇 시스템의 제어방법.
- 청구항 8에서, 상기 (d)단계는 툴 끝점의 위치를 현재 위치로 계산하는 것을 특징으로 하는 곡블록 협소 구간 작업이 가능한 용접로봇 시스템의 제어방법.
- 청구항 8에서, 상기 (e)단계는 하기의 수식을 이용하여 목표점과 현재 위치와의 거리(ΔP)를 계산하는 것을 특징으로 하는 곡블록 협소 구간 작업이 가능한 용접로봇 시스템의 제어방법.

여기서 P2는 목표점 좌표, P1은 현재 위치 좌표, α는 기울기를 나타낸다.
- 청구항 8에서, 상기 (g)단계는 (g1) 로봇 6축을 보간하는 단계; (g2) 직선 부가 축을 보간하는 단계를 포함하는 것을 특징으로 하는 곡블록 협소 구간 작업이 가능한 용접로봇 시스템의 제어방법.
- 청구항 8에서, 상기 (h)단계는 용접로봇 및 직선 부가 축을 동기화하여 병진운동으로 동시 동작시키는 것을 특징으로 하는 곡블록 협소 구간 작업이 가능한 용접로봇 시스템의 제어방법.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020160066607A KR101808295B1 (ko) | 2016-05-30 | 2016-05-30 | 곡블록 협소구간 작업이 가능한 용접로봇 시스템의 제어방법 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020160066607A KR101808295B1 (ko) | 2016-05-30 | 2016-05-30 | 곡블록 협소구간 작업이 가능한 용접로봇 시스템의 제어방법 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20170135150A true KR20170135150A (ko) | 2017-12-08 |
| KR101808295B1 KR101808295B1 (ko) | 2017-12-12 |
Family
ID=60919646
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020160066607A Active KR101808295B1 (ko) | 2016-05-30 | 2016-05-30 | 곡블록 협소구간 작업이 가능한 용접로봇 시스템의 제어방법 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR101808295B1 (ko) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111151927A (zh) * | 2020-01-14 | 2020-05-15 | 深圳市威博特科技有限公司 | 自动焊接系统 |
| CN111979957A (zh) * | 2020-09-01 | 2020-11-24 | 广东新江永安建设工程有限公司 | 一种市政施工用公路隔离板的自动铺设装置 |
| KR20210004527A (ko) * | 2019-07-05 | 2021-01-13 | 대우조선해양 주식회사 | 조선 곡블록 용접로봇 장치 |
| CN112720433A (zh) * | 2021-01-21 | 2021-04-30 | 广州明瑶科技有限公司 | 一种具有定位功能的焊接机器人 |
| CN118252622A (zh) * | 2023-04-12 | 2024-06-28 | 上海馥逸医疗科技有限公司 | 手术机器人及其机械臂 |
| CN119426876A (zh) * | 2025-01-07 | 2025-02-14 | 浙江钱江机器人有限公司 | 一种多自由度焊接机械臂 |
| CN121132075A (zh) * | 2025-09-29 | 2025-12-16 | 中国石油大学(华东) | 一种仿生章鱼海底管道焊接机器人 |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102223886B1 (ko) | 2019-07-04 | 2021-03-05 | 주식회사 신독 | 다관절 로봇 작업 반경 확장용 틸팅장치 |
| KR102201397B1 (ko) | 2020-11-02 | 2021-01-11 | 주식회사 태영금속 | 용접 시스템 |
| KR102762299B1 (ko) | 2024-01-31 | 2025-02-04 | 강현섭 | 로봇셀 |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR100535627B1 (ko) | 2003-08-08 | 2005-12-08 | 한국원자력연구소 | 원자로 내부 검사장치 |
| KR101118225B1 (ko) | 2009-08-12 | 2012-03-19 | 대우조선해양 주식회사 | 선체 조립용 용접 로봇 |
-
2016
- 2016-05-30 KR KR1020160066607A patent/KR101808295B1/ko active Active
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20210004527A (ko) * | 2019-07-05 | 2021-01-13 | 대우조선해양 주식회사 | 조선 곡블록 용접로봇 장치 |
| CN111151927A (zh) * | 2020-01-14 | 2020-05-15 | 深圳市威博特科技有限公司 | 自动焊接系统 |
| CN111979957A (zh) * | 2020-09-01 | 2020-11-24 | 广东新江永安建设工程有限公司 | 一种市政施工用公路隔离板的自动铺设装置 |
| CN112720433A (zh) * | 2021-01-21 | 2021-04-30 | 广州明瑶科技有限公司 | 一种具有定位功能的焊接机器人 |
| CN118252622A (zh) * | 2023-04-12 | 2024-06-28 | 上海馥逸医疗科技有限公司 | 手术机器人及其机械臂 |
| CN119426876A (zh) * | 2025-01-07 | 2025-02-14 | 浙江钱江机器人有限公司 | 一种多自由度焊接机械臂 |
| CN121132075A (zh) * | 2025-09-29 | 2025-12-16 | 中国石油大学(华东) | 一种仿生章鱼海底管道焊接机器人 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR101808295B1 (ko) | 2017-12-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101808295B1 (ko) | 곡블록 협소구간 작업이 가능한 용접로봇 시스템의 제어방법 | |
| KR102013459B1 (ko) | 로봇 제어 방법 | |
| JP5980867B2 (ja) | ロボットをオフラインで教示するロボット教示装置 | |
| CN107378324B (zh) | 一种基于视觉提取的异型工件的焊接系统及方法 | |
| US10265860B2 (en) | Method and apparatus for controlling operations of robot | |
| JP2010201592A (ja) | ロボットの動作経路生成方法 | |
| US6283361B1 (en) | General-purpose jig | |
| US20040054437A1 (en) | Robot control apparatus | |
| US10022868B2 (en) | Inverse kinematic solution for multi-joint link mechanism, and teaching-data creating device using the inverse kinematic solution | |
| JP2020082285A (ja) | 複数のロボットの干渉確認方法、ロボットシステム | |
| JP2000176867A (ja) | ロボット | |
| WO2014123054A1 (ja) | ロボット制御装置及びロボット制御方法 | |
| CN112297003B (zh) | 设定机器人坐标系的装置、机器人控制装置、机器人系统以及方法 | |
| JP5056241B2 (ja) | ロボットシステム制御装置 | |
| US20130085606A1 (en) | Robot control device and control method | |
| JP2020069620A (ja) | 溶接装置及び溶接方法 | |
| JP2011131326A (ja) | ロボットアームの干渉回避方法 | |
| JP2019166578A (ja) | ロボットの動作プログラムの設定装置、ロボット、およびロボットの制御方法 | |
| JP2019094665A (ja) | 穿孔支援装置 | |
| CN115305980B (zh) | 用于控制折叠臂式臂架的方法、处理器、装置及工程设备 | |
| KR102643024B1 (ko) | 레이저 가공방법 | |
| JP2009050949A (ja) | ロボットアームの軌道教示方法および軌道教示装置 | |
| JP4825614B2 (ja) | 多関節リンク機構の軌跡制御装置 | |
| CN115328216B (zh) | 用于控制直臂式臂架的方法、处理器、装置及工程设备 | |
| JPH08323665A (ja) | ロボットの教示制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
St.27 status event code: A-0-1-A10-A12-nap-PA0109 |
|
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-3-3-R10-R18-oth-X000 |
|
| D13-X000 | Search requested |
St.27 status event code: A-1-2-D10-D13-srh-X000 |
|
| D14-X000 | Search report completed |
St.27 status event code: A-1-2-D10-D14-srh-X000 |
|
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| E13-X000 | Pre-grant limitation requested |
St.27 status event code: A-2-3-E10-E13-lim-X000 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U11-oth-PR1002 Fee payment year number: 1 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 4 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 5 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-5-5-R10-R18-oth-X000 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 6 |
|
| PN2301 | Change of applicant |
St.27 status event code: A-5-5-R10-R13-asn-PN2301 St.27 status event code: A-5-5-R10-R11-asn-PN2301 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 7 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 8 |
|
| P14-X000 | Amendment of ip right document requested |
St.27 status event code: A-5-5-P10-P14-nap-X000 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 9 |
|
| U11 | Full renewal or maintenance fee paid |
Free format text: ST27 STATUS EVENT CODE: A-4-4-U10-U11-OTH-PR1001 (AS PROVIDED BY THE NATIONAL OFFICE) Year of fee payment: 9 |