KR20170142363A - 차량 운전 보조 장치 및 방법 - Google Patents
차량 운전 보조 장치 및 방법 Download PDFInfo
- Publication number
- KR20170142363A KR20170142363A KR1020160075690A KR20160075690A KR20170142363A KR 20170142363 A KR20170142363 A KR 20170142363A KR 1020160075690 A KR1020160075690 A KR 1020160075690A KR 20160075690 A KR20160075690 A KR 20160075690A KR 20170142363 A KR20170142363 A KR 20170142363A
- Authority
- KR
- South Korea
- Prior art keywords
- bird
- image
- eye
- vehicle
- eye view
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000000034 method Methods 0.000 title claims abstract description 131
- 235000004522 Pentaglottis sempervirens Nutrition 0.000 claims abstract description 553
- 240000004050 Pentaglottis sempervirens Species 0.000 claims abstract description 503
- 238000001514 detection method Methods 0.000 claims description 11
- 238000004364 calculation method Methods 0.000 claims description 9
- 230000002093 peripheral effect Effects 0.000 claims description 5
- 230000008569 process Effects 0.000 description 26
- 241000905137 Veronica schmidtiana Species 0.000 description 15
- 238000010586 diagram Methods 0.000 description 14
- 230000015572 biosynthetic process Effects 0.000 description 7
- 230000008859 change Effects 0.000 description 7
- 238000003786 synthesis reaction Methods 0.000 description 7
- 230000002194 synthesizing effect Effects 0.000 description 7
- 238000012545 processing Methods 0.000 description 6
- 230000008901 benefit Effects 0.000 description 5
- 238000006243 chemical reaction Methods 0.000 description 4
- 238000005516 engineering process Methods 0.000 description 4
- 230000014509 gene expression Effects 0.000 description 4
- 238000010191 image analysis Methods 0.000 description 4
- 230000009466 transformation Effects 0.000 description 4
- 238000004458 analytical method Methods 0.000 description 1
- 238000007796 conventional method Methods 0.000 description 1
- 238000003703 image analysis method Methods 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
Images









Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R1/00—Optical viewing arrangements; Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles
- B60R1/20—Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles
- B60R1/22—Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles for viewing an area outside the vehicle, e.g. the exterior of the vehicle
- B60R1/23—Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles for viewing an area outside the vehicle, e.g. the exterior of the vehicle with a predetermined field of view
- B60R1/27—Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles for viewing an area outside the vehicle, e.g. the exterior of the vehicle with a predetermined field of view providing all-round vision, e.g. using omnidirectional cameras
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R1/00—Optical viewing arrangements; Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R1/00—Optical viewing arrangements; Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles
- B60R1/20—Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles
- B60R1/22—Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles for viewing an area outside the vehicle, e.g. the exterior of the vehicle
- B60R1/23—Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles for viewing an area outside the vehicle, e.g. the exterior of the vehicle with a predetermined field of view
- B60R1/26—Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles for viewing an area outside the vehicle, e.g. the exterior of the vehicle with a predetermined field of view to the rear of the vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/02—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to ambient conditions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/57—Mechanical or electrical details of cameras or camera modules specially adapted for being embedded in other devices
-
- H04N5/2257—
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R2300/00—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle
- B60R2300/60—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by monitoring and displaying vehicle exterior scenes from a transformed perspective
- B60R2300/607—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by monitoring and displaying vehicle exterior scenes from a transformed perspective from a bird's eye viewpoint
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R2300/00—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle
- B60R2300/80—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the intended use of the viewing arrangement
- B60R2300/8046—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the intended use of the viewing arrangement for replacing a rear-view mirror system
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W2050/146—Display means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2420/00—Indexing codes relating to the type of sensors based on the principle of their operation
- B60W2420/40—Photo, light or radio wave sensitive means, e.g. infrared sensors
- B60W2420/403—Image sensing, e.g. optical camera
-
- B60W2420/42—
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Mechanical Engineering (AREA)
- Automation & Control Theory (AREA)
- Transportation (AREA)
- Signal Processing (AREA)
- Physics & Mathematics (AREA)
- Mathematical Physics (AREA)
- Human Computer Interaction (AREA)
- Traffic Control Systems (AREA)
- Closed-Circuit Television Systems (AREA)
Abstract
Description
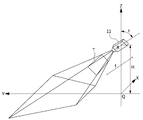
도 2는 종래 기술에 따른 조감도 이미지 생성 방법에 대한 개념도이다.
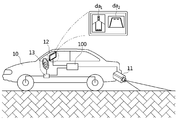
도 3은 본 발명의 일 실시예에 따른 차량 운전 보조 장치에 대한 개념도이다.
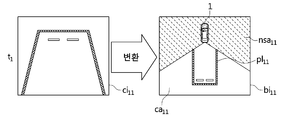
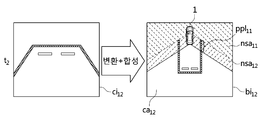
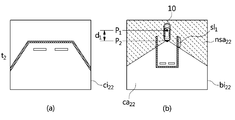
도 4 및 도 5는 본 발명의 일 실시예에 따른 차량 운전 보조 장치를 통한 조감도 이미지의 생성 방법을 설명하기 위한 개념도이다.
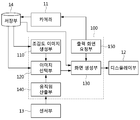
도 6은 본 발명의 일 실시예에 따른 차량 운전 보조 장치에 대한 블록도이다.
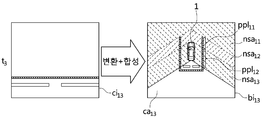
도 7 내지 도 9는 본 발명의 일 실시예에 따른 차량 운전 보조 장치에 의해 운전자에게 제공되는 조감도 이미지를 생성하는 방법에 대한 개념도이다.
도 10 및 도 11은 본 발명의 일 실시예에 따른 차량 운전 보조 장치를 통한 조감도 이미지 생성 방법을 설명하기 위한 개념도이다.
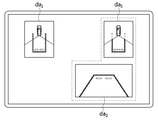
도 12a, 도 12b, 도 12c 및 도 12d는 본 발명의 일 실시예에 따른 출력 화면 생성부를 통해 생성된 출력 화면의 예시들을 설명하기 위한 개념도이다.
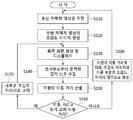
도 13은 본 발명의 일 실시예에 따른 차량 운전 보조 방법에 대한 흐름도이다.

110 : 조감도 이미지 생성부 110 : 이미지 선택부
130 : 화면 생성부 140 : 움직임 산출부
150 : 출력 화면 요청부
Claims (27)
- 카메라 및 디스플레이부가 장착된 차량에 적용되어, 차량의 운전을 보조하기 위한 차량 운전 보조 장치로서,
상기 카메라를 통해 촬영된 카메라 영상을 이용하여 상기 카메라 영상에 대한 조감도 이미지를 생성하는 조감도 이미지 생성부;
상기 조감도 이미지 중 적어도 일 부분이 포함되는 조감도 이미지 영역을 포함하는 출력 화면을 생성하는 화면 생성부; 및
설정된 조감도 이미지 교체 조건에 충족될 경우, 상기 조감도 이미지 영역에 포함된 조감도 이미지의 생성 시점 이후에 상기 조감도 이미지 생성부를 통해 생성된 복수의 조감도 이미지들 중 하나의 새로운 조감도 이미지를 선택하는 이미지 선택부를 포함하고,
상기 화면 생성부는 상기 조감도 이미지를 상기 이미지 선택부가 선택한 새로운 조감도 이미지로 교체해서 출력 화면을 생성하는 것을 특징으로 하는 차량 운전 보조 장치. - 제1항에 있어서,
상기 카메라는 상기 차량의 후방을 촬영하는 후방 카메라인 것을 특징으로 하는 차량 운전 보조 장치. - 제1항에 있어서,
상기 이미지 선택부는,
상기 차량이 후진 상태로부터 전진 상태로 또는 전진 상태로부터 후진 상태로 변경될 때, 상기 조감도 이미지 영역에 포함된 조감도 이미지의 생성 시점 이전에 생성된 복수의 조감도 이미지들 중 하나의 새로운 조감도 이미지를 선택하는 것을 특징으로 하는 차량 운전 보조 장치. - 제1항에 있어서,
상기 이미지 선택부는 상기 차량의 진행 방향이 전진 방향으로부터 후진 방향으로 또는 후진 방향으로부터 전진 방향으로 변경된 이후, 설정된 이미지 교체 조건에 충족될 때, 상기 조감도 이미지 영역에 포함된 조감도 이미지의 생성 시점 이전에 생성된 복수의 조감도 이미지들 중 하나의 새로운 조감도 이미지를 선택하는 것을 특징으로 하는 차량 운전 보조 장치. - 제1항에 있어서,
상기 이미지 선택부는 차량의 이동 거리가 임계 교체 이동 거리 이상인 경우, 상기 조감도 이미지 교체 조건에 충족된 것으로 판단하는 것을 특징으로 하는 차량 운전 보조 장치. - 제1항에 있어서,
상기 화면 생성부는 차량의 이동 거리가 상기 임계 교체 이동 거리 미만인 경우, 차량의 이동 거리에 대응하여 상기 조감도 이미지의 다른 부분을 상기 조감도 이미지 영역으로 생성하는 것을 특징으로 하는 차량 운전 보조 장치. - 제1항에 있어서,
상기 이미지 선택부는,
설정된 조감도 이미지 교체 조건에 충족될 경우, 상기 조감도 이미지 영역에 포함된 조감도 이미지의 생성 시점 이후에 생성된 조감도 이미지들 중 하나의 새로운 조감도 이미지를 선택하는 것을 특징으로 하는 차량 운전 보조 장치. - 제7항에 있어서,
상기 이미지 선택부는,
설정된 이미지 교체 조건에 충족될 경우, 차량의 이동 거리가 임계 교체 이동 거리 미만인 시점에 생성된 조감도 이미지를 새로운 조감도 이미지로 선택하는 것을 특징으로 하는 차량 운전 보조 장치. - 제1항에 있어서,
차량에 장착된 센서부를 통한 감지 신호를 근거로 차량의 이동 거리를 산출하는 움직임 산출부를 더 포함하는 것을 특징으로 하는 차량 운전 보조 장치. - 제9항에 있어서,
상기 움직임 산출부는 상기 감지 신호를 근거로 차량의 회전 반경 및 바퀴 각도를 더 산출하는 것을 특징으로 하는 차량 운전 보조 장치. - 제10항에 있어서,
상기 화면 생성부는,
상기 차량의 바퀴 각도와 상기 차량의 이동 거리에 대응하도록, 상기 조감도 이미지 영역에 포함된 조감도 이미지를 회전 이동시키는 것을 특징으로 하는 차량 운전 보조 장치. - 제1항에 있어서,
상기 화면 생성부는 상기 출력 화면의 조감도 이미지 영역에 차량 아이콘을 더 표시하는 것을 특징으로 하는 차량 운전 보조 장치. - 제1항에 있어서,
상기 출력 화면은 실시간 영상 영역을 더 포함하고, 상기 화면 생성부는 상기 카메라를 통해 촬영된 카메라 영상을 상기 실시간 영상 영역에 실시간으로 표시하는 것을 특징으로 하는 차량 운전 보조 장치. - 제13항에 있어서,
상기 조감도 이미지 영역과 상기 실시간 영상 영역은 분리되어 상기 출력 화면 상에 배치되는 것을 특징으로 하는 차량 운전 보조 장치. - 제1항에 있어서,
상기 출력 화면은 제 1 조감도 이미지 영역과 제 2 조감도 이미지 영역을 포함하고, 상기 제 1 조감도 이미지 영역에는 상기 이미지 선택부를 통해 선택된 조감도 이미지 중 적어도 일 부분이 포함되고, 상기 제 2 조감도 이미지 영역에는 상기 조감도 이미지 생성부를 통해 가장 최근에 생성된 조감도 이미지의 적어도 일 부분이 포함되는 것을 특징으로 하는 차량 운전 보조 장치. - 제15항에 있어서,
상기 차량의 주변 영역은 상기 제 1 조감도 이미지 영역과 상기 제 2 조감도 이미지 영역을 통해 상기 출력 화면 내에 표현되고, 상기 제 1 조감도 이미지 영역과 상기 제 2 조감도 이미지 영역은 상기 출력 화면 내에 분리되어 배치되며, 상기 주변 영역의 서로 다른 부분을 출력하는 차량 운전 보조 장치. - 카메라 및 디스플레이부가 장착된 차량에 적용되어, 차량의 주차를 지원하기 위한 차량 운전 보조 방법으로서,
상기 카메라를 통해 촬영된 카메라 영상을 이용하여 상기 카메라 영상에 대한 조감도 이미지를 생성하는 단계;
상기 조감도 이미지 중 적어도 일 부분이 표시되는 조감도 이미지 영역을 포함하는 출력 화면을 생성하는 단계;
설정된 조감도 이미지 교체 조건의 충족 여부를 판단하는 단계; 및
설정된 조감도 이미지 교체 조건에 충족될 경우, 상기 조감도 이미지 영역에 포함된 조감도 이미지의 생성 시점 이후에 상기 조감도 이미지 생성부를 통해 생성된 복수의 조감도 이미지들 중 하나의 새로운 조감도 이미지를 선택하는 단계를 포함하고,
상기 출력 화면을 생성하는 단계는,
상기 조감도 이미지를 상기 이미지 선택부가 선택한 새로운 조감도 이미지로 교체해서 출력 화면을 생성하는 단계를 포함하는 것을 특징으로 하는 차량 운전 보조 방법. - 제17항에 있어서,
상기 카메라는 상기 차량의 후방을 촬영하는 후방 카메라인 것을 특징으로 하는 차량 운전 보조 방법. - 제17항에 있어서,
상기 하나의 새로운 조감도 이미지를 선택하는 단계는,
상기 차량이 후진 상태로부터 전진 상태로 또는 전진 상태로부터 후진 상태로 변경될 때, 상기 조감도 이미지 영역에 포함된 조감도 이미지의 생성 시점 이전에 생성된 복수의 조감도 이미지들 중 하나의 새로운 조감도 이미지를 선택하는 것을 특징으로 하는 차량 운전 보조 방법. - 제17항에 있어서,
상기 하나의 새로운 조감도 이미지를 선택하는 단계는,
상기 차량이 후진 상태로부터 전 상태로 또는 전진 상태로부터 후진 상태로 변경된 이후, 설정된 이미지 교체 조건에 충족될 때 상기 조감도 이미지 영역에 포함된 조감도 이미지의 생성 시점 이전에 생성된 복수의 조감도 이미지들 중 하나의 새로운 조감도 이미지를 선택하는 것을 특징으로 하는 차량 운전 보조 방법. - 제17항에 있어서,
상기 설정된 조감도 이미지 교체 조건의 충족 여부를 판단하는 단계는 차량의 이동 거리가 임계 교체 이동 거리 이상인 경우, 상기 조감도 이미지 교체 조건에 충족된 것으로 판단하는 것을 특징으로 하는 차량 운전 보조 방법. - 제17항에 있어서,
상기 출력 화면을 생성하는 단계는 차량의 이동 거리가 상기 임계 교체 이동 거리 미만인 경우, 차량의 이동 거리에 대응하여 상기 조감도 이미지의 다른 부분을 상기 조감도 이미지 영역으로 생성하는 것을 특징으로 하는 차량 운전 보조 방법. - 제17항에 있어서,
상기 하나의 새로운 조감도 이미지를 선택하는 단계는,
설정된 조감도 이미지 교체 조건에 충족될 경우, 상기 조감도 이미지 영역에 포함된 조감도 이미지의 생성 시점 이후에 생성된 조감도 이미지들 중 하나의 새로운 조감도 이미지를 선택하는 것을 특징으로 하는 차량 운전 보조 방법. - 제23항에 있어서,
상기 하나의 새로운 조감도 이미지를 선택하는 단계는,
설정된 이미지 교체 조건에 충족될 경우, 차량의 이동 거리가 임계 교체 이동 거리 미만인 시점에 생성된 조감도 이미지를 새로운 조감도 이미지로 선택하는 것을 특징으로 하는 차량 운전 보조 방법. - 제17항에 있어서,
차량에 장착된 센서부를 통한 감지 신호를 근거로 차량의 이동 거리를 산출하는 단계를 더 포함하는 것을 특징으로 하는 차량 운전 보조 방법. - 제17항에 있어서,
상기 출력 화면은 실시간 영상 영역을 더 포함하고,
상기 출력 화면을 생성하는 단계는 상기 카메라를 통해 촬영된 카메라 영상을 상기 실시간 영상 영역에 실시간으로 표시하는 것을 특징으로 하는 차량 운전 보조 방법. - 제17항에 있어서,
상기 출력 화면은 제 1 조감도 이미지 영역과 제 2 조감도 이미지 영역을 포함하고, 상기 제 1 조감도 이미지 영역에는 상기 이미지 선택부를 통해 선택된 조감도 이미지 중 적어도 일 부분이 포함되고, 상기 제 2 조감도 이미지 영역에는 상기 조감도 이미지 생성부를 통해 가장 최근에 생성된 조감도 이미지의 적어도 일 부분이 포함되는 것을 특징으로 하는 차량 운전 보조 장치.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020160075690A KR101861523B1 (ko) | 2016-06-17 | 2016-06-17 | 차량 운전 보조 장치 및 방법 |
| PCT/KR2017/006258 WO2017217788A2 (ko) | 2016-06-17 | 2017-06-15 | 차량 운전 보조 장치 및 방법 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020160075690A KR101861523B1 (ko) | 2016-06-17 | 2016-06-17 | 차량 운전 보조 장치 및 방법 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20170142363A true KR20170142363A (ko) | 2017-12-28 |
| KR101861523B1 KR101861523B1 (ko) | 2018-07-05 |
Family
ID=60664296
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020160075690A Active KR101861523B1 (ko) | 2016-06-17 | 2016-06-17 | 차량 운전 보조 장치 및 방법 |
Country Status (2)
| Country | Link |
|---|---|
| KR (1) | KR101861523B1 (ko) |
| WO (1) | WO2017217788A2 (ko) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102626499B1 (ko) * | 2023-05-27 | 2024-01-18 | 임철수 | 주차지원시스템이 형성된 자동차 및 그 작동방법 |
| KR102673098B1 (ko) * | 2024-01-01 | 2024-06-07 | 임철수 | 주차지원시스템 |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109131334A (zh) * | 2018-08-30 | 2019-01-04 | 天津布尔科技有限公司 | 通过视频拼接技术分析车辆前向路况的辅助驾驶预警装置 |
| KR20250170222A (ko) | 2024-05-28 | 2025-12-05 | 포인드 주식회사 | 2d 영상에서 공간 내 객체 인식을 통한 충돌 위험 인식 및 알림 방법 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003104149A (ja) * | 2001-09-27 | 2003-04-09 | Equos Research Co Ltd | 駐車支援装置 |
| JP2006252577A (ja) * | 2006-05-11 | 2006-09-21 | Nippon Soken Inc | 地図データ生成装置 |
| JP4945177B2 (ja) * | 2006-07-05 | 2012-06-06 | 三洋電機株式会社 | 車両の運転支援装置 |
| JP6326869B2 (ja) * | 2014-03-05 | 2018-05-23 | 株式会社デンソー | 車両周辺画像表示装置、車両周辺画像表示方法 |
| JP6340969B2 (ja) * | 2014-07-14 | 2018-06-13 | アイシン精機株式会社 | 周辺監視装置、及びプログラム |
-
2016
- 2016-06-17 KR KR1020160075690A patent/KR101861523B1/ko active Active
-
2017
- 2017-06-15 WO PCT/KR2017/006258 patent/WO2017217788A2/ko not_active Ceased
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102626499B1 (ko) * | 2023-05-27 | 2024-01-18 | 임철수 | 주차지원시스템이 형성된 자동차 및 그 작동방법 |
| WO2024248434A1 (ko) * | 2023-05-27 | 2024-12-05 | 임철수 | 주차지원시스템 및 그 시스템이 적용된 자동차 |
| KR102673098B1 (ko) * | 2024-01-01 | 2024-06-07 | 임철수 | 주차지원시스템 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR101861523B1 (ko) | 2018-07-05 |
| WO2017217788A2 (ko) | 2017-12-21 |
| WO2017217788A3 (ko) | 2018-02-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN101085608B (zh) | 停车辅助装置和停车辅助画面 | |
| JP5436086B2 (ja) | 車両周辺画像表示装置および車両周辺画像表示方法 | |
| JP4907883B2 (ja) | 車両周辺画像表示装置および車両周辺画像表示方法 | |
| CN104660985B (zh) | 图像处理设备、电子设备和图像处理方法 | |
| JP4639753B2 (ja) | 運転支援装置 | |
| KR101446897B1 (ko) | 차량 주변 감시 장치 | |
| JP3663801B2 (ja) | 車両後方視界支援装置 | |
| JP5495071B2 (ja) | 車両周辺監視装置 | |
| KR20110026469A (ko) | 주차 지원 장치 및 주차 지원 방법 | |
| CN103609101A (zh) | 车辆周边监视装置 | |
| JP2007099261A (ja) | 駐車支援方法及び駐車支援装置 | |
| JP5045172B2 (ja) | 車両用運転支援装置 | |
| JP3753681B2 (ja) | 監視システム | |
| JP5776995B2 (ja) | 車両用周辺監視装置 | |
| KR101861523B1 (ko) | 차량 운전 보조 장치 및 방법 | |
| WO2018159017A1 (ja) | 車両用表示制御装置、車両用表示システム、車両用表示制御方法およびプログラム | |
| JP2003104145A (ja) | 運転支援表示装置 | |
| JP2012001126A (ja) | 車両用周辺監視装置 | |
| JP4059309B2 (ja) | 車載カメラの画像表示制御方法及びその装置 | |
| JP2011155651A (ja) | 車両周辺画像表示装置および車両周辺画像表示方法 | |
| JP2009087228A (ja) | 画像表示装置 | |
| KR20160107529A (ko) | 차량 이미지가 애니메이션되는 주차 안내 장치 및 방법 | |
| JP2008114691A (ja) | 車両周辺監視装置および車両周辺監視映像表示方法 | |
| JP2006224927A (ja) | 車両周辺視認装置 | |
| JP2007096496A (ja) | 車両周囲表示システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| PA0109 | Patent application |
Patent event code: PA01091R01D Comment text: Patent Application Patent event date: 20160617 |
|
| PA0201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20171115 Patent event code: PE09021S01D |
|
| PG1501 | Laying open of application | ||
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
Patent event code: PE07011S01D Comment text: Decision to Grant Registration Patent event date: 20180514 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
Comment text: Registration of Establishment Patent event date: 20180521 Patent event code: PR07011E01D |
|
| PR1002 | Payment of registration fee |
Payment date: 20180523 End annual number: 3 Start annual number: 1 |
|
| PG1601 | Publication of registration | ||
| PR1001 | Payment of annual fee |
Payment date: 20210225 Start annual number: 4 End annual number: 4 |
|
| PR1001 | Payment of annual fee |
Payment date: 20220209 Start annual number: 5 End annual number: 5 |
|
| PR1001 | Payment of annual fee |
Payment date: 20230209 Start annual number: 6 End annual number: 6 |
|
| PR1001 | Payment of annual fee |
Payment date: 20240313 Start annual number: 7 End annual number: 7 |
|
| PR1001 | Payment of annual fee |
Payment date: 20250519 Start annual number: 8 End annual number: 8 |