KR20170139608A - 고장 진단 장치 및 고장 진단 방법 - Google Patents
고장 진단 장치 및 고장 진단 방법 Download PDFInfo
- Publication number
- KR20170139608A KR20170139608A KR1020177033616A KR20177033616A KR20170139608A KR 20170139608 A KR20170139608 A KR 20170139608A KR 1020177033616 A KR1020177033616 A KR 1020177033616A KR 20177033616 A KR20177033616 A KR 20177033616A KR 20170139608 A KR20170139608 A KR 20170139608A
- Authority
- KR
- South Korea
- Prior art keywords
- disturbance torque
- maintenance
- value
- failure
- torque value
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/08—Controls for manipulators by means of sensing devices, e.g. viewing or touching devices
- B25J13/085—Force or torque sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/0095—Means or methods for testing manipulators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/06—Safety devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/10—Program-controlled manipulators characterised by positioning means for manipulator elements
- B25J9/12—Program-controlled manipulators characterised by positioning means for manipulator elements electric
- B25J9/126—Rotary actuators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1674—Program controls characterised by safety, monitoring, diagnostic
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L5/00—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes
- G01L5/0061—Force sensors associated with industrial machines or actuators
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B19/00—Program-control systems
- G05B19/02—Program-control systems electric
- G05B19/18—Numerical control [NC], i.e. automatically operating machines, in particular machine tools, e.g. in a manufacturing environment, so as to execute positioning, movement or co-ordinated operations by means of program data in numerical form
- G05B19/402—Numerical control [NC], i.e. automatically operating machines, in particular machine tools, e.g. in a manufacturing environment, so as to execute positioning, movement or co-ordinated operations by means of program data in numerical form characterised by control arrangements for positioning, e.g. centring a tool relative to a hole in the workpiece, additional detection means to correct position
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B19/00—Program-control systems
- G05B19/02—Program-control systems electric
- G05B19/18—Numerical control [NC], i.e. automatically operating machines, in particular machine tools, e.g. in a manufacturing environment, so as to execute positioning, movement or co-ordinated operations by means of program data in numerical form
- G05B19/406—Numerical control [NC], i.e. automatically operating machines, in particular machine tools, e.g. in a manufacturing environment, so as to execute positioning, movement or co-ordinated operations by means of program data in numerical form characterised by monitoring or safety
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B19/00—Program-control systems
- G05B19/02—Program-control systems electric
- G05B19/18—Numerical control [NC], i.e. automatically operating machines, in particular machine tools, e.g. in a manufacturing environment, so as to execute positioning, movement or co-ordinated operations by means of program data in numerical form
- G05B19/416—Numerical control [NC], i.e. automatically operating machines, in particular machine tools, e.g. in a manufacturing environment, so as to execute positioning, movement or co-ordinated operations by means of program data in numerical form characterised by control of velocity, acceleration or deceleration
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/34—Director, elements to supervisory
- G05B2219/34013—Servocontroller
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/37—Measurements
- G05B2219/37624—Detect collision, blocking by measuring change of velocity or torque
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/39—Robotics, robotics to robotics hand
- G05B2219/39355—Observer, disturbance observer
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- Human Computer Interaction (AREA)
- General Physics & Mathematics (AREA)
- Manufacturing & Machinery (AREA)
- Automation & Control Theory (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Manipulator (AREA)
- Testing And Monitoring For Control Systems (AREA)
- Control Of Electric Motors In General (AREA)
- Numerical Control (AREA)
Abstract
Description
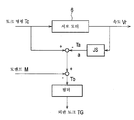
도 2는, 외란 토크를 구하는 수순을 설명하기 위한 블록도이다.
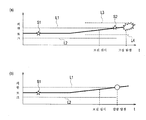
도 3은, 보전이 실시되기 전후의 외란 토크값의 변동을 설명하기 위한 도면이다.
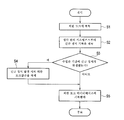
도 4는, 본 발명의 일 실시 형태에 따른 고장 진단 장치에 의한 외란 토크 선정 처리의 수순을 나타내는 흐름도이다.
도 5는, 본 발명의 일 실시 형태에 따른 고장 진단 장치에 의한 고장 진단 처리의 수순을 나타내는 흐름도이다.
도 6은, 본 발명의 일 실시 형태에 따른 고장 진단 장치에 의한 효과를 설명하기 위한 도면이다.
도 7은, 본 발명의 일 실시 형태에 따른 고장 진단 장치에 의한 효과를 설명하기 위한 도면이다.
2: 로봇 제어 장치
3: 고장 진단 장치
4: 생산 관리 장치
5: 로봇 아암
6: 서보 모터(모터)
7: 펄스 코더
8: 감속기
9: 동작 통괄 제어부
10, 15, 20: 통신부
11: 서보 제어부
12: 외란 토크 연산부
13: 상태 데이터 취득부
14: 서보 앰프부
16: 외란 토크 선정부
17: 외란 토크 데이터베이스
18: 고장 진단부
19: 보전 실적 데이터베이스
21: 생산 정보 데이터베이스
25: 보전 영향 판단부
100: 고장 진단 시스템
Claims (6)
- 동작축의 구동원으로서 모터를 구비한 기계 장치에 대해서, 소정 주기마다 상기 동작축의 이동 위치와 상기 동작축에 걸리는 외란 토크값을 취득하고, 상기 외란 토크값이 고장 판정 역치보다 큰 경우에 고장이라고 진단하는 고장 진단 장치에 있어서,
상기 동작축에 대하여 보전이 실시된 경우에, 상기 보전이 실시되기 전후의 상기 외란 토크값의 변화를 산출하는 보전 영향 판단부와,
상기 외란 토크값의 변화가 소정의 역치보다 큰 경우에만 상기 고장 판정 역치를 재설정하는 고장 진단부
를 구비하는 것을 특징으로 하는 고장 진단 장치. - 제1항에 있어서, 상기 보전 영향 판단부는, 상기 외란 토크값의 변화로서, 상기 외란 토크값의 변화율을 산출하는 것을 특징으로 하는 고장 진단 장치.
- 제1항 또는 제2항에 있어서, 상기 보전 영향 판단부는, 상기 보전이 실시된 기계 장치의 동작축 중 상기 보전이 실시되지 않은 동작축에 대하여, 상기 보전이 실시되기 전후의 상기 외란 토크값의 변화를 산출하는 것을 특징으로 하는 고장 진단 장치.
- 제1항 내지 제3항 중 어느 한 항에 있어서, 상기 보전 영향 판단부는, 상기 보전을 실시하기 전의 외란 토크값과 상기 보전의 실시일부터 소정 기간 경과한 이후의 외란 토크값을 사용하여, 상기 외란 토크값의 변화를 산출하는 것을 특징으로 하는 고장 진단 장치.
- 제1항 내지 제4항 중 어느 한 항에 있어서, 상기 고장 진단부는, 상기 보전이 실시된 후의 외란 토크값의 평균값, 분산값 또는 중앙값 중 적어도 하나를 사용하여, 상기 고장 판정 역치를 재설정하는 것을 특징으로 하는 고장 진단 장치.
- 동작축의 구동원으로서 모터를 구비한 기계 장치에 대해서, 소정 주기마다 상기 동작축의 이동 위치와 상기 동작축에 걸리는 외란 토크값을 취득하고, 상기 외란 토크값이 고장 판정 역치보다 큰 경우에 고장이라고 진단하는 고장 진단 장치에 의한 고장 진단 방법에 있어서,
상기 고장 진단 장치는,
상기 동작축에 대하여 보전이 실시된 경우에, 상기 보전이 실시되기 전후의 상기 외란 토크값의 변화를 산출하고,
상기 외란 토크값의 변화가 소정의 역치보다 큰 경우에만 상기 고장 판정 역치를 재설정하는 것을 특징으로 하는 고장 진단 방법.
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2015/064849 WO2016189608A1 (ja) | 2015-05-25 | 2015-05-25 | 故障診断装置及び故障診断方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20170139608A true KR20170139608A (ko) | 2017-12-19 |
| KR101889248B1 KR101889248B1 (ko) | 2018-08-16 |
Family
ID=57392982
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020177033616A Active KR101889248B1 (ko) | 2015-05-25 | 2015-05-25 | 고장 진단 장치 및 고장 진단 방법 |
Country Status (11)
| Country | Link |
|---|---|
| US (1) | US10112305B2 (ko) |
| EP (1) | EP3305482B1 (ko) |
| JP (1) | JP6428933B2 (ko) |
| KR (1) | KR101889248B1 (ko) |
| CN (1) | CN107614216B (ko) |
| BR (1) | BR112017025292B1 (ko) |
| CA (1) | CA2986736C (ko) |
| ES (1) | ES2763004T3 (ko) |
| MX (1) | MX365231B (ko) |
| RU (1) | RU2678857C1 (ko) |
| WO (1) | WO2016189608A1 (ko) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102054771B1 (ko) * | 2018-06-15 | 2019-12-11 | 두림야스카와(주) | 로봇의 토크 부하율을 이용한 고장 예측방법 |
Families Citing this family (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6496338B2 (ja) | 2017-03-14 | 2019-04-03 | ファナック株式会社 | 工作機械の制御システム |
| JP6474450B2 (ja) | 2017-04-17 | 2019-02-27 | ファナック株式会社 | 工作機械の制御システム |
| JP6514264B2 (ja) * | 2017-04-20 | 2019-05-15 | ファナック株式会社 | 工作機械の制御システム |
| EP3733361B1 (en) * | 2017-12-26 | 2023-08-23 | Nissan Motor Co., Ltd. | Malfunction determination method and malfunction determination device |
| CN108152740A (zh) * | 2018-01-02 | 2018-06-12 | 重庆长安汽车股份有限公司 | 驱动电机系统故障诊断的方法、装置及设备及电动汽车 |
| US11931904B2 (en) * | 2018-05-01 | 2024-03-19 | Nissan Motor Co., Ltd. | Abnormality determination apparatus, abnormality determination system, and abnormality determination method |
| EP3804923A4 (en) * | 2018-06-04 | 2021-07-14 | Nissan Motor Co., Ltd. | DEVICE FOR DETERMINING ANOMALY AND METHOD FOR DETERMINING ANOMALY |
| JP7056418B2 (ja) * | 2018-07-05 | 2022-04-19 | 日産自動車株式会社 | 異常判定装置及び異常判定方法 |
| WO2020031225A1 (ja) * | 2018-08-06 | 2020-02-13 | 日産自動車株式会社 | 異常診断装置及び異常診断方法 |
| JP7116930B2 (ja) * | 2019-01-31 | 2022-08-12 | 株式会社安川電機 | モータ制御システム、エンコーダ、サーボモータ |
| JP7343323B2 (ja) * | 2019-07-25 | 2023-09-12 | ファナック株式会社 | 故障予測システム |
| DE112021003252T5 (de) * | 2020-06-16 | 2023-04-06 | Fanuc Corporation | Roboter-Steuervorrichtung |
| CN112834225A (zh) * | 2021-01-05 | 2021-05-25 | 吉孚动力技术(中国)有限公司 | 一种混合动力系统驱动电机扭矩故障的测试及响应方法 |
| JP7772797B2 (ja) * | 2021-07-28 | 2025-11-18 | ファナック株式会社 | ロボットシステム |
| CN114237199B (zh) * | 2021-11-29 | 2023-10-24 | 中国航发沈阳发动机研究所 | 基于自适应比较器的航空发动机执行回路故障检测方法 |
| CN115674272B (zh) * | 2022-11-03 | 2026-01-06 | 中国科学技术大学先进技术研究院 | 机器人故障诊断方法、装置、设备以及存储介质 |
| CN119439970B (zh) * | 2025-01-08 | 2025-07-11 | 浙江国利信安科技有限公司 | 用于工控系统故障诊断的方法、计算设备和存储介质 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09174482A (ja) | 1995-12-25 | 1997-07-08 | Fanuc Ltd | ロボットの故障診断方法 |
| JP2002175104A (ja) * | 2000-12-05 | 2002-06-21 | Murata Mach Ltd | 異常負荷監視機能付き工作機械 |
| JP2009226488A (ja) * | 2008-03-19 | 2009-10-08 | Kanto Auto Works Ltd | ロボット内蔵減速機の故障診断方法及び装置 |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| SU1536357A1 (ru) * | 1988-02-29 | 1990-01-15 | Горьковский Политехнический Институт | Устройство дл диагностики неисправностей технических объектов |
| JPH0751998A (ja) | 1993-08-09 | 1995-02-28 | Fanuc Ltd | 工具の寿命推定方法 |
| JPH07132440A (ja) | 1993-11-02 | 1995-05-23 | Fanuc Ltd | 加工負荷監視方式 |
| JP3080617B1 (ja) | 1999-07-19 | 2000-08-28 | ファナック株式会社 | 射出成形機の金型保護装置 |
| JP3870052B2 (ja) * | 2001-09-20 | 2007-01-17 | 株式会社日立製作所 | 半導体装置の製造方法及び欠陥検査データ処理方法 |
| DE602005010539D1 (de) * | 2004-12-28 | 2008-12-04 | Fanuc Ltd | Bestimmung eines Schwellwertes für ein Gerät zur Schadenserkennung auf einem Werkzeug |
| JP4515939B2 (ja) * | 2005-03-07 | 2010-08-04 | 株式会社東芝 | プラント監視方法 |
| JP2008183680A (ja) | 2007-01-31 | 2008-08-14 | Yaskawa Electric Corp | 負荷機械の制御装置とその衝突検出しきい値更新方法 |
| JP5381968B2 (ja) * | 2010-12-21 | 2014-01-08 | 株式会社デンソー | トルクセンサ、トルク検出装置、および、これを用いた電動パワーステアリング装置。 |
| JP2013086930A (ja) * | 2011-10-19 | 2013-05-13 | Mitsubishi Electric Corp | ブレーキ診断装置 |
| JP5961566B2 (ja) * | 2012-03-13 | 2016-08-02 | Kyb株式会社 | トルクセンサの異常診断装置及び異常診断方法 |
| KR101376831B1 (ko) * | 2012-03-27 | 2014-03-20 | 삼성전기주식회사 | 표면결함 검사방법 |
| MX364634B (es) * | 2015-05-22 | 2019-05-03 | Nissan Motor | Dispositivo de diagnóstico de falla y método de diagnóstico de falla. |
| EP3305483B1 (en) * | 2015-05-29 | 2020-12-30 | Nissan Motor Co., Ltd. | Fault diagnosis device and fault diagnosis method |
-
2015
- 2015-05-25 ES ES15893244T patent/ES2763004T3/es active Active
- 2015-05-25 BR BR112017025292-9A patent/BR112017025292B1/pt not_active IP Right Cessation
- 2015-05-25 JP JP2017520084A patent/JP6428933B2/ja active Active
- 2015-05-25 EP EP15893244.2A patent/EP3305482B1/en active Active
- 2015-05-25 MX MX2017014937A patent/MX365231B/es active IP Right Grant
- 2015-05-25 KR KR1020177033616A patent/KR101889248B1/ko active Active
- 2015-05-25 WO PCT/JP2015/064849 patent/WO2016189608A1/ja not_active Ceased
- 2015-05-25 CN CN201580080283.8A patent/CN107614216B/zh active Active
- 2015-05-25 US US15/576,174 patent/US10112305B2/en active Active
- 2015-05-25 RU RU2017145304A patent/RU2678857C1/ru active
- 2015-05-25 CA CA2986736A patent/CA2986736C/en active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09174482A (ja) | 1995-12-25 | 1997-07-08 | Fanuc Ltd | ロボットの故障診断方法 |
| JP2002175104A (ja) * | 2000-12-05 | 2002-06-21 | Murata Mach Ltd | 異常負荷監視機能付き工作機械 |
| JP2009226488A (ja) * | 2008-03-19 | 2009-10-08 | Kanto Auto Works Ltd | ロボット内蔵減速機の故障診断方法及び装置 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102054771B1 (ko) * | 2018-06-15 | 2019-12-11 | 두림야스카와(주) | 로봇의 토크 부하율을 이용한 고장 예측방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| CA2986736A1 (en) | 2016-12-01 |
| MX365231B (es) | 2019-05-27 |
| MX2017014937A (es) | 2018-04-13 |
| CA2986736C (en) | 2018-12-04 |
| ES2763004T3 (es) | 2020-05-26 |
| US10112305B2 (en) | 2018-10-30 |
| EP3305482A1 (en) | 2018-04-11 |
| JP6428933B2 (ja) | 2018-11-28 |
| US20180133901A1 (en) | 2018-05-17 |
| KR101889248B1 (ko) | 2018-08-16 |
| EP3305482A4 (en) | 2018-08-29 |
| WO2016189608A1 (ja) | 2016-12-01 |
| RU2678857C1 (ru) | 2019-02-04 |
| JPWO2016189608A1 (ja) | 2018-03-08 |
| BR112017025292B1 (pt) | 2021-02-02 |
| CN107614216A (zh) | 2018-01-19 |
| EP3305482B1 (en) | 2019-10-09 |
| CN107614216B (zh) | 2018-09-18 |
| BR112017025292A2 (pt) | 2018-08-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101889248B1 (ko) | 고장 진단 장치 및 고장 진단 방법 | |
| KR101849895B1 (ko) | 고장 진단 장치 및 고장 진단 방법 | |
| KR101930198B1 (ko) | 고장 진단 장치 및 고장 진단 방법 | |
| KR101849894B1 (ko) | 고장 진단 장치 및 고장 진단 방법 | |
| CN107614213B (zh) | 故障诊断装置及故障诊断方法 | |
| WO2019211892A1 (ja) | 異常判定装置、異常判定システム及び異常判定方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| PA0105 | International application |
Patent event date: 20171121 Patent event code: PA01051R01D Comment text: International Patent Application |
|
| PA0201 | Request for examination | ||
| PG1501 | Laying open of application | ||
| A302 | Request for accelerated examination | ||
| PA0302 | Request for accelerated examination |
Patent event date: 20180213 Patent event code: PA03022R01D Comment text: Request for Accelerated Examination |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20180320 Patent event code: PE09021S01D |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
Patent event code: PE07011S01D Comment text: Decision to Grant Registration Patent event date: 20180720 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
Comment text: Registration of Establishment Patent event date: 20180809 Patent event code: PR07011E01D |
|
| PR1002 | Payment of registration fee |
Payment date: 20180809 End annual number: 3 Start annual number: 1 |
|
| PG1601 | Publication of registration | ||
| FPAY | Annual fee payment |
Payment date: 20210715 Year of fee payment: 4 |
|
| PR1001 | Payment of annual fee |
Payment date: 20210715 Start annual number: 4 End annual number: 4 |
|
| FPAY | Annual fee payment |
Payment date: 20220630 Year of fee payment: 5 |
|
| PR1001 | Payment of annual fee |
Payment date: 20220630 Start annual number: 5 End annual number: 5 |
|
| PR1001 | Payment of annual fee |
Payment date: 20230802 Start annual number: 6 End annual number: 6 |